

药丸自动分配器的制作教程
电子说
描述
第1步:购物清单









Adafruit Motor Shield v2。 3(装配套件) - Arduino的电机/步进/伺服护罩
Kwmobile湿度温度传感器
Arduino PCM2704 KY-006蜂鸣器被动的AZDelivery Carte
AZDelivery实时时钟,RTC DS3231 I2C,Rasperry Pi
2。 28byj of 48 DC 5 V 4阶段5 de Micro步骤与ULN2003模块用于Arduino
AZDelivery Prototypage Prototype Shield for Arduino UNO R3
AZDelivery PAQUET HD44780 LCD 1602,2X16字符+ l‘接口I2C
OfficeTree®20迷你磁铁OfficeTree®206x2 mm
轴耦合器POLOLU-1203通用移动中心
40针30厘米公母跳线
无焊面包板 - 830孔
USB 2.0 A - BM/M 1.80M
Arduino Pir运动传感器
一组AWG面包板跳线一针
R18-25b按键开关1p关 - (开)
L-793id LED 8mm红色扩散20mcd
L-793gd LED 8mm绿色扩散20mcd
2 x Poussoir Mtallique Carr + Avec Capuchon Bleu
触觉开关6x6mm
2 charn 70x40 mm
greep plast wit 64 mm
knop铝12 mm
ultragel 3gr
50 nagels 2x35
LCD rgb backround light
2球是arings 6.4 mm轴
2个用于激光切割的全mdf板材
1个用于激光切割的有机玻璃
1个电位计
Arduino uno
第2步:关于组件选择的技术提示
分配和再填充的机制需要很高的精度和很小的运动包含药丸的轮子。出于这个原因,我们决定使用两个步进电机。
步进电机是稳定的,可以驱动各种摩擦和惯性负载,不需要反馈。电机也是位置传感器:不需要位置和速度传感器。此外,它们具有出色的可重复性,可以准确地返回到同一位置。
电机护罩驱动两个步进电机。它包含4个H桥,可以控制电机的方向和速度。使用电机护罩,我们增加了自由销的数量。
为了确保药丸始终处于良好状态,湿度和温度传感器可以显着测量内部的温度和湿度分配器。
要通知用户现在是时候接受他的治疗了,我们使用蜂鸣器和实时时钟建立了警报。 RTC模块使用电池运行,即使我们重新编程微控制器或断开主电源,也可以跟踪时间。
两个按钮和一个 RGB液晶显示器允许用户与分配器进行交互。用户还可以通过App for smarphone设置他的治疗和分配时间。他可以通过蓝牙连接链接他的个人设备(蓝牙模块连接到Arduino)。
如果用户需要, PIR传感器会检测到移动他的药,并给出了分配器正确工作的反馈。由于它具有很强的灵敏度和广泛的检测范围,故意在某些方向上进行无法测量,以避免无用的测量。
步骤3:制造零件
在下文中,提供了由3D打印机或激光切割机生产的零件的详细列表。选择所有尺寸和几何方面,以便在具有强连接的所有部件之间具有适当的匹配以及良好的外观设计。
但是,尺寸和几何方面可能会根据不同的目的而改变。在接下来的部分中,可以找到此处列出的所有组件的CAD。
特别是,该项目的最初想法是创建一个带有更多轮子的药丸分配器,以便分配最高的量和最多种类的药丸。对于课程范围,我们仅将注意力限制在其中2个,但在设计上几乎没有任何修改,可以添加更多轮子并达到目标。这就是为什么我们允许您自由修改我们的设计,以便在您喜欢的情况下,您可以更改它并使其适应任何个人品味。
以下是所有三维打印和激光切割部件的列表,其中括号之间的厚度为:
背板(mdf 4 mm)x1
底板(mdf 4 mm)x1
正面板(mdf 4 mm)x1
侧板_无孔(mdf 4 mm)x1
侧板孔(mdf 4 mm) )x1
arduino板(mdf 4 mm)x1
板用于垂直延伸(mdf 4 mm)x1
连接器板(mdf 4 mm)x1
车轮盖板(mdf 4 mm)x2
车轮用板(mdf 4 mm)x2
顶板(有机玻璃4 mm) x1
开口板(mdf 4 mm)x1
轴承座(3d打印)x2
帽轮(3d打印)x2
漏斗(3d打印)x1
漏斗脚(3d打印)x2
PIR支架(3d打印)x1
轮盖插头(3d打印) )x2
轮(3d打印)x2
第4步:激光切割技术图纸






















盒子的装配是为了避免使用胶水而设计的。这样可以实现更清洁的工作,并且如果需要,可以进行拆卸以解决一些问题。
特别是,组装是通过螺栓和螺母进行的。在适当几何形状的孔中,一侧的螺栓和另一侧的螺母完美地配合,以便在所有mdf板之间形成牢固的连接。特别是对于各种板块:
侧板有一个孔,以便让电缆穿过,从而在Arduino和计算机之间建立连接。
前板有2个孔。当人必须拿出已经分配药丸的玻璃时,最低的一个用于使用。另一个用于补充时间。在这种特殊情况下,有一个插头(见后面的设计)可以从下面关闭车轮盖上的孔。该帽的定位确实通过利用该第二孔来执行。一旦插头被定位,使用按钮或应用程序,人可以让轮子一次旋转一个部分并在每个部分放置药丸。
维护板的位置是为了对车轮和车盖定位的轨道进行垂直支撑,以便具有更可靠和坚固的结构。
开口板设计为单词所示,以便于用户重新填充机制
从图中可以看出,顶板是在有机玻璃中完成的。为了能够从外部实现内部发生的事情。
所有其他板材都没有特殊用途,它们的设计是为了使所有部件完美匹配。有些部件可以提供具有不同尺寸和几何形状的特定孔,以便让所有电子元件(如Arduino和电机)或3D打印材料(如漏斗和PIR支架)以适当的方式连接。
步骤5:步骤5:激光切割零件的CAD
步骤6:3D打印技术图纸

















使用位于大学Fablab实验室的Ultimakers 2和Prusa iMK打印机实现3D打印部件。它们的相似之处在于它们都使用与PLA(用于我们所有印刷部件的材料)相同的材料并且具有相同的喷嘴尺寸。特别是Prusa使用更薄的灯丝工作,由于可拆卸板(不需要使用胶水)和传感器可以更加用户友好,可以补偿底板的非平坦表面。
除非对于使用80%填充材料密度的车轮以便具有更硬的轴,否则所有3d打印部件都被实现而留下标准设置。特别是在第一次尝试时,留下20%的填充材料密度作为标准设置而没有注意到错误。在打印结束时,车轮完全实现,但轴立即断裂。为了不再重新打印车轮,由于需要相当长的时间,我们决定采用更智能的解决方案。我们决定重新印刷轴,底座将固定在车轮上,另外还有4个孔,如图所示。
下面将对每个组件进行特殊描述:
轴承座:该组件的实现是为了将轴承保持并支撑在合适的位置。实际上,轴承保持器具有中心孔,该中心孔具有轴承直径的精确尺寸,以便具有非常精确的连接。两个翼部仅用于将部件适当地固定到板上。必须注意的是,轴承的使用是为了维持车轮的轴,否则可能会弯曲。
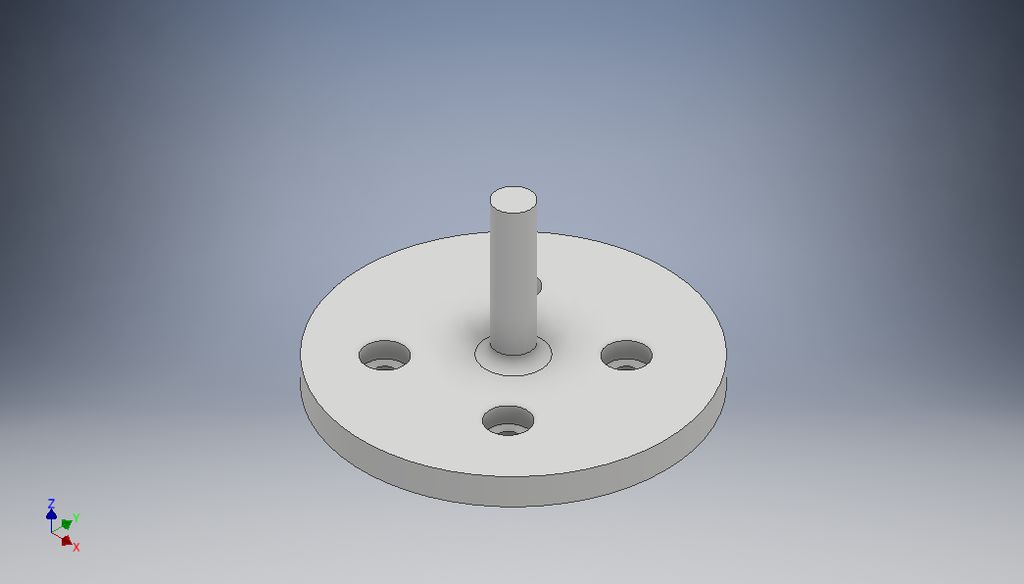
轮子:3d打印几乎代表了我们项目的核心。它的设计应尽可能大,以便保持最大量的药丸,但同时保持轻便且易于被电机驱动。此外,它还设计有四周光滑的边缘,以免药片卡住。它特别包含14个可以分配药丸的部分。中央部分以及每个部分之间的边界已被清空,以使车轮尽可能轻。然后有一个直径6.4毫米,长30毫米的轴,可以完美地安装在另一侧的轴承上。最后,通过轴连接器实现与电机的牢固连接,轴连接器的一侧通过4个孔与车轮连接,图中可以看到这两个孔,另一侧带有步进电机。
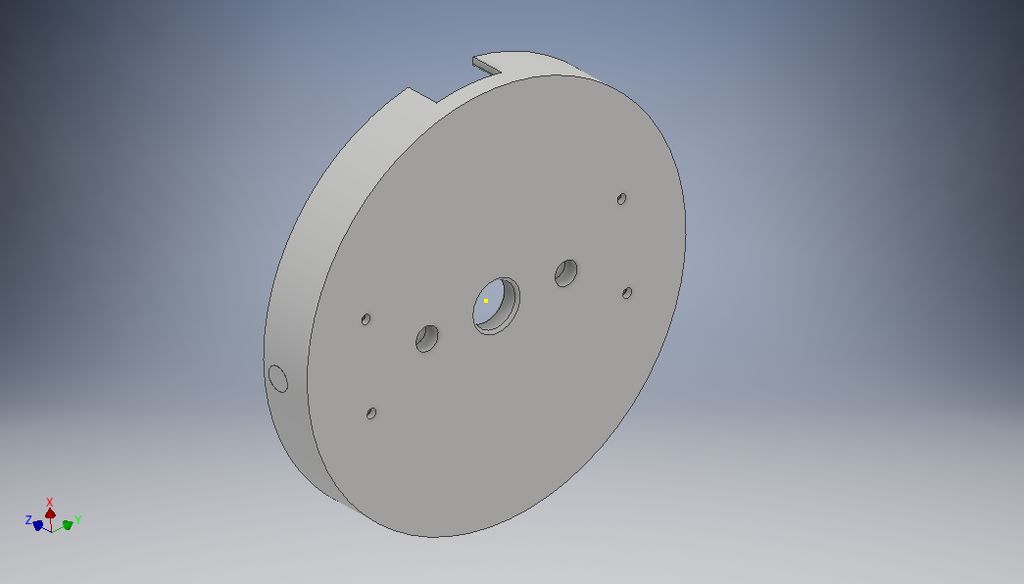
轮盖:轮子的盖子设计成使得一旦进入轮子内的药丸不能从轮子中排出,除非它们到达轮子底部的开口部分。此外,盖子可以保护车轮免受外部环境的影响,确保适当的存放。它的直径略大于车轮本身,并有2个主孔。底部的那个用于释放药丸,而顶部的那个用于先前详述的再填充机制。中心的主孔用于让车轮的轴穿过,剩下的6个孔用于与板和轴承连接。另外,在底侧,存在2个孔,其中放置2个小磁铁。如下所述,这些将与插头有很强的连接。
漏斗:可以清楚地猜到,漏斗的想法是收集从轮子上掉落的药丸并将它们收集在底部的玻璃杯中。特别是对于它的印刷,它已分为2个不同的步骤。有漏斗的主体,然后2英尺已被打印分开,否则打印将暗示太多的支持。对于最终组装,必须将2个部件粘合在一起。
PIR支架:其功能是将PIR保持在合适的位置。它在墙上有一个方孔,以便让电缆穿过,两个臂可以在没有永久性连接的情况下固定PIR。
插头:这个小部件的设计是为了便于再填充机制。如前所述,一旦需要重新填充,则应通过塞子关闭车轮盖的底部,否则填充期间的药丸会掉落。为了便于其与帽2的连接,存在小孔和两个磁体。通过这种方式,带帽的链接非常强大且用户友好。它可以放置到位并通过非常简单的任务移除。
步骤7:步骤7:3D打印零件的CAD
步骤8:步骤8:最终CAD装配
步骤9:测试单个组件
已执行多项单独测试在将所有电子元件连接在一起之前。特别是,视频代表分配和重新灌装机制的测试,按钮功能,LED测试报警。
步骤10:最终汇编







组装的第一部分专门用于安装机器人的结构部件。在底板上,设置了2个侧板和前板,并固定了漏斗。同时,每个车轮通过轴连接器连接到其步进电机,然后安装其盖子。之后,轮盖系统直接安装在机器人上。此时,电子元件设置在机器人上。最后,组装剩余的板块以完成项目。
步骤11:将组件连接到Arduino
步骤12:程序流程图

下面的流程图显示了我们为一个轮子编写的程序的逻辑。
步骤13:编程
步骤14:机器人 - 智能手机应用程序连接



如前所述,通过智能手机应用程序确保与机器人的通信蓝牙模块到机器人。以下图像代表应用程序的功能。第一个代表应用程序的图标,而第二个和第三个分别代表手动分配机制和设置时间菜单。在后一种情况下,分配机制在用户选择的时间自动执行。
- 相关推荐
- 热点推荐
- 分配器
-
单线分配器与双线分配器的区别是什么2024-07-10 3289
-
自动药丸分配器开源项目2023-07-13 803
-
自动洗手分配器开源设计2023-06-30 563
-
如何制作低成本但全自动的洗手液分配器电路2023-05-29 3462
-
RFID药丸分配器开源2022-12-01 903
-
自动酒精分配器开源分享2022-11-29 630
-
自动洗手分配器开源分享2022-11-24 692
-
带Arduino的自动酒精分配器2022-11-21 733
-
制作自己的消毒剂分配器2022-11-09 758
-
药丸自动分配器的制作2019-08-14 3871
-
用CD4017B制作多路脉冲分配器2018-01-31 8786
-
分配器,什么是分配器2010-04-02 4091
-
音视频/信号分配器,音视频/信号分配器是什么意思2010-03-26 3197
-
数据分配器2009-04-07 11203
全部0条评论

快来发表一下你的评论吧 !
