

高海拔气球跟踪器的制作图解
电子说
描述
第1步:原则

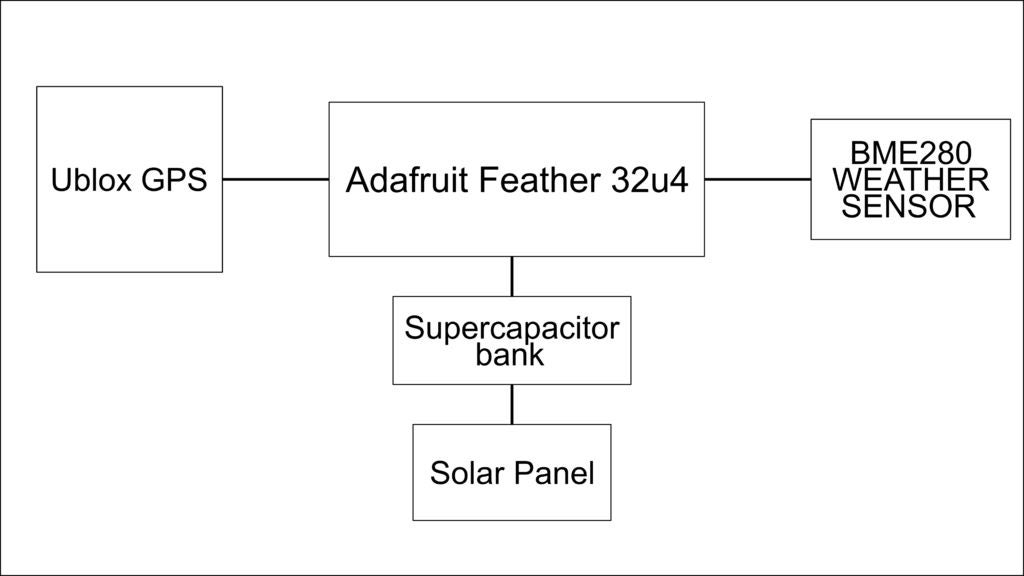
因此,在构建这样的设备时,有许多变化和选择,但每个跟踪器都需要一个发射器和一个电源。大多数跟踪器可能包含这些组件:
- 太阳能电池板
- 电池(脂肪或超级电容器)
- 处理器/微控制器
- GPS模块
- 传感器/s(温度,湿度,压力,紫外线,太阳辐射。..。..)
- 发射器(433MHz,LoRa,WSPR,APRS,LoRaWAN,铱)
如您所见,您可以使用许多传感器和变送器。你使用什么传感器取决于你。它并不重要,但最常见的是温度和压力传感器。但是,选择发射器要困难得多。每种技术都有一些优点和缺点。我不会在这里分解,因为这是一个很长的讨论。重要的是我选择了LoRaWAN并且我认为它是最好的(因为我还没有机会测试其他人)。我知道LoRaWAN可能是最好的报道。
第2步:需要的部分
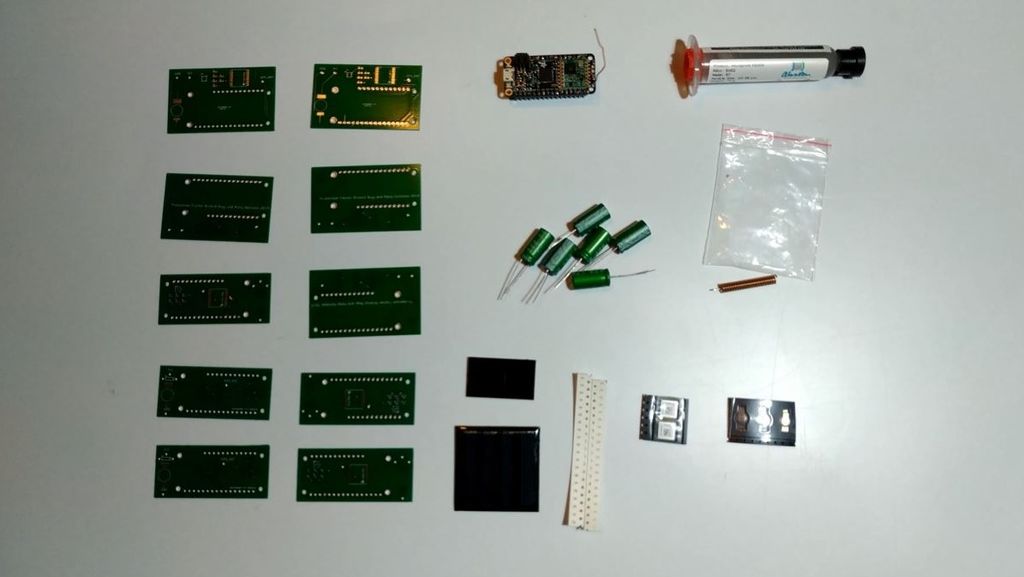
所以,你需要这些这个项目的事情:
Adafruit羽毛32u4 RFM95
Ublox MAX M8Q(最后我们没有使用它)
BME280温度/湿度/压力传感器
2xSupercapacitor 4.7F 2.7V
输出电压为5V的太阳能电池板
自定义PCB
如果您自己启动,您还需要:
至少0.1立方米的氦气(搜索:“15个气球的氦气罐”)在当地购买
Qualatex 36“自密封铝箔气囊
预计项目成本:80欧元(仅限跟踪器)/100欧元(包括气球和氦气)
第3步:推荐工具

这些工具可以派上用场:
剥线器
烙铁
SMD烙铁
钳子
螺丝刀
胶枪
万用表
显微镜
热风枪
您还需要焊膏。
第4步:Adafruit羽毛32U4

我们很难为气球选择合适的微控制器。 Adafruit Feather最适合这份工作。它符合所有要求的标准:
1)它具有所有必需的引脚:SDA/SCL,RX/TX,数字,模拟
2)它具有RFM95 LoRa发送器。
3)它很轻巧。它的质量仅为5.5g。
4)在睡眠模式下(仅30uA)它具有非常低的功耗。
因此,我们认为Adafruit羽毛是最佳微控制器。
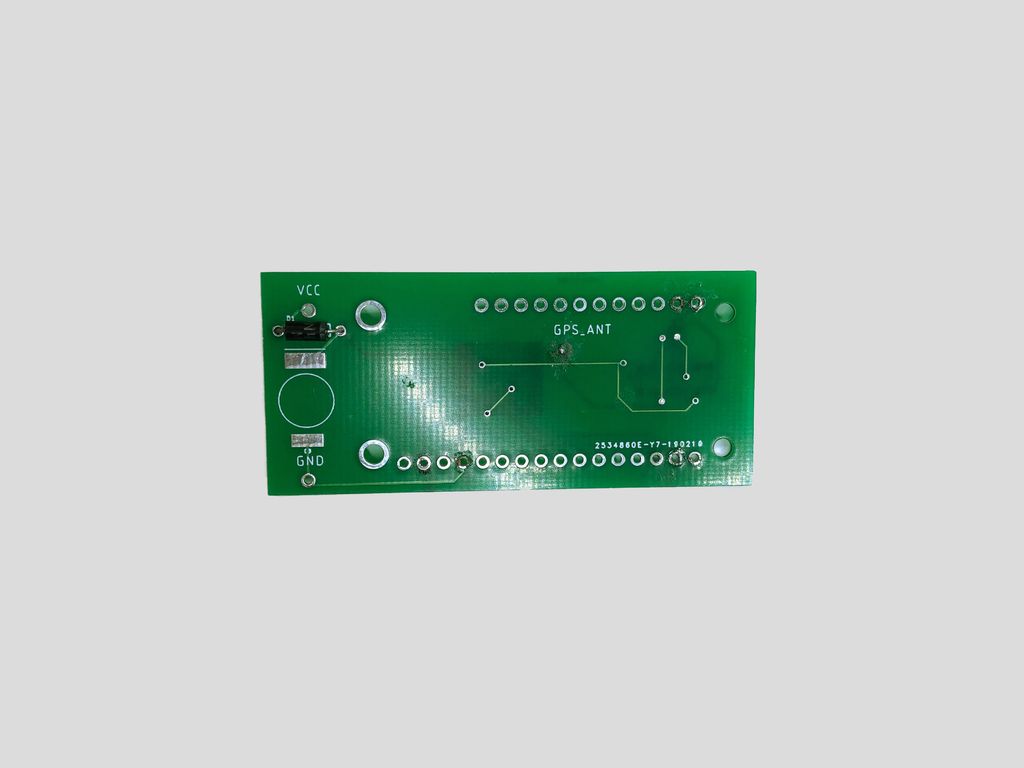
步骤5:PCB设计与制造
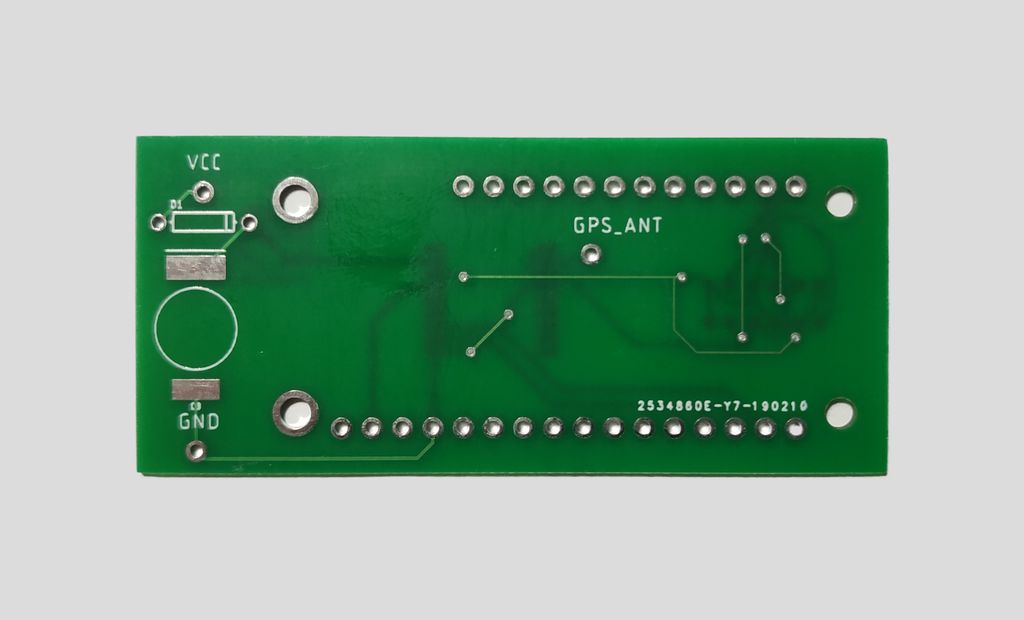
我真的很抱歉我会告诉你的。我们需要制作定制PCB。这将是艰难和令人沮丧的,但这是必要的,所以让我们开始吧。另外,要正确理解以下文本,您应该阅读Instructables这个非常棒的PCB设计类。
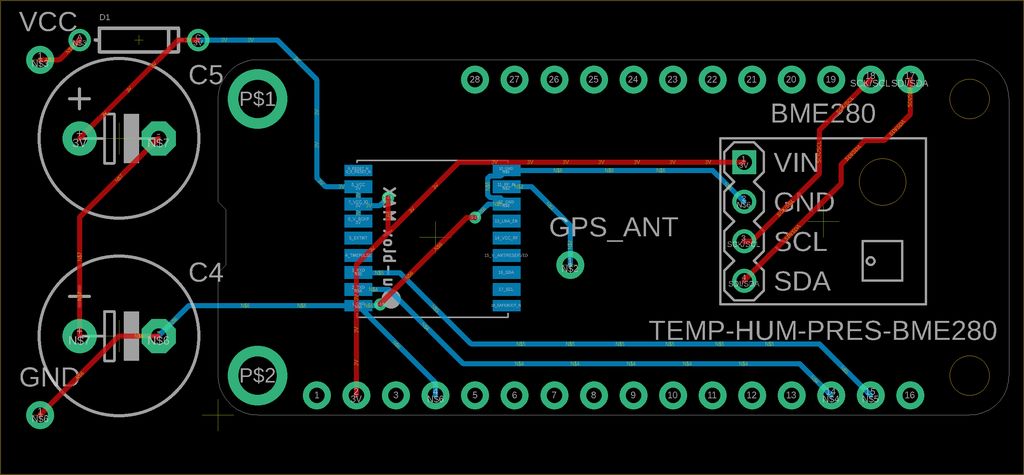
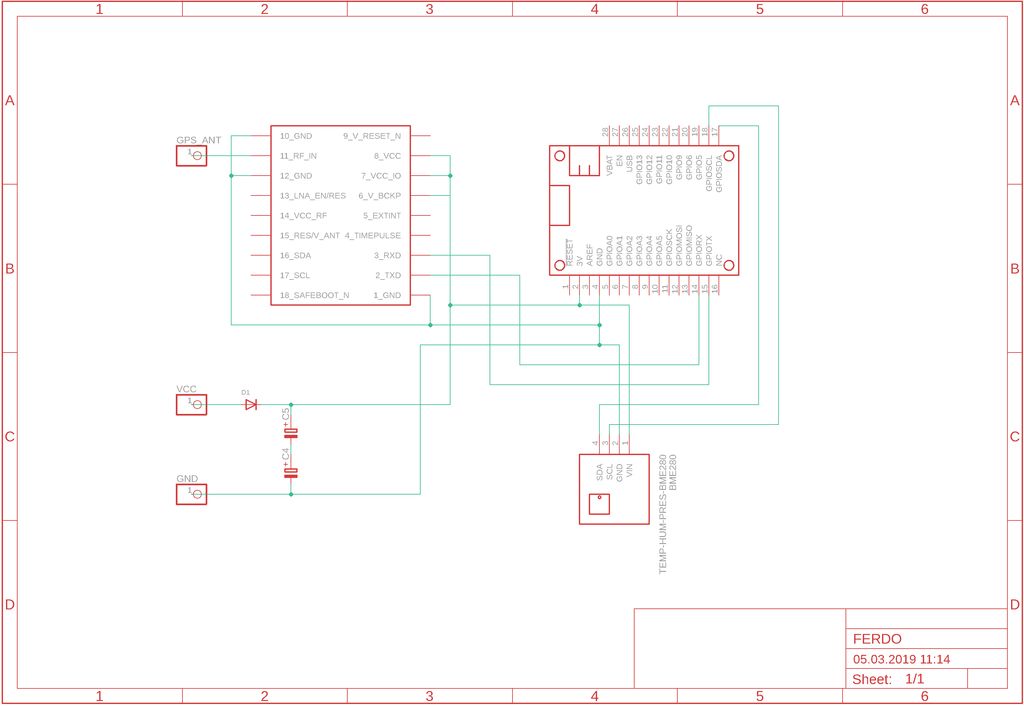
因此,首先您需要制作原理图。我在Autodesk的EAGLE PCB设计软件中制作了原理图和电路板。它是免费的,所以请下载它!
这是我第一次设计PCB,我可以告诉你,这一切都是为了让Eagle接口挂起来。我在6个小时内设计了我的第一块板子,但是我的第二块板子花了不到一个小时。这是结果。我会说一个非常好的原理图和一块板。
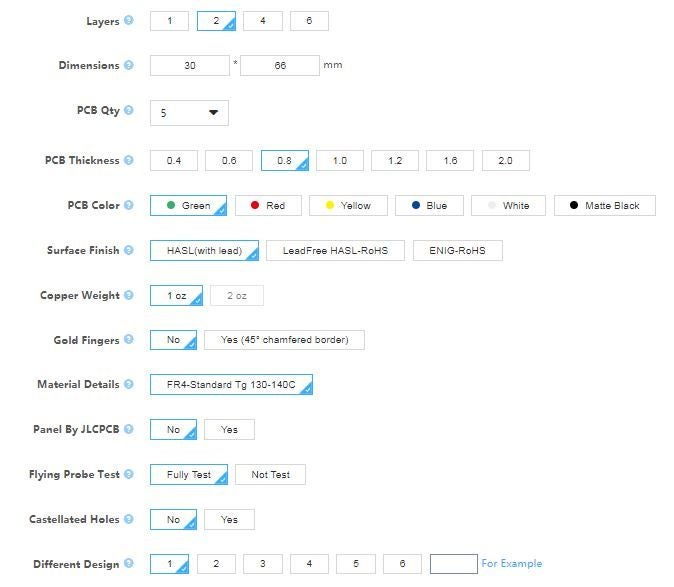
准备好电路板文件后,需要创建gerber文件并将其发送给制造商。我从jlcpcb.com订购了我的主板,但你可以选择你喜欢的任何其他制造商。我将PCB厚度设置为0.8mm而不是标准的1.6mm,因为电路板需要很轻。您可以在屏幕截图中查看我对JLC PCB的设置。
如果您不想下载Eagle,可以下载“Ferdinand 1.0.zip”并将其上传到JLC PCB。
当您订购PCB时,只需坐在椅子上舒适地等待两周,然后再到达。然后我们可以继续。
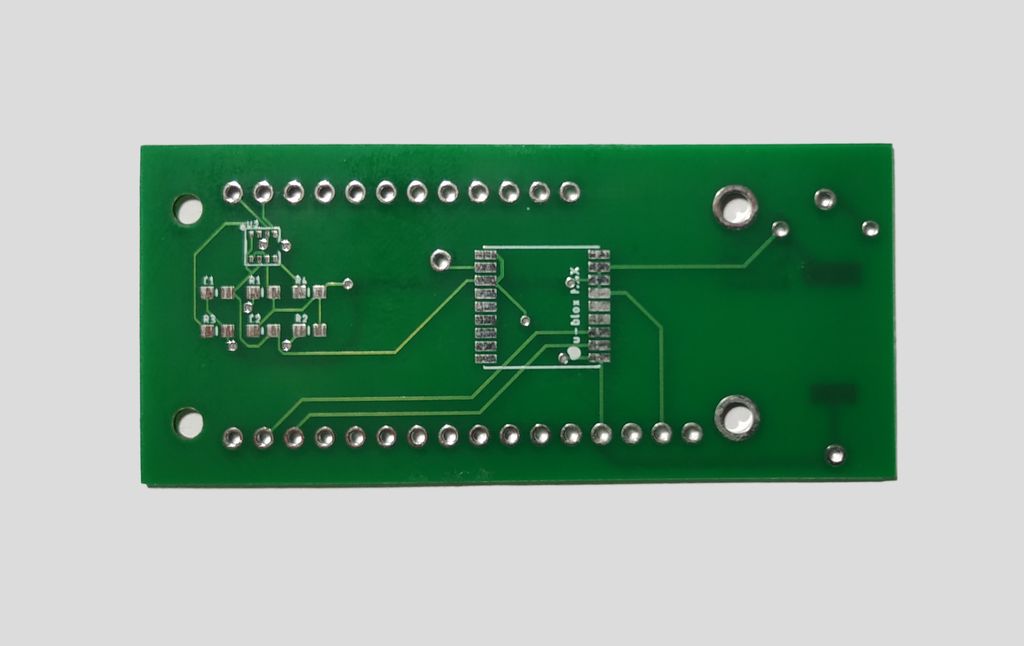
注意:您可以注意到原理图与实际电路板略有不同。那是因为我注意到裸BME280 IC难以焊接,因此我更改了原理图以进行突破。
步骤6:SMD焊接
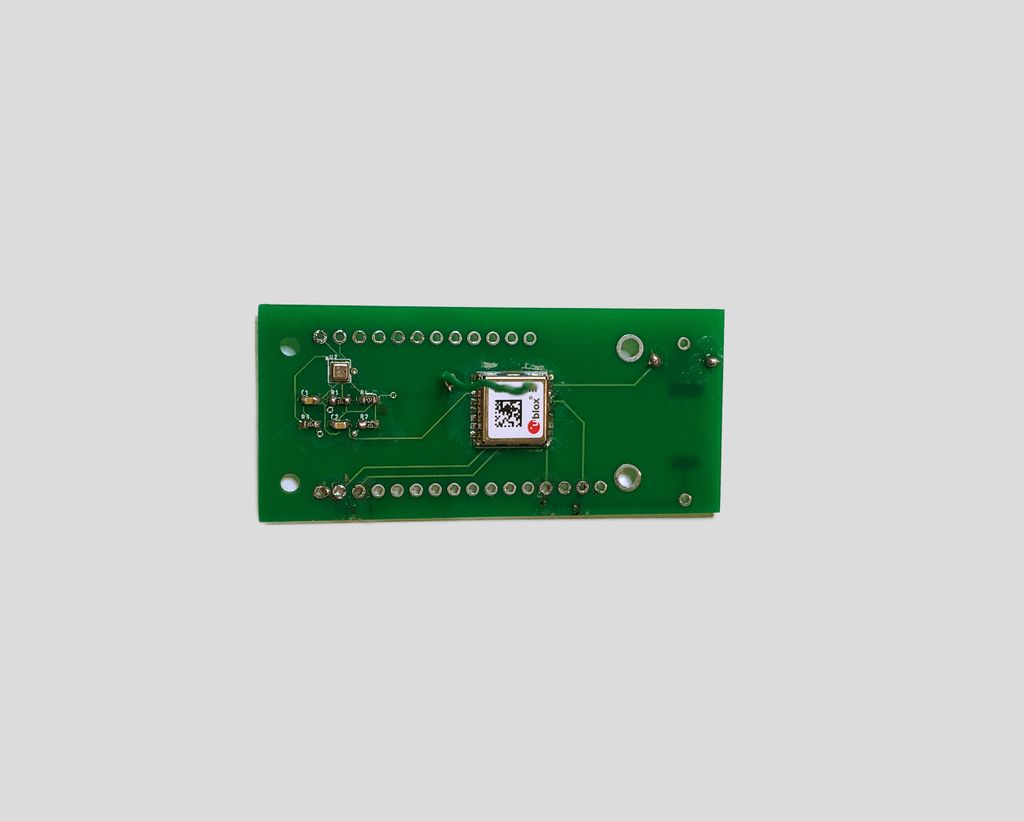

另一个令人遗憾的消息:SMD焊接并不容易。现在真的,它很难受。愿主与你同在。但本教程应该有所帮助。您可以使用烙铁和焊锡芯,焊膏和热风枪进行焊接。这些方法对我来说都不够方便。但是你应该在一小时内完成。
根据PCB上的丝印或原理图放置组件。
步骤7:焊接
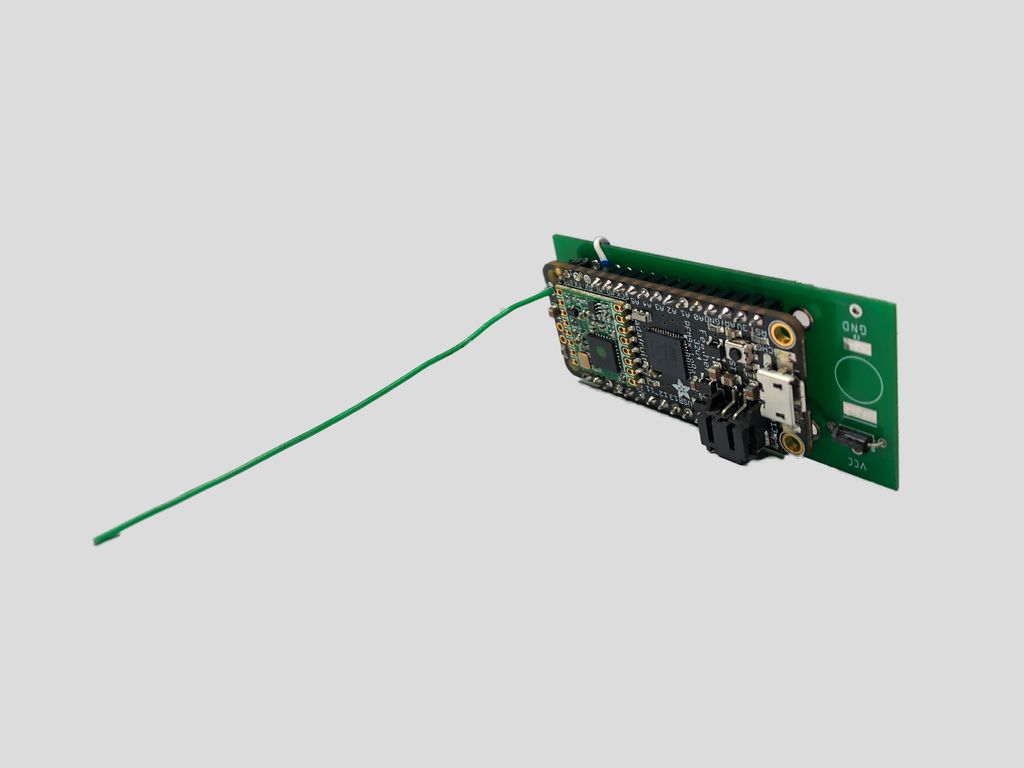
SMD焊接完成后,其余的焊接工作基本上是小菜一碟。几乎。你可能以前焊过了,我希望你再次焊接。你只需要焊接Adafruit羽毛,天线,太阳能电池板和超级电容器。我会说非常简单。
根据PCB上的丝印或原理图放置组件。
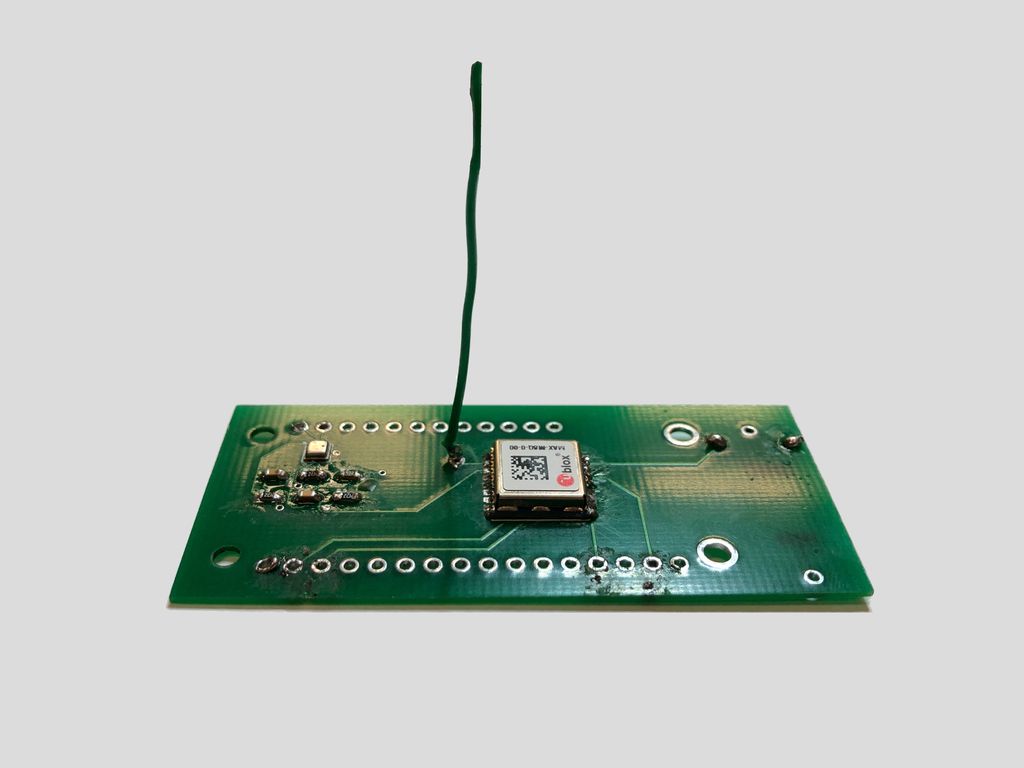
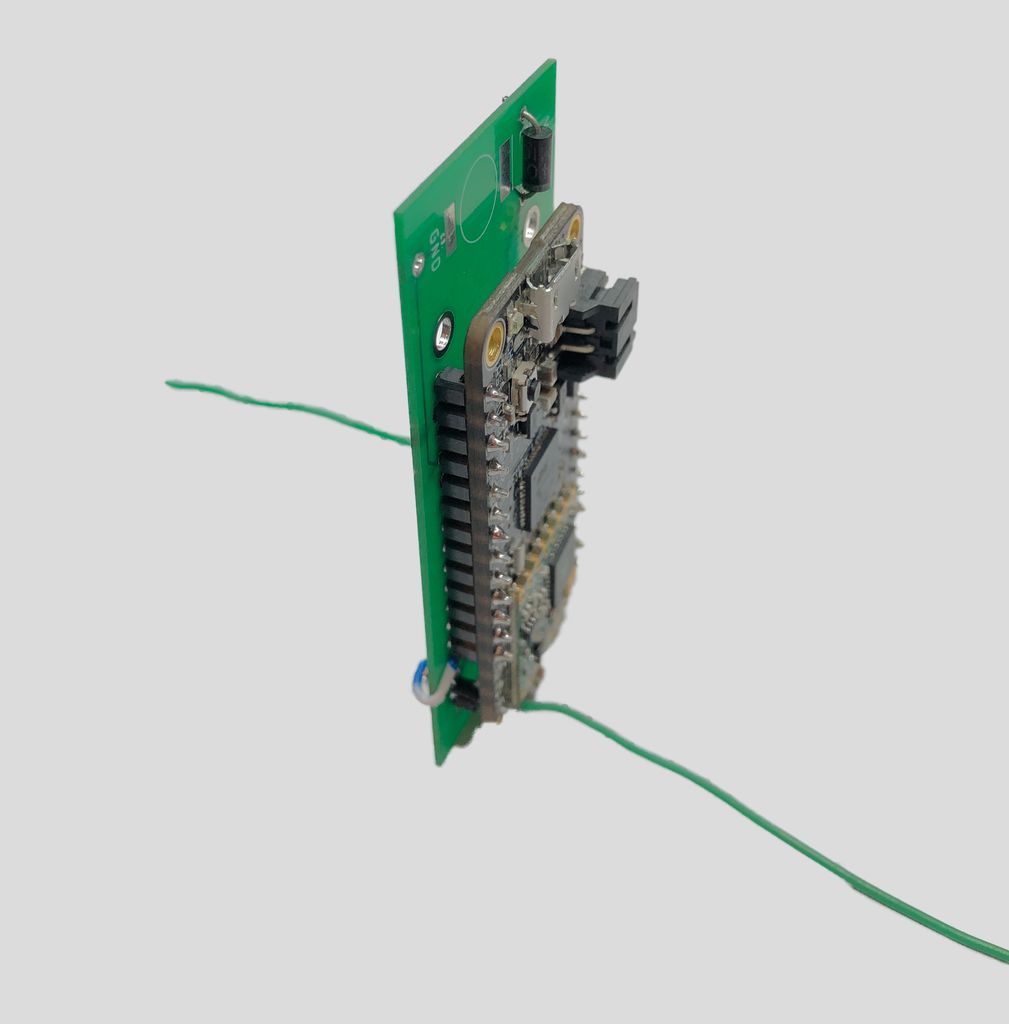
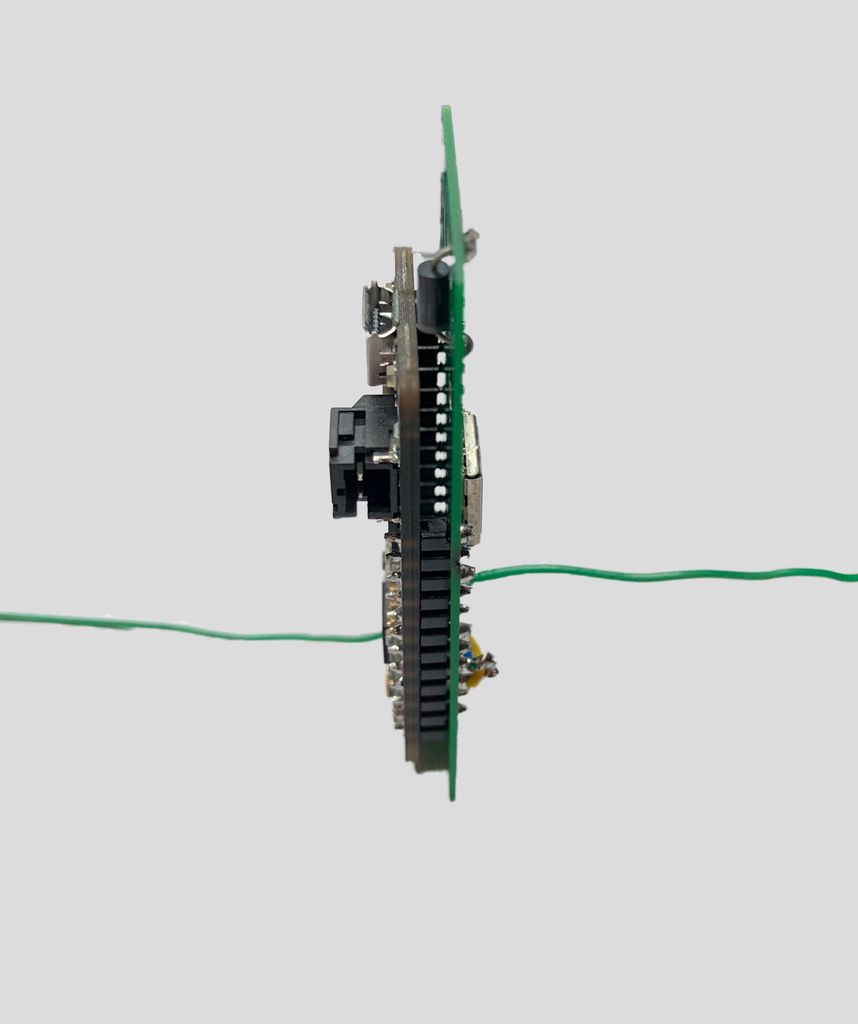
步骤8:完成跟踪器


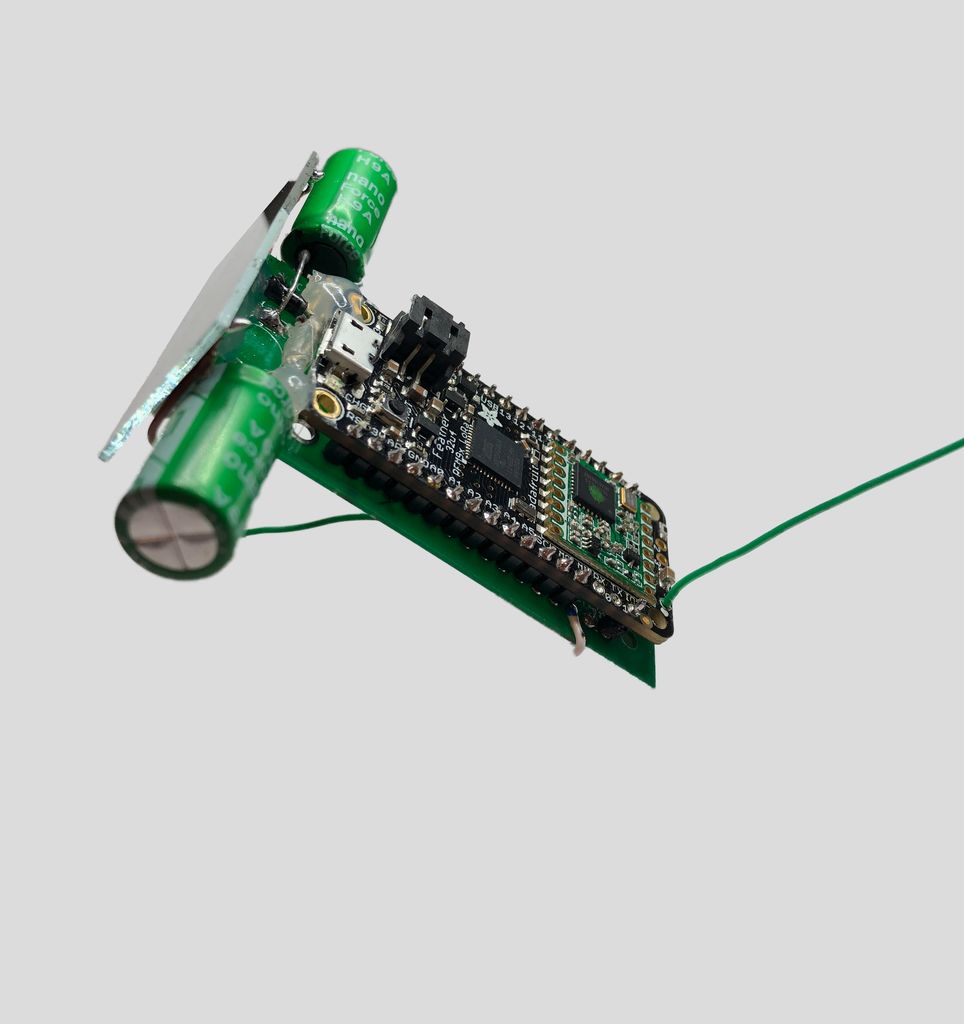

这是完整跟踪器的外观。奇怪的。尼斯。有趣。这些是我马上想到的话。现在你只需要刷新代码并测试它是否正常工作。
步骤9:TTN设置
物联网是以全球城市为中心的社区LoRaWAN网络。超过6887个网关(接收器)启动并运行它是世界上最大的全球物联网网络。它使用LoRa(长距离)通信协议,通常频率为868(欧洲,俄罗斯)或915MHz(美国,印度)。物联网设备在城市中发送短消息的应用最为广泛。您最多只能发送51个字节,但您可以轻松获得2km到15km的范围。这对于简单的传感器或其他物联网设备来说是理想的选择。最重要的是,它是免费的。
现在,2-15肯定是不够的,但如果你达到更高的地位,你应该有更好的联系。我们的气球会非常高。在海平面以上10公里处,我们应该从100公里处获得连接。一位朋友在空中飞行了31公里的LoRa,他在450公里外开了一个地方。所以,这是非常合理的。
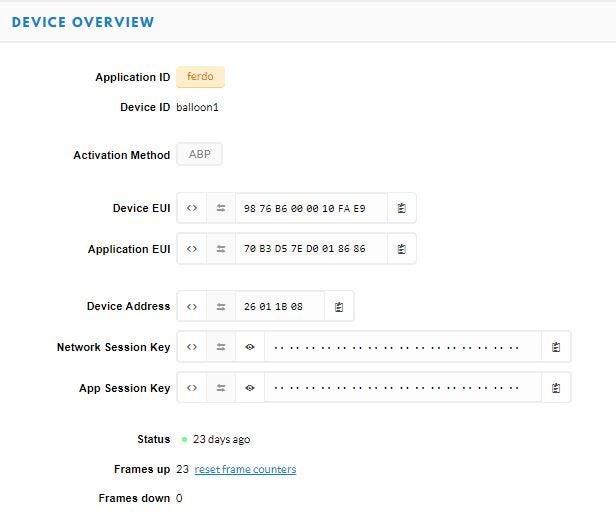
设置TTN应该很容易。您只需要使用电子邮件创建一个帐户,然后您需要注册该设备。首先,您必须创建一个应用程序。应用程序是整个项目主页。从这里,您可以更改解码器代码,查看传入数据和添加/删除设备。只要选一个名字就可以了。完成后,您必须在应用程序中注册设备。您需要输入Adafruit羽毛的MAC地址(包装中有羽毛)。然后你应该将激活方法设置为ABP,你应该禁用帧计数器检查。您的设备现在应该在应用程序中注册。复制设备地址,网络会话密钥和应用会话密钥。您将在下一步中使用它们。
有关更健康的解释,请访问本教程。
步骤10:编码
Adafruit羽毛32U4配有ATmega32U4 AVR处理器。这意味着它没有单独的USB通信芯片(如Arduino UNO),芯片包含在处理器中。这意味着与典型的Arduino板相比,上传到Adafruit Feather可能会有点困难,但它适用于Arduino IDE,因此如果您按照本教程进行操作就应该没问题。
设置完Arduino IDE之后并成功上传“blink”草图,您可以移动到实际代码。下载“LoRa_Test.ino”。相应地更改设备地址,网络会话密钥和应用会话密钥。上传草图。出去。将天线指向市中心或最近的网关方向。您现在应该看到TTN控制台上弹出的数据。如果没有,请在下面评论。我不想把所有可能发生的事情都放在这里,我不知道Instructables服务器是否可以处理这样的大量文本。
继续前进。如果上一个草图有效,您可以下载“Ferdinand_1.0.ino”并更改上一个草图中您应该更改的内容。现在再试一次。
如果你在TTN控制台上获得一些随机的HEX数据,不要担心,它应该这样做。所有值都以HEX编码。您将需要不同的解码器代码。下载“decoder.txt”。复制它的内容。现在去TTN控制台。转到您的应用程序/有效负载格式/解码器。现在删除原始解码器代码并粘贴到您的代码中。您现在应该看到所有读数。
步骤11:测试

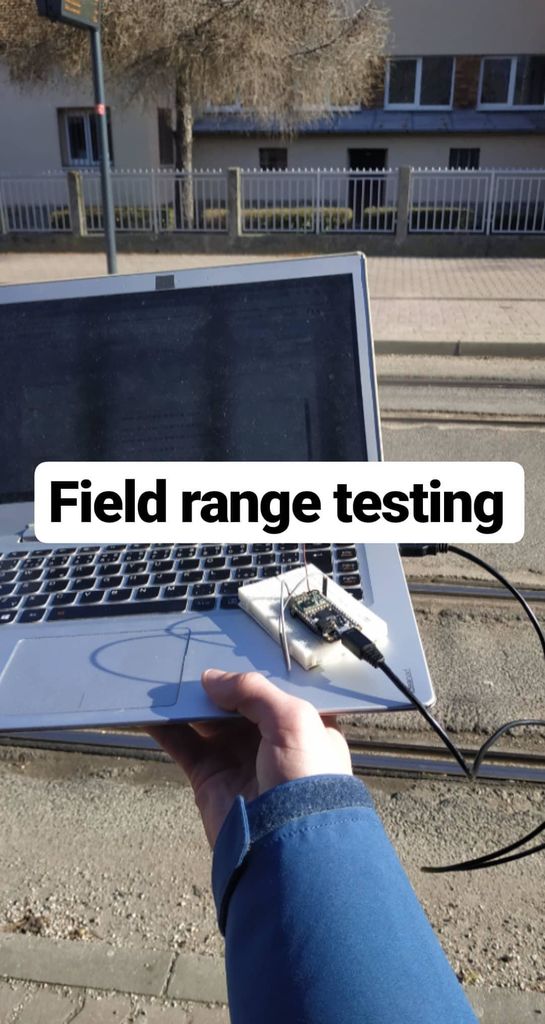
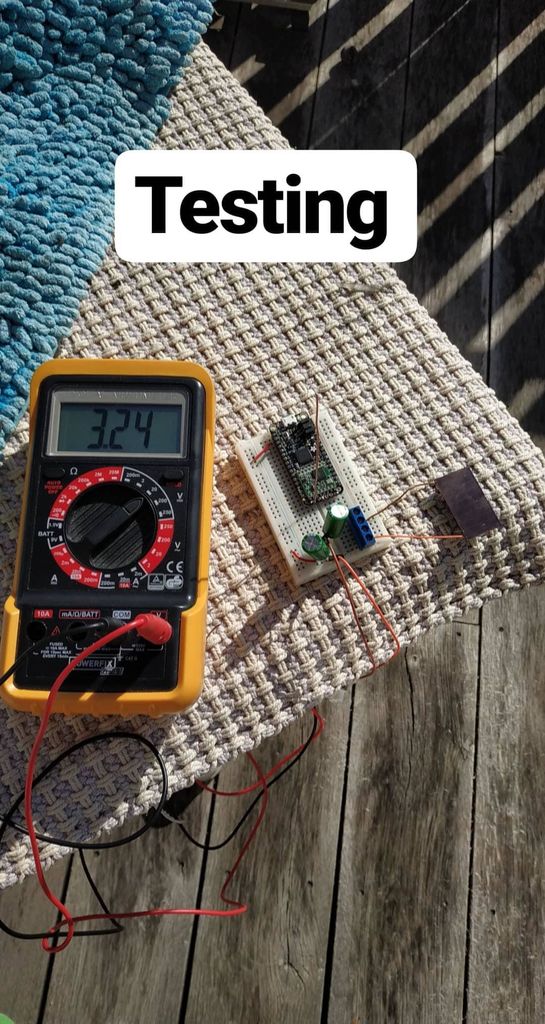
现在这应该是项目中最长的部分。测试。在各种条件下进行测试。在极端高温,压力和强光(或在太阳外面)模仿那里的条件。这应该至少花费一周时间,因此在跟踪器行为方面不会出现意外。但这是一个理想的世界,我们没有那段时间,因为追踪器是为比赛而建的。我们做了一些最后一分钟的修改(字面意思是发布前40分钟)所以我们不知道会发生什么。这不太好。但是你知道,我们仍然赢得了比赛。
你可能需要在外面做这个部分,因为太阳没有在里面照射,因为LoRa在你的办公室里没有最好的接收。
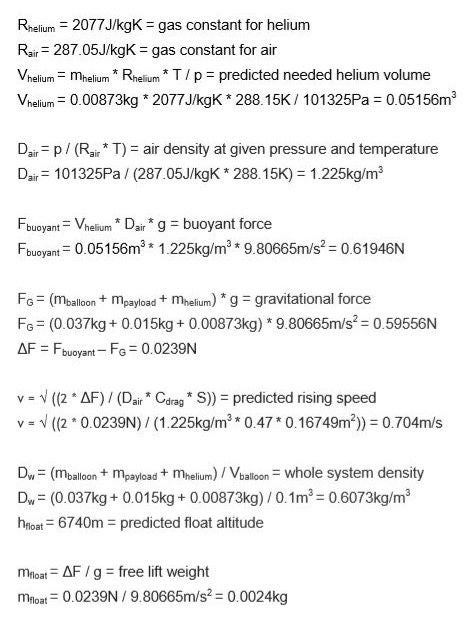
第12步:一些时髦的公式

Picoballoons非常敏感。你不能只用氦气填充它们并启动它们。他们真的不喜欢那样。让我解释。如果浮力太低,气球就不会上升(显然)。但是,这就是问题,如果浮力过高,气球飞得太高,气球上的力就会太大,它会弹出并落在地上。这就是你真正想要进行这些计算的主要原因。
如果你对物理学有所了解,那么理解上面的公式应该没有问题。您需要在公式中输入一些变量。这包括:填充气体常数,热力学温度,压力,探针质量和球囊质量。如果您按照本教程使用相同的气球(Qualatex microfoil 36“)和相同的填充气体(氦气),实际上唯一不同的是探针的质量。
这些公式应该给出你:填充气球所需的氦气量,气球上升的速度,气球飞行的高度以及自由升力的重量。这些都是非常有用的值。上升的速度很重要所以气球没有碰到障碍物,因为它太慢了,知道气球飞得多高真的很好。但最重要的可能是自由升力。当你在步骤14中填充气球时需要自由升力。
感谢TomasTT7提供有关公式的帮助。请查看他的博客。
第13步:风险
所以,你的跟踪工作。你已经工作了两个月的那块狗屎真的有效!祝贺。
那么让我们回顾一下你的探究孩子在a中遇到的风险ir:
1)没有足够的阳光照射太阳能电池板。超级电容器将耗尽。探针将停止工作。
2)探头将超出范围,不会收到任何数据。
3)强阵风会破坏探头。
4)探头将通过在上升和下雨期间的风暴会使电路短路。
5)太阳能电池板上会形成冰涂层。超级电容器将耗尽。探头将停止工作。
6)部分探头会在机械应力下断裂。
7)部分探头在极端高温和高压条件下会断裂。
8)气球和空气之间会形成静电,形成火花,这会损坏探头。
9)探头会受到雷击。
10)探测器将被飞机击中。
11)探测器将被一只鸟击中。
12)外星人将劫持你的探测器。特别是如果气球将在51区域之上,就会发生。
步骤14:启动!
所以,就是这样。这是D日,你将推出你心爱的picoballoon。了解地形和所有可能的障碍总是好的。此外,您必须不断监测天气(主要是风速和风向)。这样,您可以最大限度地减少100欧元的设备和2个月的时间撞到树上或墙上的可能性。那太可悲了。
在气球中插入一根管子。用尼龙将气球绑在重物上。把重物放在一个秤上。重置比例。将管道的另一端固定在氦气罐上。开始慢慢打开阀门。您现在应该在比例尺上看到负数。现在是时候使用您在步骤12中计算的自由升程值。当负数达到气球质量+自由升力时关闭阀门。在我的情况下,它是15克+ 2.4克,所以我在秤上准确地关闭阀门-17.4克。拆下管道。气球是自密封的,应自动密封。解开重物并用探头更换。您现在已准备好发布。
只需观看视频即可查看所有详细信息。
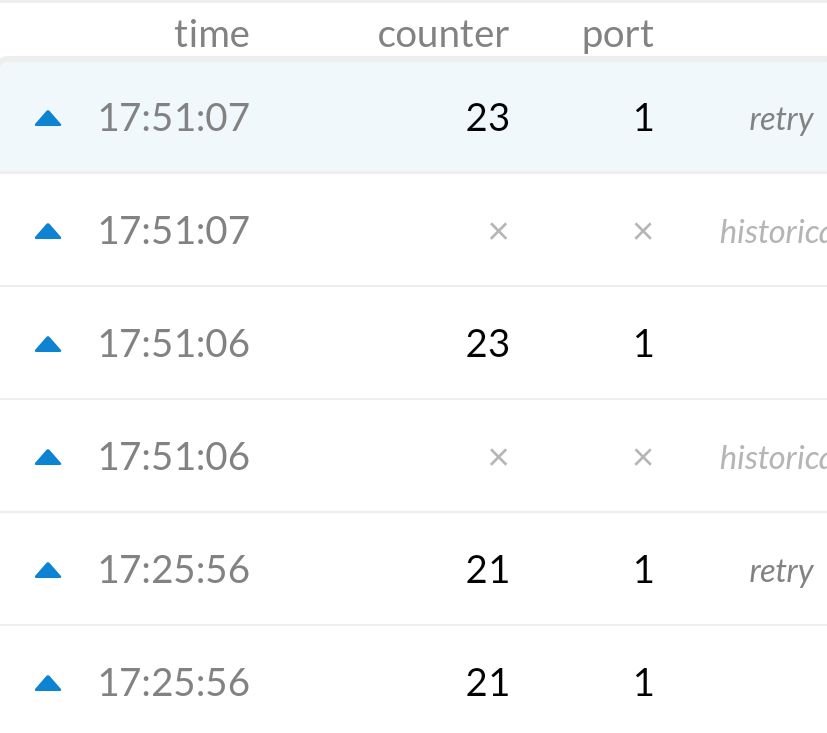
步骤15:接收数据
哦,我记得发射后的感觉。压力,挫折,激素很多。它会起作用吗?我们的工作会毫无价值吗?我们只是花了那么多钱在一些不起作用的东西上吗?这些是我们在发布后问自己的问题。
幸运的是,探测器在发布后约20分钟响应。然后我们每10分钟收到一个数据包。我们在格林威治标准时间17:51:09失去了与探测器的联系。它可能会更好,但它仍然很好。
第16步:进一步计划
这是我们迄今为止最困难的项目之一。并非一切都很完美,但没关系,它总是那样。它仍然非常成功。跟踪器完美无瑕地工作。它可能已经做了很长时间但是没关系。而且,我们在Picoballoon比赛中获得第二名。现在你可能会说在与17人的比赛中排名第二并不是那么成功但请记住这是一场成人工程/建筑比赛。我们14岁。我们与之竞争的是成年人,他们具有工程学,甚至可能具有航空航天背景,并且拥有更多的经验。所以,总的来说,我会说这是一个巨大的成功。我们得到200欧元,这大约是我们费用的两倍。
- 相关推荐
- 热点推荐
- 跟踪器
-
FBI秘密跟踪器是什么2020-04-23 2427
-
精选电子制作图解66例_门宏编著2015-07-30 1183
-
创意小夜灯制作图解2018-09-07 15760
-
发电机模型制作图解2018-09-17 13404
-
微型太阳能跟踪器DIY图解2019-08-19 14628
-
无线月相跟踪器的制作教程2019-09-04 3551
-
技术资料库 -- 官方白皮书 : 高海拔的电特性2021-10-29 2081
-
如何使用电子纸、ESP8266制作COVID 19实时数据跟踪器2022-10-27 649
-
如何为自行车制作车速表/跟踪器2022-10-28 1359
-
低温与高海拔对控制器和逆变器影响2023-03-24 8111
-
高海拔低气压用什么电容器?2023-08-24 3697
-
什么是电压跟踪器?2023-12-07 2088
-
串口屏在高海拔区的技术设计2024-03-13 2393
-
高海拔环境下,保证电源滤波器正常性能的方式2024-12-31 1045
-
高海拔厂区运维!移相整流变压器性能衰减咋应对?2026-03-25 289
全部0条评论

快来发表一下你的评论吧 !
