

垂直黑胶唱片机的制作教程
电子说
描述
第1步:设计概述
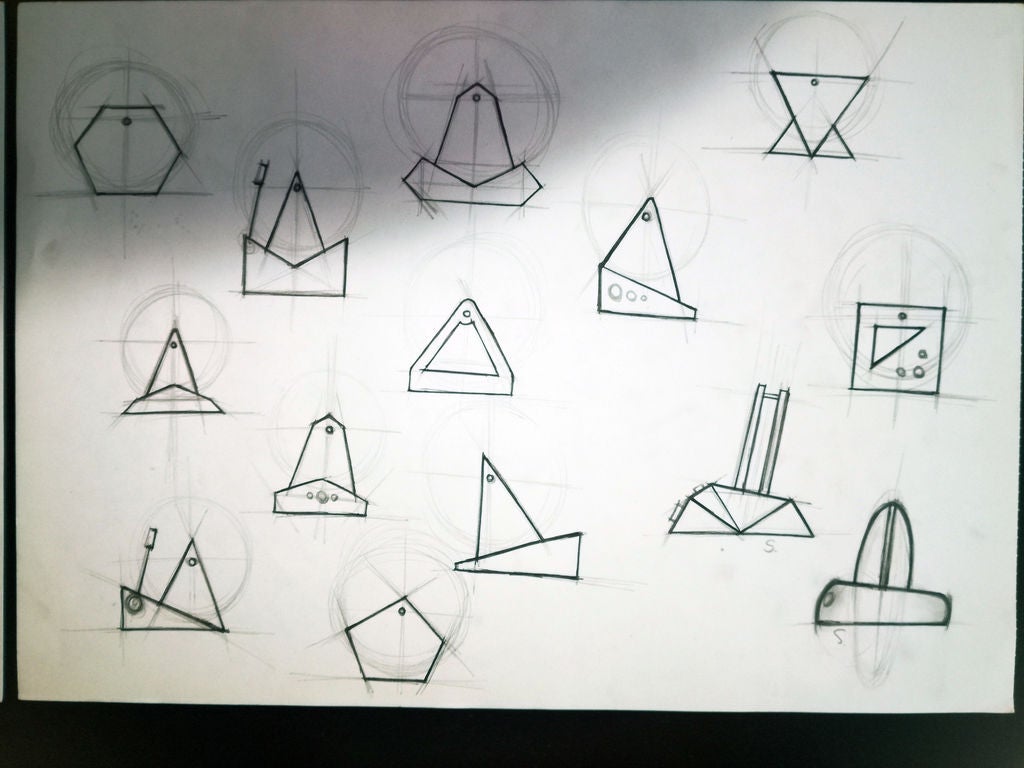



我通过绘制主要形状的2D正面和侧面视图开始设计转盘。由于我想垂直显示乙烯基并且能够在不取出的情况下进行转动,因此该设计具有旋转功能。乙烯基可以在垂直轴上旋转180度。我不想使用多个音调或复杂的设计。这个概念是唱臂移动让乙烯基转向。我选择了一个简单的三角形来继续设计。
我制作了纸张1:1比例模型。这样我就可以确定粗略的测量结果。第三张图显示了这个模型。主要形状由两个主要部分组成。底座,包含控制器和按钮以及上部。该上部可以在垂直轴上旋转并且将乙烯基保持在其中间。设计并非完全垂直。它向后倾斜5度。这样,未来的唱臂仍然可以通过重力对乙烯基施加一些压力。
下一步是确定需要哪些组件以及系统的总体布局。第三张图显示了此概述。我使用了二手唱盘的唱臂,一个坚固的AKAI模型。此外,直流电机也从旧的转盘中清除。
概述显示了一个旋转乙烯基的电机,一个用于转动记录的步进电机,以及一些控制设备和帮助自动化的组件。最终的原型还没有自动化。我将不得不花更多时间使用Arduino IDE进行编程。现在唱片旋转并播放音频,但是唱臂和翻转记录现在都是手动控制的。
因为我使用了一些从旧唱盘上撕下来的部件,所以这种设计并不适合。如果你想制作自己的,你必须能够制作自己的版本。其他硬件需要其他设计。能够创建自己的CAD文件非常重要。
第2步:3D CAD设计




一旦我了解了所需的功能和硬件,我开始在CAD中设计所有内容。由于我想挑战自己,我为3D打印机创建了很多自定义零件。设计紧凑,并配有组件。在装配中模拟电机之类的硬件很方便,以确保一切都适合。
我面临的主要挑战是降低从直流电机到驱动轴的转速。正如您在第二张图像上看到的那样,我通过创建两个缩减从2000减少到33.3 RPM。降低电机电压也有帮助。
我设计的所有部件都以STL格式提供在物品上:
STL型号
目前我只会使用Arduino/motorhield模块主动驱动直流电机。我的设计的未来版本将具有自动转向机制和自动唱臂。首先,在转向编写不同组件之前,我想要设计的核心。
第3步:3D打印部件,启动,绘画






由于使用塑料灯丝进行3D打印不能提供光滑美观的表面,因此完成明显的部件非常令人满意。这需要一些努力和耐心,但这是值得的。
在给木材填料进入之前,我用网格120打磨了我的外部部件。将填料平滑,让其干燥,打磨,打磨,打磨并再次进行。这取决于你正在寻找的完成。在涂上最终的黄色涂料之前,我将主要部件打磨到600格。我用一把小滚刷来获得漂亮的效果。由于黄色是浅色,我需要在它看起来很好之前涂上至少4层。
如果您的底漆是水性的,请务必使用水性漆。
第4步:硬件概述

A。防振脚由橡胶制成。 *结果B. 80毫米长12毫米直径的铜管。该管将用作底座中的垂直轴。
C. 1个轴承,3 mm内径,10 mm直径。 3个轴承,8 mm孔径,22 mm直径。 m8螺母和螺栓。
D.足够数量的m3螺栓和螺母。他们中的大多数需要一个像9毫米螺纹一样短的长度。
E.直流电机。无声电机是必须的。该电机最大运行速度为8V,转速为2000 RPM。*
F。 Nema 16步进电机。用于驱动乙烯基车削机构。任何具有一些下降扭矩的步进电机就足够了。步进电机配有GT2 20齿皮带轮,可将其连接到GT2皮带。
G.轴配有弹簧。该轴来自转盘的中心轴。*
H。 Tonearm组装。我从AKAI转盘打捞的唱臂有一个很好的曲线,这是我的设计所需要的。所有电线仍然连接在一起。当郁金香插入放大器时,它会产生声音。唱臂有一个相当新的墨盒。*
I。输入按钮。为了操作转盘,一些按钮派上用场。在我的设计中,我选择了两个按钮和一个用于模拟输入的电位器。
J. 280毫米GT2皮带和两条松紧带。这些部件用于驱动某些部件。一条橡皮带实际上是一条乐高腰带。类似这样的皮带经常用在胶带套中。
K。 Arduino配有adafruit motorhield V2并连接到drv8825步进驱动器。
L.电源。我使用12V电源,最大可提供1.5A电流。我的步进电机运行在1A左右,直流电机没有那么大的功率,所以这个小PSU就可以了。确保永远不要超过你的硬件。我的直流电机只通过编程的电机屏蔽电压达到6V左右。
* 从各种旧转盘中打捞的部件。
第5步:概述3D打印部件




A。基地。
B. B方B.
C A侧保持还原和直流电机旋转乙烯基。
D. Tonearm轴。唱臂铰接到这部分上下移动。
E. Tonearm轴安装。该部分将音臂轴连接到底座。它还允许唱臂在轴周围旋转。
F.步进电机安装。
G.侧面乙烯基支架。 A侧和B侧乙烯基支架均配有相互吸引的磁铁。黑胶唱片夹在这些之间。 A侧的支架是驱动的。
H.乙方乙烯基支架。
I.耦合器。该部分将侧面夹在底座上并可绕其轴线转动。
J.电机安装。这部分推动直流电机将其连接到A侧。
K。大齿轮。降低从电机到驱动轴的转速。
L.大滑轮和小齿轮。这是驱动减少的一部分。它有一个22毫米直径的轴承,可以自由旋转。
M.齿形滑轮。该滑轮通过10 m3螺栓嵌件将联轴器和侧面夹紧在底座上。它由步进电机的GT2皮带驱动。这部分可以转动乙烯基侧面。
N.Side B轴盖。盖住B侧的轴端。
O。连接电位器的前旋钮。
P.侧面A轴盖。盖住A侧的轴端。
我在设计中总共使用了14个钕磁铁,以便将零件粘在一起。确保你的杆子正确!它们必须与总体设计的水平轴和垂直轴的方向相同。我的磁铁尺寸为8 x 2 mm。
步骤6:准备基地







我从垂直转盘的底座开始。首先粘在磁铁上。任何塑料造型胶都可以。确保它们的极点在垂直轴上朝着相同的方向前进。
其次,将所有必需的m3螺母推到位。如果我们稍后安装唱臂,这些将提供功能。
步进电机可以推入到位并松散地用螺栓固定在底座的下侧和上侧。
放置底座前面的按钮。我的按钮尚未正常工作,所以如果我的设计到达下一阶段,我会将它们取出并焊接一些电线。
步骤7:准备Tonearm





唱臂是转盘中的关键部件。这“读取”产生声音的记录。因此,了解它很重要。以下链接提供了关于针如何在乙烯基上行为以及如何正确调整它的清晰信息:
如何平衡唱臂
针头可能只在乙烯基上施加几克力,否则两者都可能受损。平衡一个几乎垂直定位的唱臂是很难的,但要注意它!大多数音调都是水平放置的。因为我的唱臂有一个弯曲,我调整了音臂的背面,使其具有一个角度,以在垂直轴上提供更好的质心。
再一次,注意恰好调整唱臂。
步骤8:准备A侧,直流电机驱动侧













一旦完成,A面驱动黑胶唱片。这是一个重要的组件,如果所有零件都有适当的尺寸并且不相互磨削,它会有所帮助。
首先,必须选择合适的金属轴并将其放入A侧的上轴承中在这个轴上放置一个带有第一个较小橡胶带的小皮带轮。在将轴固定到位之前,确保将带安装在滑轮周围。这是你必须对自己拥有的部分创造性的一部分。确保它用一些润滑脂顺利运行并且轴直线运行。在播放唱片时,摆动轴可能会出现问题。
之后,安装磁铁。这次,当你将A侧放在底座上时,确保他们想要坚持底座。
安装m3螺母并将直流电机固定到位。根据您的电机,您可能需要在电机和侧面组件之间安装一些橡胶材料。这可能会减少电机可能产生的振动声。
将两个M8螺栓与相应的齿轮固定到位。确保大齿轮下方的皮带轮抓住并与连接到上轴的橡胶皮带连接。将最终皮带安装到直流电机上。
步骤9:组装轴和直流电机导线







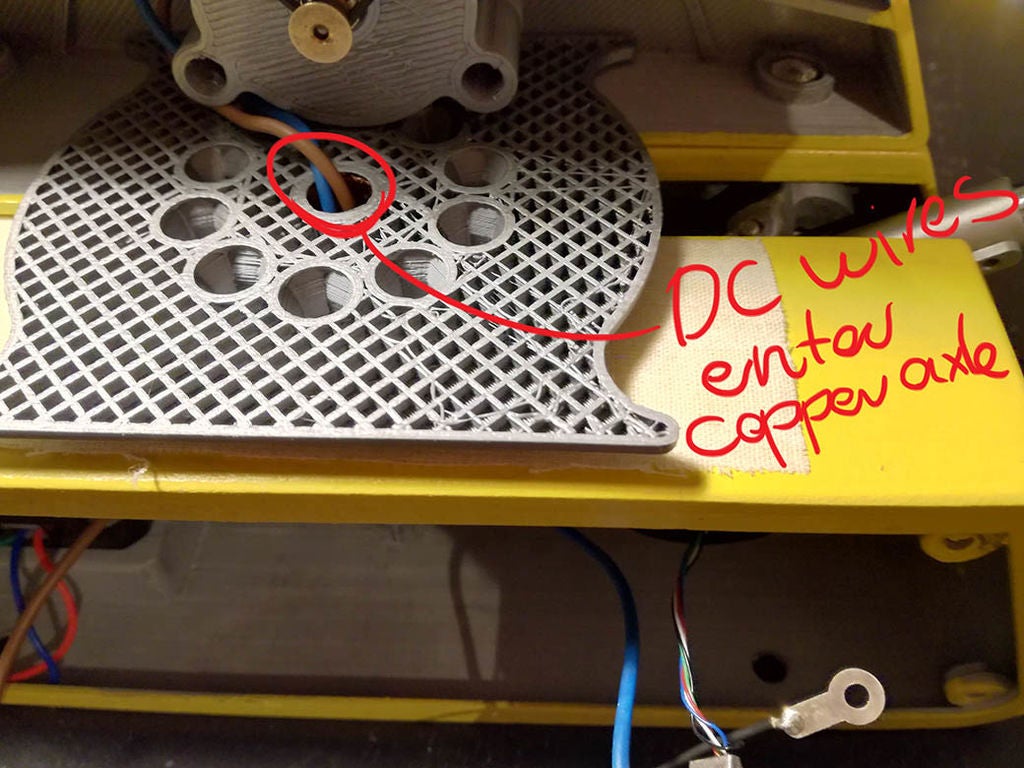


A直管铜管可用于在底座中形成旋转轴。它通过灰色耦合器部件为两个连接侧创建一个枢轴点。我在两侧钻了两个孔,为直流电机线供电。
在运行电线之前,必须将大的齿形滑轮放在铜管上。 GT2皮带安装在皮带轮周围。
可能需要一些摆弄,但从连接到这些电线的底部拉一根细金属线会有所帮助。
一切就绪后,耦合器可从顶部装入10 m3螺母。不要推翻组件,否则它们会脱落。
步骤10:组装B侧



B方的组装非常简单。轴上装有一个弹簧,可以向前推动乙烯基支架B.
确保磁铁的内侧吸引相对的乙烯基支架A.
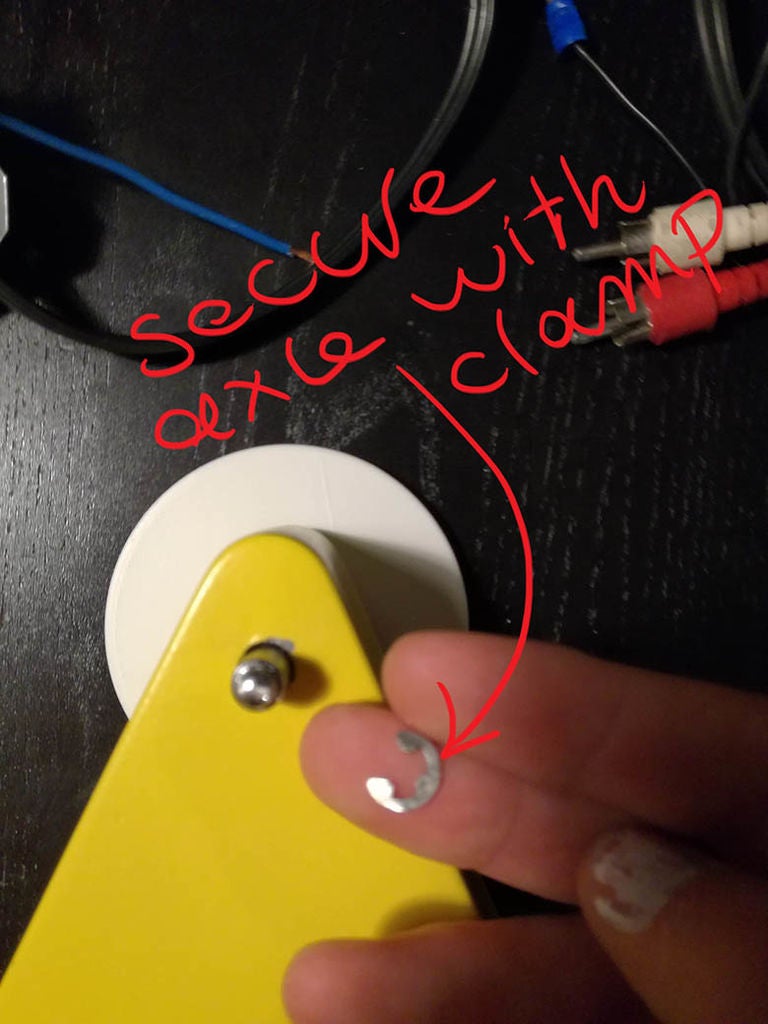
一旦轴固定好一个夹子,我用后面的按钮将后部按钮粘在轴上(!和仅限轴!)用一些可以将金属粘到塑料上的双组分胶水。
检查活动部件是否可以自由运行并打磨和/或或必要时加油。
步骤11:将B面放在底座上并保护所有东西




一旦两面都完成,B侧可以包含在主组件中。
拧紧GT2皮带,固定步进电机并在大滑轮底部插入m3螺栓。一旦将这些螺栓固定在连接器部件的螺母中,一切都应牢固固定,但侧面应能绕铜轴轴线旋转。
步骤12:完成A侧


通过安装乙烯基支架完成A侧。同样,该部分保持磁铁,磁极必须面向相同的方向。这部分不需要粘在一起。它应该紧贴在驱动轴上。
步骤13:准备电子设备


因为我是我仍然想知道如何在这个设计中以最好的方式使用Arduino,我不会详细介绍可能需要的组件。按钮仍然没有接线,没有反馈回路。这是近期的一些工作。但是,我用来驱动直流电机的唯一部件是Adafruit电机屏蔽V2。他们的网站上有一个非常精细的信息页面:
Motorshield V2
我还将DRV8825驱动板连接到arduino以控制步进电机。这些是以安全和精确的方式控制步进器的理想选择。可以使用电动机屏蔽来控制步进电机,但这取决于步进电机吸取的电流。我自己炸掉了一半的电机挡板,因为我的步进电机吸了太多电流。始终研究您的硬件需求及其能力。
步进驱动器的下降信息可在以下位置找到:
Polulu drv8825驱动程序
步骤14:组装最终部件







要完成,请将一些橡胶脚连接到底座。阻尼来自其表面的振动可以帮助减少音频信号中的噪音。
确保唱臂可以在基座内部自由移动,并消除任何不必要的布线。
清理完所有东西后,将后部螺栓固定在底座上。如果需要,将电源线和音频线穿过底部或创建一个新孔。
安装最后的部件以掩盖任何眼疮并完成!
第15步:以奇特的方式享受你!


- 相关推荐
-
最全的唱片公司介绍1.doc2012-11-11 0
-
薄膜唱片改制电磁筒2009-08-17 629
-
您见过“飞起来”的黑胶唱片么?它不仅炫酷而且还很实用2016-10-14 1758
-
黑胶唱片情怀:摩范影音电器系列走心测评2018-09-06 1919
-
雅马哈将推新款黑胶唱片机 可通过WiFi传送到支持MusicCast技术的音箱上进行播放2018-10-08 4974
-
黑胶唱片还有用么2019-01-08 6697
-
废旧光驱如何制作唱片机2019-05-28 7099
-
索尼推出新款黑胶唱片机 售价2490元2019-07-11 3648
-
怎样使用黑胶唱片制作时钟2019-11-08 2694
-
复古风潮再起,黑胶唱片凭什么在流媒体下“逆流而上”?2023-08-24 678
-
Phillips-Medisize携手U-Turn Audio提高新一代黑胶唱片机性能2023-12-22 717
全部0条评论

快来发表一下你的评论吧 !
