

基于ESP32的小型机器人制作图解
电子说
描述
步骤1:构建机箱
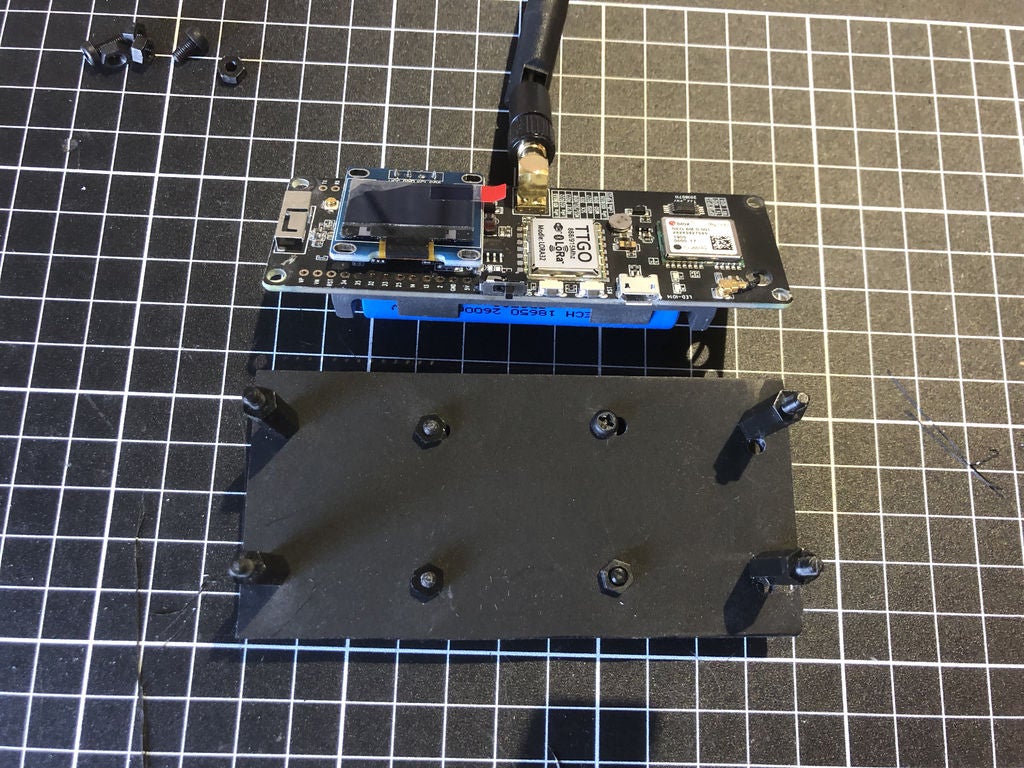
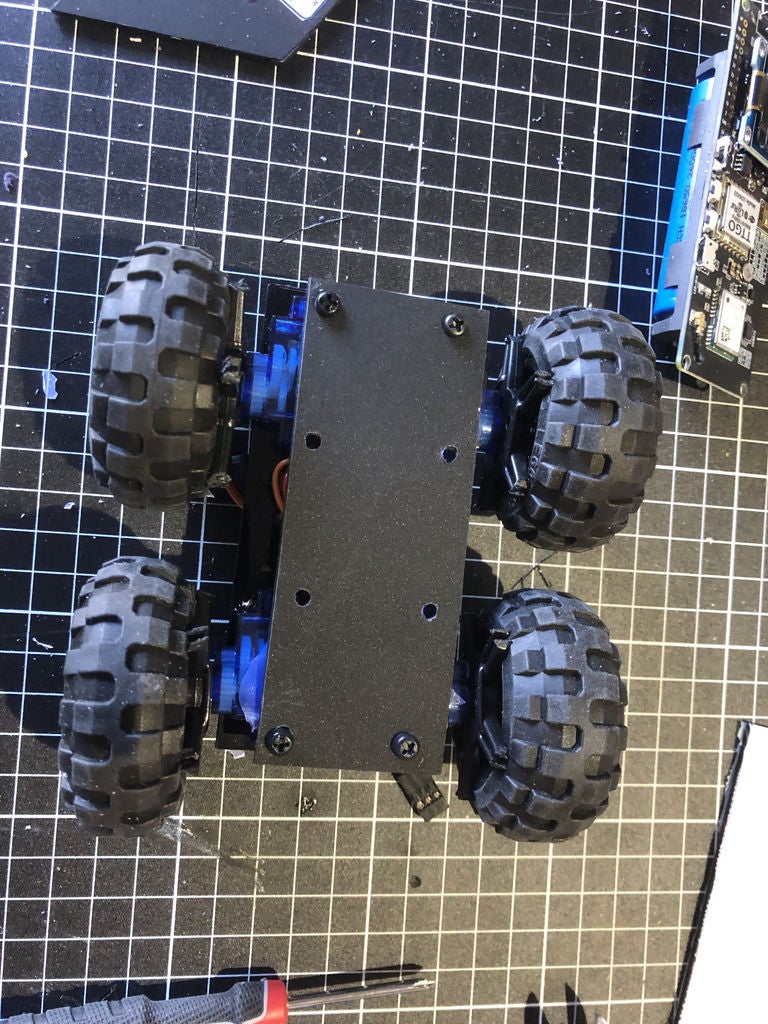
我想要一个真正的基本底盘,任何身体都可以使用一些有机玻璃或塑料,甚至可以使用旧的塑料饭盒或外卖。
我将一块有机玻璃切成一块比ESP32板宽一点,但长度大致相同,然后我标记在哪里我想添加4个孔来安装ESP32使用电路板支架。
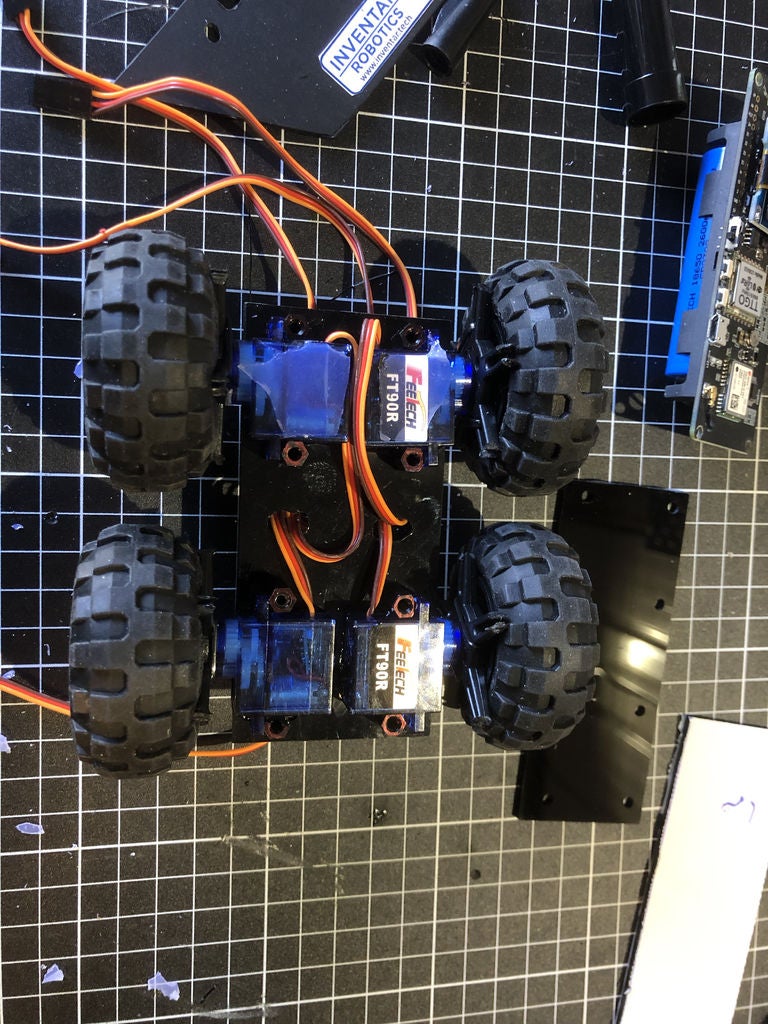
安装舵机
我定位舵机以便它们所有都是以相同的方式定向,所以当接线时,它们将驱动相同的方向。我用了一些塑料胶把它们放在适当的位置并添加了一些支架来帮助它们固定。
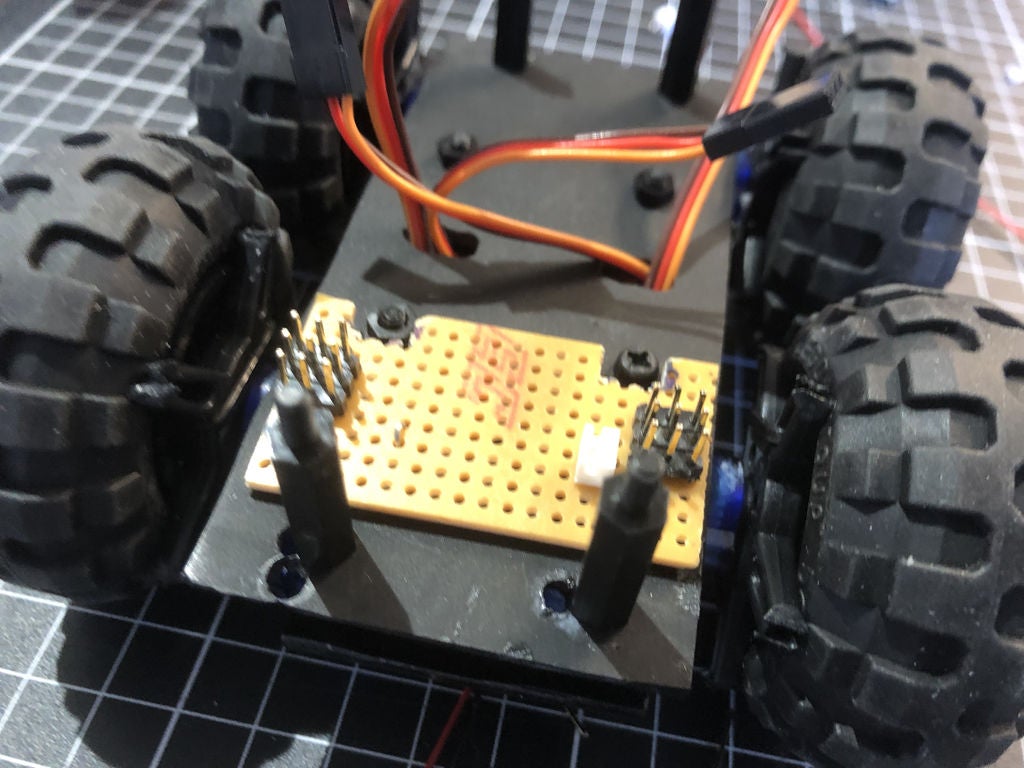
我钻了一些孔,让伺服电线穿过机箱底部,这样它们就可以插入我用过的小型veroboard,稍后我将详细介绍。
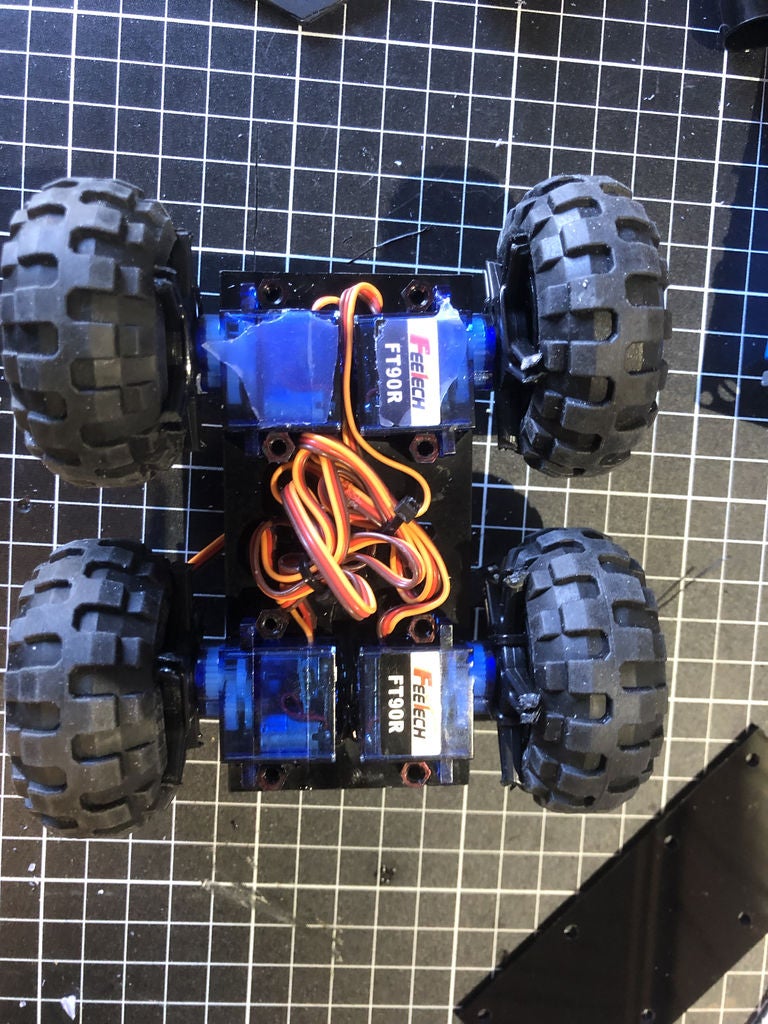
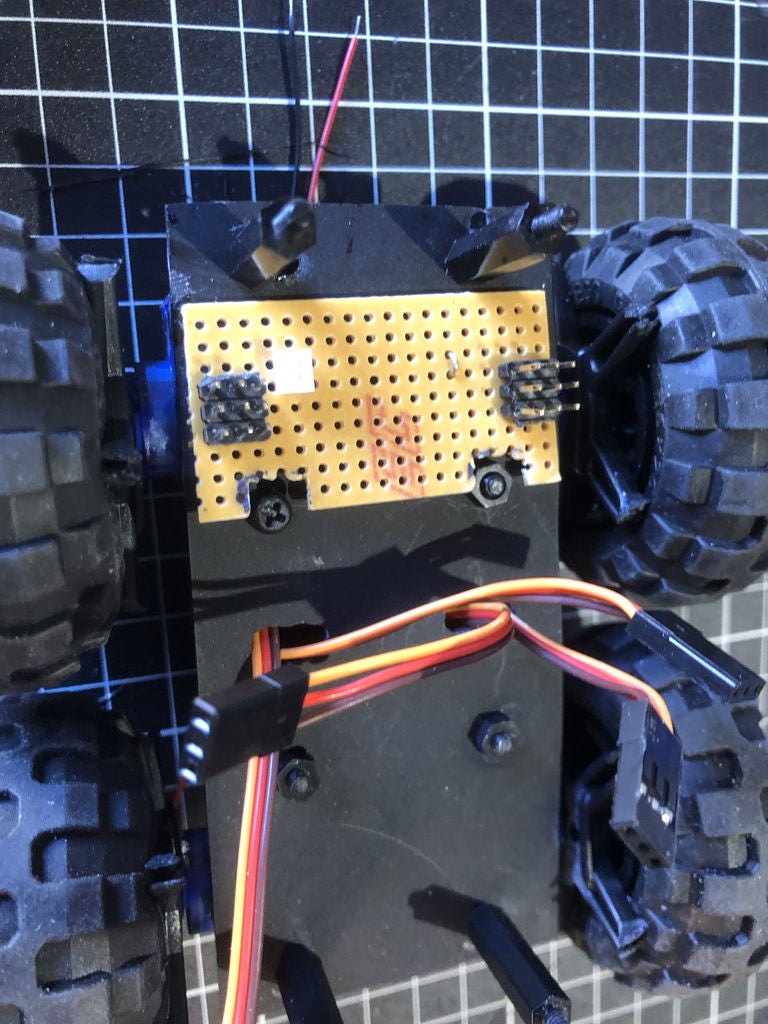
我尽可能地捆绑了伺服多余的接线,并使用了几根小电缆扎带将它们固定到位。
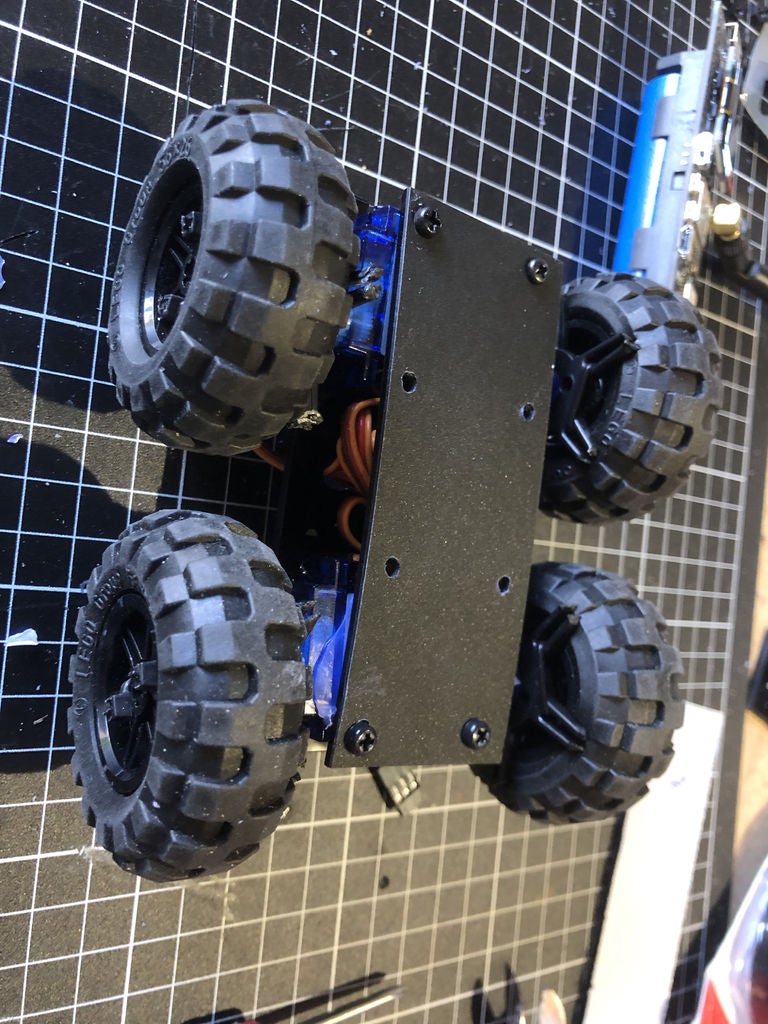
覆盖所有接头
作为最后一步,我用一块与我剪下的第一块相同尺寸的有机玻璃覆盖了它。我为额外的支架钻了孔,并添加了支架螺钉,将它们固定到位。
我很惊讶这个曾经在一起的重量是多少,比我前一周制作的马达轻得多。
第二步:制作一个自定义的Veroboard
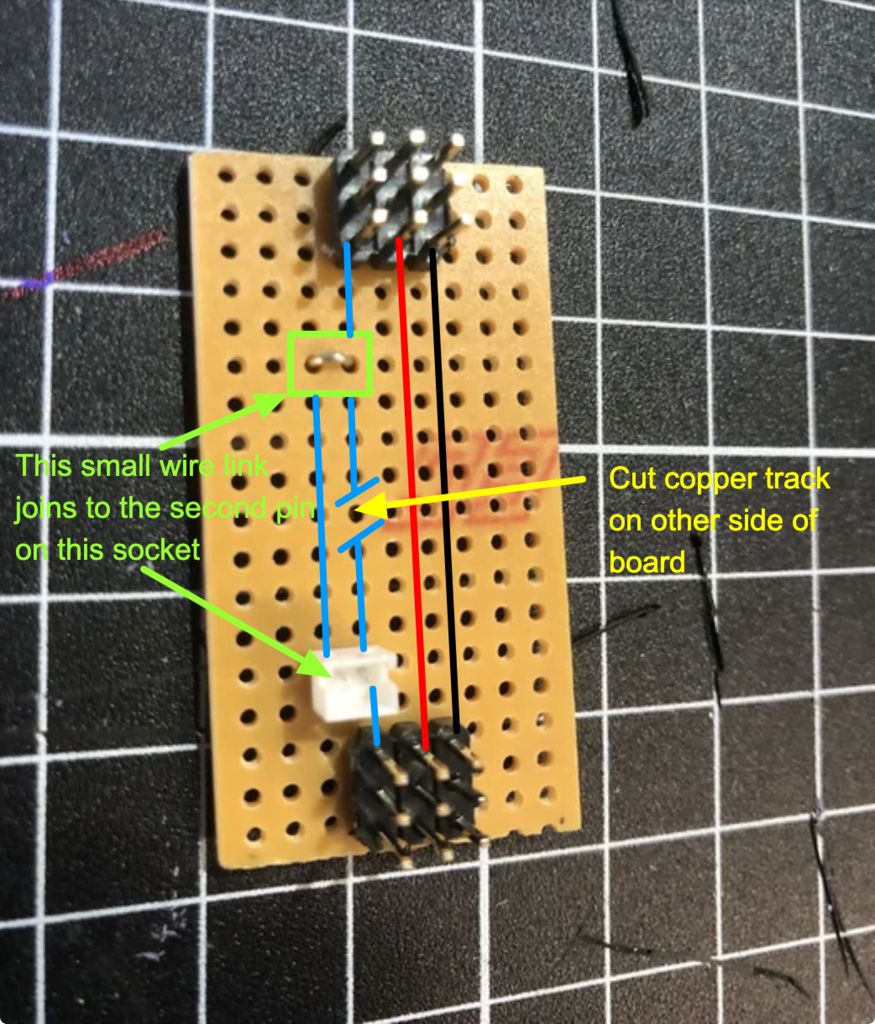
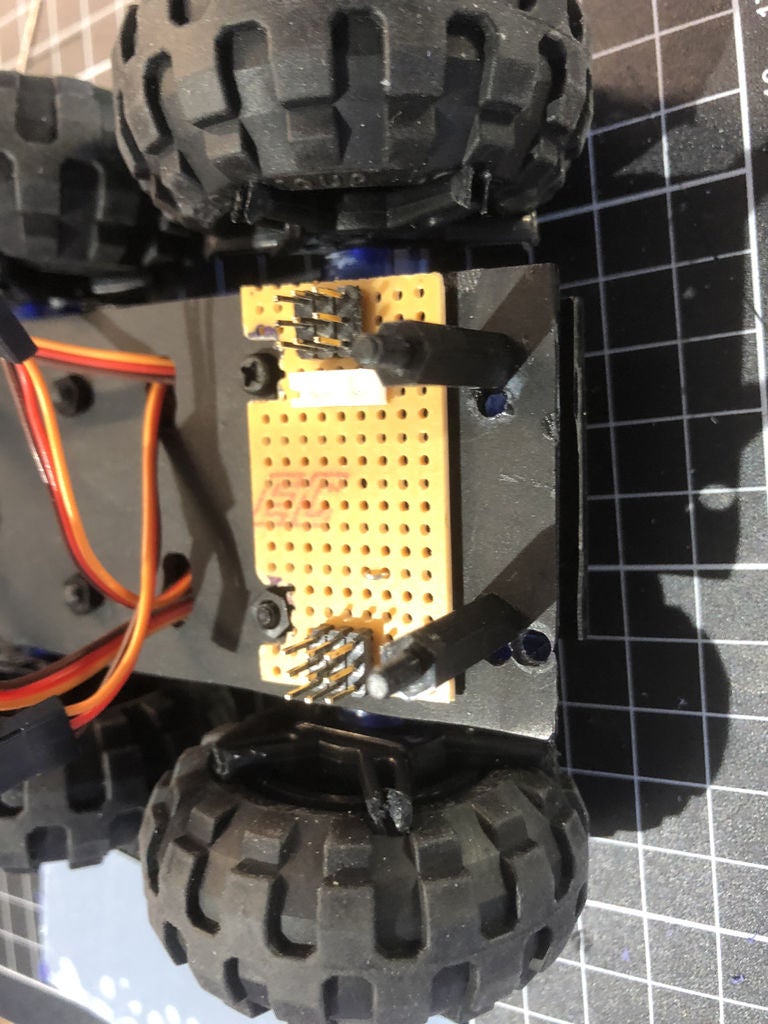
我想制作一块小板,让我插上我的ESP32进入电路板并在需要时易于拆卸。所以我在照片中创建了它,我添加了一些标题针,所以我可以插入Servos,然后插入一个neopixel strip。
我还添加了2个小jst插槽,我有一些所以我可以使用这些用于来自ESP32的电源,也用于提供伺服信号连接。
我切断了电路板下面的一条铜轨,使每个伺服的信号引脚不同,然后我用一个小的电线连接器,通过电线将其移动一个轨道,这样两个第一个引脚就会连接一侧或另一个。
因为车辆的每一侧都有两个伺服电机,所以我用电路板来将两个伺服器彼此连接起来,这样我就可以在每一侧用单个伺服连接运行左侧伺服器或右侧伺服器。我在这里所做的就是将每一侧的连接连接在一起,以简化所需的接线数量。
我允许Vcc和GND连接通过铜轨道一直连接到veroboard,但是我切断信号线,这样我就可以控制我想独立驱动的不同侧面。
步骤3:布线
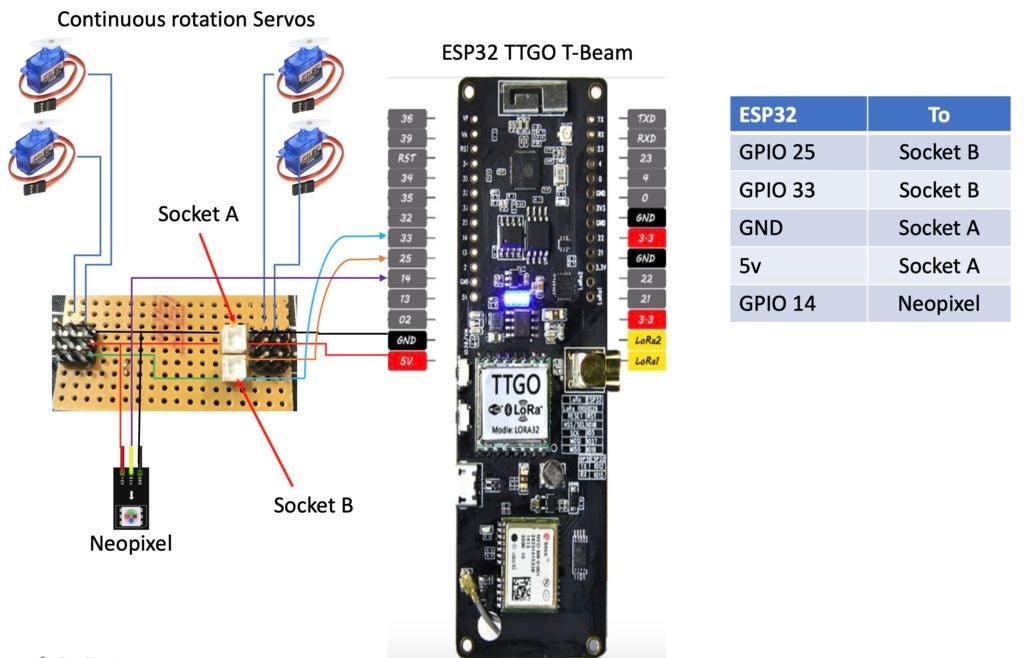
这里的接线图显示了连接以及如何尽可能少地连接Servos和Neopixel条。
步骤4:全部放在一起

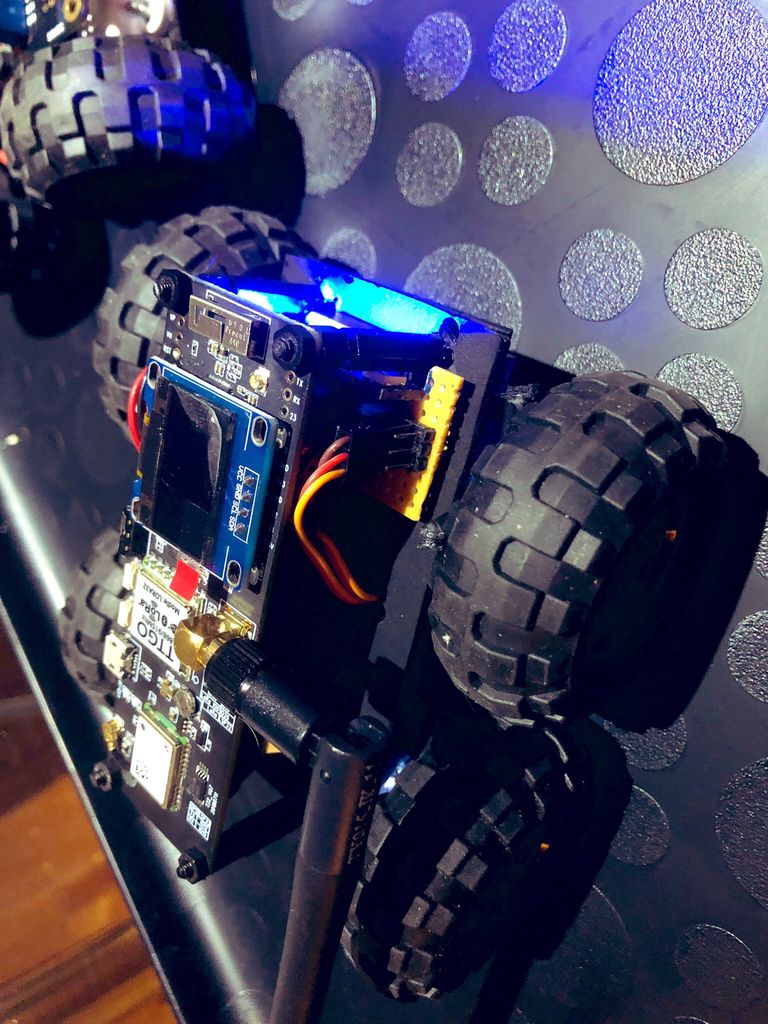
一旦我把所有东西都连接起来,我就安装了自定义的veroboard,并将ESP32添加到底盘上,它们都很合适。
布线大多是隐藏和隐藏的,可以很容易地添加侧面,并且顶部可以完全封闭ESP32。
步骤5:控制和测试


我想要一些简单的控件,发现在网站https://r andomnerdtutorials.com/他们提供了一个很好的例子,说明如何运行网络服务器并显示控件,这样你就可以让机器人车开车了。我修改了示例以使用伺服器而不是电机,并添加了使用neopixel条带的代码,以及在Oled屏幕上显示我需要连接的IP地址,以便我可以控制机器人。
第6步:ESP32的代码
在这里,我附上了可以根据自己的目的进行修改的代码,完全归功于randomnerdtutorials,它构成了我拥有的基础这里。我强烈建议购买他们在ESP32上的课程,它会带你使用ESP32的许多复杂功能,以及一些非常好的示例项目。
-
开源项目!用ESP32做一个可爱的无用机器人2024-09-03 2441
-
【开源资料】使用ESP32C3超简单制作迷你四足机器人2023-09-21 9020
-
基于嵌入式视觉的移动式自重构微小型机器人2010-06-07 671
-
TMS320LF2407在小型机器人控制系统中的应用2016-05-06 715
-
创意小夜灯制作图解2018-09-07 15746
-
发电机模型制作图解2018-09-17 13400
-
适用于小型机器人的廉价电机制作2019-08-07 4295
-
ABB全球首发IRB 1300小型机器人2020-09-21 6274
-
PCB ESP32基础机器人2022-08-03 887
-
Arduino ESP32多合一机器人开源2022-10-21 1990
-
使用Websockets创建自己的ESP32机器人汽车2022-11-04 512
-
如何制作ESP32 CAM板监控机器人汽车2023-06-29 698
-
如何用电子元件和ESP32-CAM制作AI机器人2023-07-04 959
-
由电话控制的小型机器人2023-07-10 477
-
构建ESP32 MicroPython Wifi的机器人汽车2023-07-12 680
全部0条评论

快来发表一下你的评论吧 !
