

绘图机器人DIY图解
电子说
描述
第1步:所需材料


就像我以前的项目一样,除了控制器电机和车轮之外,大部分的东西都是垃圾。
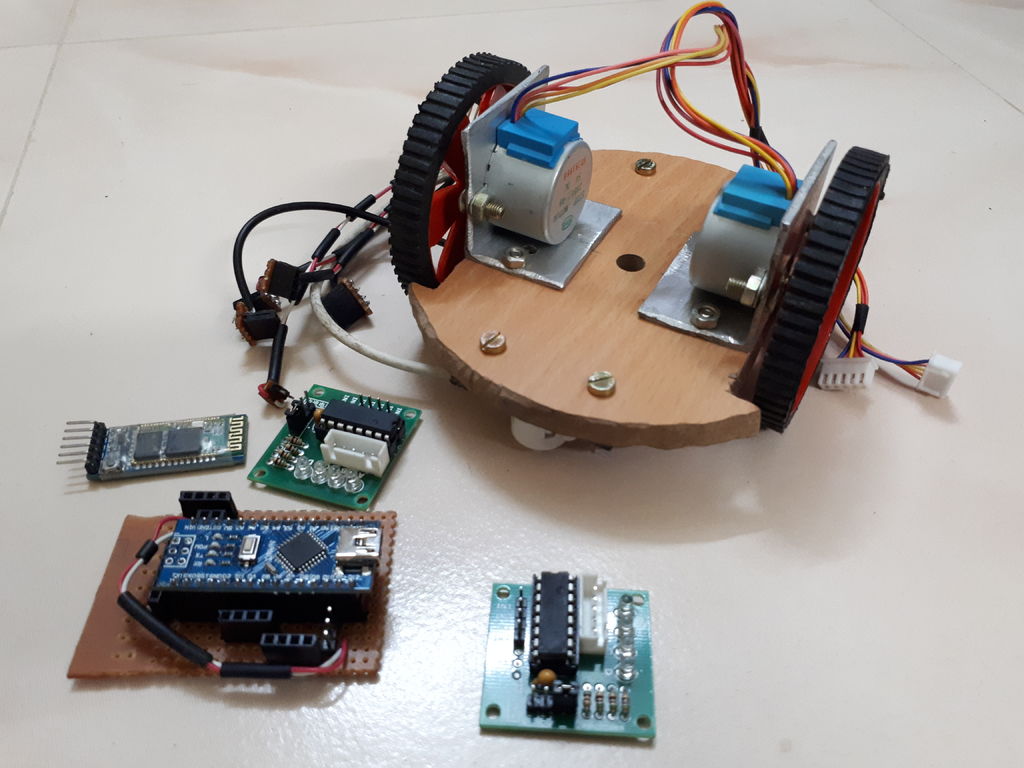
所需材料
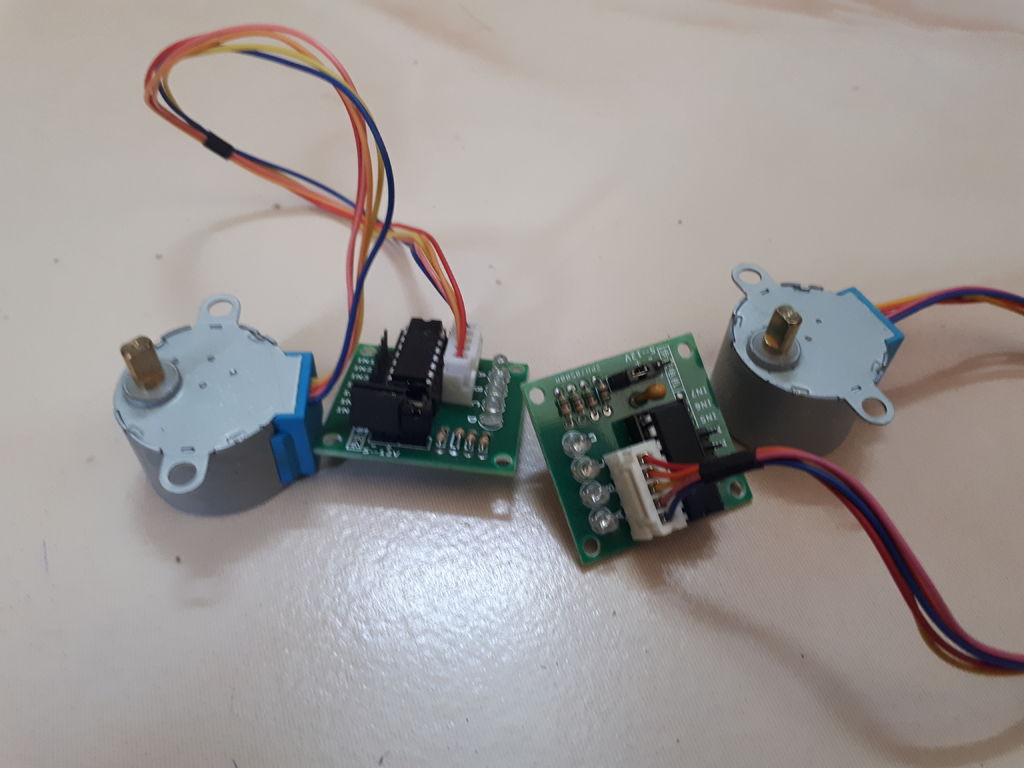
1)带有uln2003驱动器的28byj-48步进电机 - 2号
2)Arduino Nano - 1No 。
3)Tower pro servo sg90 - 1No。
4)HC-05蓝牙模块。
5)步进电机轮 - 2号
6)脚轮 - 2号。
7)素描笔
8)螺丝和螺母。
9)电容器470微法。
除了上述所有垃圾之外
9)胶合板12 CM X 12 CM。
10)铝喂料废物。
11)CD盒。
12)旧塑料齿轮。
使用的软件
1)Arduino IDE。
2)Visual Studio 10.
使用的工具
1)钻孔机。
2)焊接离子。
3)钢锯片。
4)螺丝刀。
第2步:构建视频
单视频中的完整构建请参阅视频或详细了解步骤。
步骤3:底盘构造和车轮固定

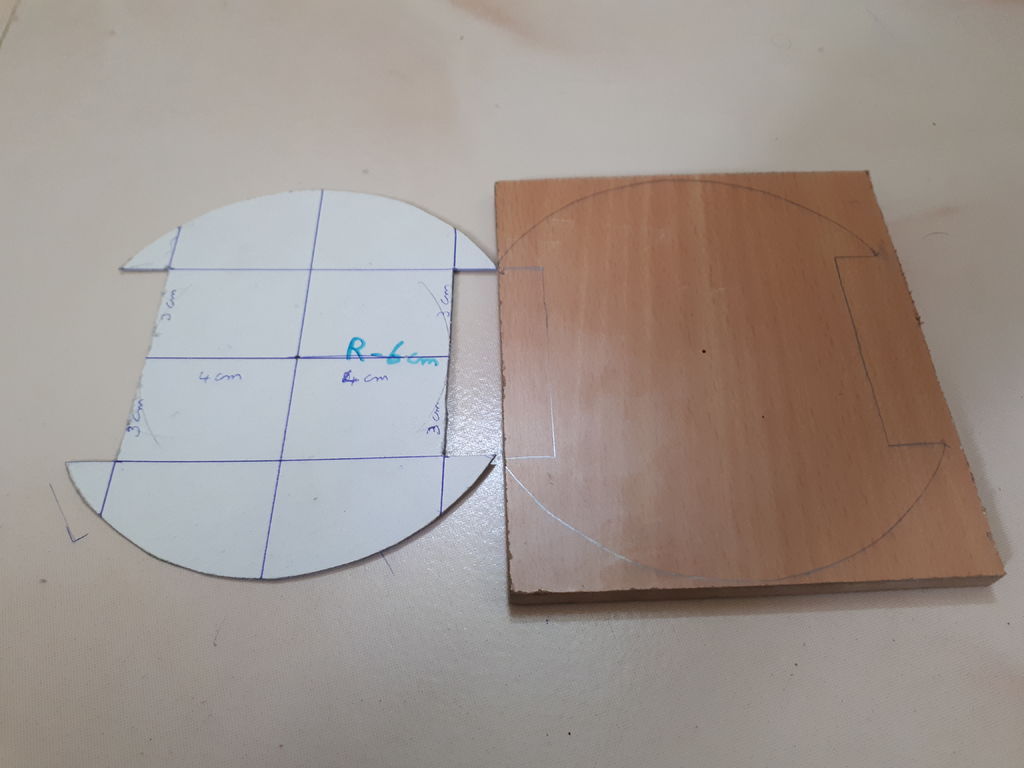








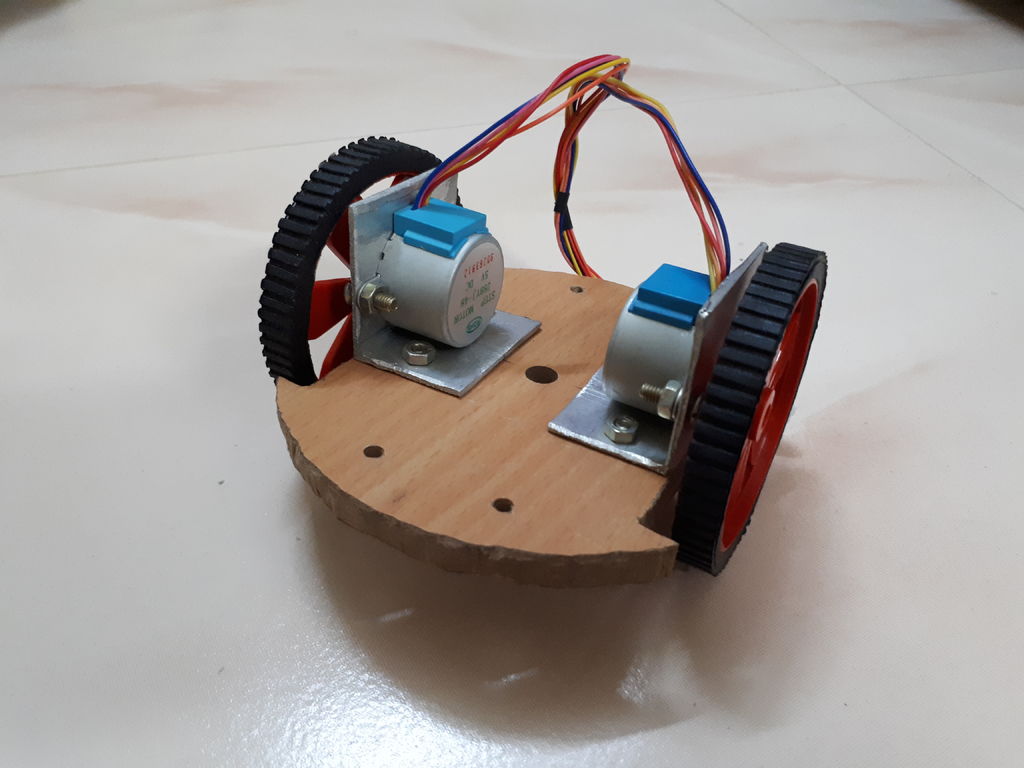

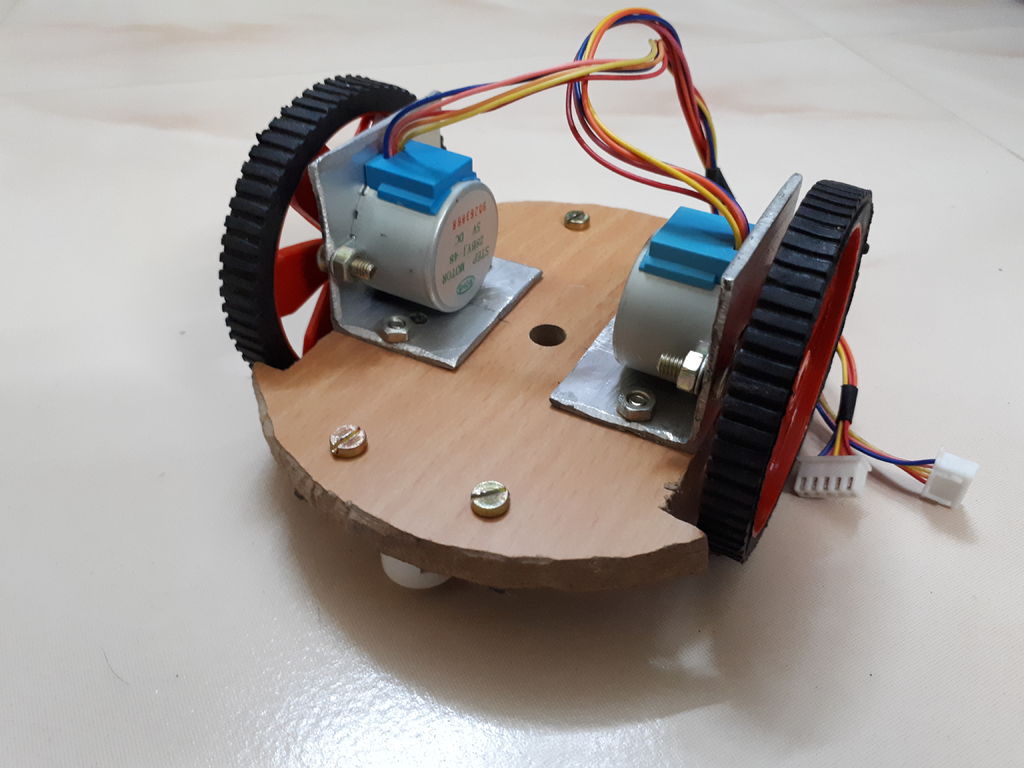
图像是自我解释的,我仍在叙述一些单词
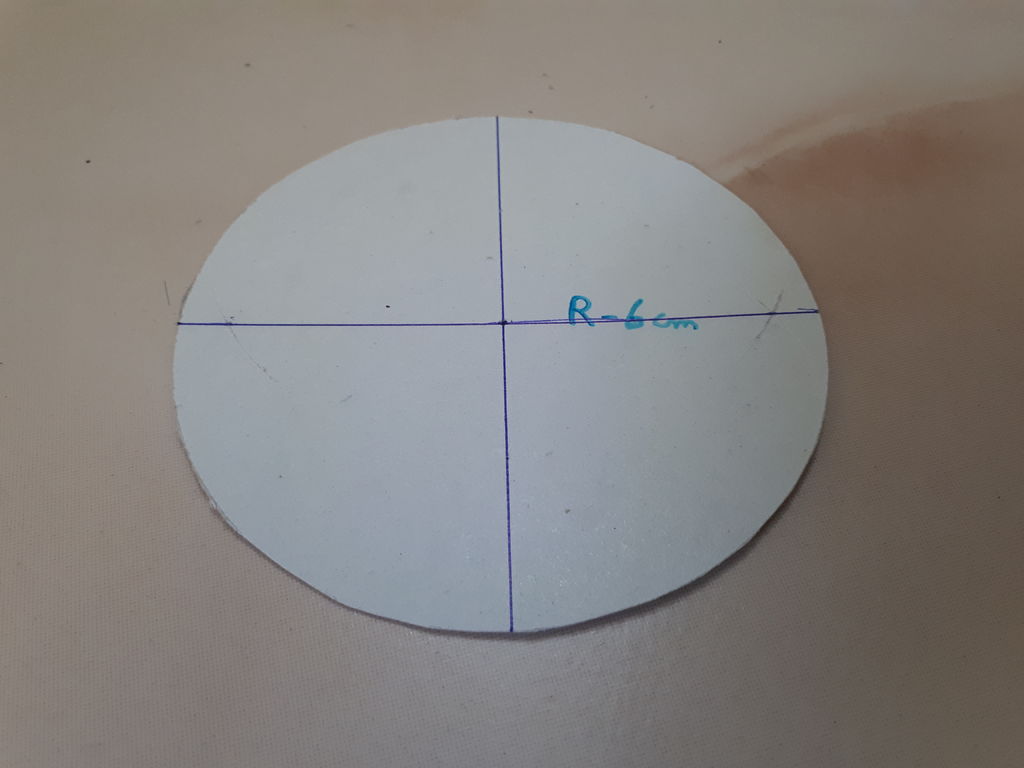
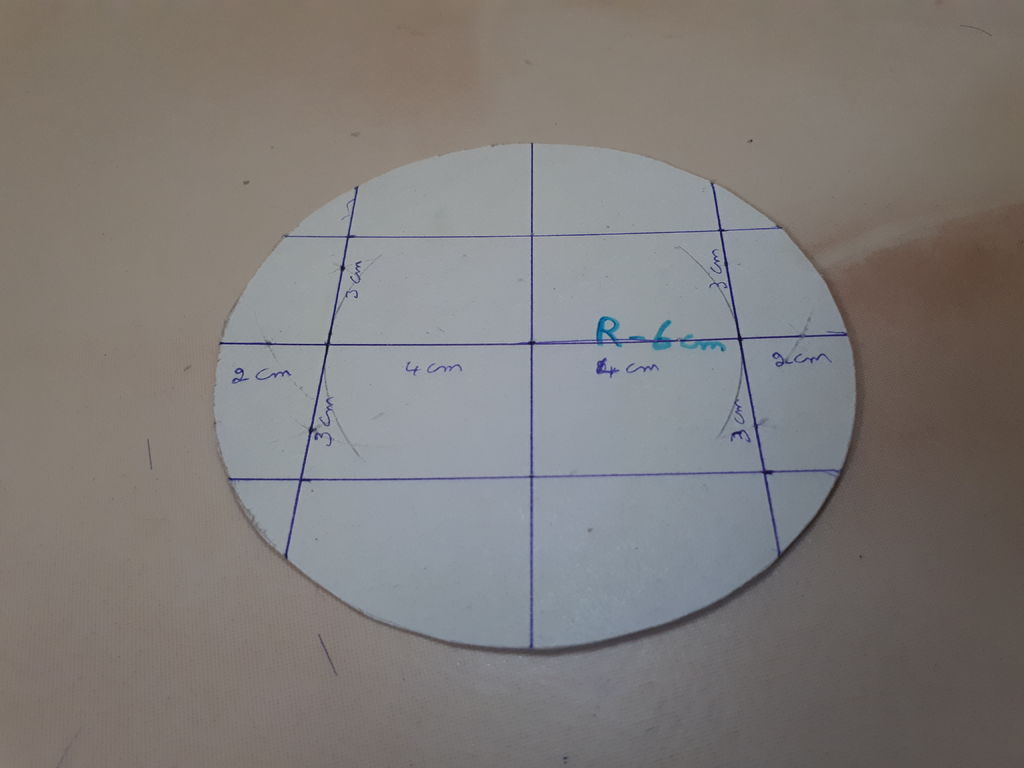
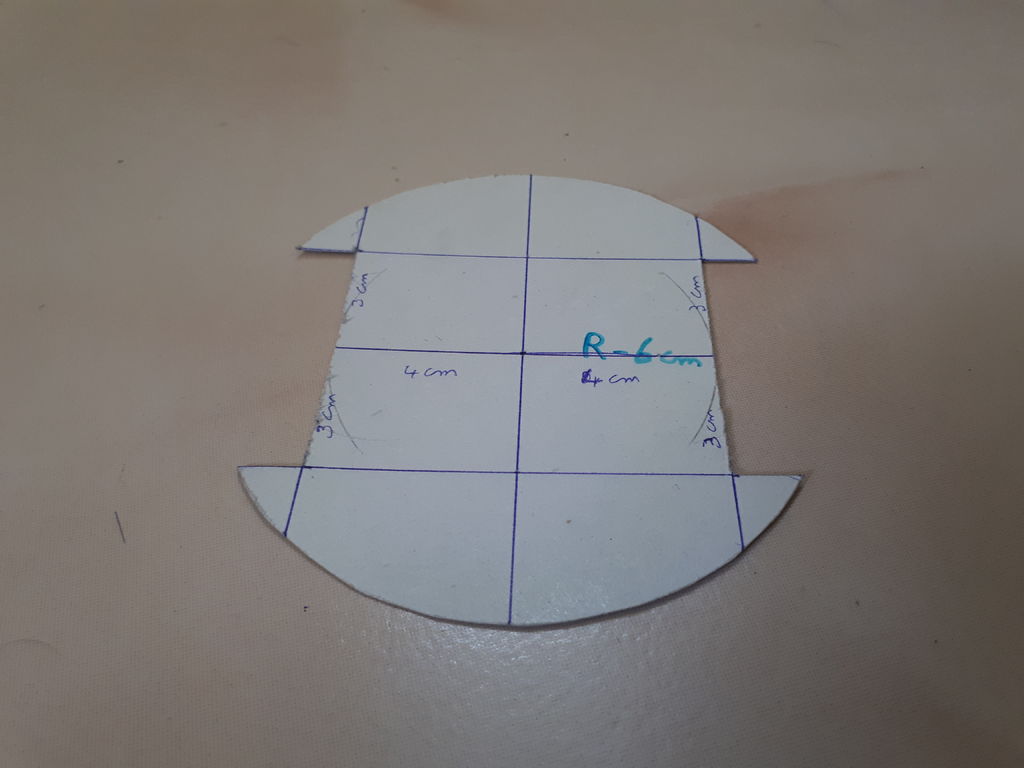
1)它是一个非常小的机器人,只有6厘米半径(直径12厘米)。首先在纸上绘制圆圈并标记轮子部分并剪切纸张。
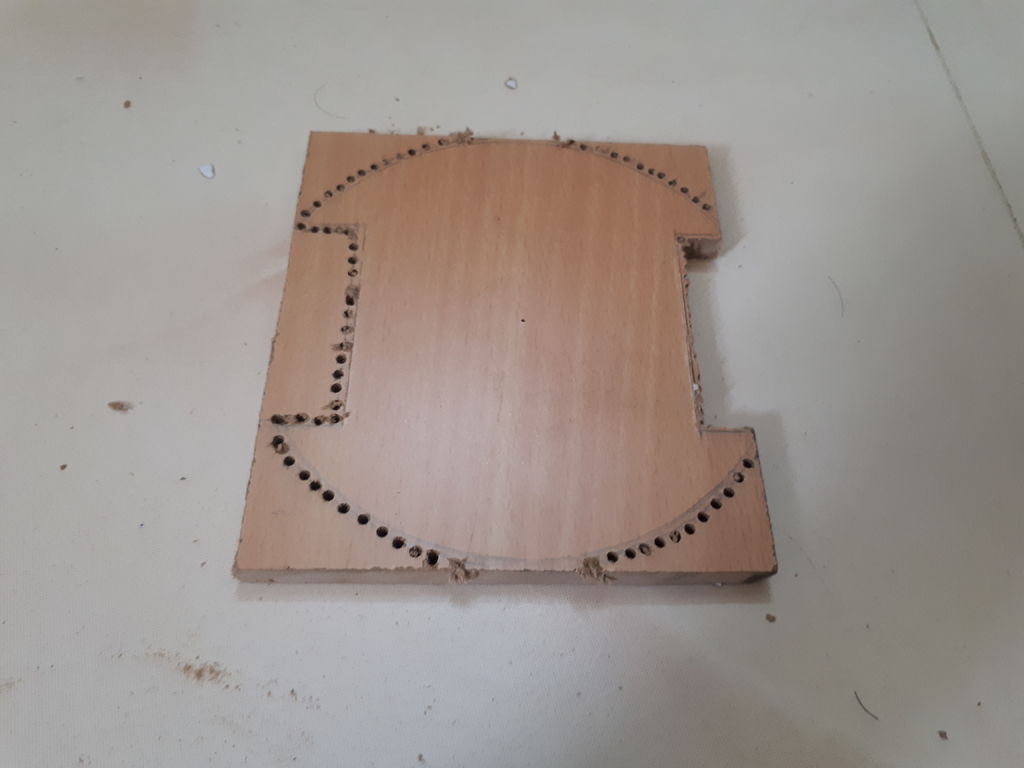
2)将纸张放在胶合板上并绘制底盘轮廓。由于我没有木材切割机,我用相等的空间钻出外线并去掉多余的碎片。
3)用刀子雕刻两侧并使其抛光。
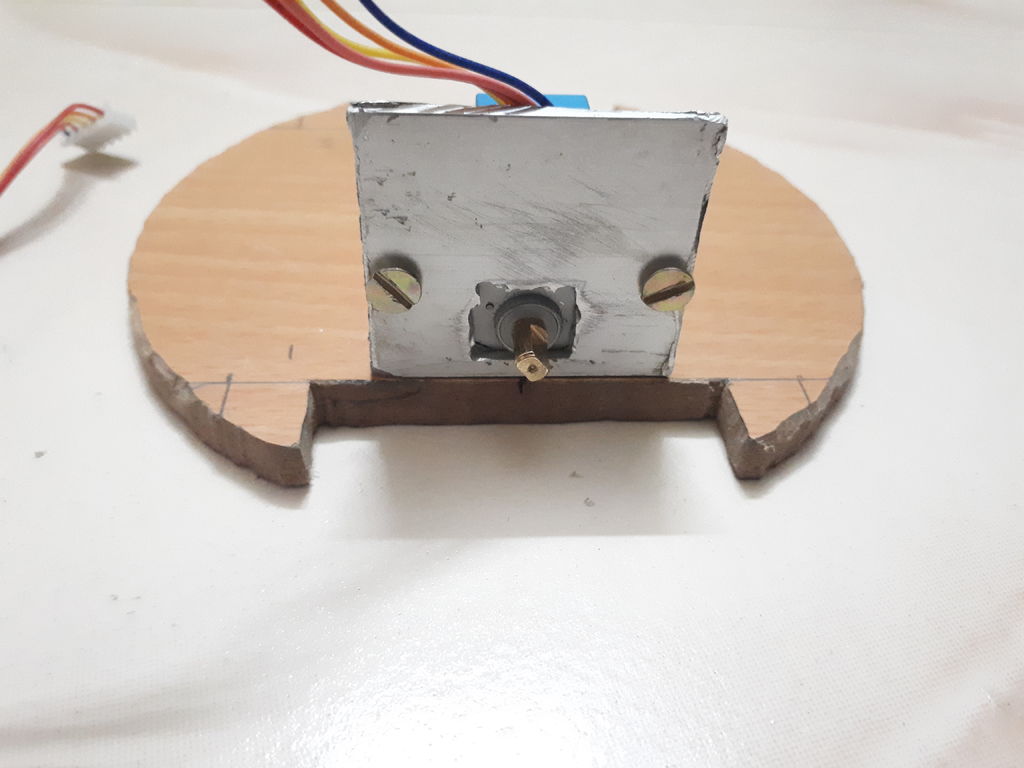
4)现在使用黑客锯将方形铝进料管切割成L形。
5)标记L形进料孔,以适合步进电机。再次放置孔并切割铝片(需要花费更多时间,因为用手工作时铝的重量较轻)。
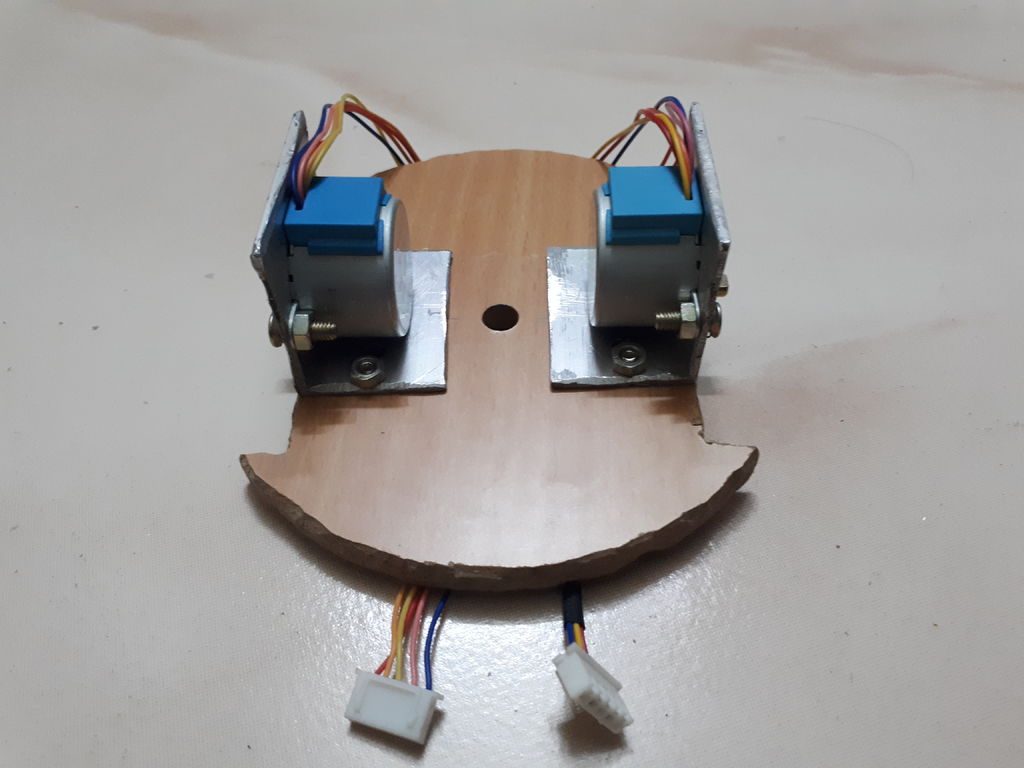
6)现在使用螺丝和L形铝合金喂入游戏木底座坚果。现在将步进电机拧入机箱中。
7)为脚轮做一个底座并用底盘固定。
8)在正确的中心放一个10mm的孔底盘供将来使用。
注意: - 步骤非常简单,但所有人都希望处于适当的尺寸和正确的位置,即使小的mm变化也会使绘图发生很大的变化。
步骤4:电路规划
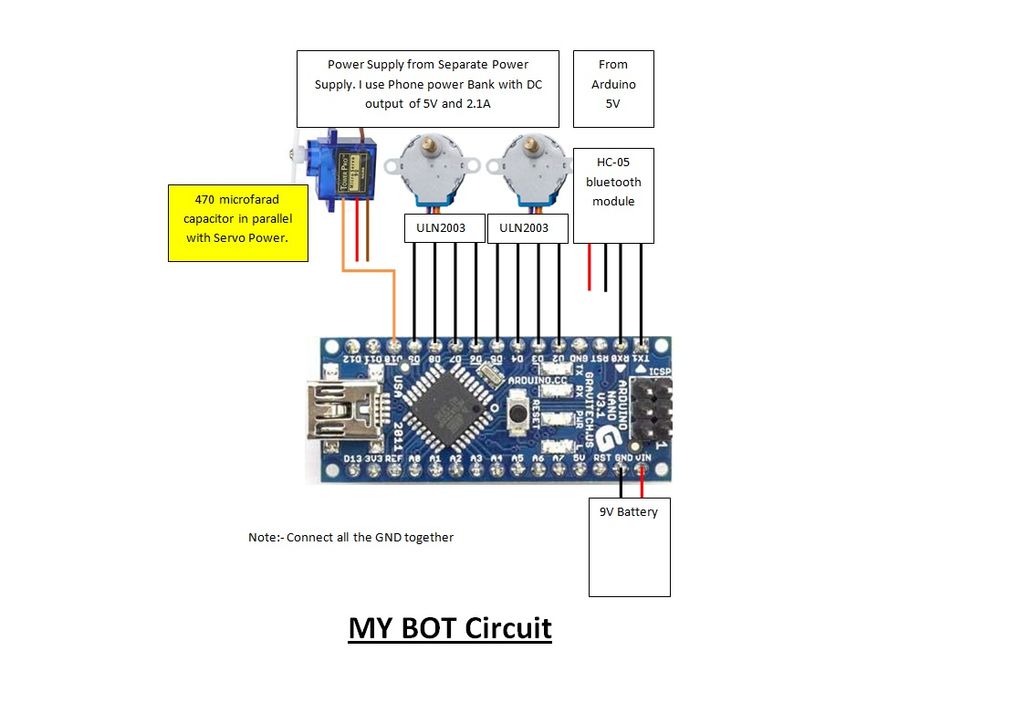
以上是电路图
1)使用Arduino TX和RX与HC05蓝牙通信。请记住,当程序上传HC05必须删除其他明智的我们无法上传程序。
2)步进器的用户数字引脚(2,3,4,5)和(6,7,8,9)发动机。通过ULN2003驱动器将引脚连接到步进电机。
3)将伺服电机连接到数字引脚10.
4)步进电机和伺服电机分开供电。我使用的是具有5V 2.1A输出的移动电源。
5)用于Arduino的9V电池和用于HC05模块的Arduino 5V电源。
6)使用并联的470微法拉电容伺服电源停止伺服闪烁。
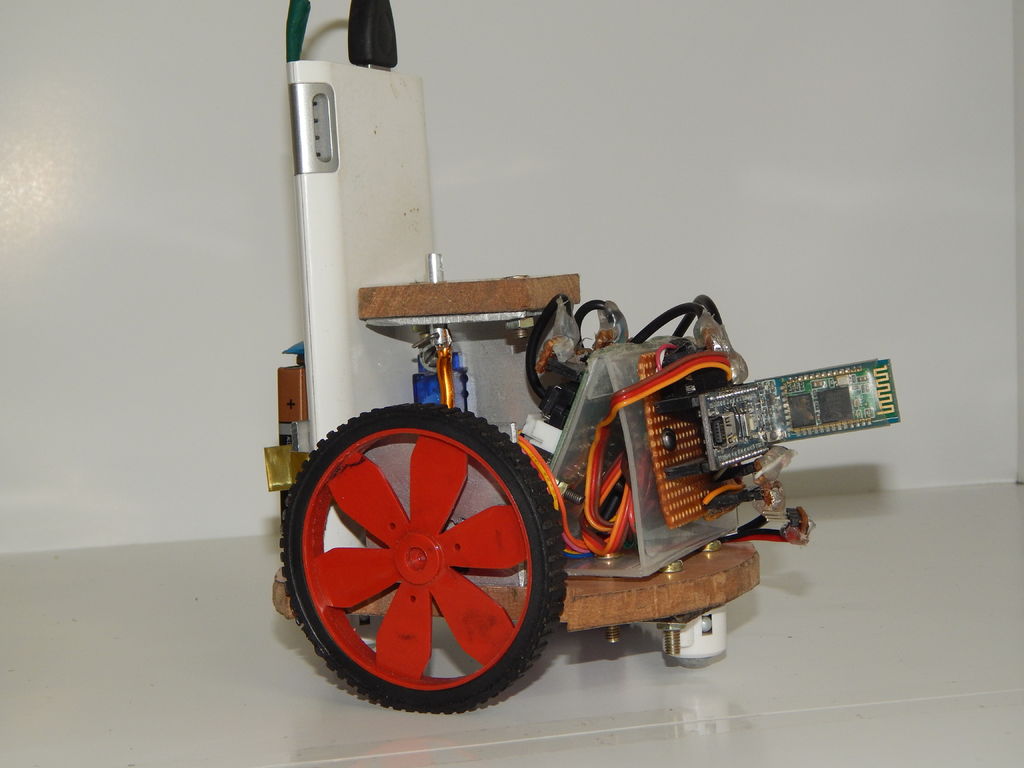
步骤5:电路完成
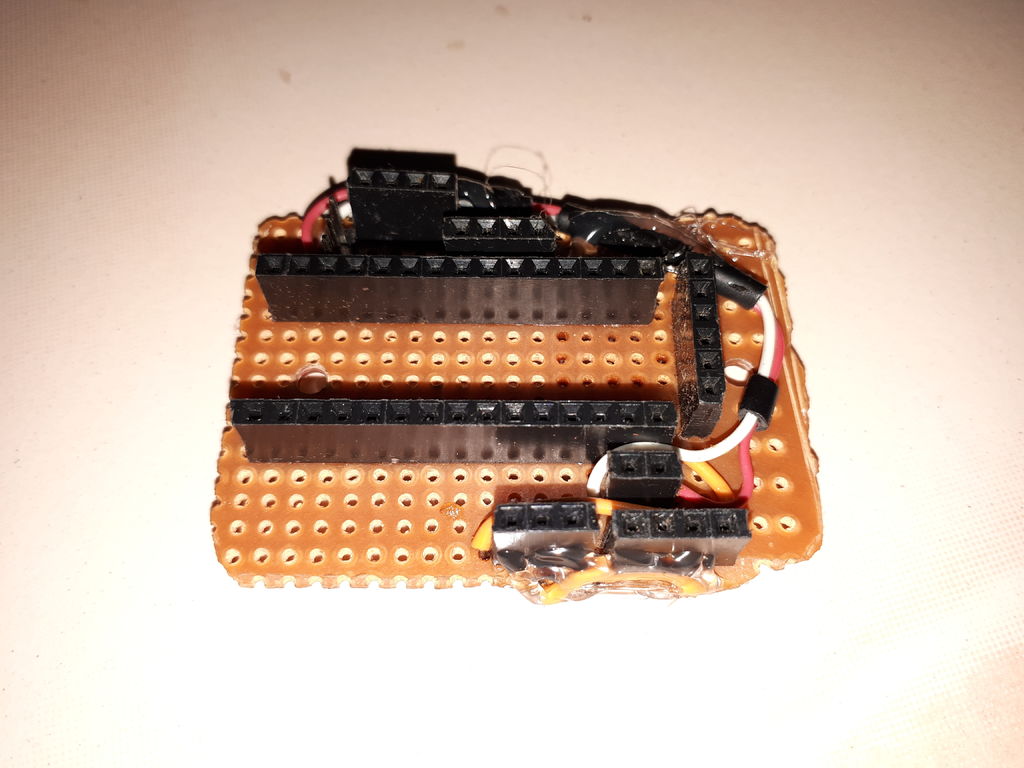
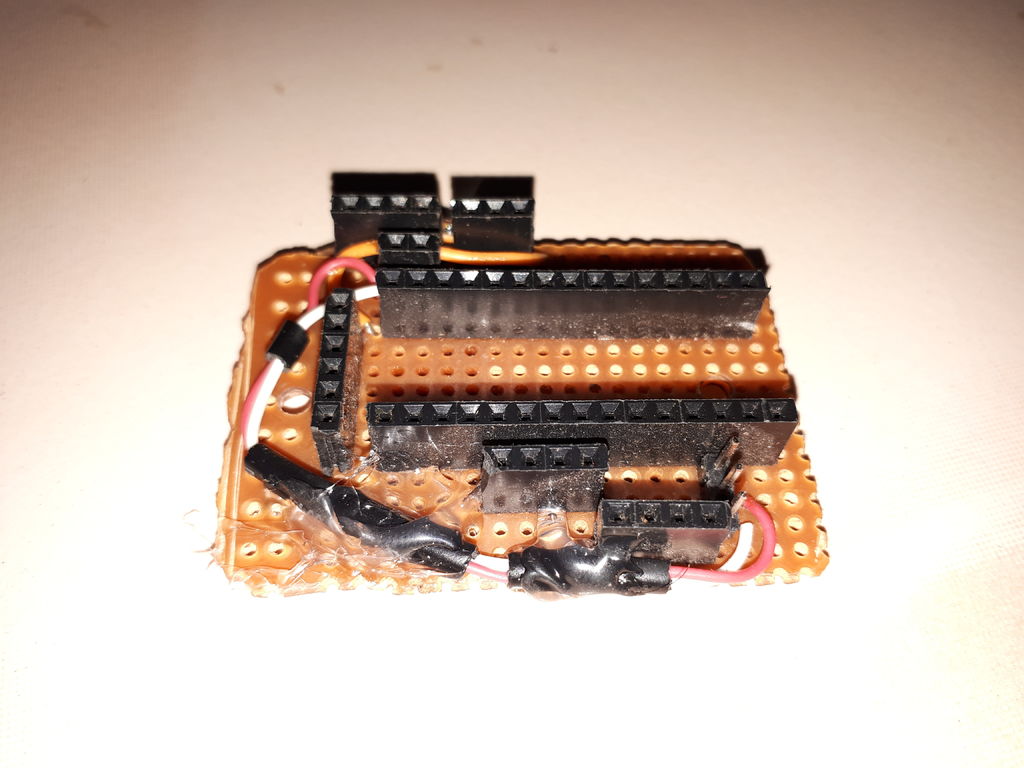
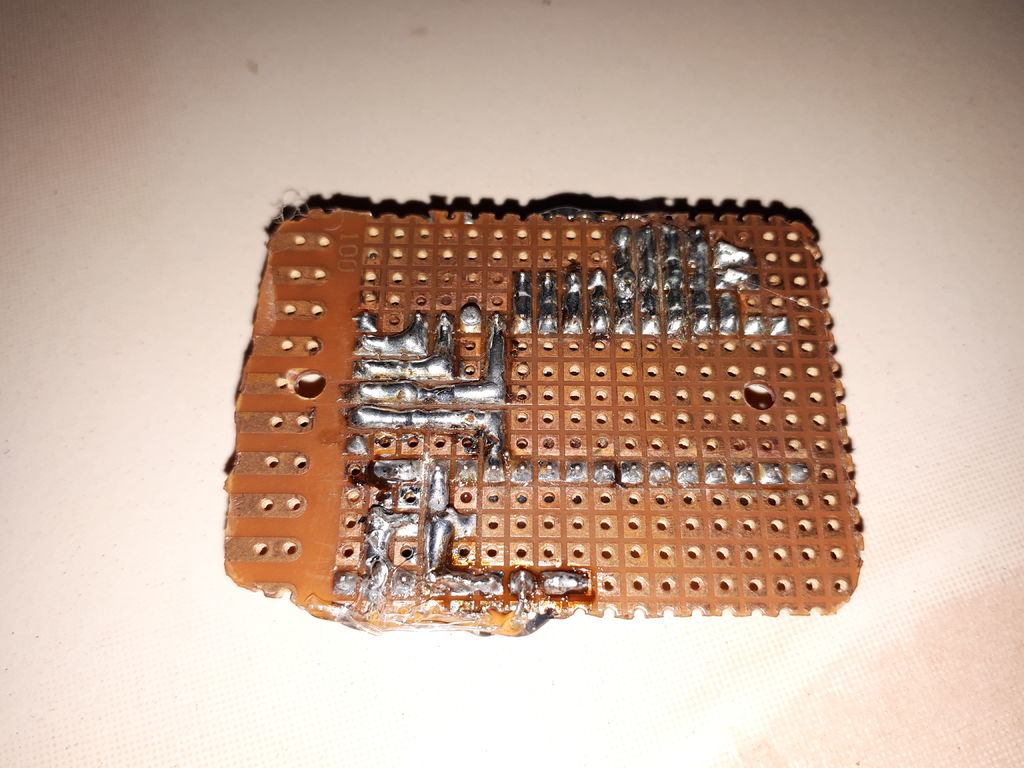
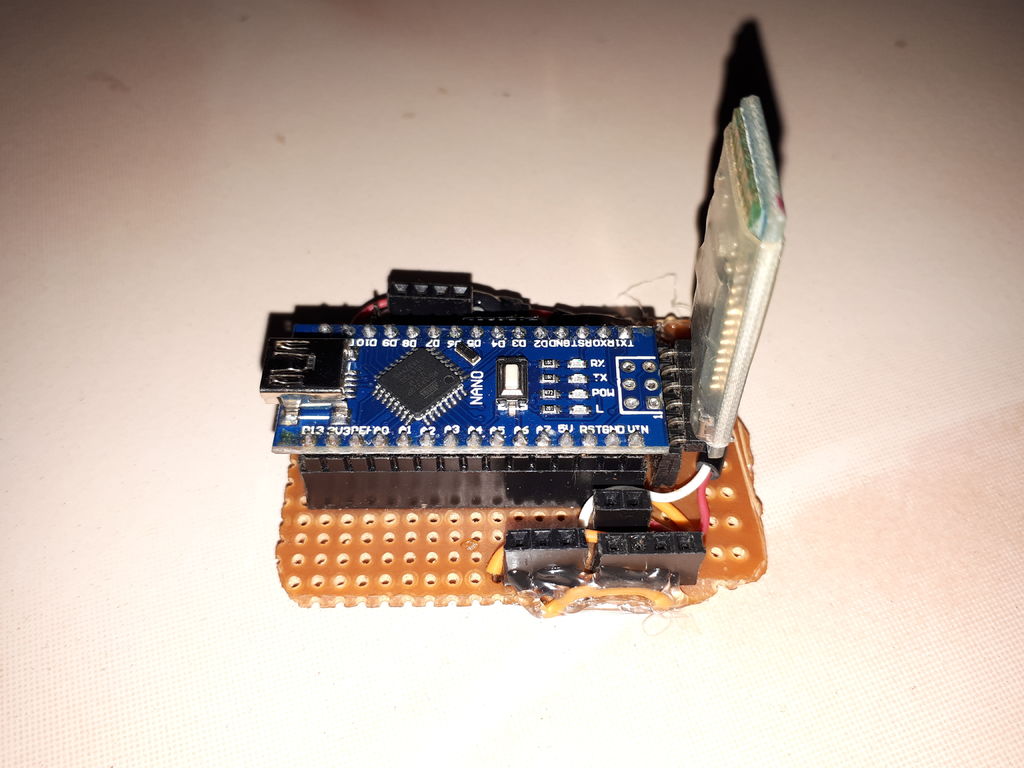
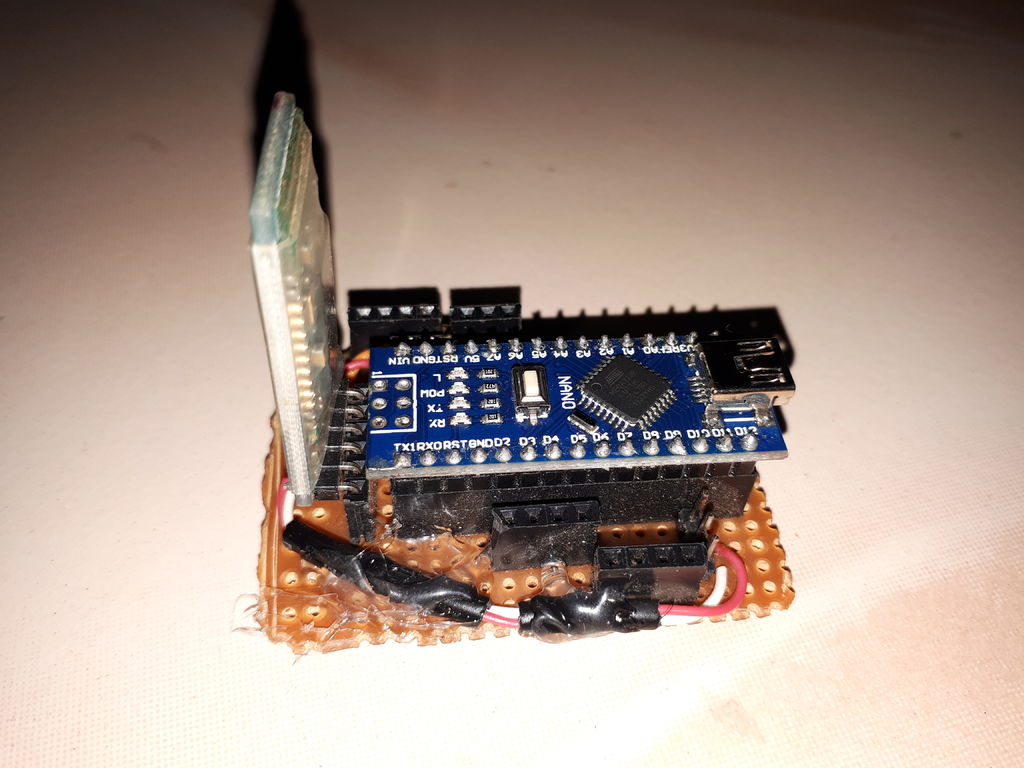

我制作一个像电路一样的屏蔽罩都是用母头和公头连接器针手工焊接的。连接线也是自己制造的。别忘了放两种不同的电源,因为我需要3天才能找到问题。将所有电源gnd连接到arduino gnd。
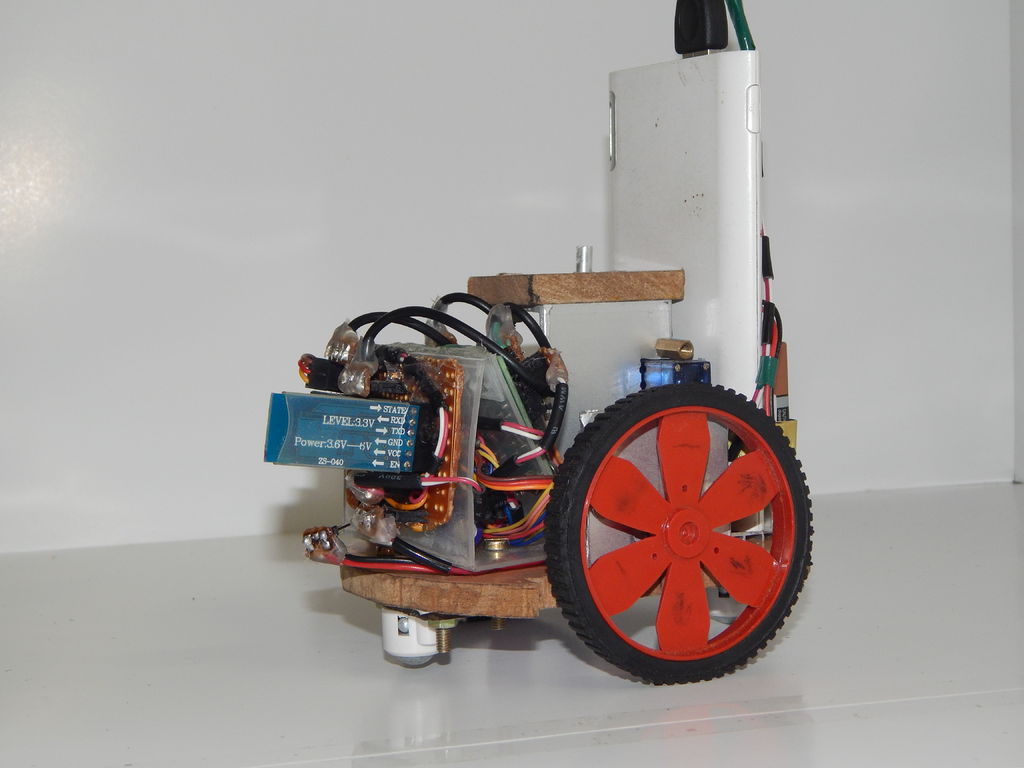
步骤6:完成Bot


1)将电路与机箱连接,我使用旧CD盒制作三角形底座并修复一侧是电路,另一侧是电机驱动器。
2)现在使用Arduino蓝牙RC车载应用来测试机器人。
3)将移动电源连接到Arduino电源。只有移动电源足以支持Arduino,蓝牙和步进。
检查机器人的Arduino程序如上所述
步骤7:Pen Up Down机制

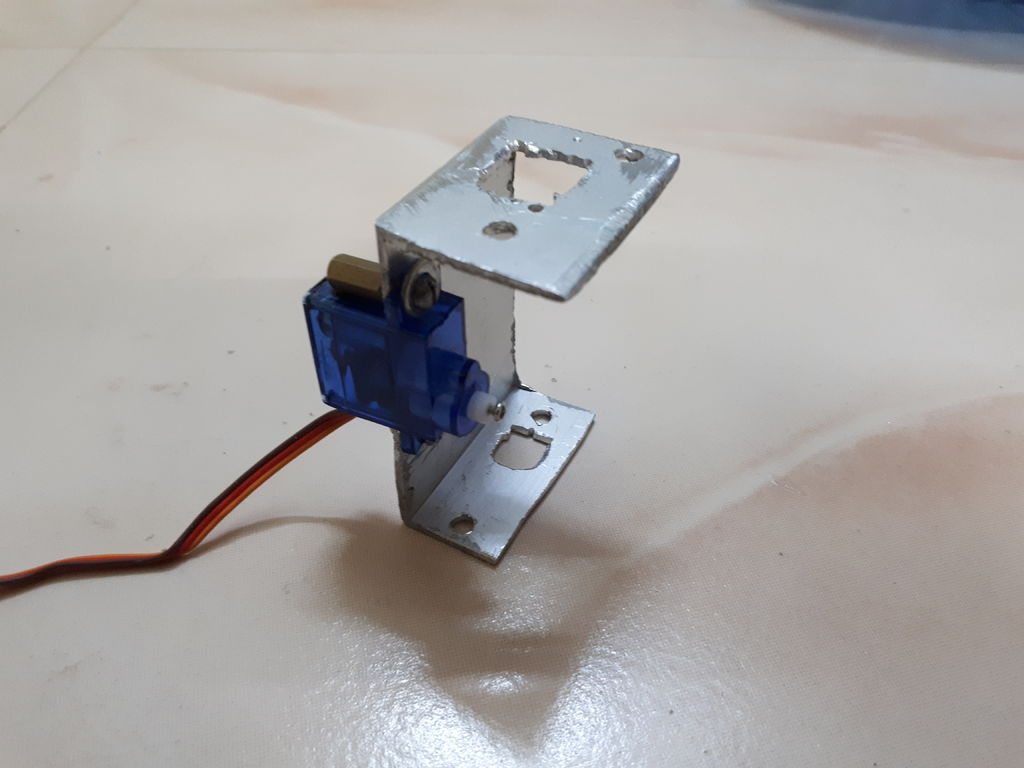
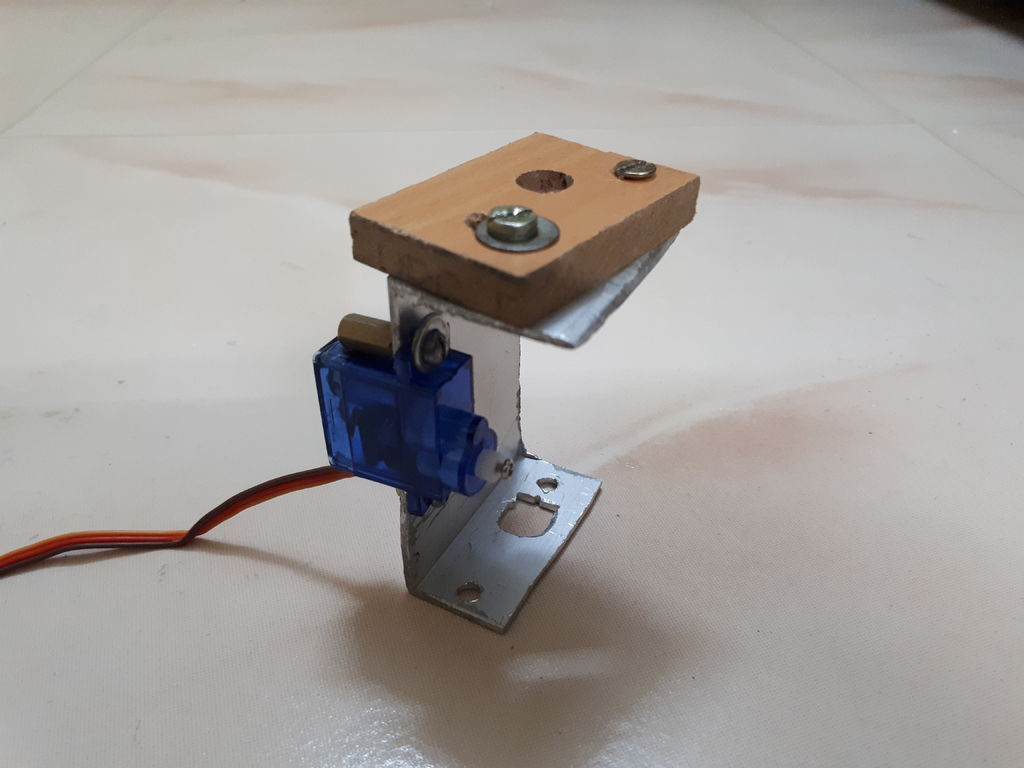
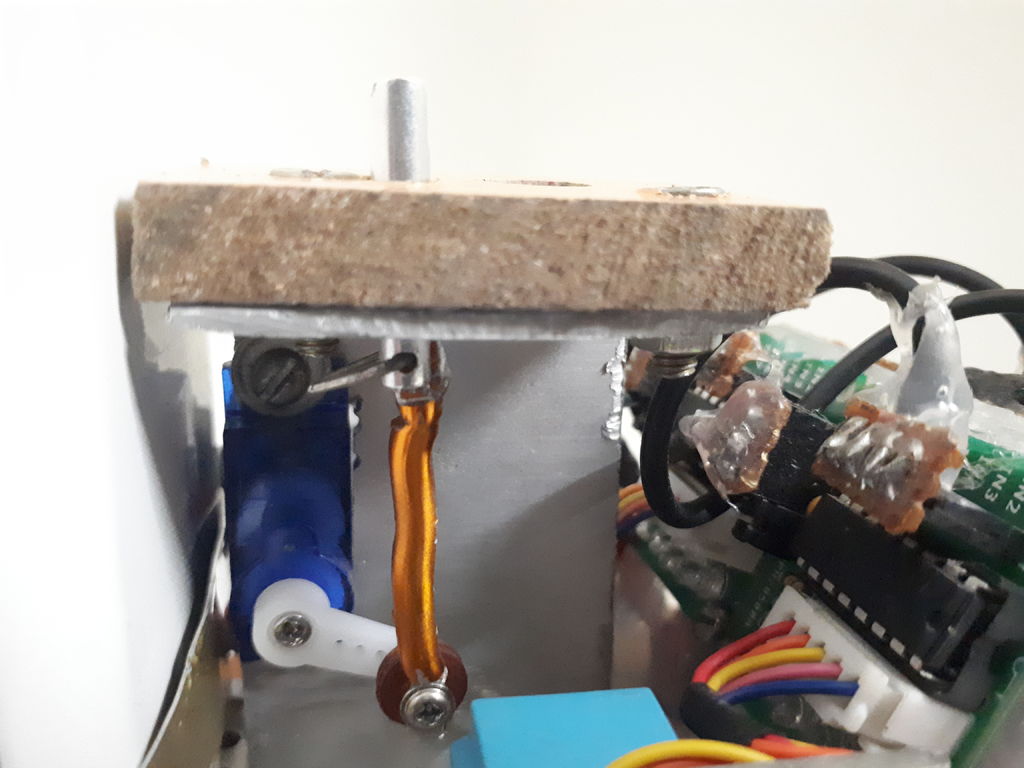

1)经过大量修改,我完成了上述笔快速更换笔的向上机构。
2)我使用连杆上下拉杆上下提升笔。
3)在草图笔上使用旧齿轮以获得重量和提升机制。
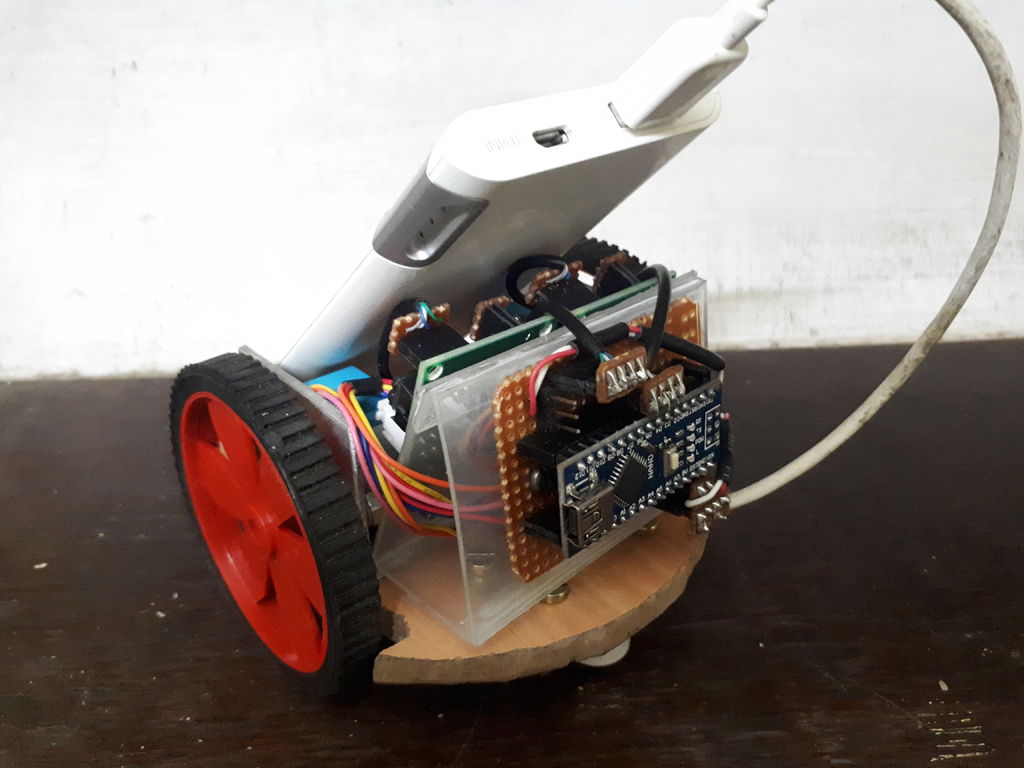
步骤8:完成Bot
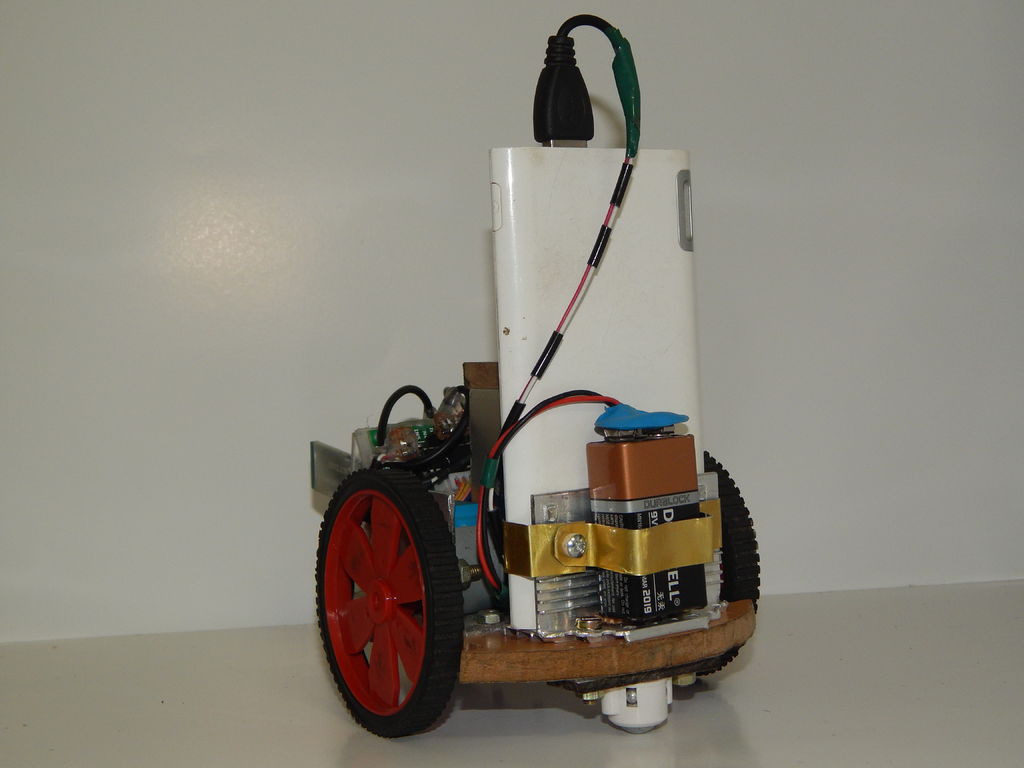

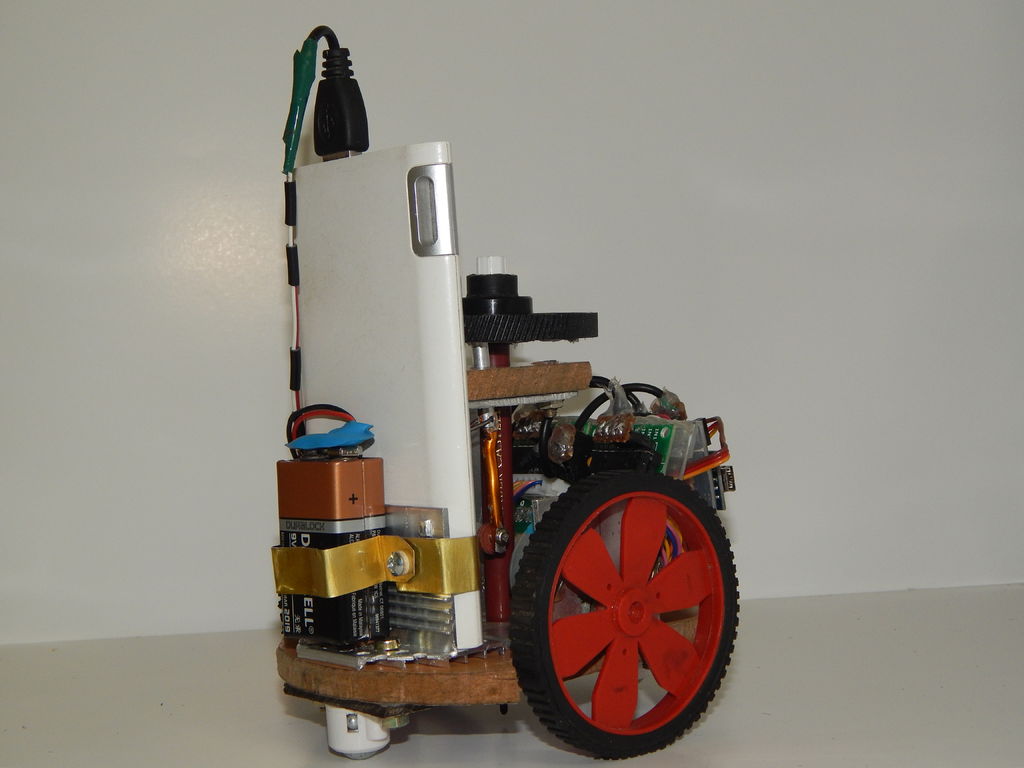
修理电池和移动电源我将旧的喷雾瓶和永久性的狐狸切开。现在基础工作已经完成,步进电机驱动的机器人已准备就绪。
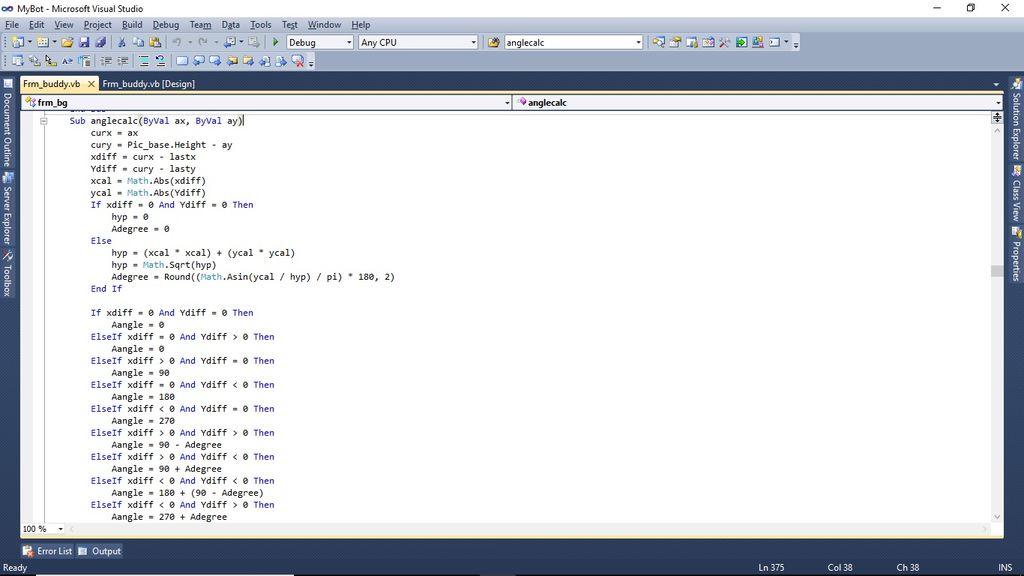
第9步:机器人数学
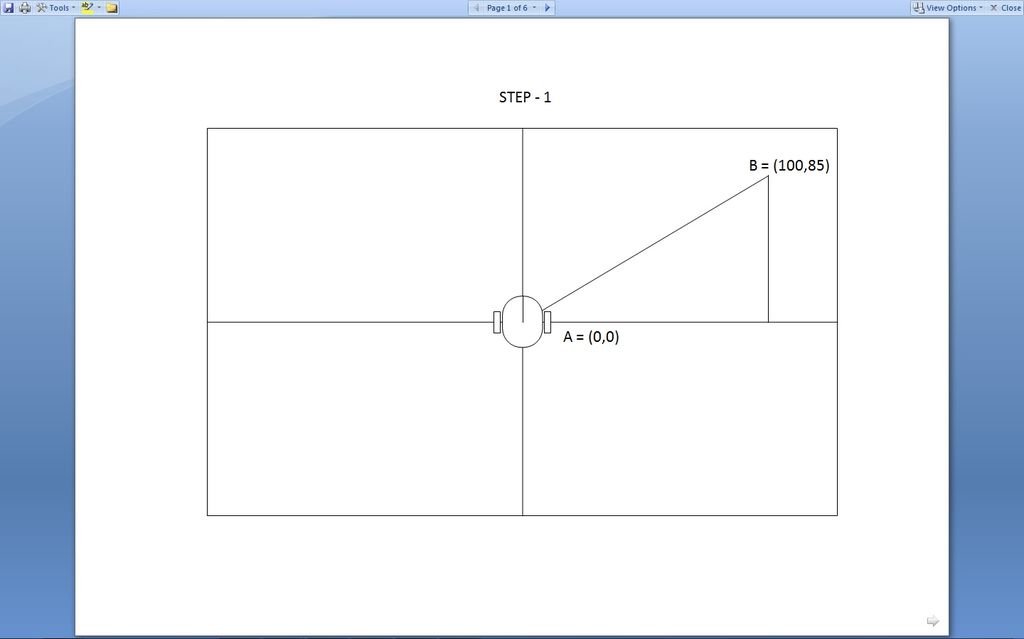
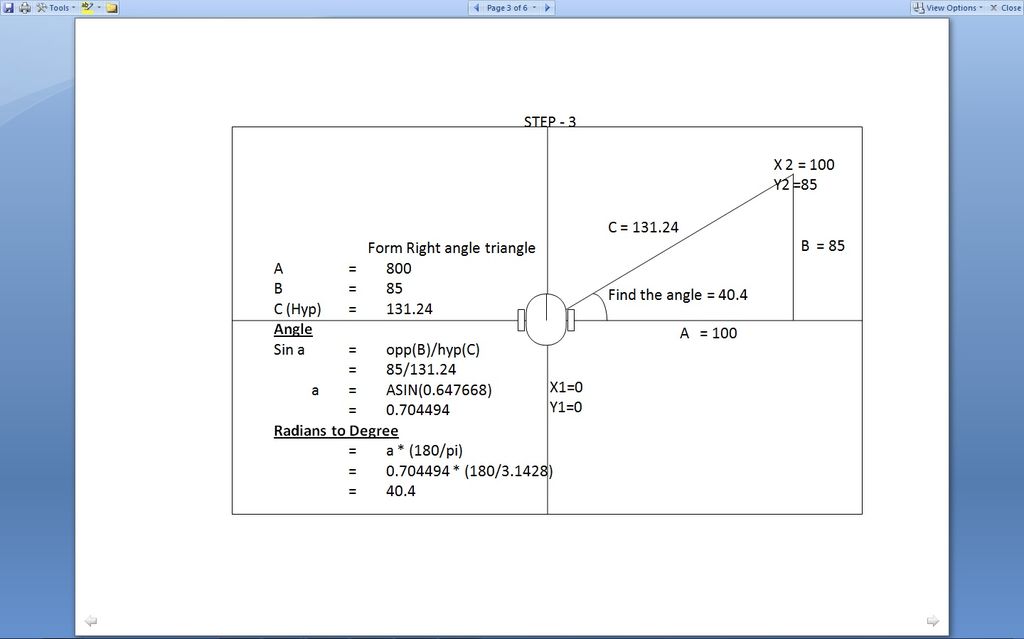
图中详细介绍了步骤。
1)程序的主要部分是计算机器人想要转动的旋转方向和它想要移动的距离。想想每次机器人位于图表的中心时,我们都有当前的位置和想要移动的位置。因此每个点都有一个X,Y位置,我们拥有机器人面临的当前程度。在开始时,机器人面向0度,它有359度旋转并朝那个方向移动。
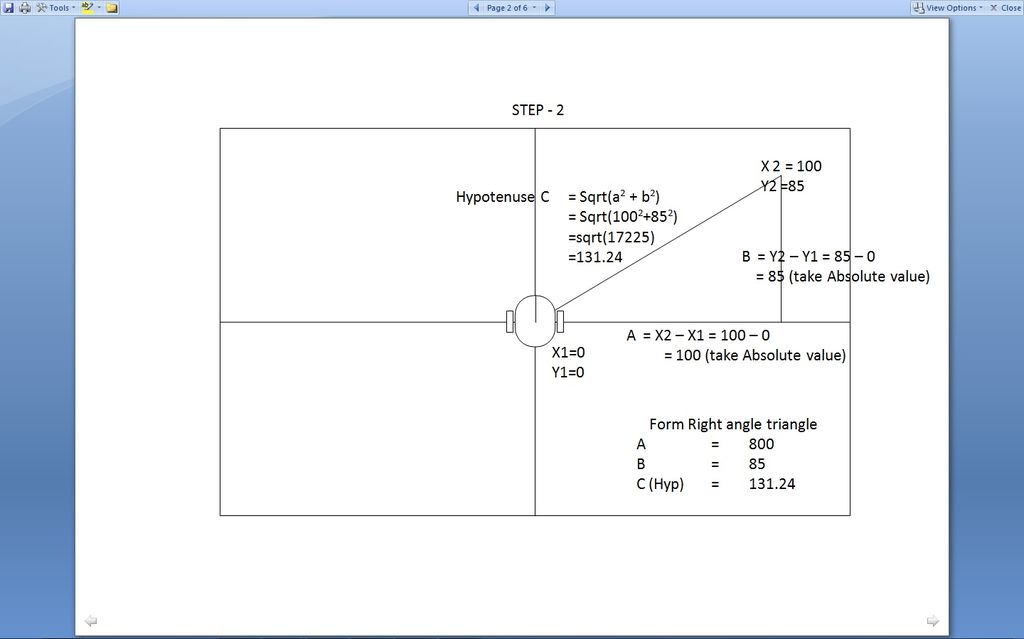
2)因此,对于当前位置和要移动的位置,按照步骤2找到宽度(a)和高度(b)并形成直角三角形。即使价值为负,也要绝对。使用Hypotenuse公式找到Hyp。
3)使用带有Hyp和B(对侧)的trignamentry公式查找度数。将弧度转换为度数。
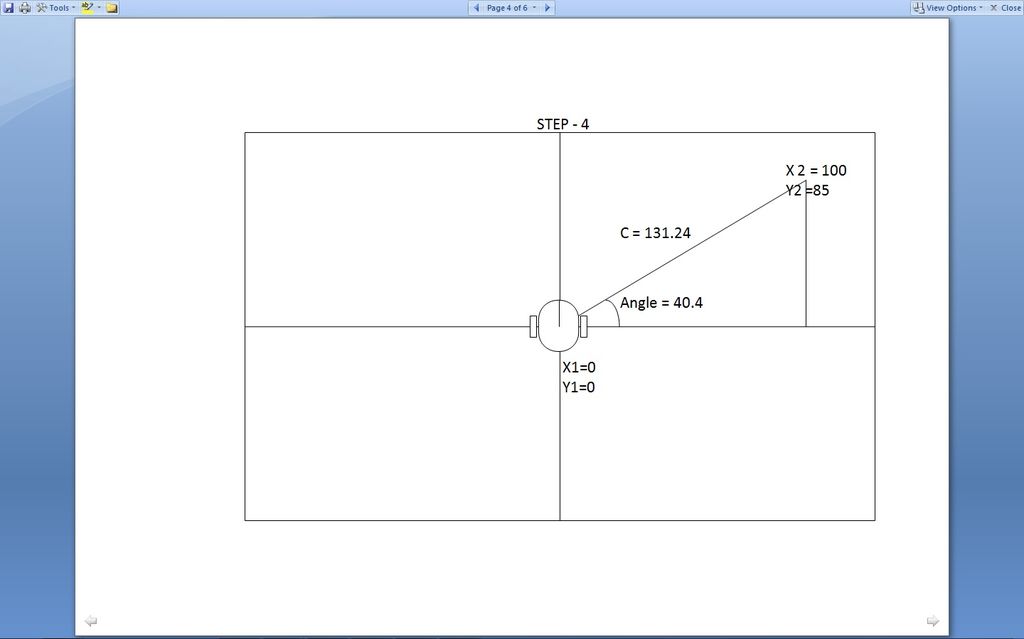
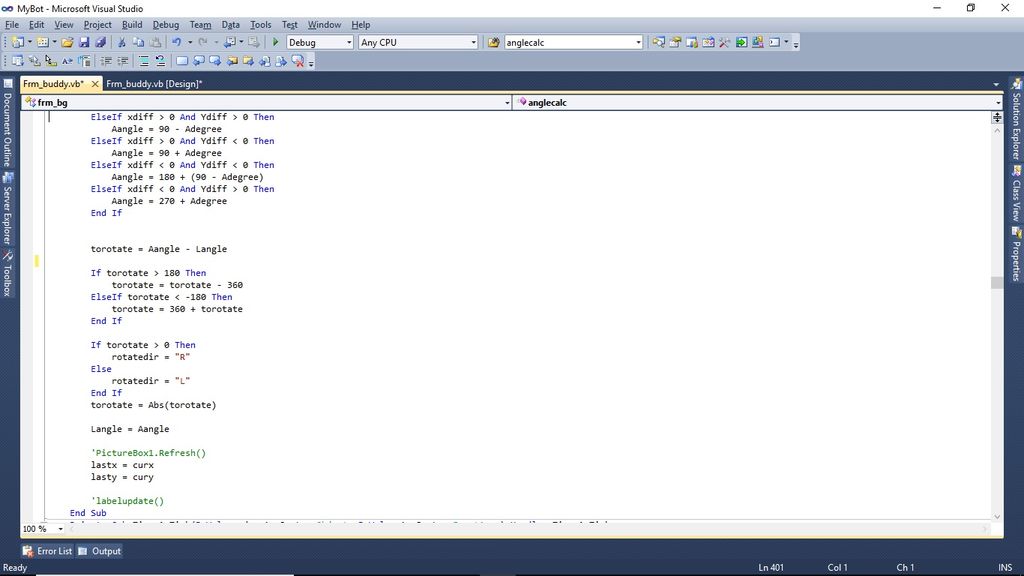
4)现在我们得到了距离想要移动的距离,并且我们得到了点所在的度数。只有在旋转后才会移动。要计算Bot旋转角度用户步骤5.
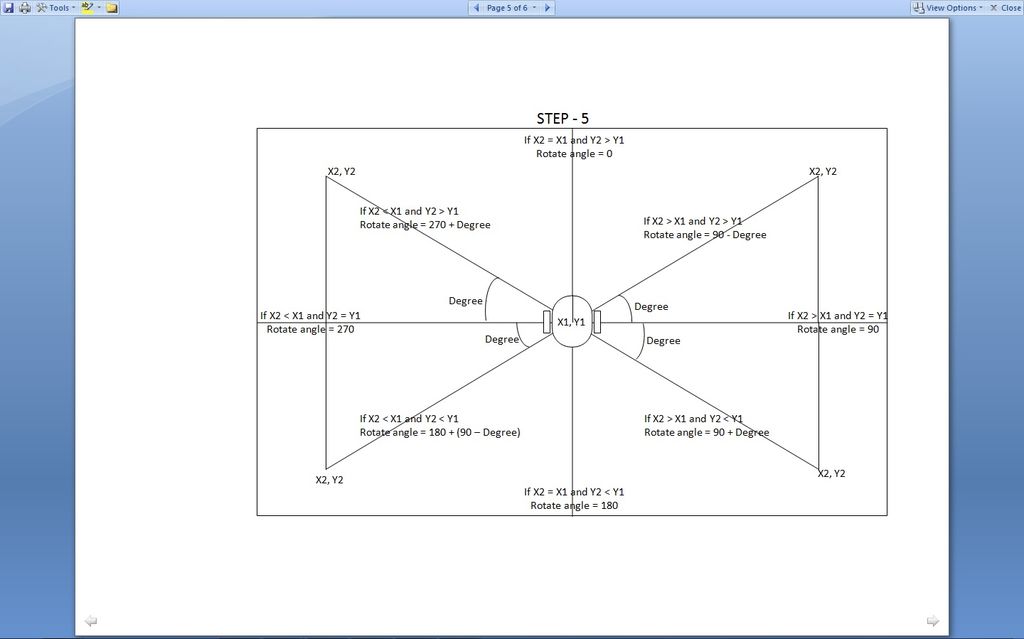
5)步骤5有很多逻辑因为机器人在任何一方都有分数。因此,根据当前位置和下一个位置点位置计算旋转角度。
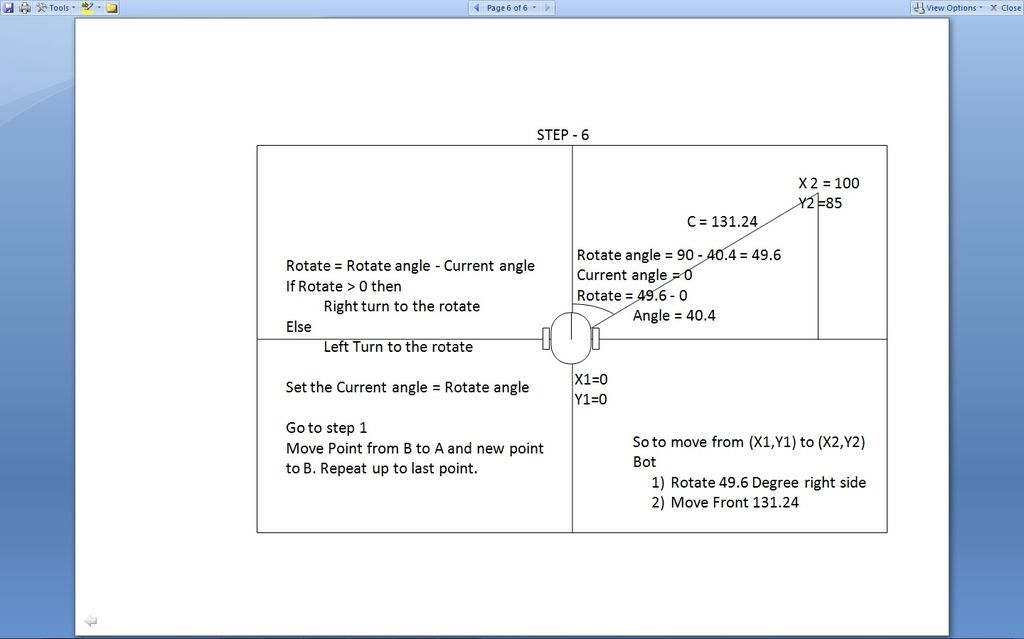
6)使用存储器中的当前角度,根据步骤4找到旋转角度和方向。现在按照计算旋转左侧或右侧,并移动Hyp编号的步骤。现在将新点作为当前点并获取下一个点并再次转到步骤1
一次又一次地重复这些步骤直到程序完成。
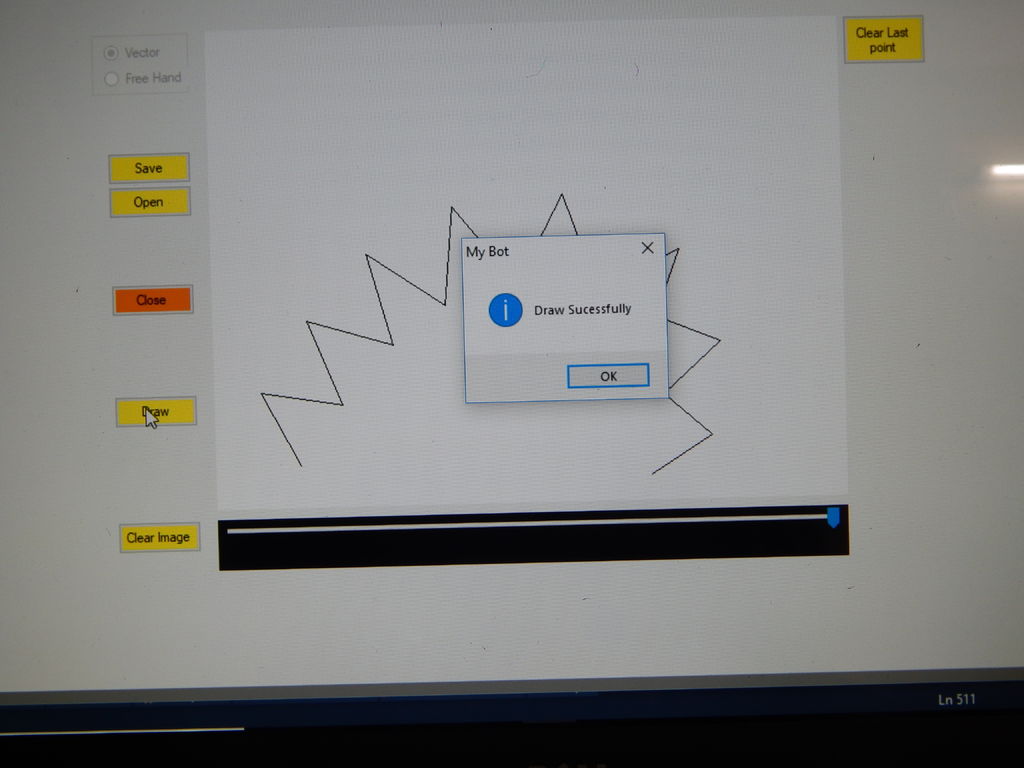
步骤10:VB.net 2010程序
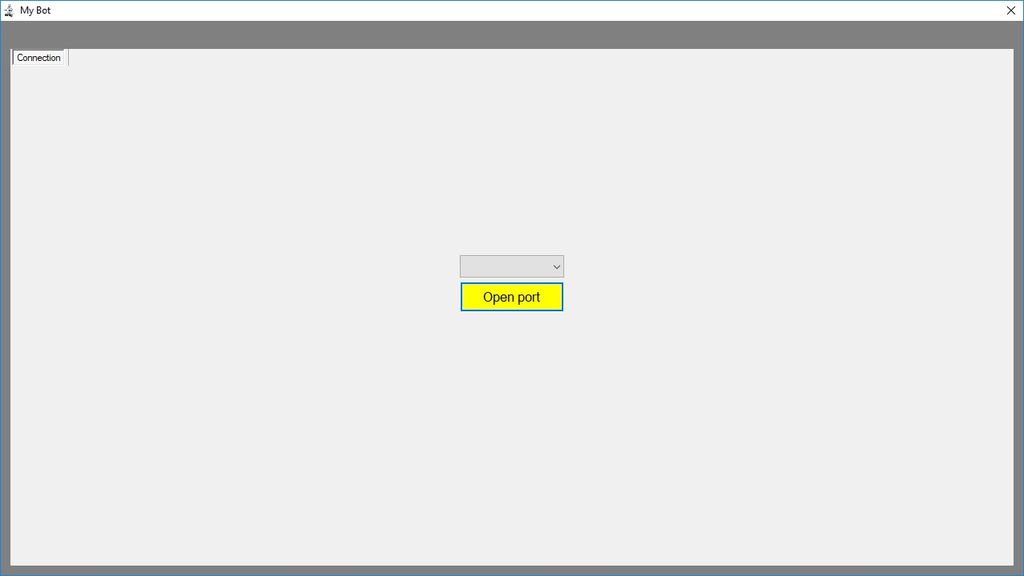
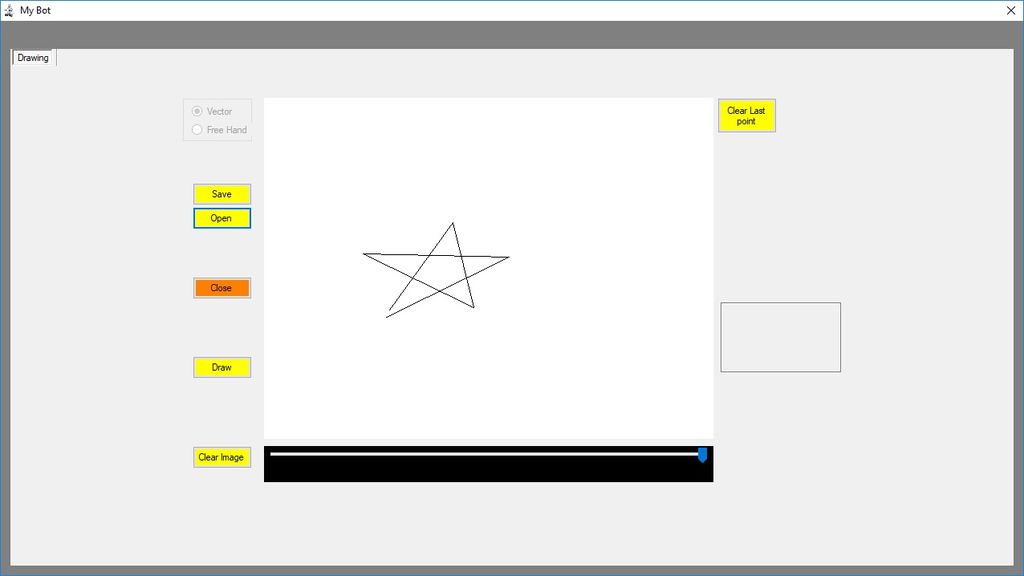
1)在Designer视图中我们有两个Tab控件。一个通过蓝牙与Bot连接。另一个是绘图窗口。
2)使用鼠标或手绘制绘图的空白区域,我们可以保存绘图并打开它。
3)左侧的一个名为Draw的按钮单击可将图片框中的图像绘制到地板或纸张上。
4)上一张幻灯片的第5步程序在前两张图片中。
5)按下绘图后,计算一个点和笔状态并找到旋转角度和行程距离,将其发送到机器人。一旦机器人到达该点,它就会回复并且下一个点根据发送点发送,图像显示在屏幕上。一旦它到达终点。最后一个位置到主页轮换并指向发送到机器人。
6)在此页面下载应用程序,解压缩并安装最新的.net框架并运行。
注意: - 首先,我使用逗号分隔符创建一个命令,并尝试使用substr分割字符串,但如果长度很高,则在arduino中,字符串函数永远不会工作。因此,逐步发送点。
步骤11:Arduino程序 - 计算脉冲数
当前Bot工作
1)所以现在如果两个步进电机都朝相反方向旋转,则机器人向前或向后移动。对于步进电机28byj-48,我们需要4096个脉冲进行一次完整旋转。
2)如果向左或向右转动同一方向。计算步进器想要旋转一整圈的度数并将其除以360以找到1度的旋转或从底盘中心找到轮子的中心并找到它的圆周除以轮周长。现在用这个结果乘以4096表示完全旋转需要多少个脉冲。对于我的车轮和底盘,结果是5742脉冲并将其除以360,15.95脉冲进行1度旋转。
步骤12:Arduino程序
在上一页中,计算学位的步骤。旋转方向,度数和移动距离由VB.net程序计算并通过蓝牙发送。一旦数据以Starting字符“&”收到,结束字符为“$”,则子字符串拆分并通过旋转电机和伺服器执行命令。完成后,将“@”符号回复给笔记本电脑。
步骤13:MyBot准备就绪

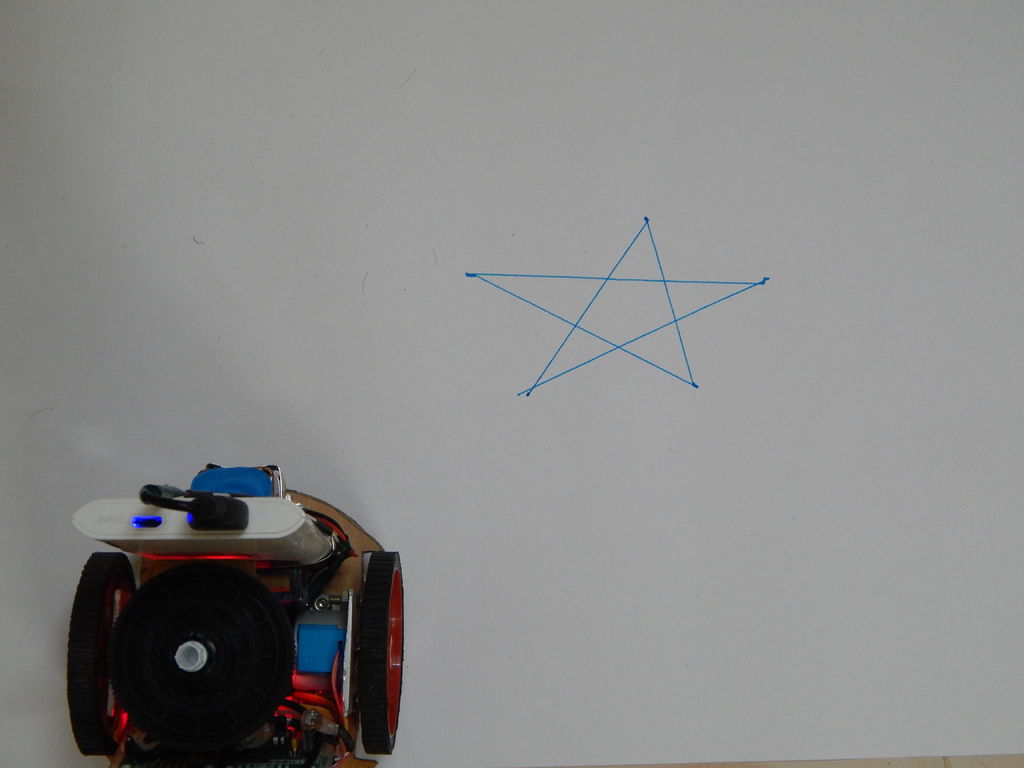

现在是时候看视频了解它的工作原理。我们有很多不同的颜色草图可以轻松地改变颜色并绘制您自己的图纸,无需任何上传。计划在机器人中进行大量升级。
- 相关推荐
- 热点推荐
- 机器人
-
基于CNC的绘图机器人Arduino GRBL CoreXY Drawbot2023-06-25 1290
-
3D打印迷你CNC绘图机设计2023-02-25 3157
-
绘图机器人开源分享2023-02-10 829
-
制作Arduino XY绘图仪绘图机器人极谱仪2022-11-29 1384
-
DIY一个机器人套件2022-08-03 1864
-
mXY板-低预算XY绘图仪绘图机器人板2022-07-01 1199
-
设计一个低预算XY绘图仪绘图机器人板2022-06-20 1791
-
怎样去设计一种基于STM32的绘图机器人呢2021-12-21 1860
-
基于stm32的绘图机器人设计 精选资料推荐2021-08-11 2075
-
绘图机器人求驱动2021-06-04 16303
-
Scribit墙壁绘图机器人:一款可以在墙上涂鸦和创作的机器人2018-10-10 4567
-
简易机器人DIY——常用工具篇2015-03-06 11877
-
DIY机器人2012-08-15 13577
全部0条评论

快来发表一下你的评论吧 !
