

如何用手臂控制一个DOF机器人手臂
电子说
1.4w人已加入
描述
步骤1:方框图/Scematic
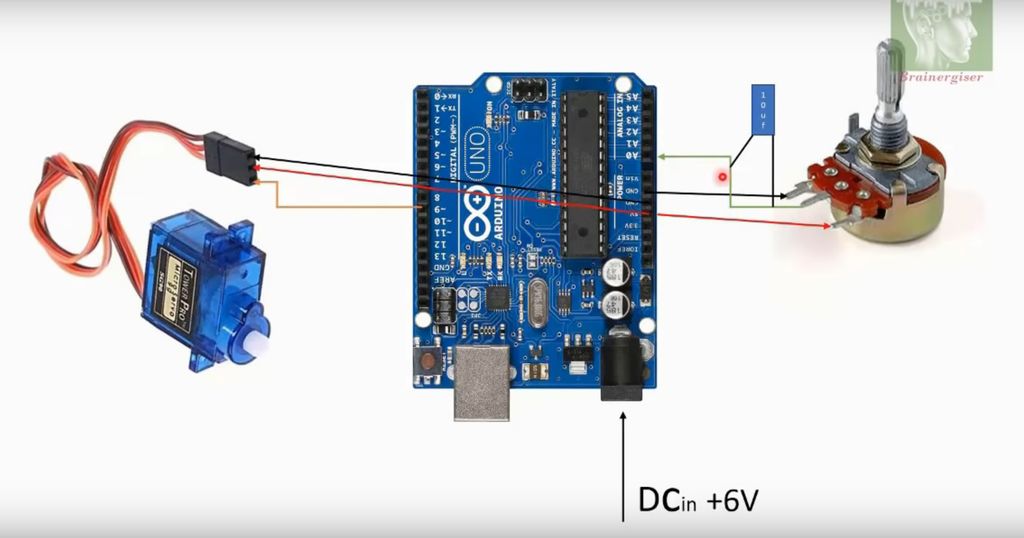
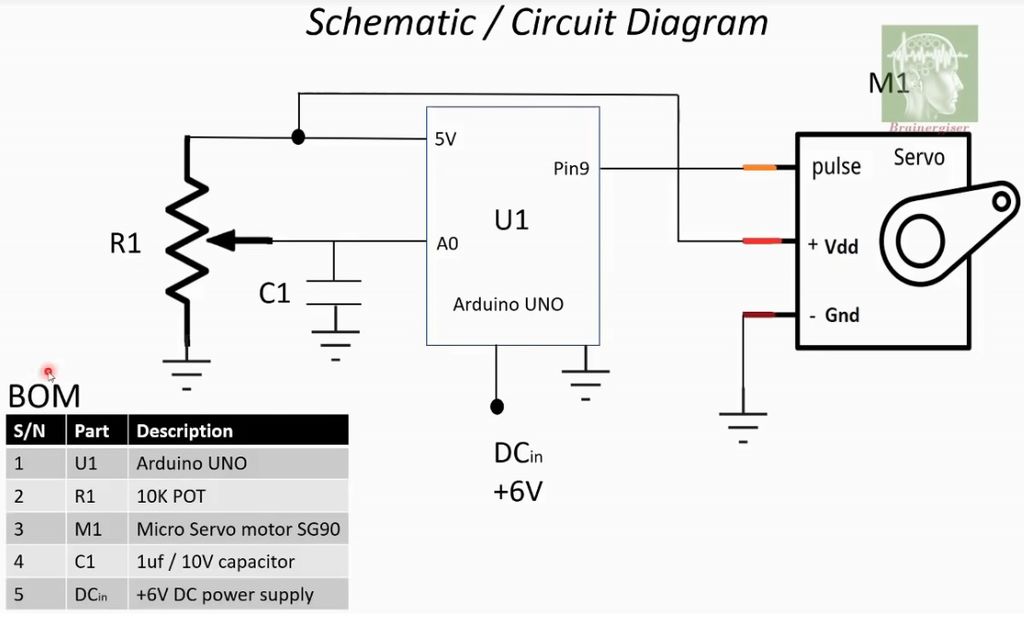
制作所需的电子元件:
1》 Arduino UNO板
2》 Micro SErvo电机
3》 10 K POT
4》 1uf,16V电容。
连接到端口-9和POT的伺服引脚连接到Arduino板的端口-A0。
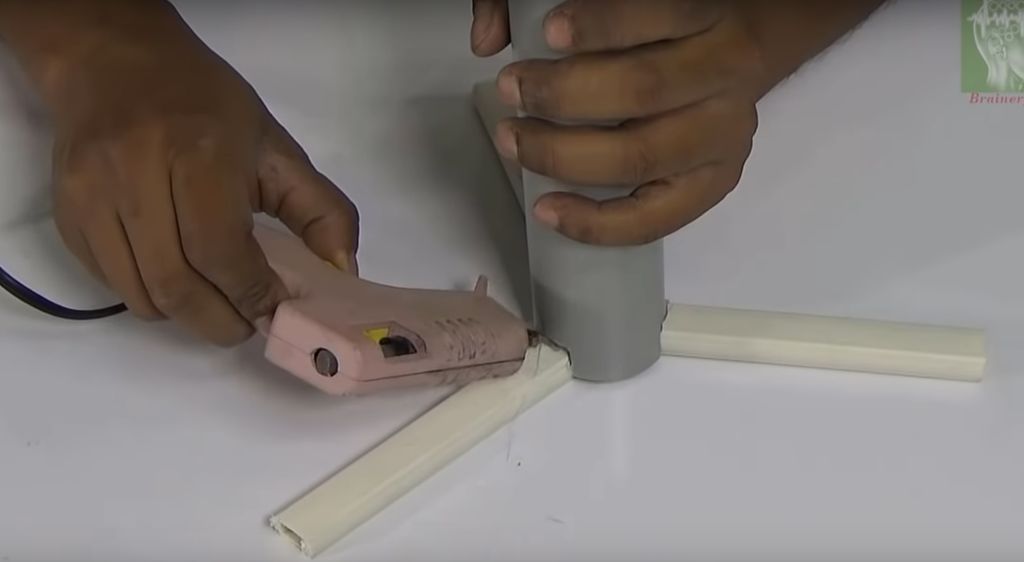
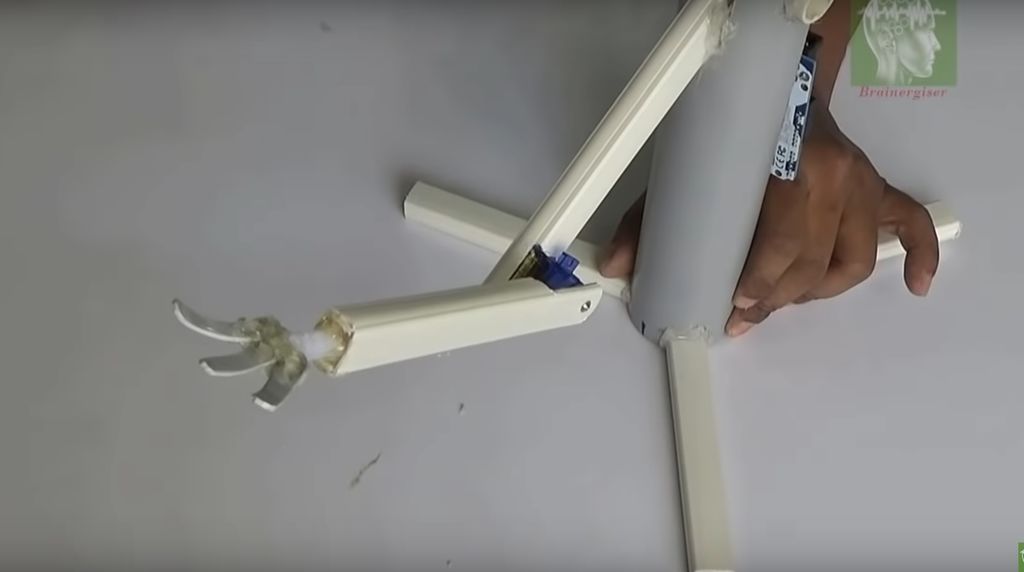
第2步:构建传感器
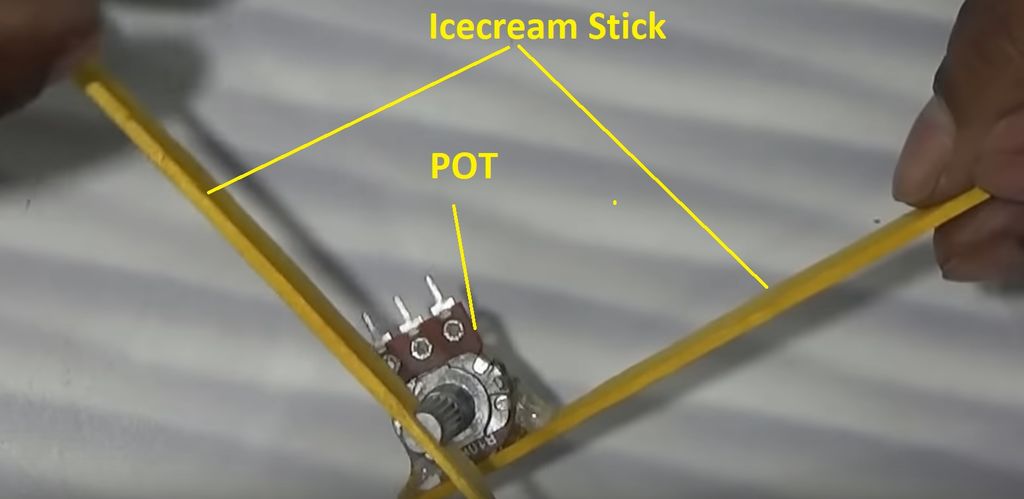
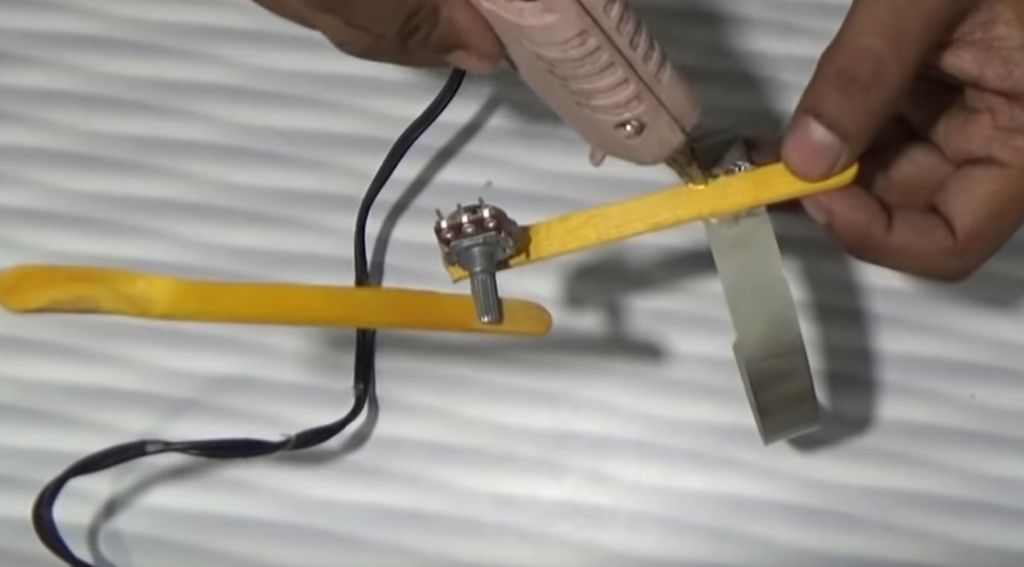

我们使用过两个冰淇淋棒和一个半PVC管,使传感器成为我们手臂的一部分。使用热胶将一根棒连接在罐和PVC管之间。其他棒只附有POT。
将半PVC管与夹子一样连在一起。 POT位于肘部,传感器杆的另一侧需要自由运动,因此使用橡皮筋与前臂连接。
第3步:构建手臂

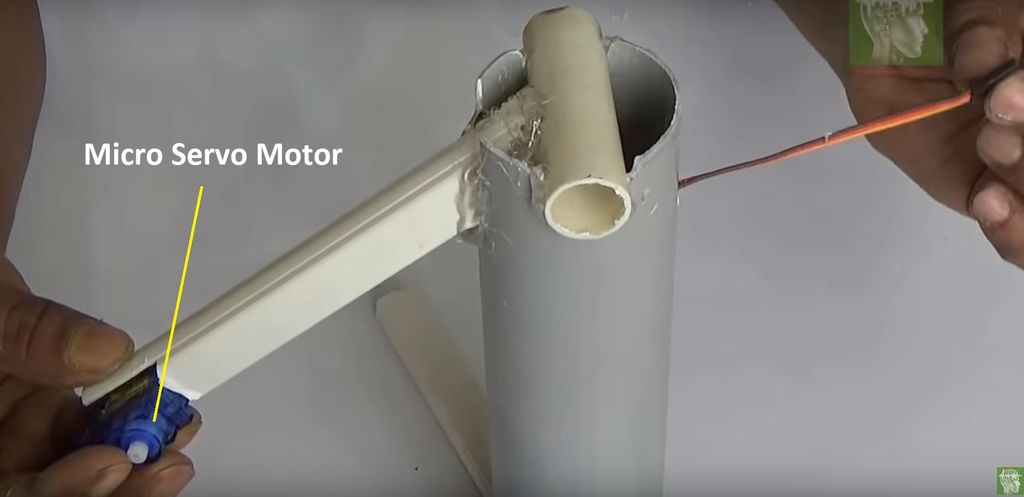


我们使用PVC管和电线套管制作一个自由度(DOF)机器人手臂。用于弯头联合我们使用一个伺服电机。伺服连接到Pin-9的Arduino板。
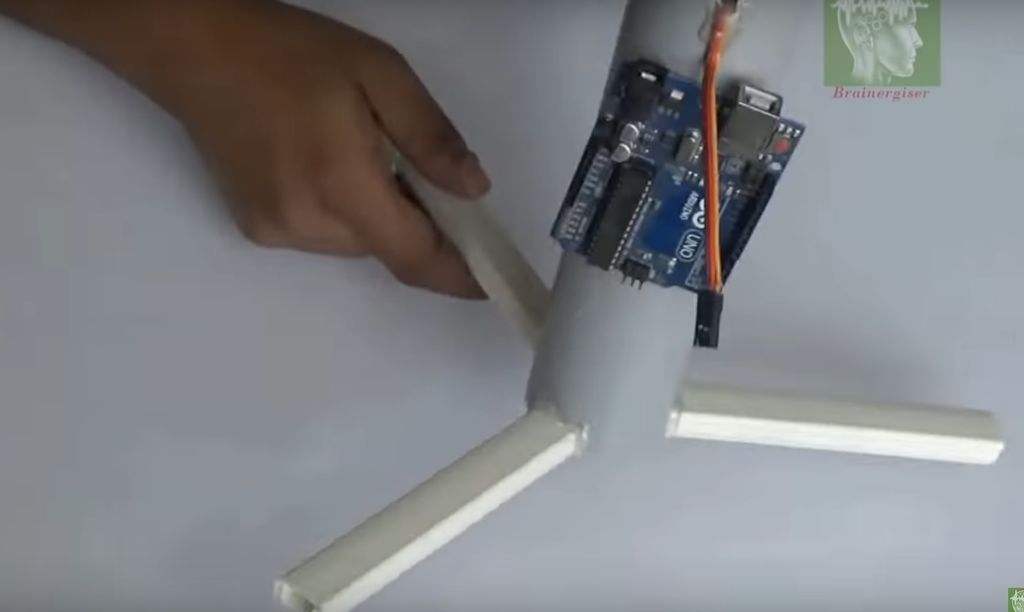
第4步:Arduino代码
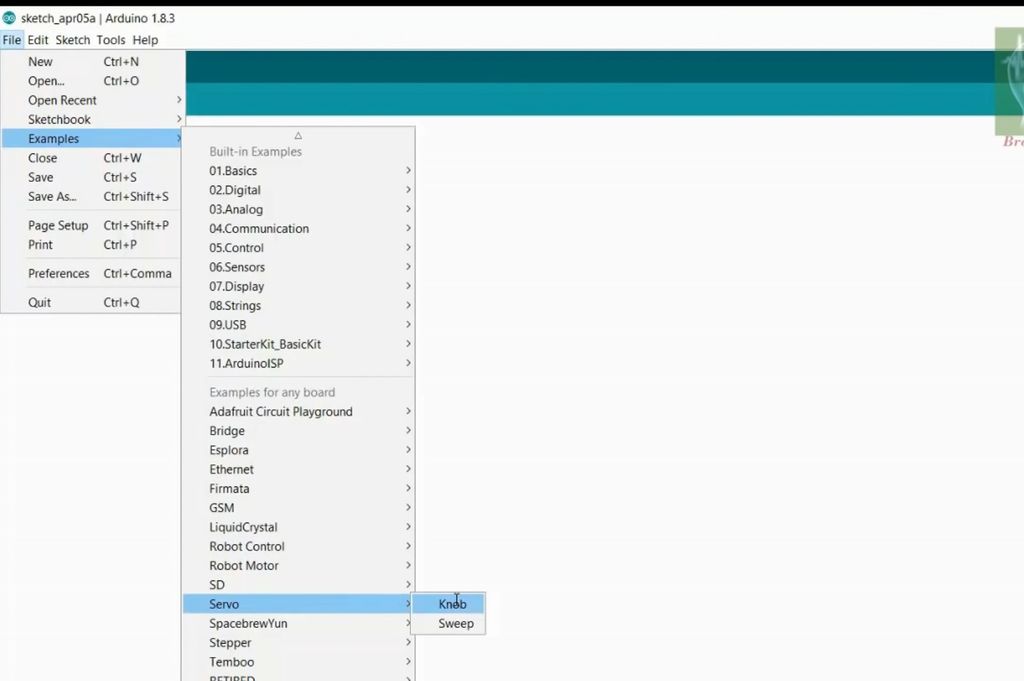
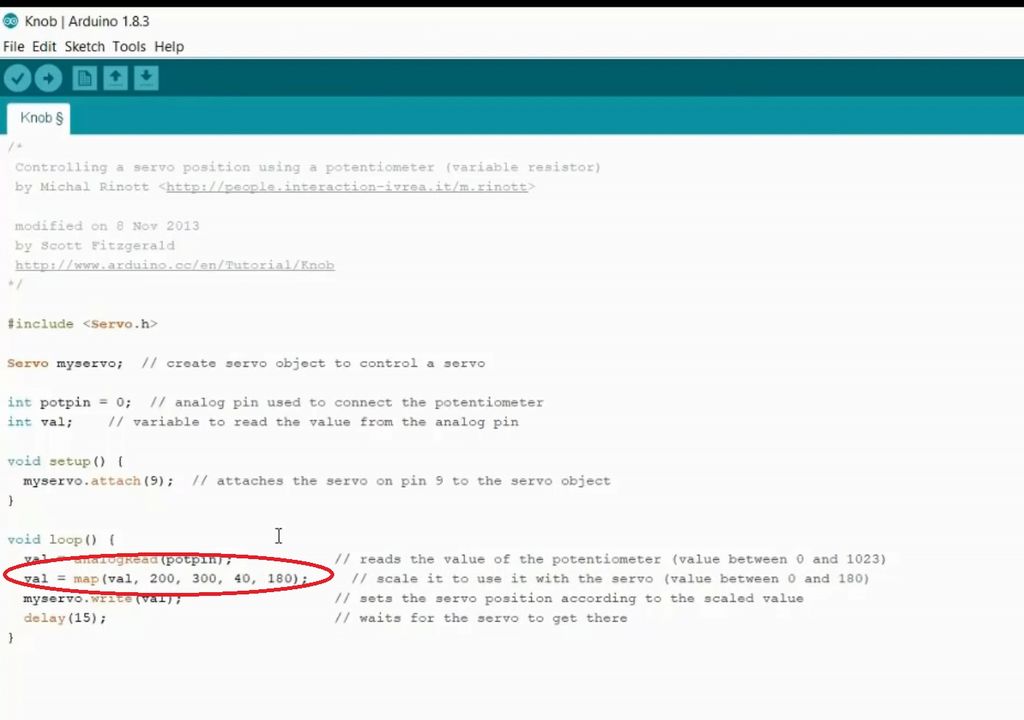
这很容易。它读取连接POT的Port-A0的模拟值,并根据该值从地图数组中生成一个值。它发送到pwm端口-9。基本上它是Arduino IDE中的示例文件。转到file-》 example- Servo-》 knob.You只调整map()函数的值。
步骤5:最终装配和测试

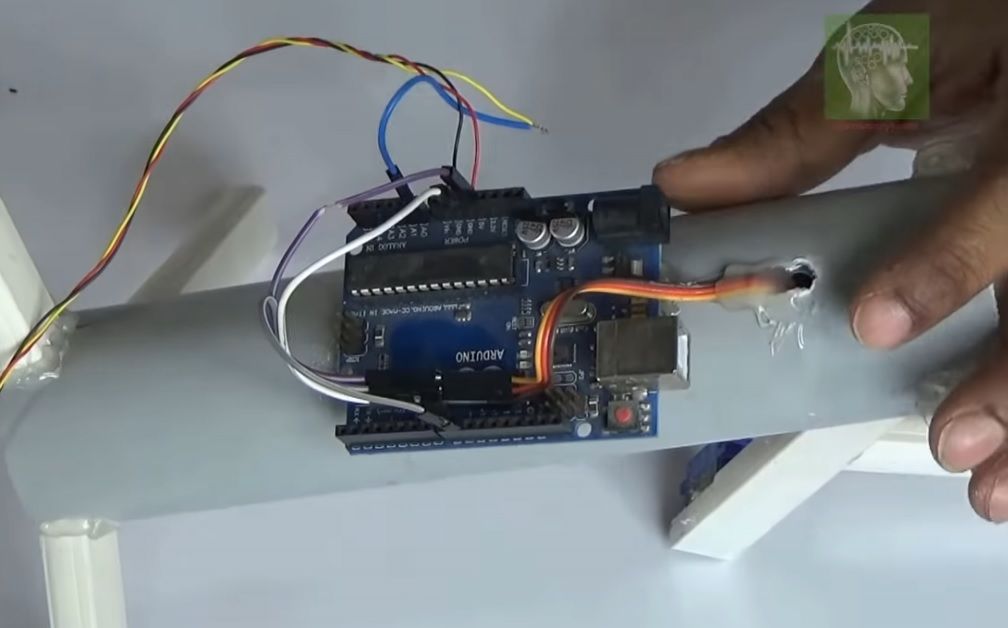
连接伺服和锅线Arduino按照原理图。加载草图。使用外部6V电源为Arduino UNO供电。精细调整地图功能。现在喜欢玩这个机器人。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
如何创建FPGA控制的机器人手臂2023-10-24 2749
-
用于Arduino Due的DIY Braccio机器人手臂护罩2023-06-14 1272
-
Arduino机器人手臂2022-12-30 837
-
机器人手臂使用哪种型号的泰和承比较合适2022-03-17 1112
-
中国科大展示软体机器人手臂在日常生活中的巨大应用潜力2021-04-13 4051
-
Arduino与树莓派打造Chatbot语音控制机器人手臂2021-03-16 1392
-
Hibot机器人手臂Float Arm可用于哪些应用环境2020-04-20 7755
-
在未来机器人手臂将可以替代人类的双手2019-09-17 2497
-
怎样使用Android手机的蓝牙控制机器人手臂2019-07-29 9687
-
机器人手臂的典型机构有哪些2019-07-08 83091
-
STM32的医疗康复机器人手臂控制系统2018-08-22 4543
-
关于蓝牙控制Atmel制造的机器人手臂的介绍2018-07-09 4189
-
机器人手臂5种不同的运动组合2018-04-18 19888
-
用意念控制的植入式机器人手臂2012-11-30 5240
全部0条评论

快来发表一下你的评论吧 !
