

游泳池清洁机器人的制作
电子说
描述
第1步:工作机制

运动和收集:
我们原型的基本机制包括在前面不断旋转的传送带,以收集碎屑和污垢。
两个驱动的电机运动所需的水轮。
导航:
手册模式:使用Mobile的加速度计数据可以控制Skara的方向。因此,这个人只需要倾斜他的手机。
自主模式:我已经实现了一个随机运动,补充了避障算法,以便在感知到靠近墙壁时帮助自动机。两个超声波传感器用于检测障碍物。
步骤2:CAD模型

CAD模型在SolidWorks上完成
您可以在此instructables中找到cad文件
步骤3:组件




机械:
激光切割面板-2nos
4mm厚的亚克力板
Thermocol或聚苯乙烯板
车床切割杆
弯曲的塑料板(木质饰面)
3d打印部件
螺丝和螺母
模板(“Skara”打印)
Mseal-环氧树脂
Net Fabric
工具:
砂纸
涂料
角磨机
钻头
刀具
其他电动工具
电子产品:
NodeMCU
螺丝连接器:2pin和3pin
降压转换器mini 360
拨动开关
IRF540n- Mosfet
BC547b-晶体管
4.7K电阻器
单芯电线
L293d-电机驱动器
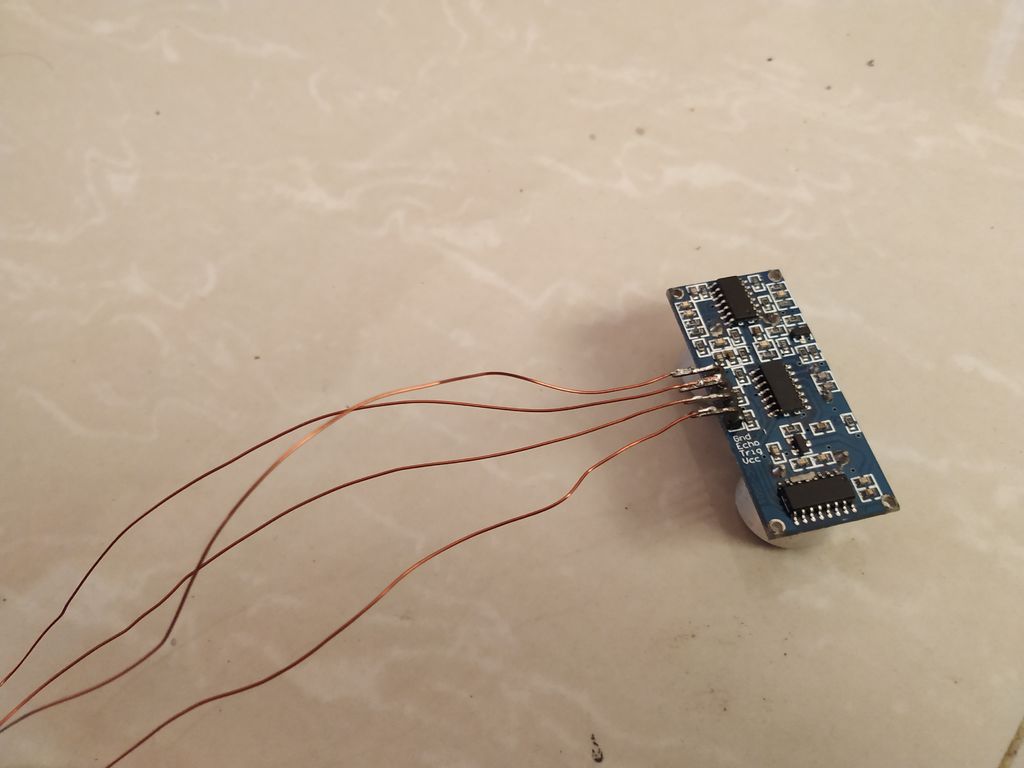
超声波传感器 - 2nos
100rpm直流电机 - 3nos
12v铅酸电池
电池充电器
焊接板
焊接电线
焊接棒
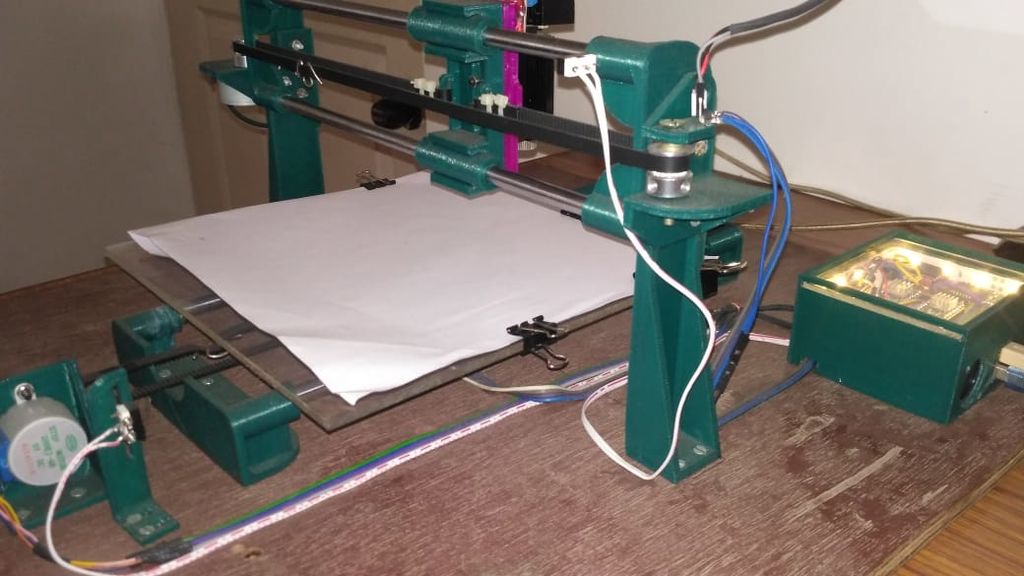
第4步:3d打印



3d打印由我的朋友之一的家用组装打印机
您可以找到4个必须打印的文件
通过将3d CAD文件转换为stl格式来打印零件。
水车采用直观设计,翼型翅片可以移动ace水比传统设计更有效。这有助于减少电机的负荷,并显着提高自动机的运动速度。
步骤5:激光切割板和车床杆





边 面板:
为了使CAD渲染成为现实,必须仔细考虑为原型构造选择的材料,同时要记住整个结构需要具有净正浮力。
主要结构如图所示。框架的最初选择是采用铝合金7系列,因为它具有更轻的重量,更好的耐腐蚀性和更好的结构刚性。然而,由于当地市场上的材料不可用,我不得不用Mild Steel制造。
Side Frame Cad转换为.DXF格式并提供给供应商。您可以找到此instructable中包含的文件。
在LCG3015上进行激光切割
车床杆
连接两个面板并支撑箱体的杆是通过当地制造商店的车床加工制成的。
需要总共4个杆
步骤6:构建Bin








Bin is使用亚克力板制成,使用电动工具切割,尺寸参考CAD图纸。
使用工业级防水环氧树脂将垃圾箱的各个切割部分组装在一起。
整个底盘及其组件在4mm不锈钢的帮助下组装在一起螺栓和3个不锈钢螺柱。使用的螺母是自动锁定的,以避免任何性质的顺应性。
完成丙烯酸板两面的圆形孔以放置电机
然后将电池和电子设备外壳从1mm塑料板上切下并包装到机箱中。电线开口正确密封和绝缘。
第7步:浮动







与纯粹结构相关的最后一个组件是浮选装置用于使整个原型具有正浮力,并将其重心保持在大致整个原型的几何中心。
浮选装置由聚苯乙烯(thermocol)制成。砂纸用于正确塑造它们
然后通过使用mSeal通过计算考虑上述约束将它们附着到框架上。
步骤8:超声波传感器支持
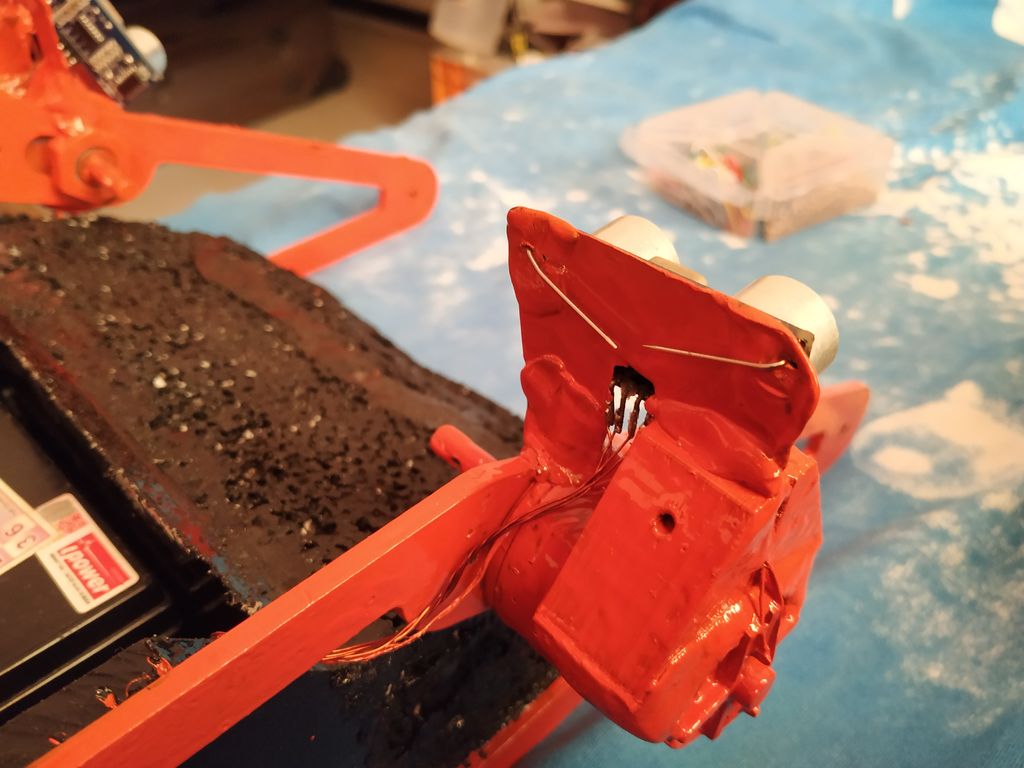


这是使用锡板制作3d印刷和背板
使用mseal(一种环氧树脂)
步骤9:电子





12V铅酸电池用于为整个系统供电
与降压转换器和L293d电机控制器并联
降压转换器将12v转换为5v用于系统
IRF540n mosfet用作控制传送带电机的数字开关
NodeMCU用作主微控制器,通过WiFi(热点)连接到手机
步骤10:传送带

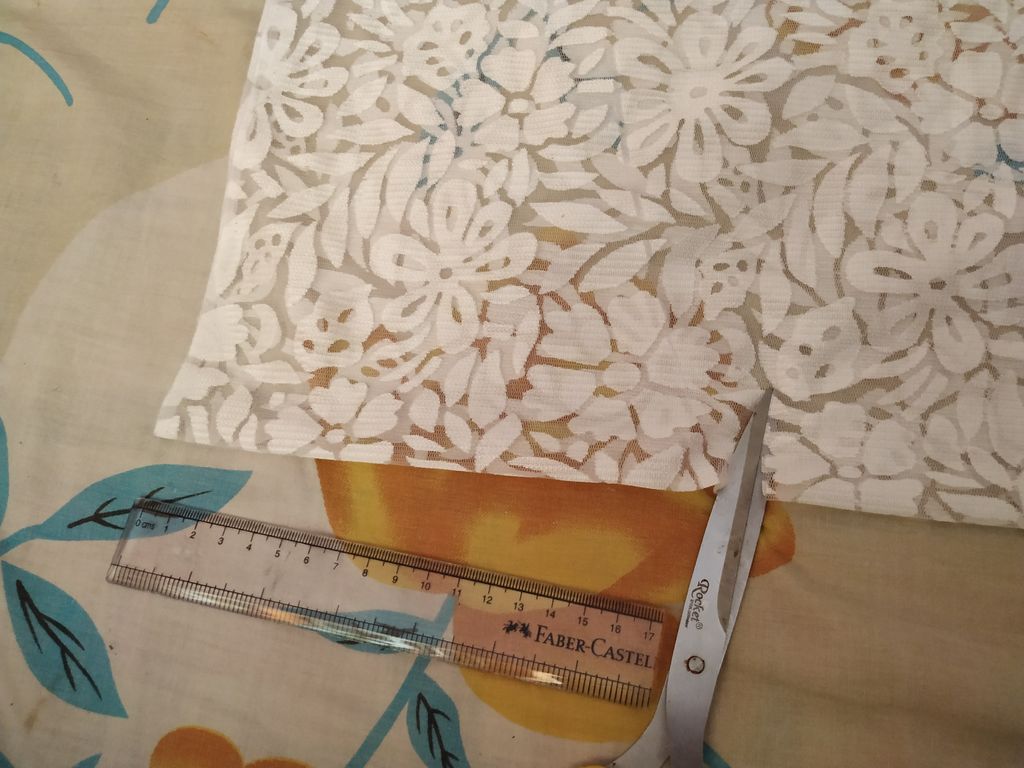
使用从当地商店购买的网布制作
将布料以圆形方式切割成连续的方式
第11步:绘画




使用合成涂料涂抹Skara
步骤12:Skara符号激光切割
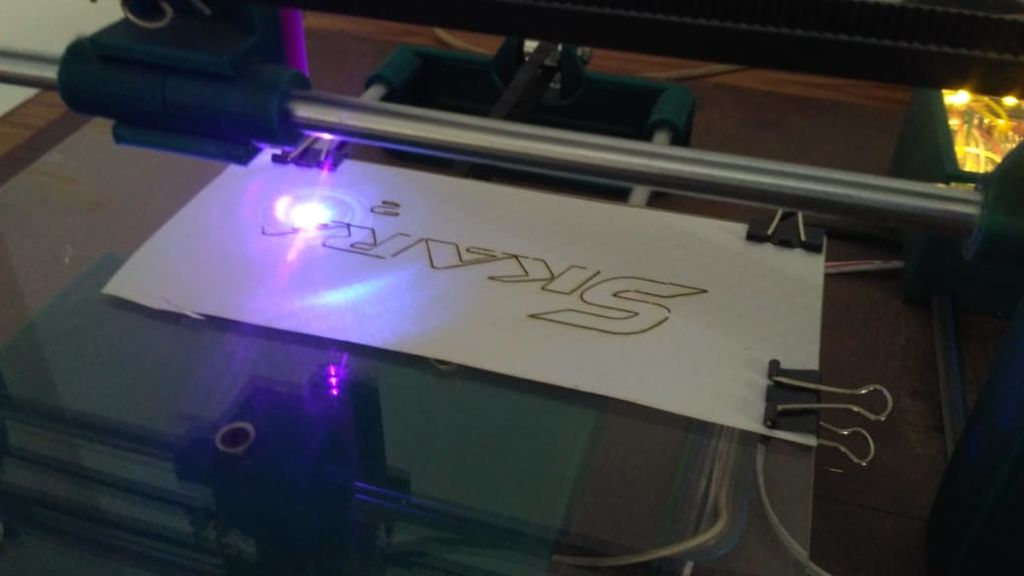



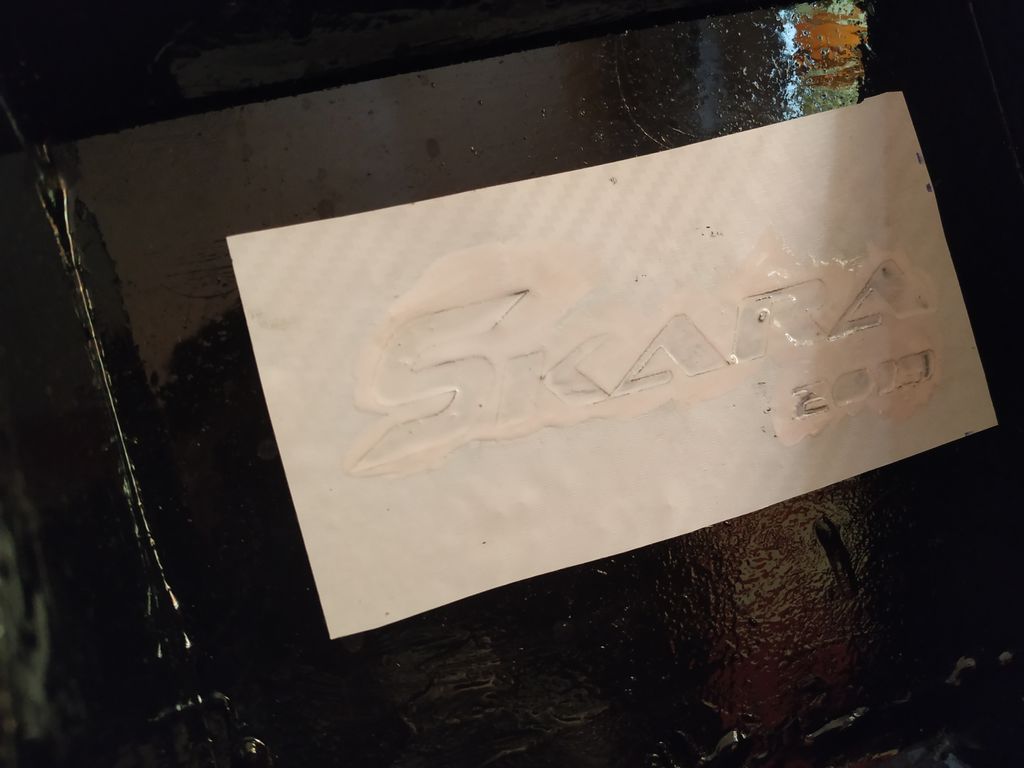

模具被切断使用我朋友制作的自制激光。
激光切割的材料是贴纸
步骤13:编码


预编码的东西:
对于这个项目,我使用Arduino IDE来编程我的NodeMCU。如果您之前已经使用过Arduino,那么这是更简单的方法,您不需要学习新的编程语言,例如Python或Lua。
如果您以前从未这样做过,首先您必须为Arduino软件添加ESP8266板支持。
免费下载,安装在您的计算机上并启动它。
Arduino IDE已经支持很多不同的主板:Arduino Nano,Mine,Uno,Mega,Yún等。不幸的是ESP8266默认不支持那些支持的开发板。因此,为了将您的代码上传到ESP8266基板,您必须首先将其属性添加到Arduino的软件中。
导航到文件》首选项(在Windows操作系统上按Ctrl +);将以下URL添加到Additional Boards Manager文本框(Preferences窗口底部的文本框)
如果文本框不是空白,则表示之前已经在Arduino IDE上添加了其他板。在上一个URL和上面的URL末尾添加一个逗号。
点击“确定”按钮并关闭首选项窗口。
导航工具》主板》主板管理器,添加ESP8266主板。
在搜索文本框中输入“ESP8266”,选择“ESP8266社区的esp8266”并安装它。
现在你的Arduino IDE将准备好与许多基于ESP8266的开发板一起工作,如通用ESP8266,NodeMcu(我在本教程中使用),Adafruit Huzzah,Sparkfun Thing,WeMos等。
在这个项目中,我使用了Blynk库。应手动安装Blynk库。
主要编码:
您必须更新Blynk身份验证密钥和您的WiFi凭据(ssid和密码)在上传代码之前。
下载下面提供的代码和库。
在Arduino IDE中打开提供的代码(“最终代码”)并将其上传到NodeMCU 。
智能手机的某些传感器也可以与Blynk一起使用。这次我想用它的加速度计来控制我的机器人。倾斜手机,机器人将向左/向右转动或向前/向后移动。
第14步:代码说明

在这个项目中,我只需要使用ESP8266和Blynk库。它们将添加到代码的开头。
您必须配置Blynk授权密钥和Wi-Fi凭据。通过这种方式,您的ESP8266将能够到达您的Wi-Fi路由器并等待来自Blynk服务器的命令。将“键入您自己的授权码”,XXXX和YYYY替换为您的身份验证密钥(您将通过电子邮件收到),您的Wi-Fi网络的SSID和密码。
定义连接到h桥的NodeMCU的引脚。您可以使用每个引脚的GPIO编号的文字值(D1,D2等)。
步骤15:设置Blynk
Blynk是一项旨在通过互联网连接远程控制硬件的服务。它使您可以轻松创建物联网小工具,并支持多种硬件,如Arduinos,ESP8266,Raspberry Pi等。
您可以使用它从Android或iOS智能手机发送数据(或平板电脑)到远程设备。例如,您还可以读取,存储和显示由harware传感器获取的数据。
Blynk App用于创建用户界面。它有各种各样的小部件:按钮,滑块,操纵杆,显示器等。用户可以将小部件拖放到仪表板,并为多个项目创建自定义图形界面。
它有一个‘能源的概念。用户从2000个自由能点开始。使用的每个小部件(在任何项目中)都会消耗一些能量,从而限制了项目中使用的最大小部件数量。例如,按钮消耗200个能量点。这样,人们可以创建一个最多包含10个按钮的界面。用户可以购买额外的能量点,并创建更复杂的界面和/或几个不同的项目。
Blynk App的命令通过互联网上传到Blynk服务器。另一个硬件(例如NodeMCU)使用Blynk Libraries从服务器读取这些命令并执行操作。硬件还可以向服务器提供一些数据,这些数据可能会显示在应用程序上。
安装应用并创建一个新帐户。之后,您将准备好创建您的第一个项目。您还需要安装Blynk库并获取身份验证代码。上一步描述了安装库的过程。
·BLYNK_WRITE(V0)函数用于读取加速度计值。 y轴上的加速度用于控制机器人是否应该向右/向左转,并且使用z轴加速度来查看机器人是否应该向前/向后移动。如果未超过阈值,则电机将停止。
在移动设备上下载blynk应用程序从Widget Box拖动加速度计对象并将其放在仪表板上。在按钮设置下,将虚拟引脚指定为输出。我使用虚拟引脚V0。你应该在Blynk App中获得Auth Token。
转到项目设置(螺母图标)。对于手动/自动按钮我在应用程序中使用了V1传送带我使用V2作为输出。
您可以在图片上看到最终应用的屏幕截图。
第16步:最终装配




我附上了所有部分
因此项目已完成
- 相关推荐
- 清洁机器人
-
12年中东游泳池及SPA展 王薇 ***2012-03-16 0
-
智能清洁机器人2013-11-08 0
-
庭院中修建游泳池的注意事项2017-01-20 0
-
游泳池水处理系统的PLC设计推荐2021-07-02 0
-
游泳池水处理系统的PLC该如何去设计呢2021-09-30 0
-
游泳池加热保温用板式换热器2009-12-28 779
-
紫外探头用于游泳池水中紫外消毒的应用2020-12-25 1063
-
使用Hexiwear监测游泳池的pH值和温度水平2022-12-27 288
-
电应普水下测距传感器赋予泳池清洁机器人智能感知2023-07-22 1118
-
EPSON爱普生助力智能泳池清洁机器人导航方案应用2023-12-26 705
-
游泳池水质监测物联网解决方案2024-03-11 460
-
爱普生陀螺仪模块助力智能泳池清洁机器人导航方案2024-04-01 785
-
EPSON助力智能泳池清洁机器人导航2024-04-08 416
-
泳池清洁机器人的EMC问题整改案例2024-06-24 1630
-
爱普生SGPM01助力智能泳池清洁机器人导航方案2024-09-04 293
全部0条评论

快来发表一下你的评论吧 !
