

绘图仪的制作教程
电子说
描述
步骤1:选择打字机
任何电子打字机都会这样做,我选择了带步进电机的Smith Corona,用于送纸,运输和菊花轮运动。我第一次打开旧的Olivetti,发现了直流电机和光学编码器。因为我在Arduino上运行GRBL,所以我需要步进器。可能有CNC软件允许使用直流电机,但我不知道。
第2步:车架分辨率
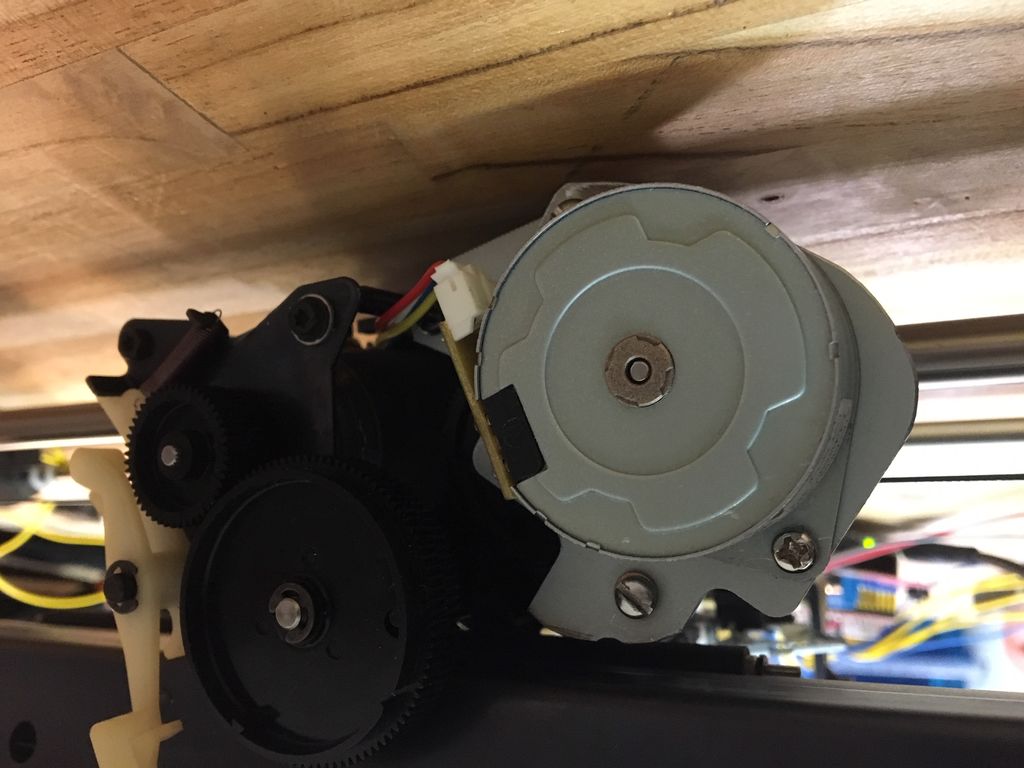
在我完成所有工作之后,我意识到马车没有足够的分辨率来制作漂亮的图纸。该机构被设计成大步移动,即在打字时。我几乎放弃了,因为我不知道如何解决这个问题。
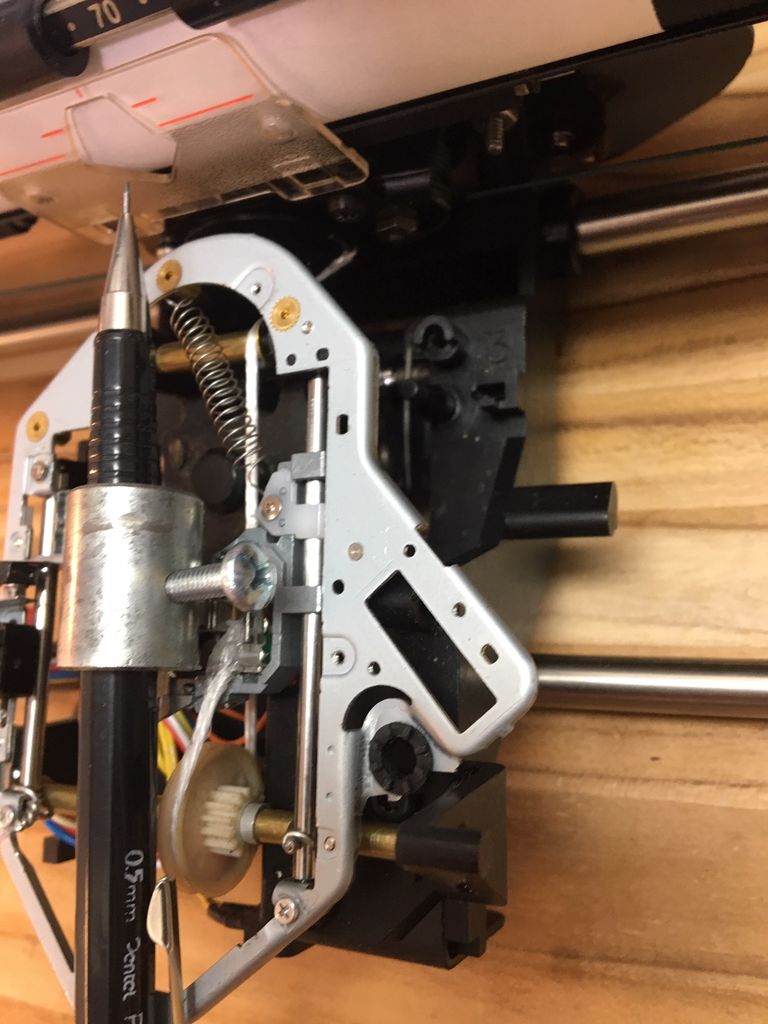
然后我找到了一个带有减速装置的小锡罐步进机,我从一台旧扫描仪上取下。我没有照片,但我所做的是将小齿轮从原装电机和胶水带到扫描仪组件的输出齿轮,实际上我只是添加了一些减速齿轮。
锡我的打字机上的步进器是7.5度,每转48步,不足以平滑绘图。
然而,纸张进给不需要任何模组,它移动得非常顺畅。
第3步:软件和硬件
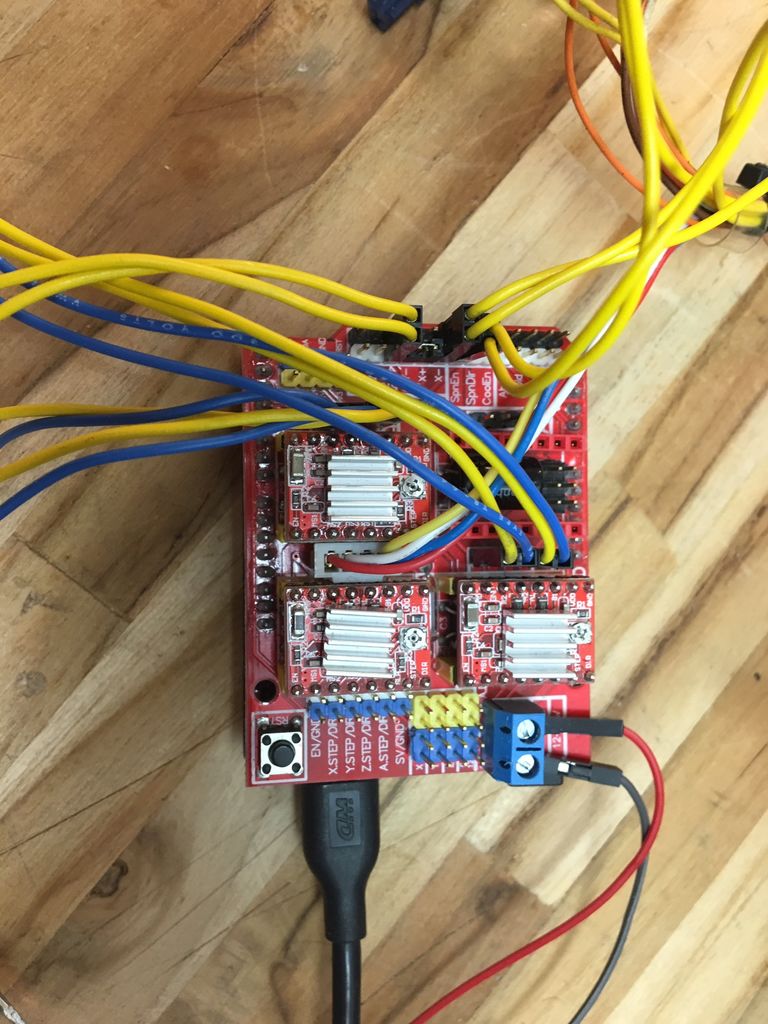
我是初学者所以我保持简单。
这是我使用的:
Arduino UNO运行标准GRBL(我认为版本为1,1g)。
带有A4988电机驱动器的CNC屏蔽。
12V电源
PC上运行的通用G代码发送器(UGS)平台。
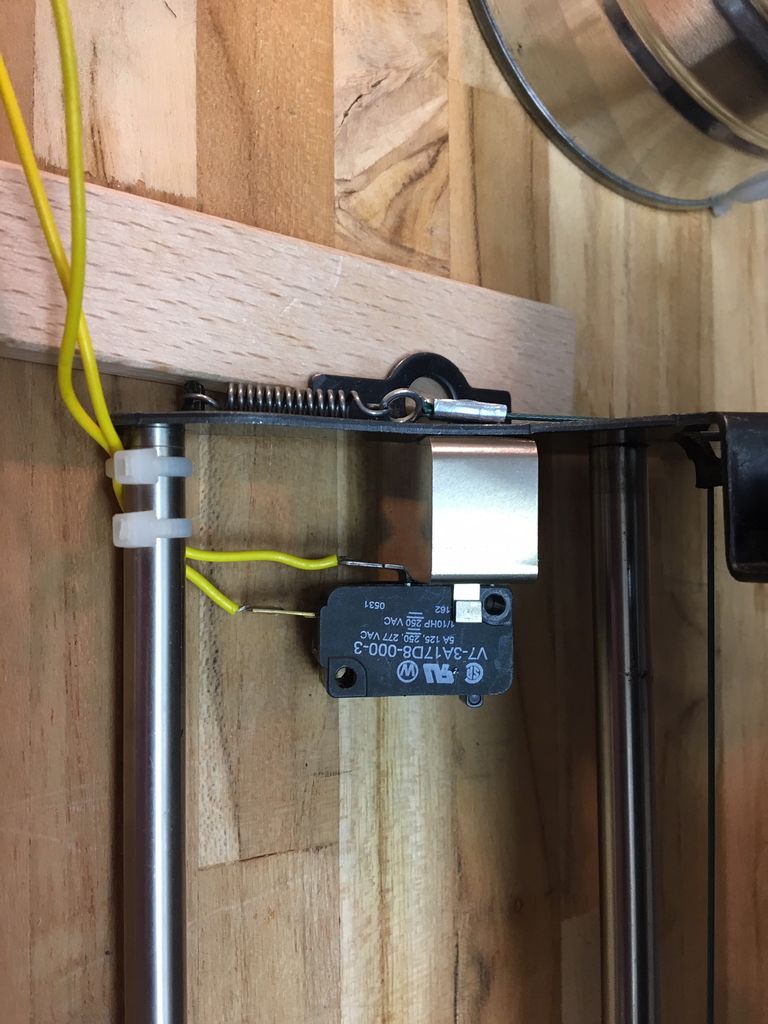
增加了一些限制开关以确保安全并能够使机器回家。
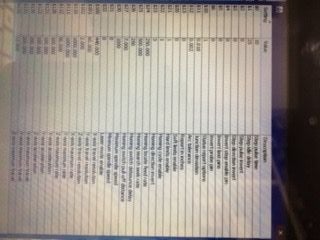
最后一张图显示了我通过UGS输入/更新的GRBL设置。
步骤4 :Z轴运动:笔向上/向下
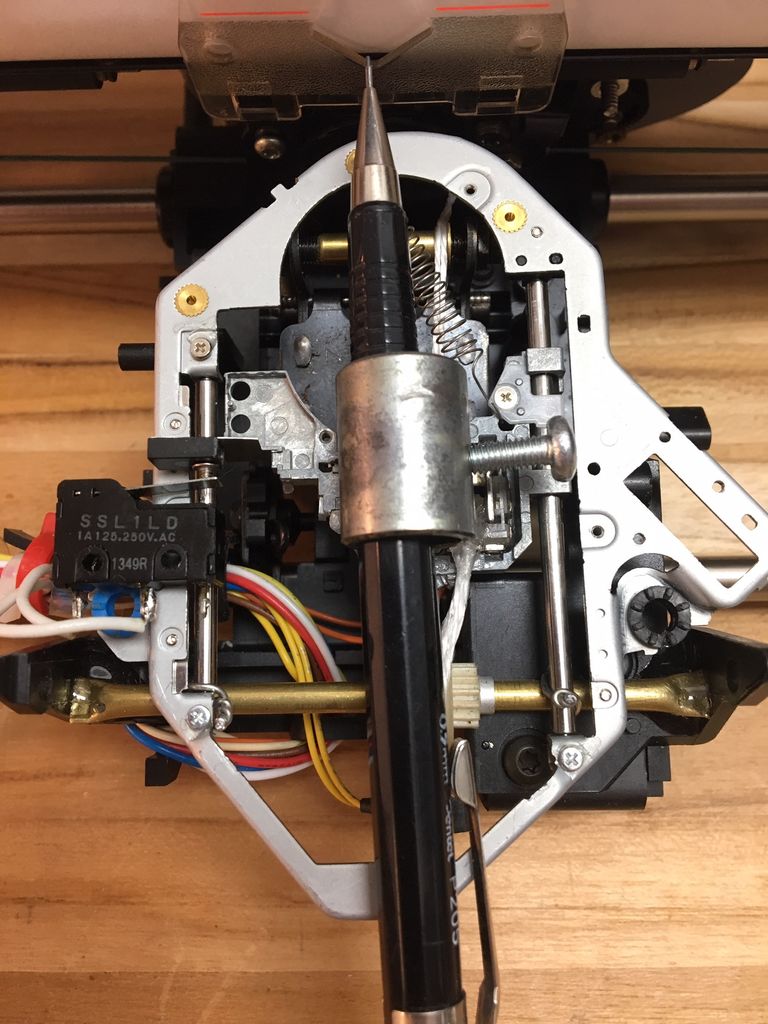
我拿了一个纤薄的DVD光盘,将所有东西拉开,只留下框架,导轨和金属片夹在激光器之间。
这些图片可以讲述比我可以。
这个字符串连接到一个最初驱动菊花轮的小磁盘上。我只是将琴弦连接到磁盘上,然后通过一个小滑轮连接到小笔架。这种电机有点用作伺服,即它前后移动大约90度,拉动和释放弦。
使用真正的伺服器要容易得多但是因为GRBL为步进器设置我只是觉得它更容易。
我调整了UGS软件的行程限制等,以便笔可以根据需要移动。小弹簧在笔上保持一定的张力。
- 相关推荐
- 热点推荐
- 打字机
-
令人惊叹的创意自动绘图仪 #科技小制作 #小发明 #diy #电子爱好者 #创客教育 #电子电工 #创意白加黑 2023-06-18
-
求一个基于单片机二维绘图仪的设计与制作的资源!!!2015-04-02 3975
-
HPdj 430绘图仪驱动程序 XP2014-12-29 626
-
基于tinyAVR和Nokia3310 LCD的温度绘图仪2017-01-13 822
-
如何构建一个低成本的Arduino MiniCNC绘图仪2022-05-12 4957
-
数控笔式绘图仪开源分享2022-10-19 713
-
XY绘图仪遇上缝纫机2022-10-24 722
-
如何使用DVD驱动器L293D制作迷你CNC 2D绘图仪2022-11-01 1144
-
基于Arduino的Mini CNC 2D绘图仪2022-11-04 898
-
PENXZYL Arduino画笔绘图仪开源2022-11-10 720
-
构建低成本Arduino Mini CNC绘图仪2022-11-17 1217
-
绘图仪开源项目2022-11-22 658
-
制作Arduino XY绘图仪绘图机器人极谱仪2022-11-29 1327
-
基于Arduino迷你CNC 2D绘图仪2023-06-26 650
-
FPV天线波束绘图仪构架2023-07-11 550
全部0条评论

快来发表一下你的评论吧 !
