

Arduino自动蜘蛛的制作
电子说
描述
步骤1:零件和工具
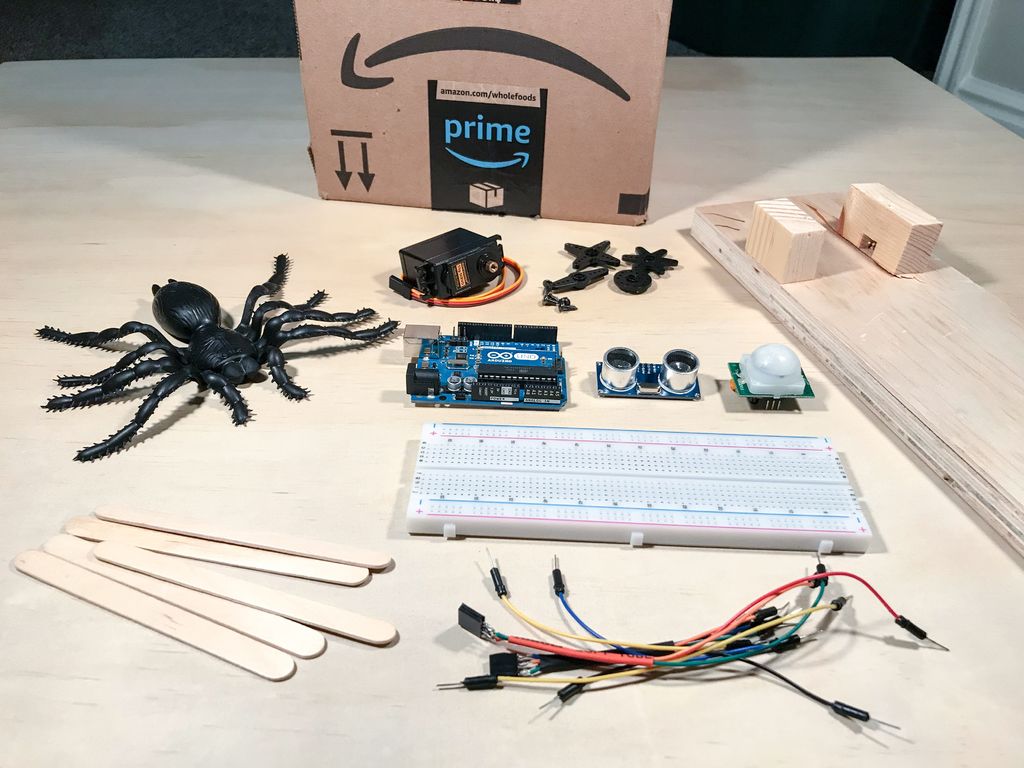
零件
假蜘蛛(美元店?)
Arduino
伺服 - 亚马逊/Aliexpress
A传感器(选择1 - 我在这个教学中显示两种方式)
超声波传感器 - 亚马逊/Aliexpress
PIR传感器 - 亚马逊/Aliexpress
面包板和跳线
冰棒棒
废木片
空包装箱
工具
刀具或刀具
胶枪
锯
木胶(或只是使用胶枪)
步骤2:测试伺服,超声波传感器和PIR传感器
首先要做的事情。如果你像我一样并且从未使用过伺服或这些传感器,你可能需要快速阅读一些教程来弄清楚它们是如何工作的。下面是我用来确保我的伺服和传感器工作并完成工作的每个概述和示例。我还包括了我可以使用的简化测试代码,以确保每个组件都有效。同样,您可以选择传感器类型(超声波或PIR)。
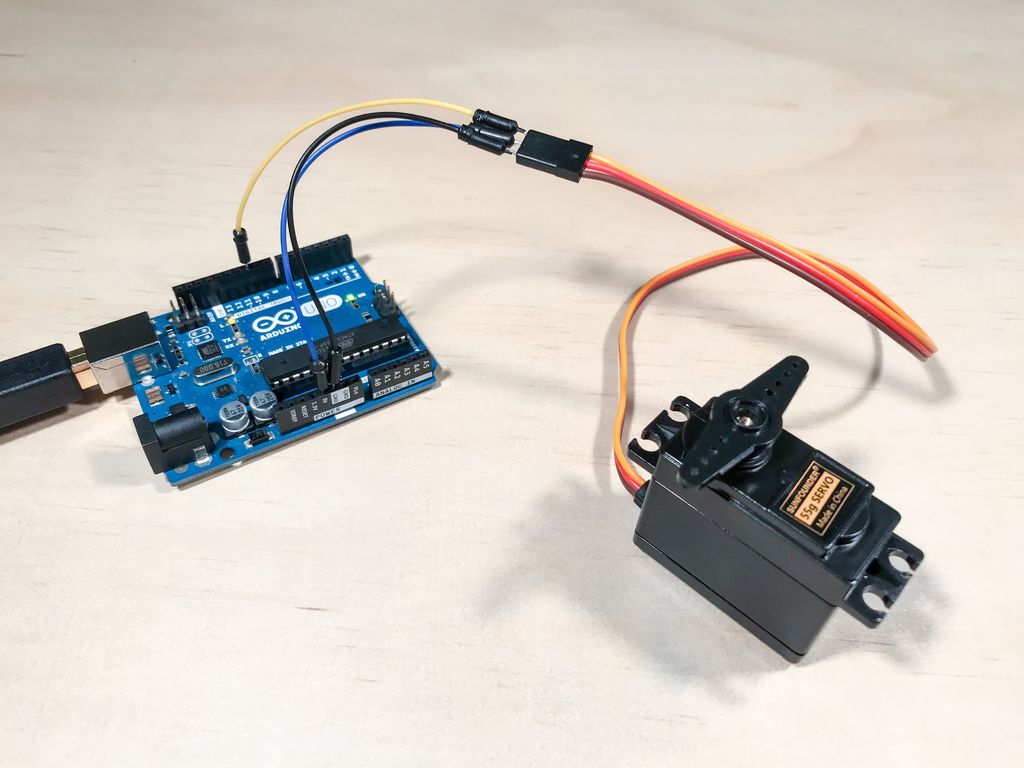
伺服
Sunfounder的基础伺服课程
Hobbytronics的示例代码
我的简化测试代码如下 - servo_test.ino
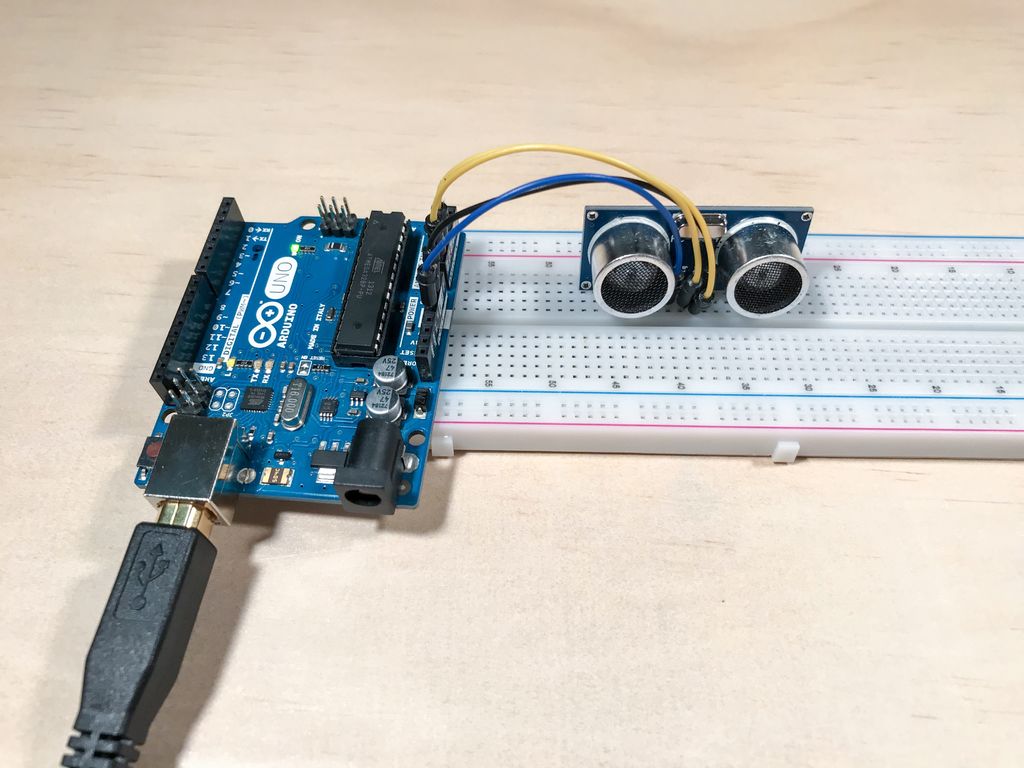
超声波传感器
如何在RandomNerdTutorials上运行
RandomNerdTutorials同一页面上的示例代码
下面的简化测试代码 - Ultrasonic_Distance_check.ino
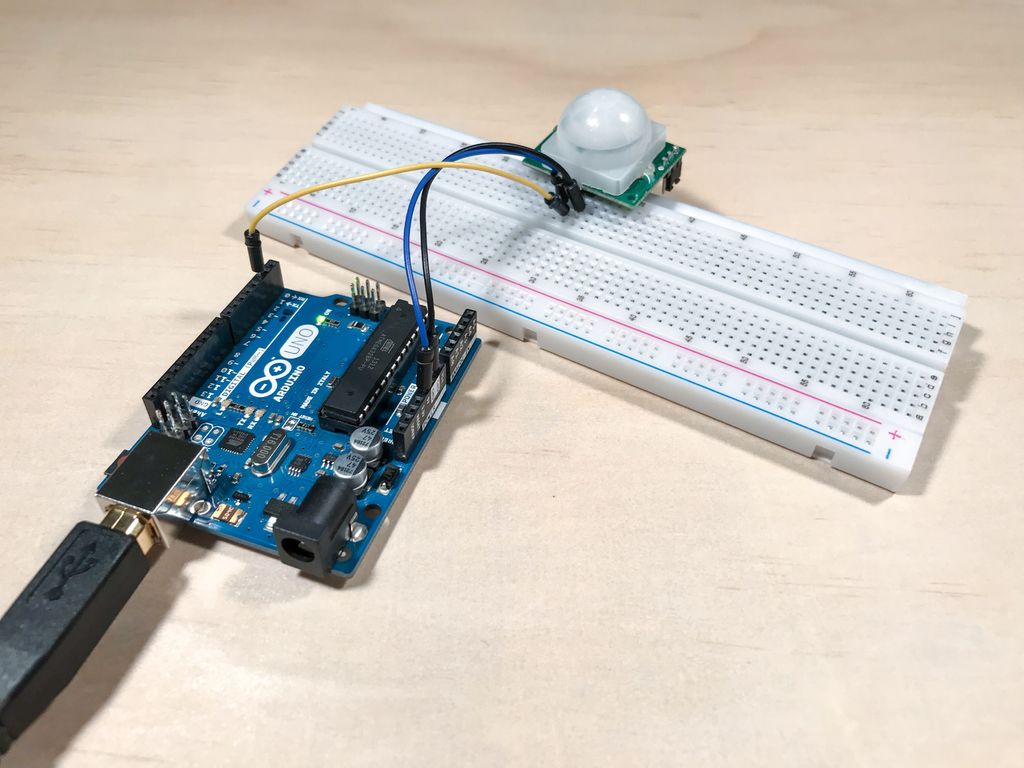
PIR传感器
PIR如何在Adafruit上工作
关于Adafruit的示例代码
我的简化测试代码如下 - PIR_Sensor_Test.ino
第3步:组合主体
接下来,根据您是选择PIR还是超声波路线,下面是组合蜘蛛代码,用于检测进入范围的人,然后转动伺服器以将蜘蛛移出和移回。使用跳线和面包板将传感器和伺服电路连接到Arduino,如下面的选项所示。
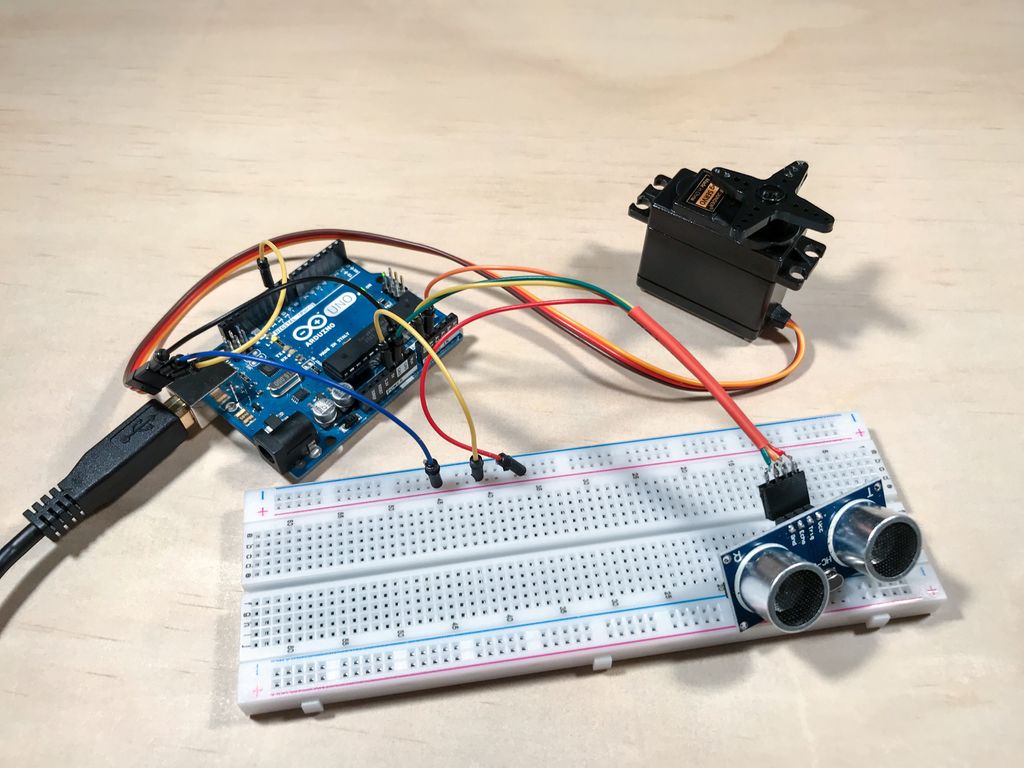
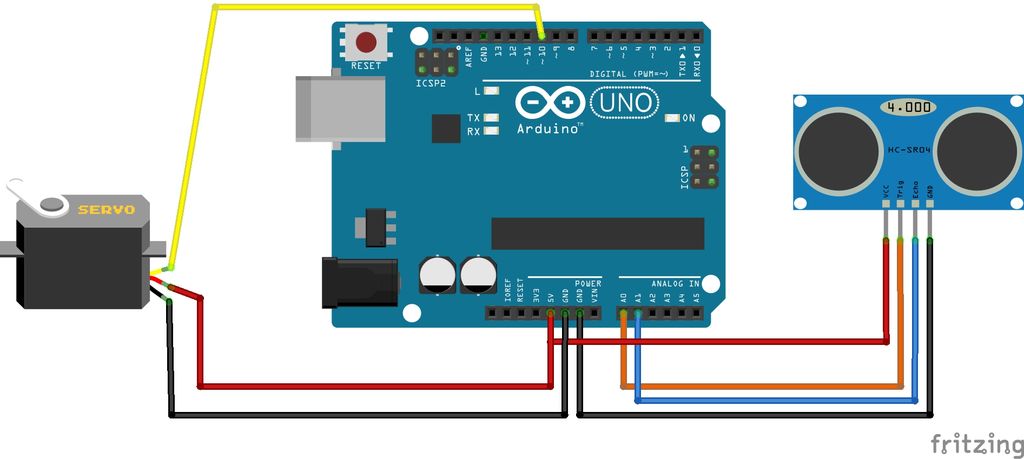
超声波选项
此代码检查如果物体在一定距离范围内并召唤蜘蛛。
在代码中,您可以将 triggerDistance 变量更改为接近或超过48英寸(4英尺),具体取决于您的具体情况。
将伺服连接到5v,Gnd和Pin 10
将超声波传感器连接到5v,Gnd,A0(Trig)和A1(Echo)
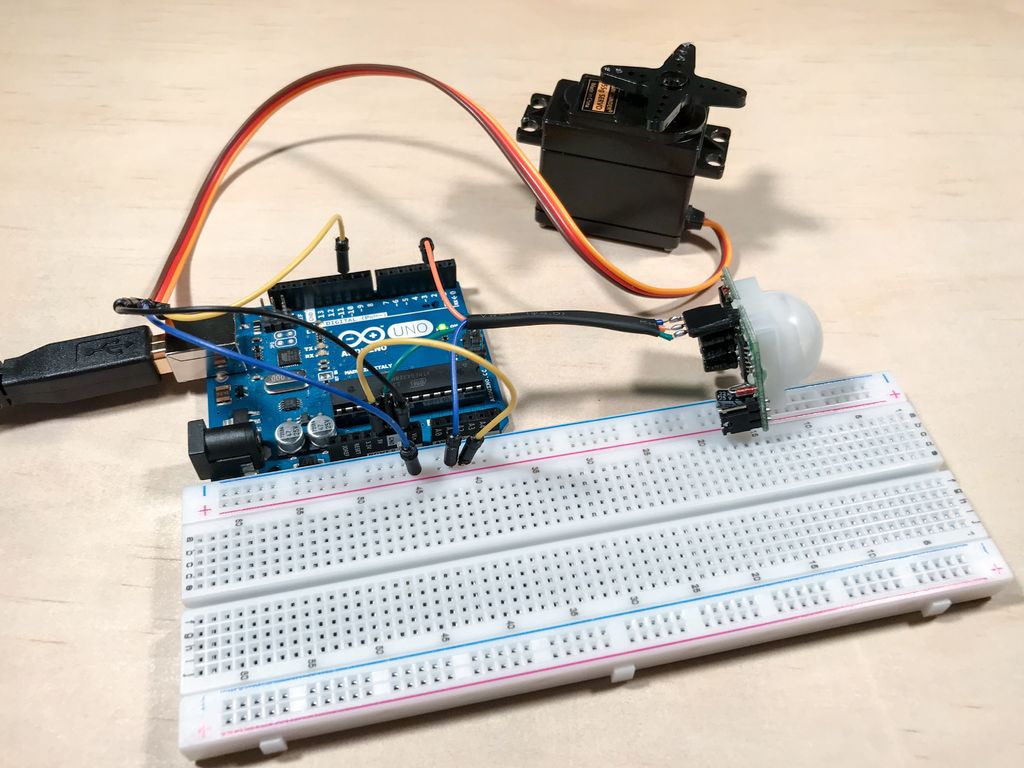
PIR选项
此代码检查对象是否在视野中并召唤蜘蛛。
对于PIR,您可以使用灵敏度电位计(通常为橙色)调整灵敏度,并向右旋转以获得最低灵敏度。
将伺服连接到5v,Gnd和Pin 10
将PIR传感器连接到5v,Gnd和Pin 2
连接后在这两个选项中,使用它来确保其正常工作,通过传感器触发伺服。
步骤4:为伺服创建基础
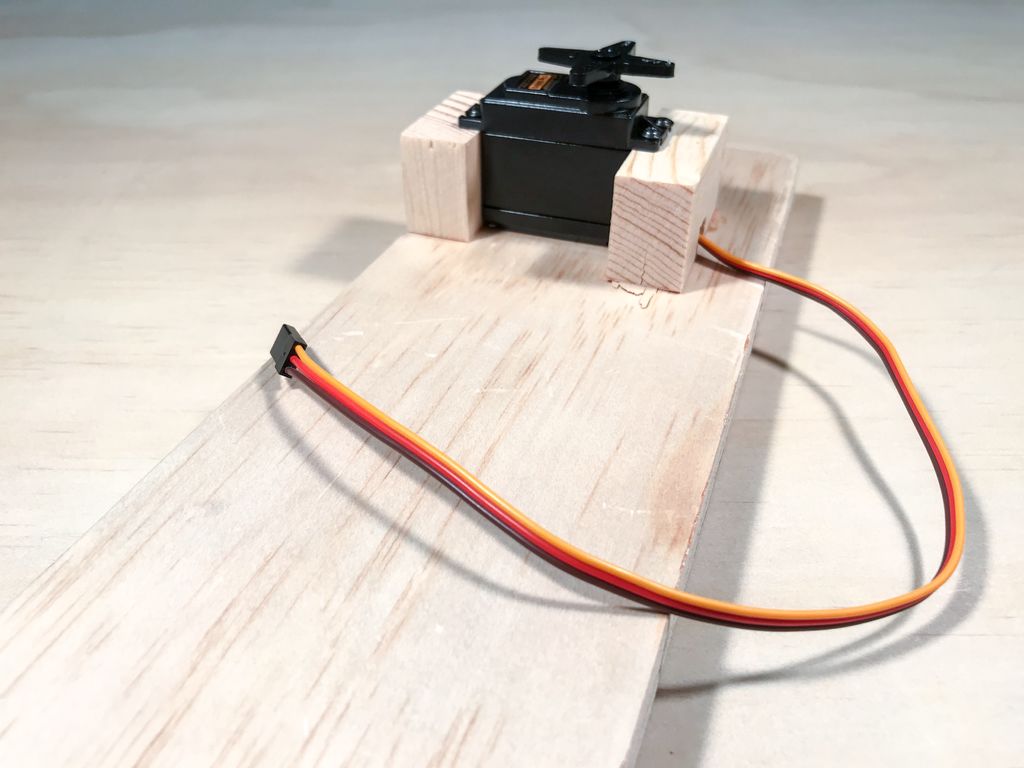

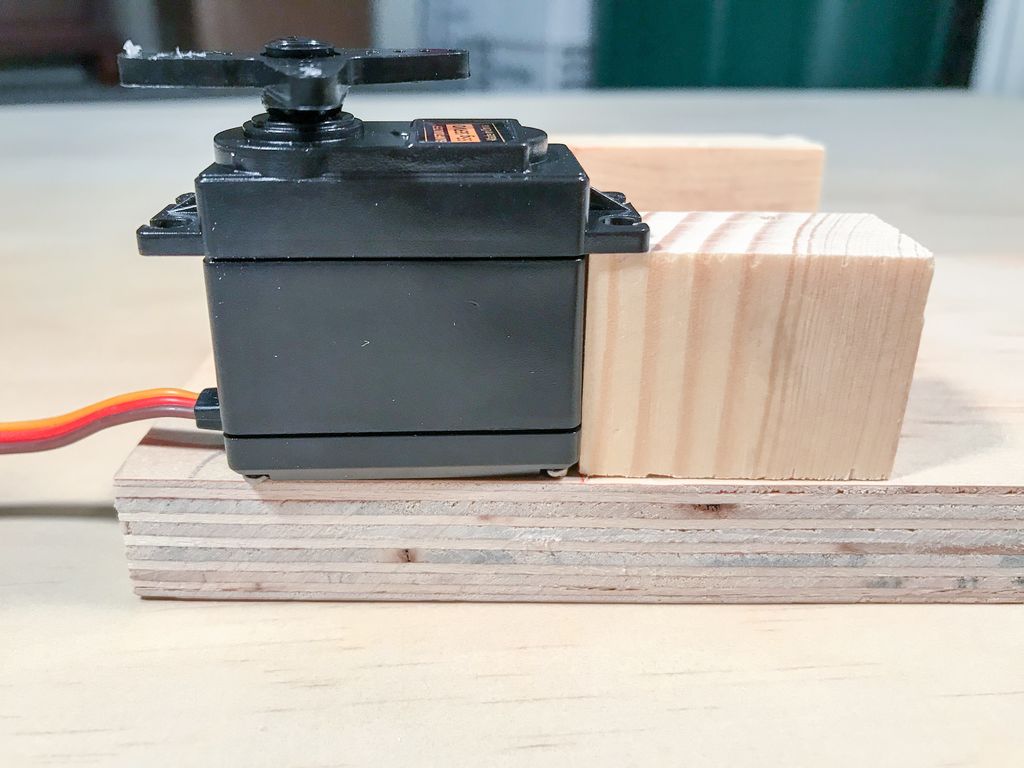
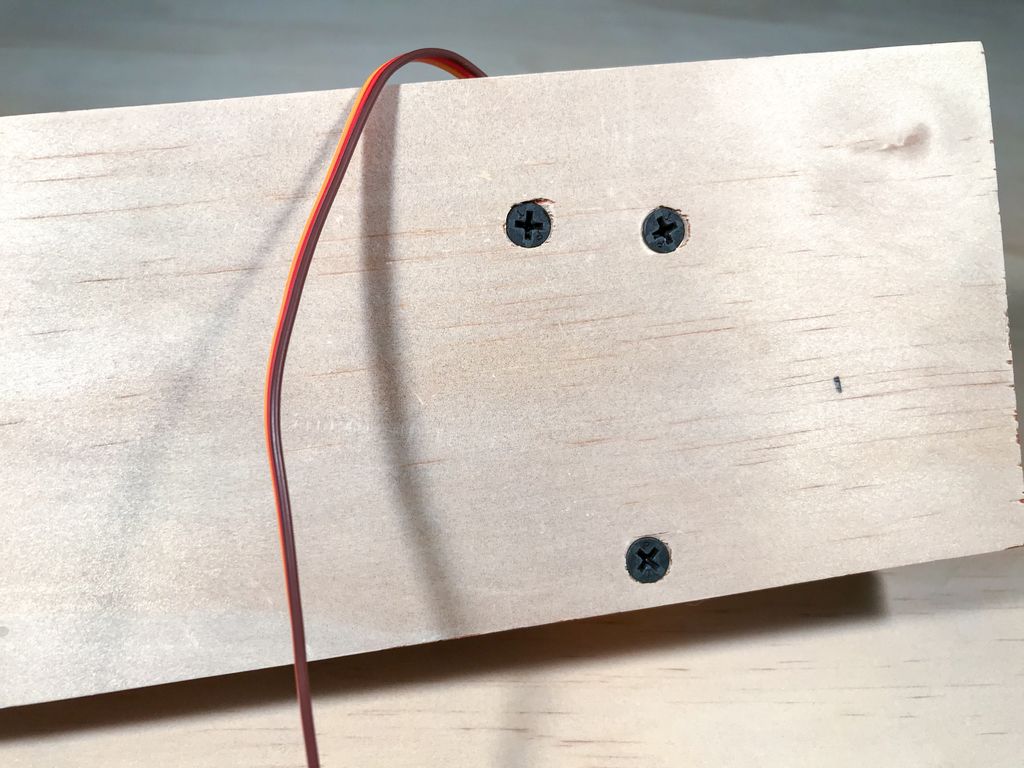
接下来,您需要安装伺服系统,以便在摆动蜘蛛的同时保持原位。为此,您将需要使用锯将一块废胶合板或木板切割成约4“x 12”左右。然后,取两个较小的1“x 2”木块并将其切割成伺服高度的大小。从底部或木胶(或胶枪)将两个块拧到一端的胶合板上,然后将伺服器拧入块之间。
*注意:我还从一个块的底部切出一个凹口,以便伺服电线通过。
步骤5:添加Spider


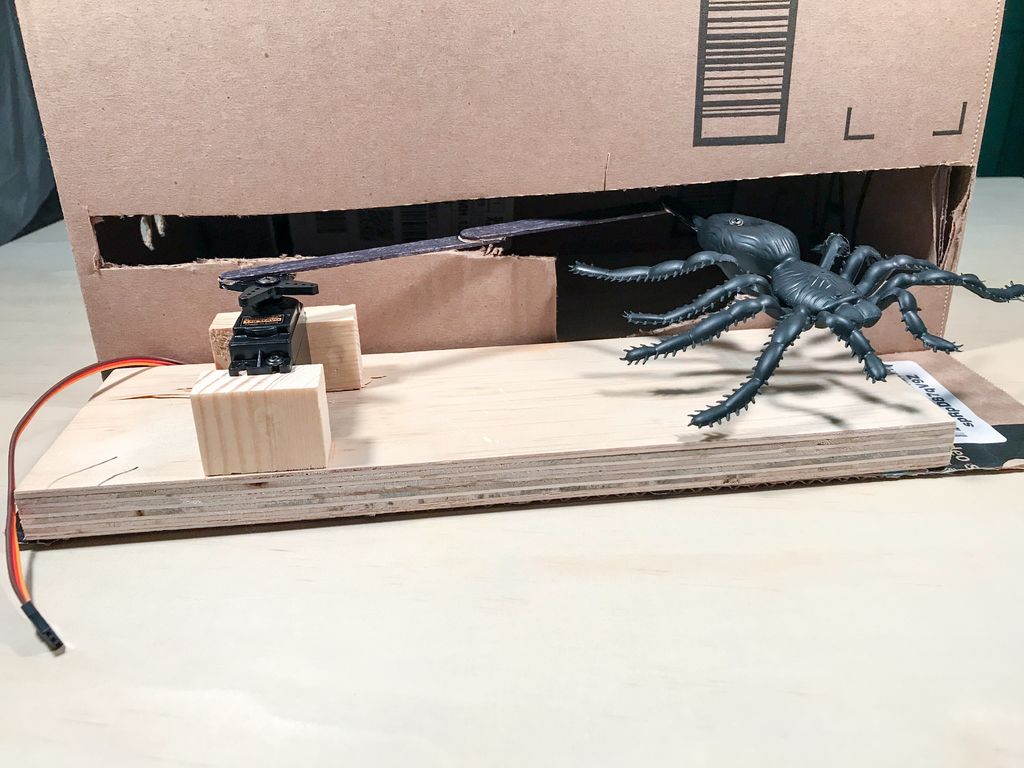
下一步是得到一只丑陋的蜘蛛(或其他生物 - 请不要生活,否则它可能自行移动)。轻量级是优选的,因此伺服不需要做太多工作。使用胶枪,将两根冰棒粘在一起,然后连接到伺服臂/喇叭,如图所示。 (您可能希望先用尖锐的颜色将冰棒棍颜色变黑,这样它们就不那么明显了。)然后使用伺服器附带的一个小螺丝将蜘蛛安装到另一根冰棒上。用一根棍棒将蜘蛛粘贴在冰棒棍臂的其余部分上,角度约为90度。
*注意:我刚刚将这些快速粘在上面,我没想到蜘蛛的高度离开了地面。您可能想尝试将木棍和蜘蛛角向下靠近地面,这样它看起来就像蜘蛛正好在地面上。
*注意:将这一切粘在一起之后,您可以拧下伺服手臂上有蜘蛛,将蜘蛛的起始位置与块的边缘对齐。
第6步:装运箱和完成工作

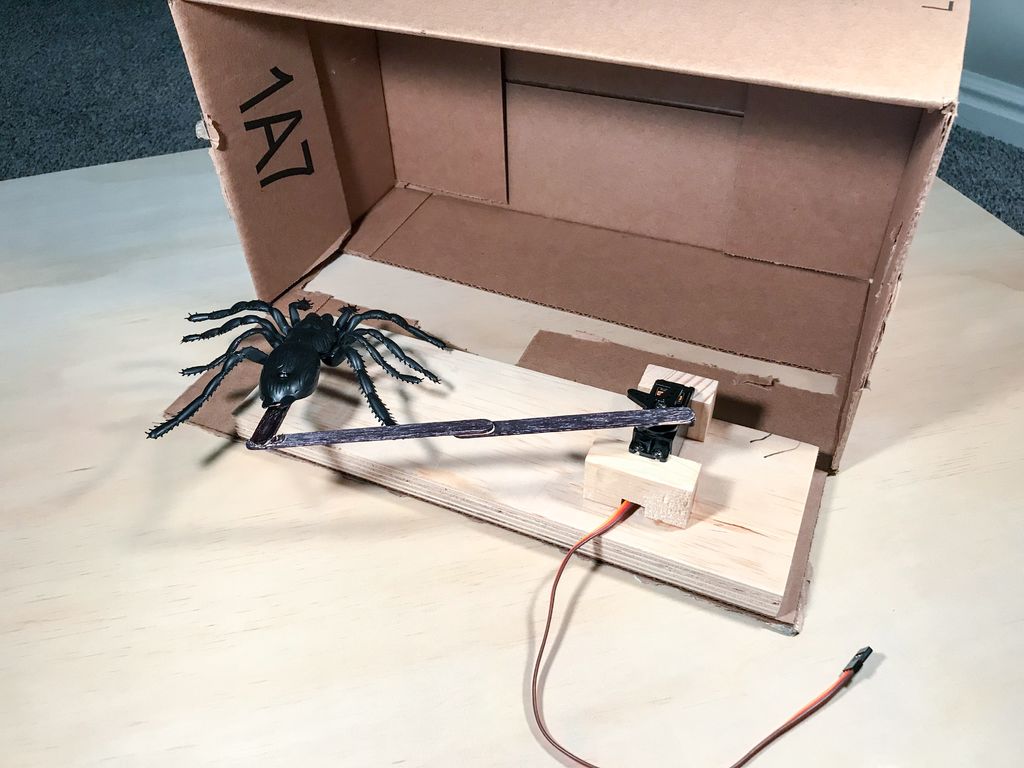

在测试了你的移动蜘蛛几次以感受手臂的路径后,找一个足够大的装运箱来装入底座和蜘蛛。
*注意:不要从盒子上取下襟翼,因为你会将底座粘在其中一个底部襟翼上。
设置盒子旁边的底座,估计然后用盒子刀切出手臂和区域的长度或蜘蛛从盒子里出来,如图所示。然后将底座粘在底部翻盖上,将盒子封在顶部,检查一下,当召唤时,手臂/蜘蛛是否可以自由地从盒子里出来。根据需要切割更多的盒子。
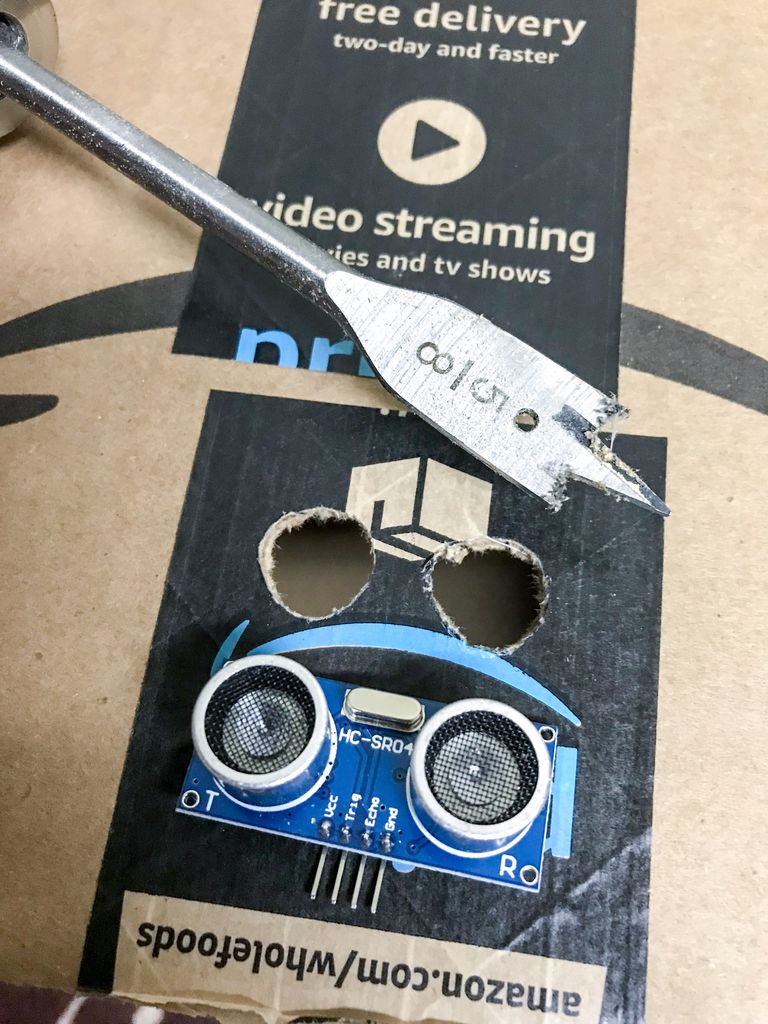
此时您需要确定放置传感器的位置。选项是在盒子前面切一个孔,或者将传感器放在盒子外面的某个位置。由于我的恶作剧是在前门阶段使用,照明不是最好的人看到传感器所以我只需用5/8钻头在盒子前面切孔并用胶水安装。
第7步:完成!


你们都已经完成了!将门闩设置在门廊上,就像它是一个交付的包装,然后插入或连接到USB电池组。让乐趣开始!!!
- 相关推荐
- 热点推荐
- Arduino
-
如何使用Arduino制作智能垃圾箱2024-02-11 5018
-
Arduino制作循迹小车教程2024-01-05 794
-
如何在家制作蜘蛛行走机器人2023-07-03 628
-
如何制作基于Arduino的自动开门2023-06-29 1216
-
带Arduino的四足蜘蛛机器人2023-02-08 2113
-
用Arduino制作游戏2023-01-31 748
-
Arduino如何制作智能按钮2022-11-09 1161
-
使用Arduino和i2c液晶显示器制作自动泊车系统2022-10-26 547
-
用Arduino板和LDR单元制作自动存在模拟器2022-10-20 754
-
基于Arduino制作蓝牙家庭自动化系统2022-07-08 2752
-
基于Arduino开发板和电磁阀的自动饮水机制作2021-01-13 9332
-
基于Arduino的趣味电子制作2018-06-26 2227
-
几个Arduino创意制作分享2017-10-16 2800
-
基于Arduino的触摸变色台灯制作2017-01-22 1383
全部0条评论

快来发表一下你的评论吧 !
