

机器人头盔的制作教程
电子说
描述
第1步:收集材料

技术资料:
4 x标准伺服
连接线
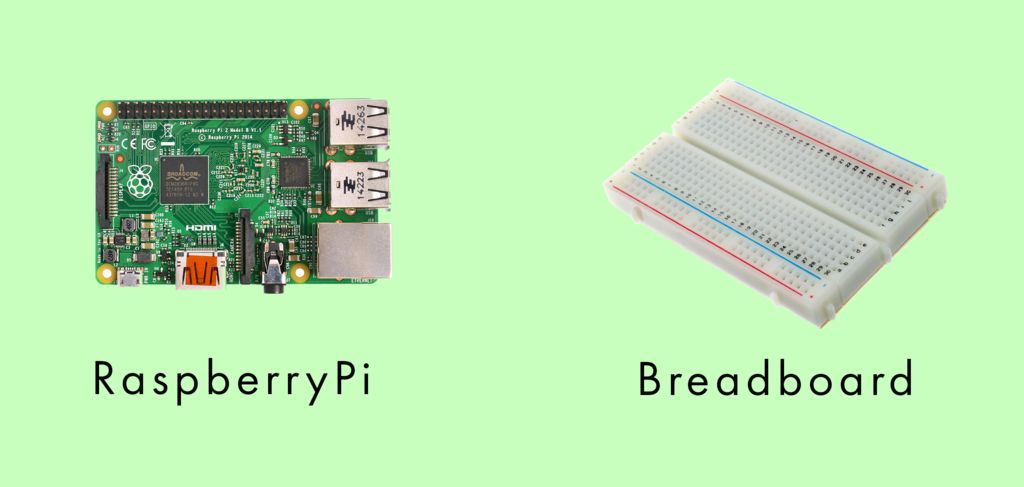
1 x迷你面包板
1 x Raspberry Pi
建筑材料:
激光切割亚克力部件
管道胶带
双面胶带
机器螺钉
电缆扎带
其他:
3 x 2.5“乘3”的亲人照片
1 x自行车头盔
2 x 9V电池
3 x 8“木钉杆
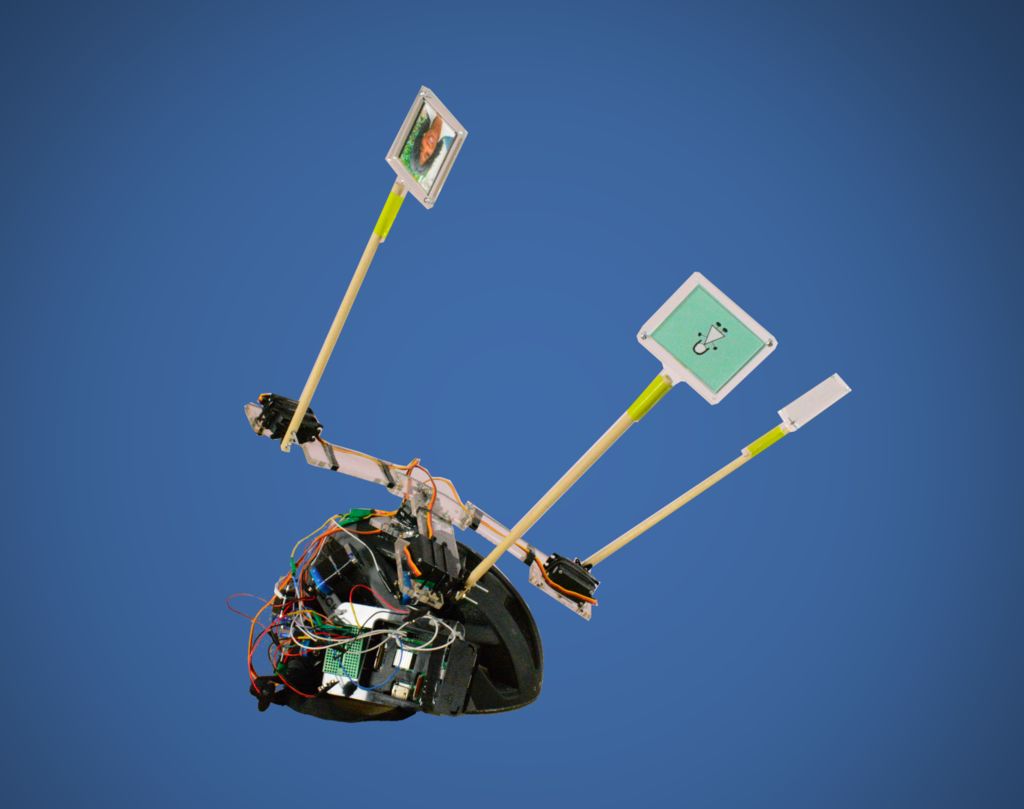
第2步:组装头盔
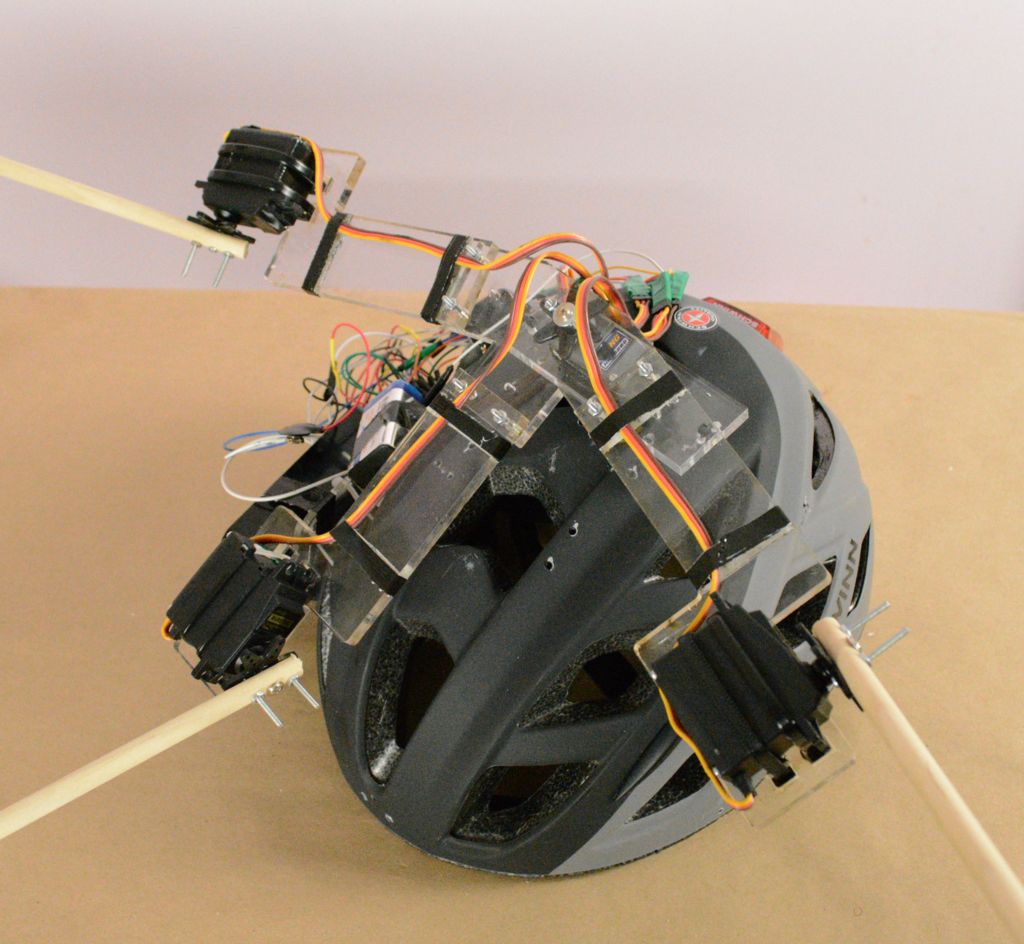




此机器人由两个主要组成零件:
旋转的照片架,可以将您所爱的人的照片移到您的面前。
允许您设置自定义主题标签的Twitter API代码从Twitter接收数据。
在这一步中,我们将组装位于头盔顶部的图片旋转机制。
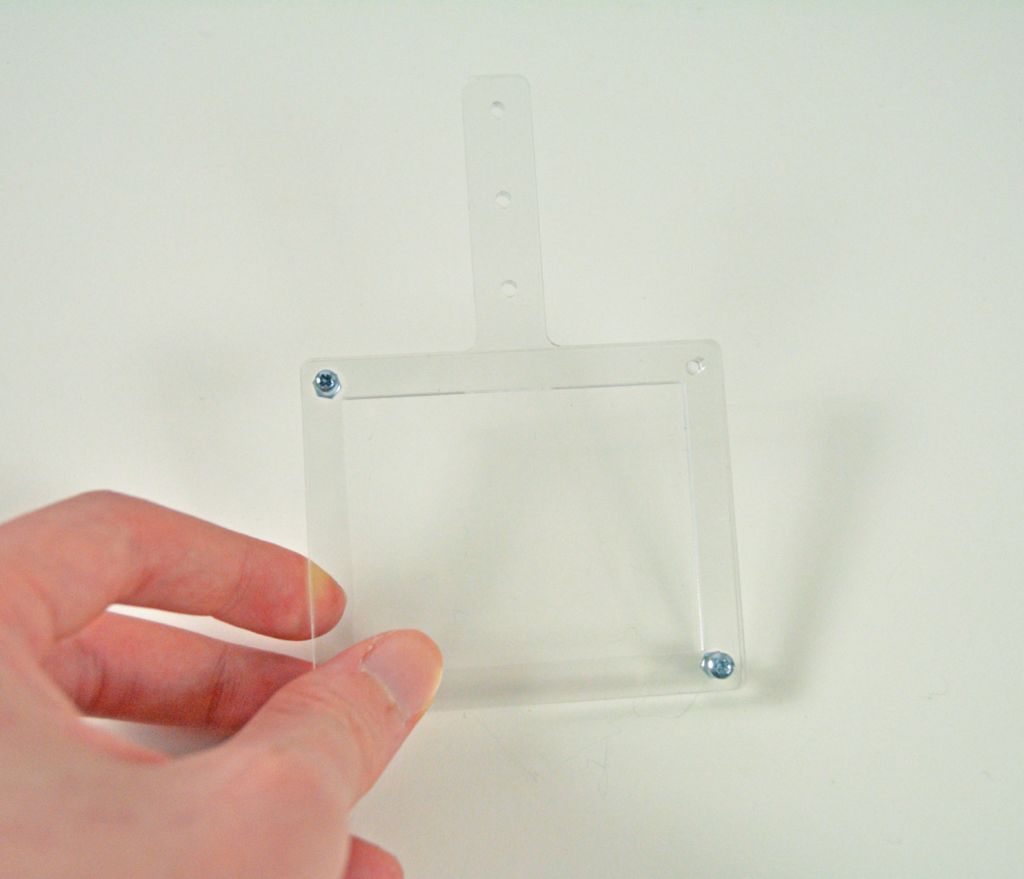
组装图片框架:
在.dxf文件中,“Lasercut Parts”,您将看到标有“相框”的矩形块。取下这些相框并使用它们把你的家人和朋友的照片夹在中间。这可以使用四个机器螺钉完成。
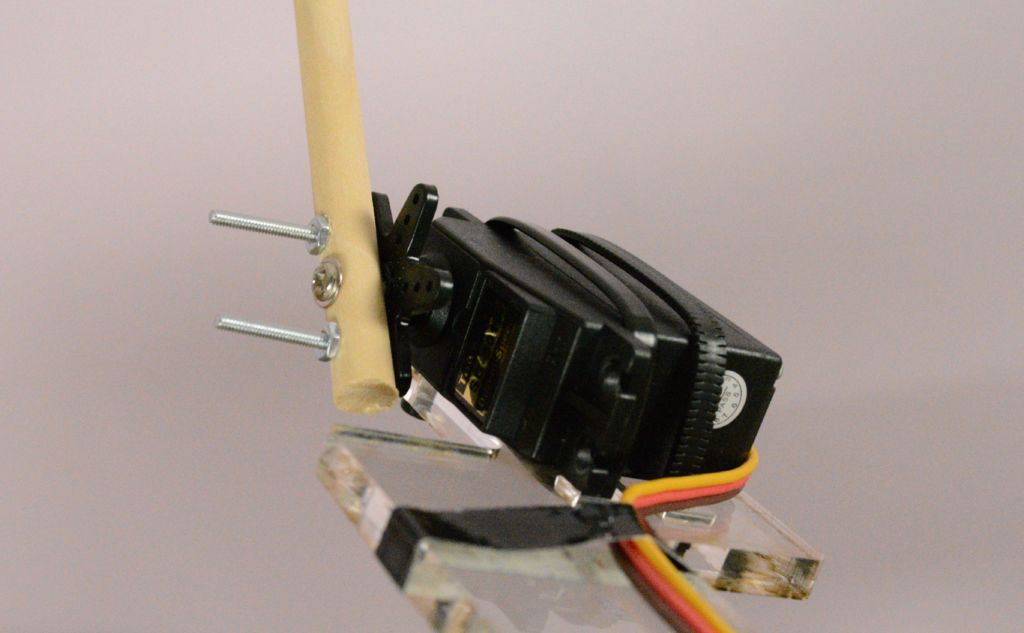
将图片放入框架后,取下3根木钉,然后用胶带将它们固定到框架上。完成此步骤后,您需要将每个销钉连接到头盔顶部的伺服电机上。这可以通过在销钉的非图片端钻孔并将它们连接到塑料伺服喇叭来完成。 注意:钻孔时,请确保相框朝向正确,让您在脸部前方移动时可以看到图像。
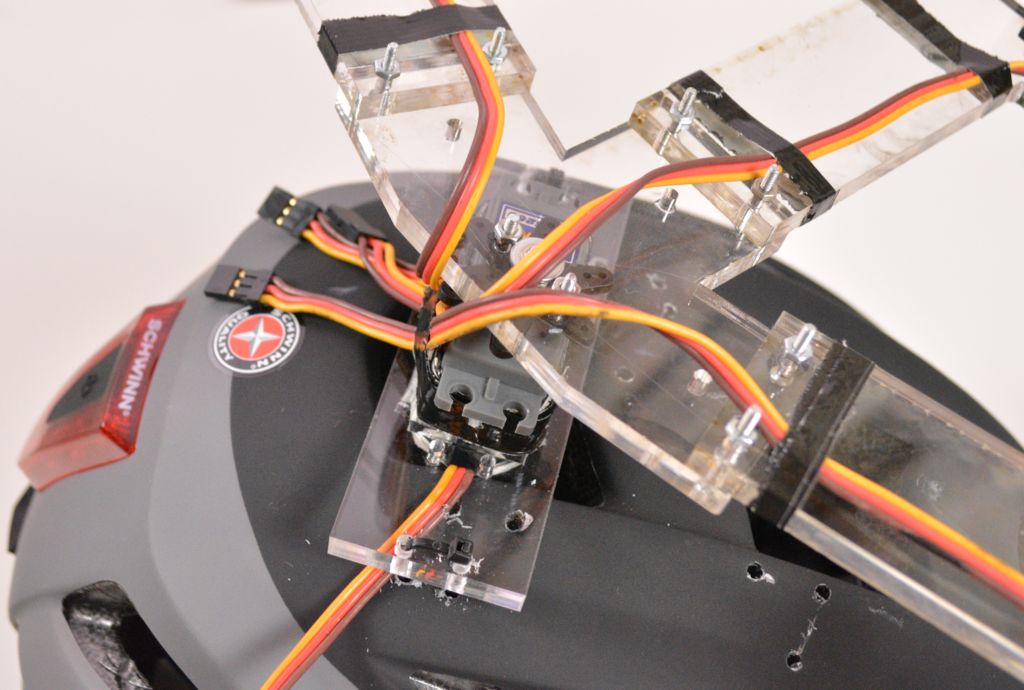
组装旋转平台:
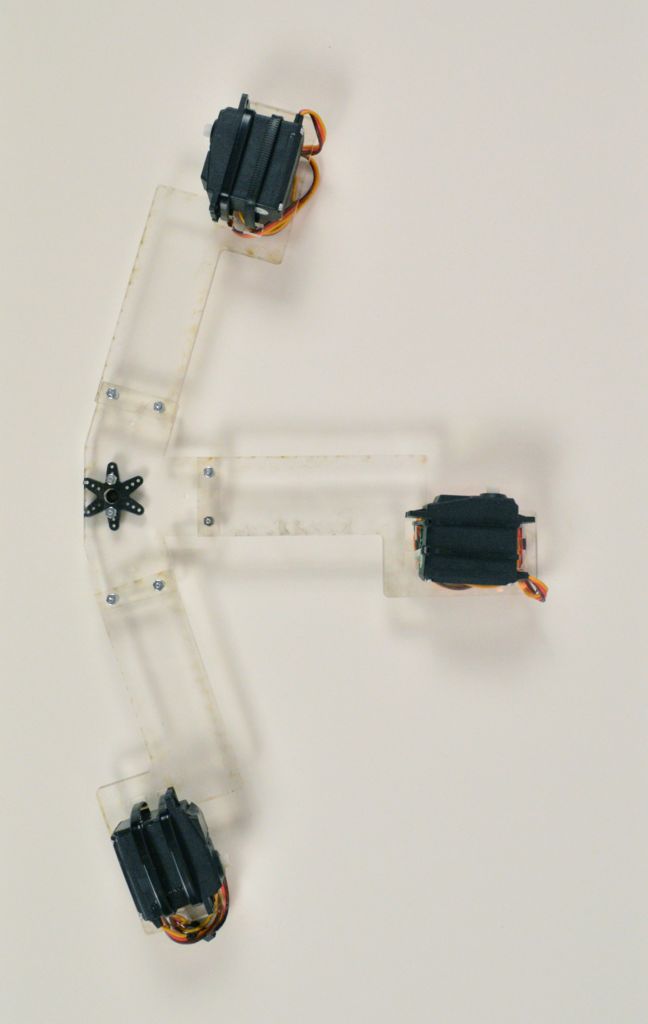
现在,我们将组装三臂旋转平台,该平台将位于头盔顶部并固定伺服器。
取下标有“旋转中心”的丙烯酸片,并使用“旋转中心”件末端的相应孔连接标有“伺服平台”的三个部件。
使用束线带将伺服器连接到“伺服平台”件。 请务必注意参考图像中伺服器的方向。
最后,使用塑料伺服喇叭将定位销杆连接到伺服器上在上一步中附上。
将Axis Servo连接到头盔:
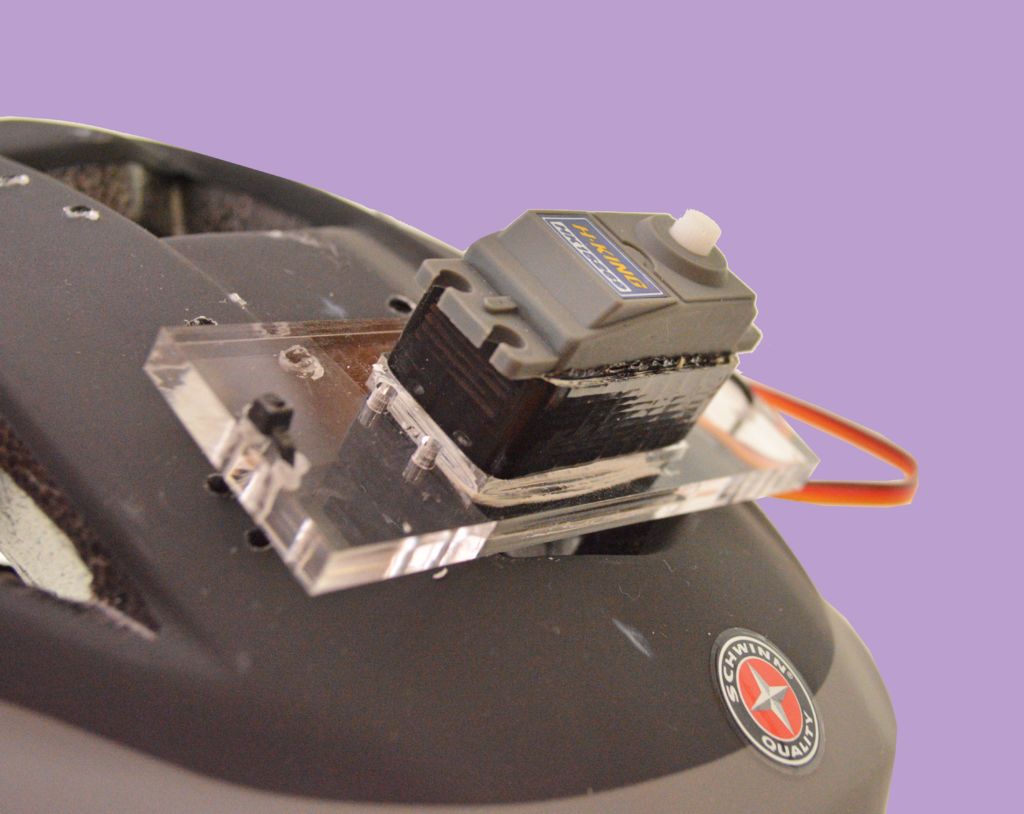
现在,我们将轴伺服系统连接到头盔顶部。考虑到每个头盔都不同,您需要找到一个位置来放置伺服器,使其直立。
将剩余的伺服器连接到标有“Axis Servo Holder”的部件上。/li》
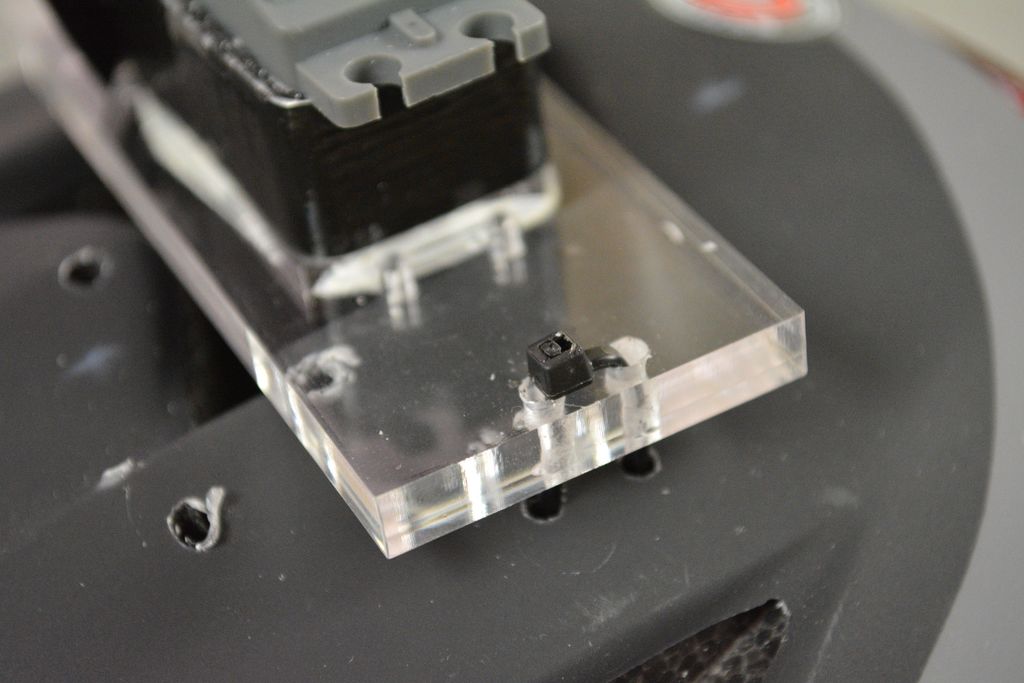
一旦你在头盔上找到一个允许伺服直立的位置,根据“Axis Servo”中的孔在头盔顶部钻四个孔支架,“并使用电缆扎带连接电机。
最后,将上一步组装的”旋转中心“连接到轴伺服。
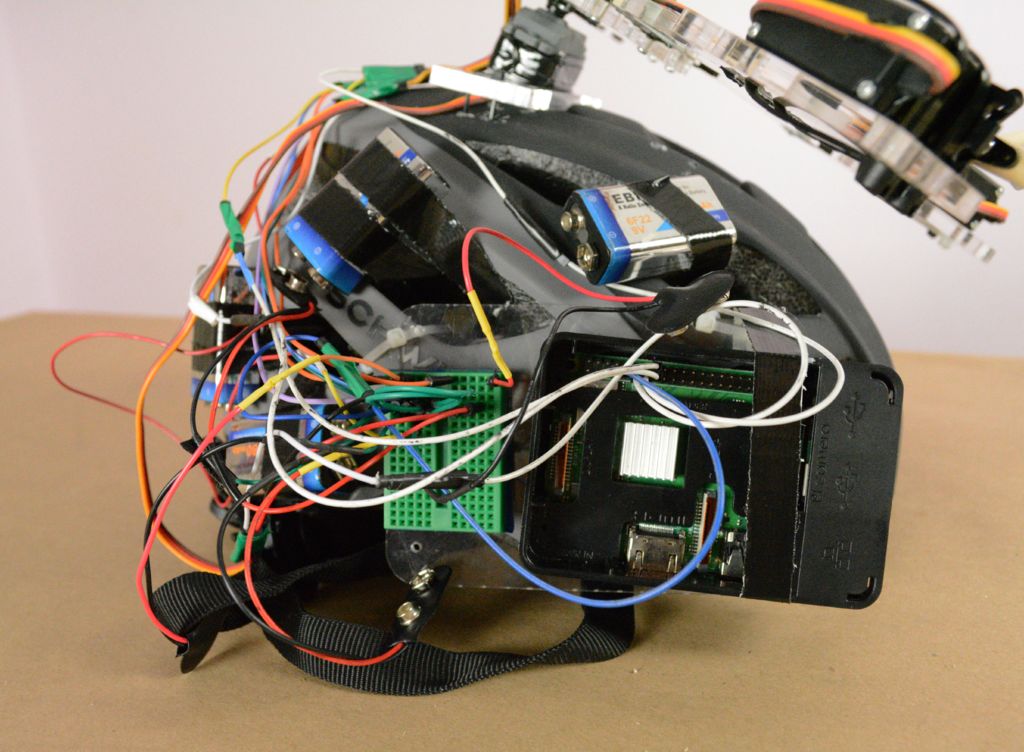
组装Raspberry Pi平台:
现在,您将把塑料“Raspberry Pi Holder”连接到头盔上。这样您就可以保持Pi和面包板的安全。与前一步骤一样,支架的确切位置取决于头盔上的空间大小。
将您的丙烯酸片标记为“Raspberry Pi Holder” “并且,使用两侧的孔,将它连接到头盔的侧面。
如上段所述,确切的位置取决于你,但确保支架不会干扰伺服电机的运动。
使用双面胶将面包板和Raspberry Pi连接到支架上。
第3步:接线
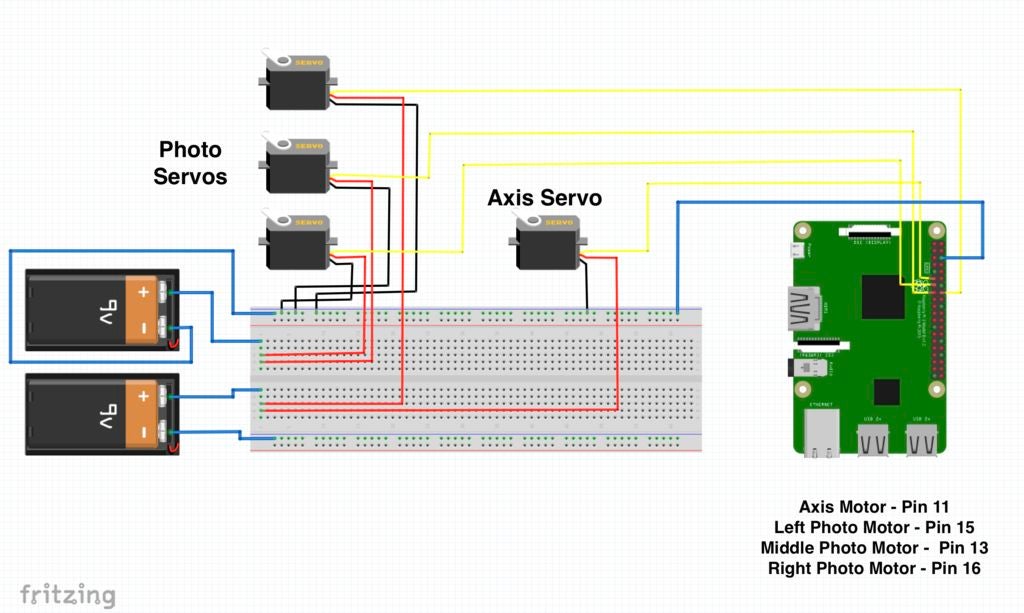
根据Fritzing图表,将电机连接到Raspberry Pi。一切都连接好后,确保使用电缆扎带组织电线。
步骤4:上传代码
为了从Twitter接收信息,你将需要从您的Twitter帐户生成访问令牌。如果您还没有生成这些令牌,请参阅指示链接。
生成访问令牌后,打开标有“twittercredentials.py”的文件,将您的信息复制并粘贴到相应的行。确保在完成此操作后保存代码。
接下来,打开文件“HelmetCode.py”并转到第94行。在这里,您可以插入自定义主题标签,因此每当您指定的一个主题标签被推文时,头盔都会响应。
注意:一定要运行您的代码在终端
第5步:完成笔记
如果你想要这个头盔便携式,你可以使用便携式手机充电器为你的Raspberry Pi供电。
尽管这个机器人实际上是一个头盔,但是不要让电源进入你的头。形象和字面意思(双重检查电线连接)。
-
DIY会说话的人形机器人头2023-06-16 714
-
机器人创新制作2020-05-16 3175
-
智能小车机器人制作大全2019-05-05 9551
-
KUKA机器人头发修复手术再进一步2018-11-26 4164
-
Arduino机器人制作指南2017-06-14 4491
-
扫地机器人怎么制作2017-01-12 7679
-
自律型机器人制作入门.基于Arduino2016-06-23 5396
-
循线音乐百灵鸟机器人--鸥鹏机器人制作2016-03-30 3426
-
分享 OHM 自律型机器人制作2013-05-06 16914
-
机器人竞技系列之机器人制作宝典2012-08-15 4478
-
智能电子创新制作-机器人制作入门2012-08-14 28723
-
机器人制作宝典2012-06-09 10745
-
机器人制作资料宝典【日本顶尖机器人设计师经典教材】2012-01-10 152984
全部0条评论

快来发表一下你的评论吧 !
