

海龟机器人DIY图解
电子说
描述
第1步:零件


DFRobot提供了主要组件。以下是我们正在使用的:
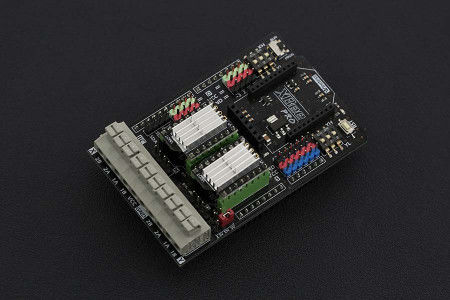
1 ea。,Bluno M0主板,SKU:DFR0416或常规Arduino Uno
1 ea。,双双极步进电机护罩Arduino(DRV8825),SKU:DRI0023
2 ea。,混合式步进电机,SKU:FIT0278
1 ea。,5mm橡胶轮耦合套件(对),SKU:FIT0387
1 ea。,9G伺服SKU:SER0006
对于电源,我打算使用18650锂电池,所以我买了:
3 ea。,EBL 18650电池3.7V
1 ea。,KINDEN 18650智能电池充电器
3 ea。,18650电池座
我还使用了一些不同的硬件:
2 ea。,Buna-N Rubber#343 O-Ring(3/16“x 3-3/4”ID)
1 ea。,1“低碳钢球轴承
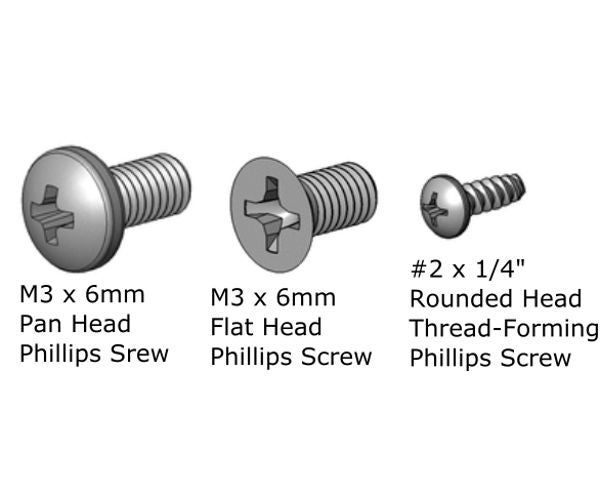
10 ea。,M3x6MM盘头螺钉
2 ea。,M3x8MM盘头螺钉
4 ea。,M3x6MM平头螺钉
14 ea。,M3螺母
4 ea。,#2 x 1/4螺纹成型螺钉
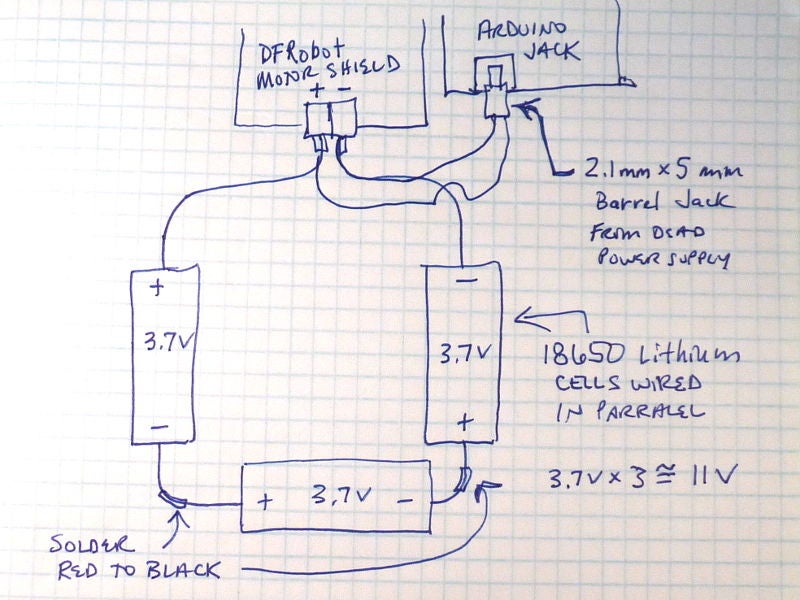
我们还需要一种创造性的方式来分享Motor Shield和Arduino之间的电池电量似乎没有适应性。我使用了一个死电源的2.1毫米x 5毫米枪管插孔,或类似的东西。
工具:
菲利普斯螺丝刀
剥线钳
热胶枪(可选)
烙铁和焊料
其中最重要的是:
耐心
持久性
积极态度
第2步:3D部件
我决定尝试在FreeCad中为这个机器人设计所有3D以帮助我学习。我需要做的就是传输伺服和笔排列的尺寸,然后将其余部分调整到适合更大的步进器。
更大的轮子为电池提供间隙。
更厚的底盘为增加重量提供强度。
较大的脚轮与升高的甲板高度相匹配。
模块化,便于测试和定制。
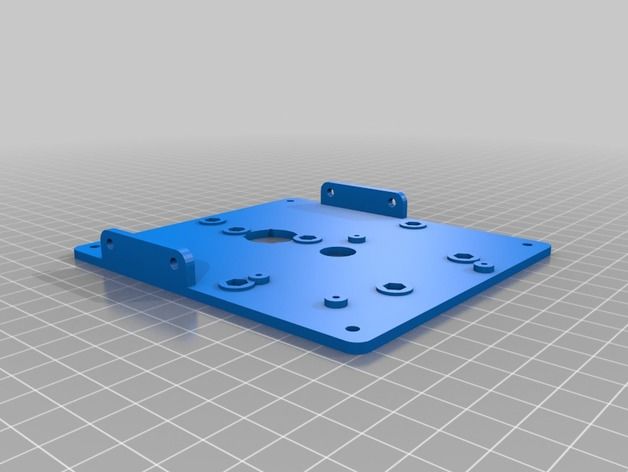
以下是您需要的部分。所有文件都位于https://www.thingiverse.com/thing:2976527
1 ea。,chassis
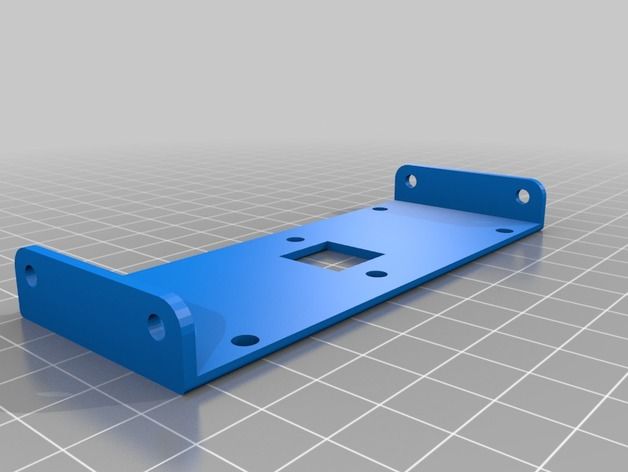
1 ea。,top strut
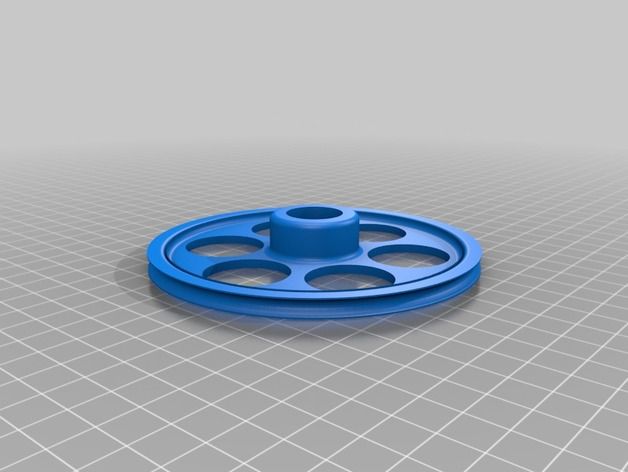
2 ea。,wheel
1 ea。,barrel
1 ea。,伺服支架
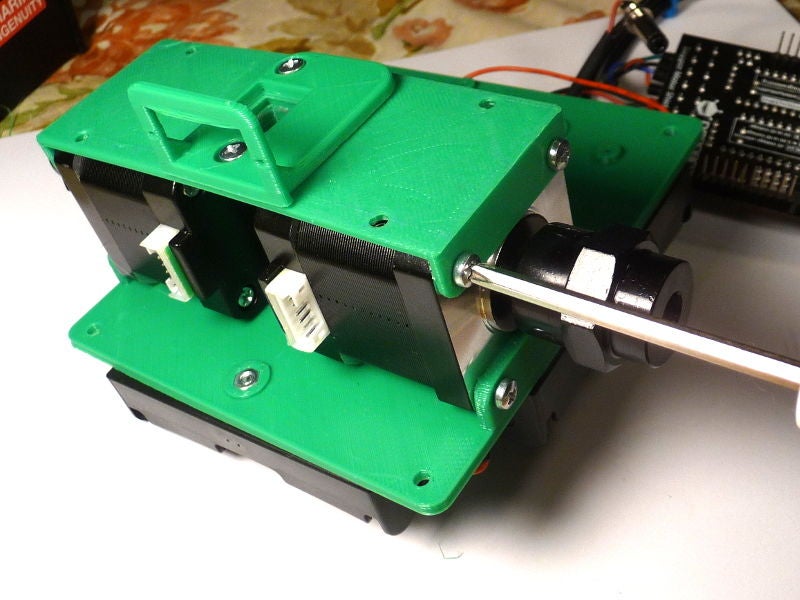
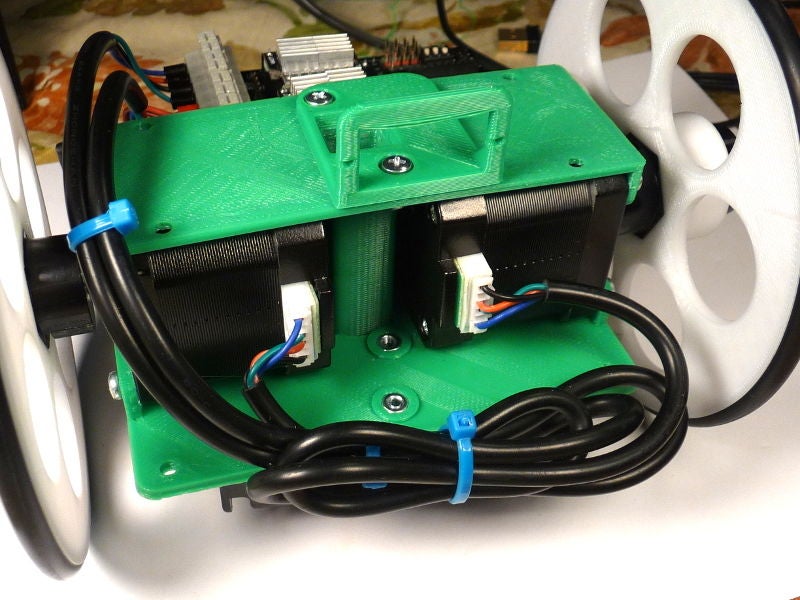
第3步:机箱组件第1部分
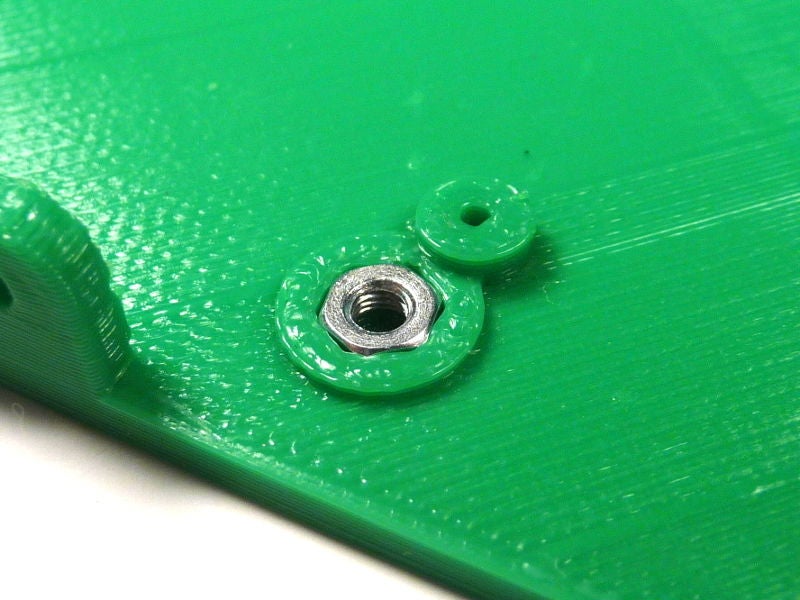
首先在机箱支架中插入M3螺母。它们既可以压入,也可以用M3螺丝拉入。
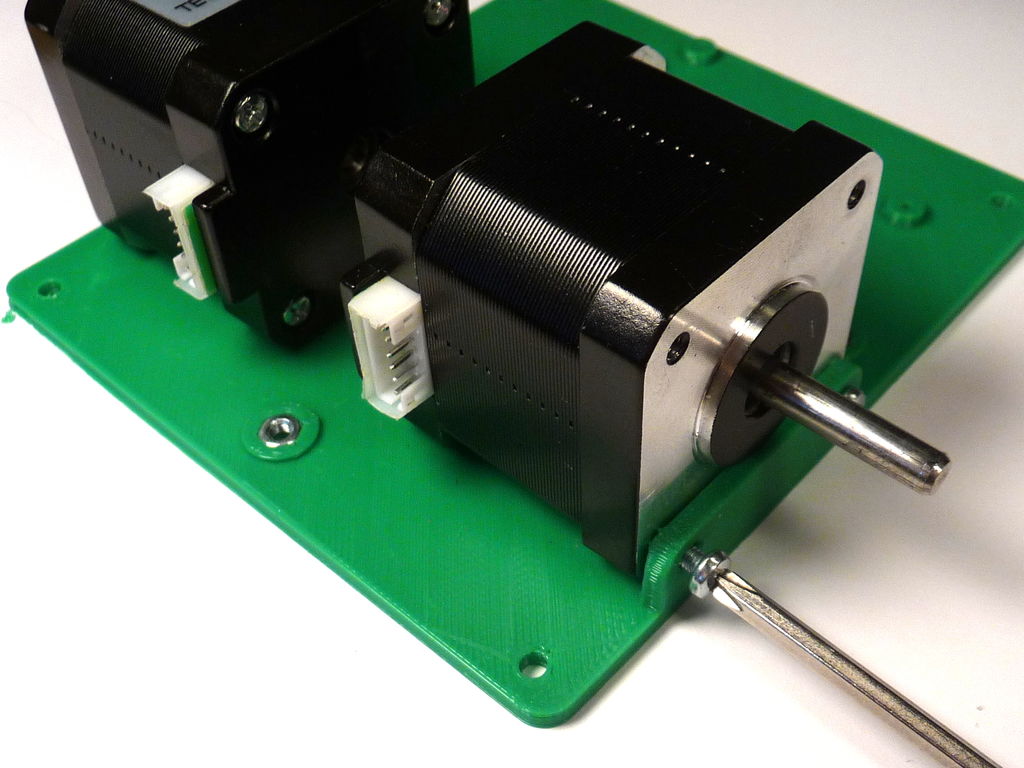
使用M3螺钉安装步进电机,电气连接器朝向后(较短)端。
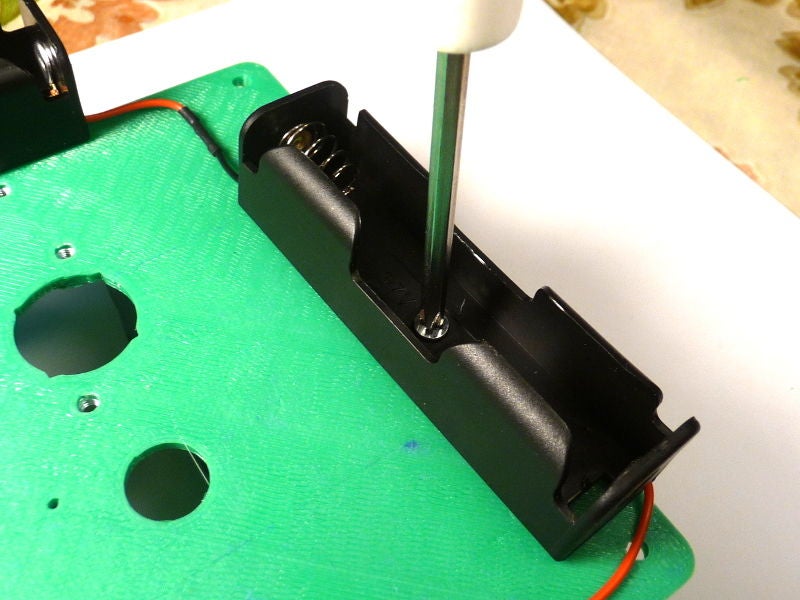
使用平头螺钉安装电池座。
步骤4:机箱装配第2部分
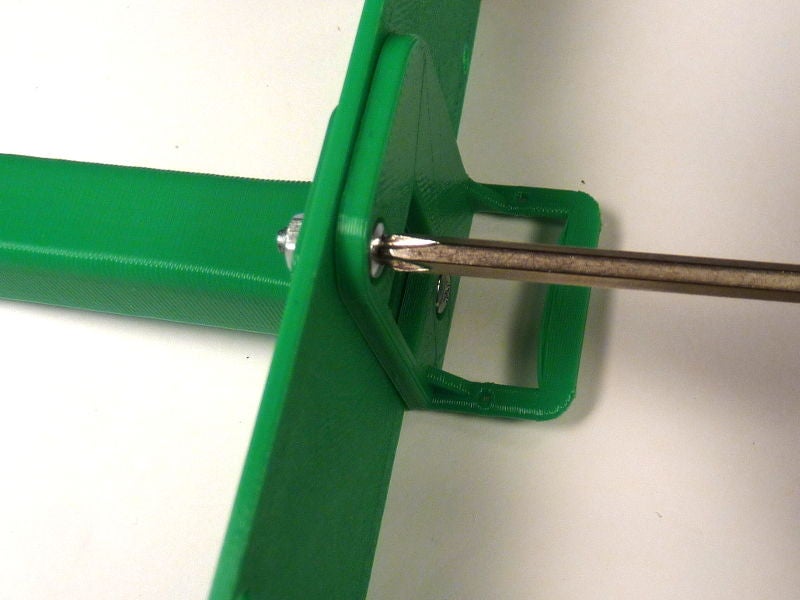

用M3螺钉和螺母将枪管,顶部件和伺服器安装在一起。
用M3螺丝将组合顶部件安装到踏步机上。
将钢轴承插入脚轮支架,必要时用吹风机加热,使其软化。
使用M3螺丝将脚轮安装到车身上。
步骤5:车轮装配

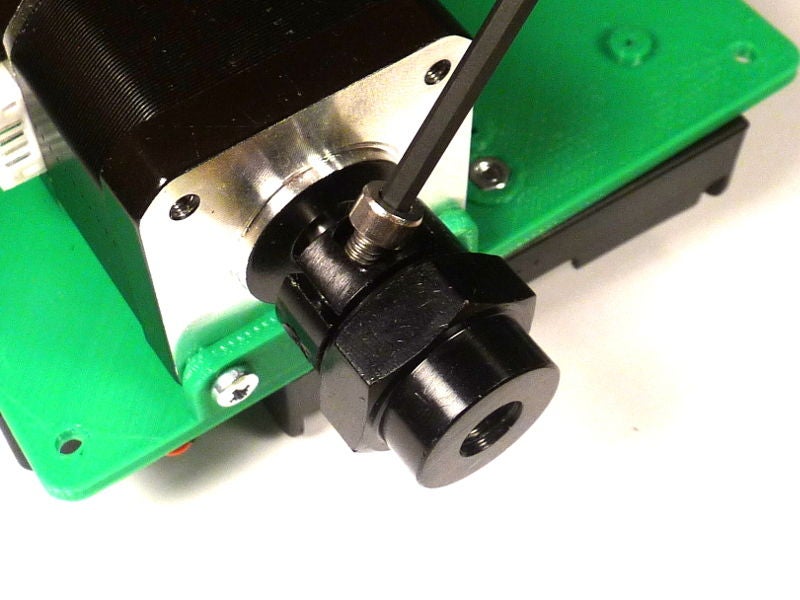

由于轴为5 mm并且轮毂(声称为适用于5毫米)实际上是6毫米。在夹紧螺钉上使用足够的扭矩可能会将它们剥离,因此我首先使用一对副夹具来关闭公差。
调整公差后,在步进轴上滑动轮毂并拧紧夹紧螺钉。
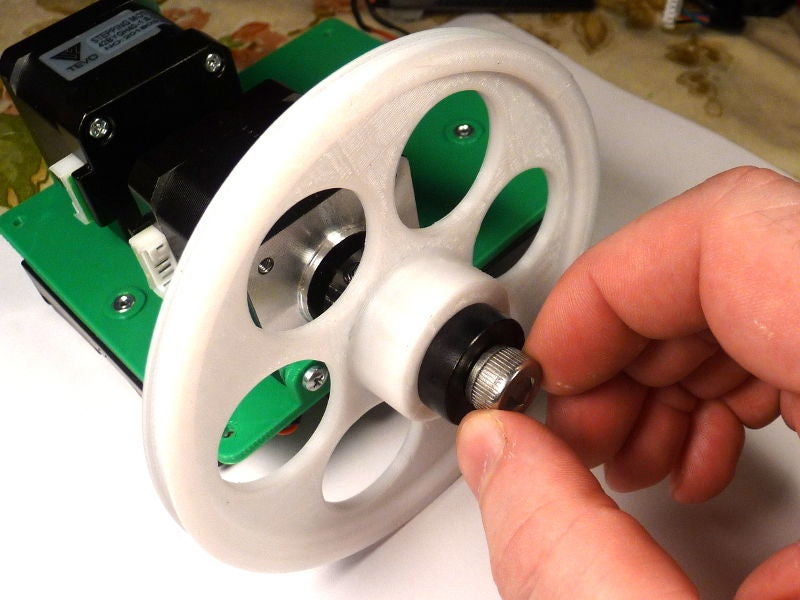
将3D滚轮放在轮毂上,插入大螺栓,然后拧紧。
将O形圈放在轮毂上。
确保车轮旋转时没有摆动。必要时调整。
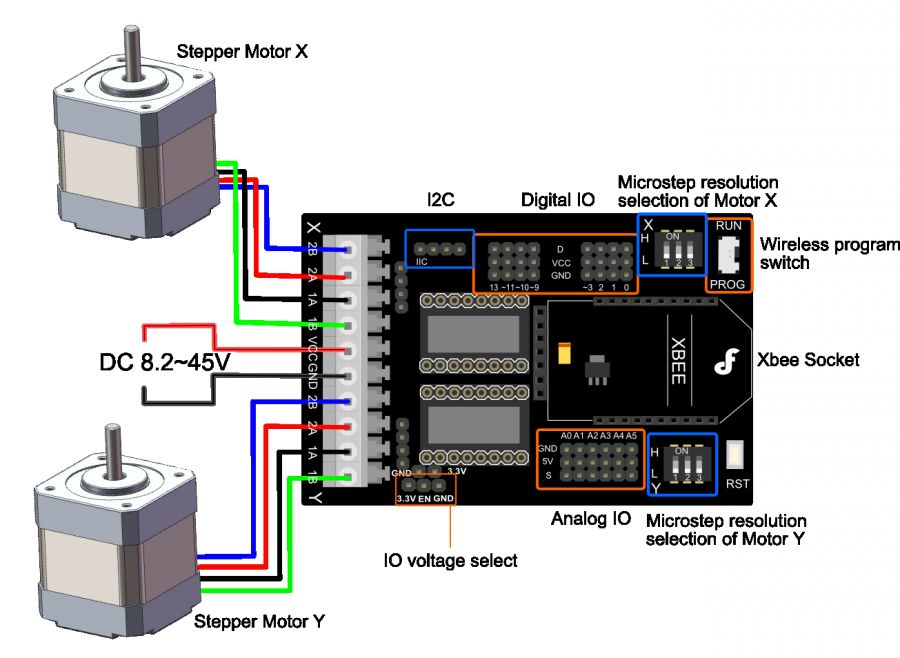
步骤6:接线
让我们取消电源,以便测试步进器。我们需要:
步进屏蔽需要8到35V才能运行步进电机。
步进电机的额定电压为3.4V,但通常由12V驱动。
Bluno(Arduino)建议输入电压为7 - 12V,或者可以通过5V USB直接供电。
锂电池单元具有标称电压3.7V。如果我们将三个串联,那么我们可以得到3 x 3.7V = 11.1 V和大约3 x 3000 mAh = 9000 mAh。 Bluno可能仅吸收20 mA电流,因此大部分漏极将来自步进电机,根据负载情况,它可能会达到一个或更高的电流。这应该给我们几个小时的运行时间。
为了测试,你可以为屏蔽提供12V稳压,为Arduino提供5V USB。将电池同时连接到电源可能更容易。
按照图纸并联焊接电池座。
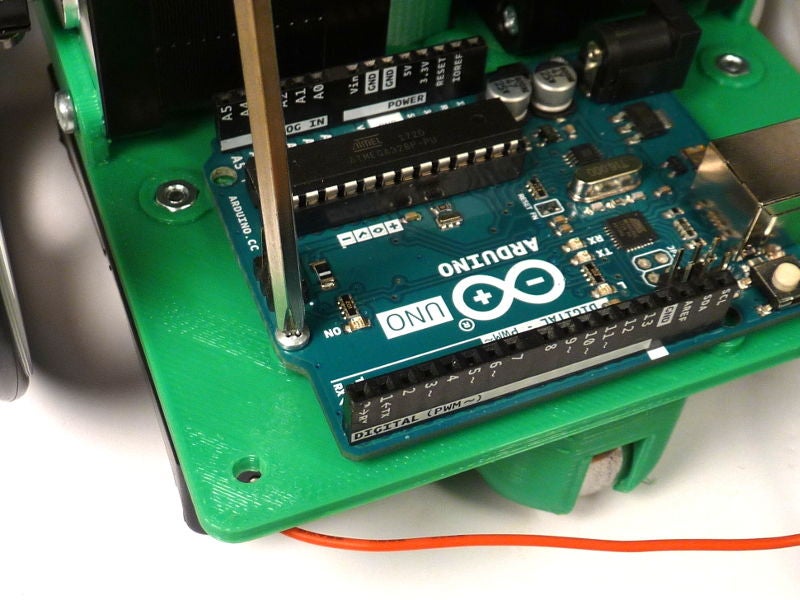
使用#2螺纹成型螺钉安装Arduino。
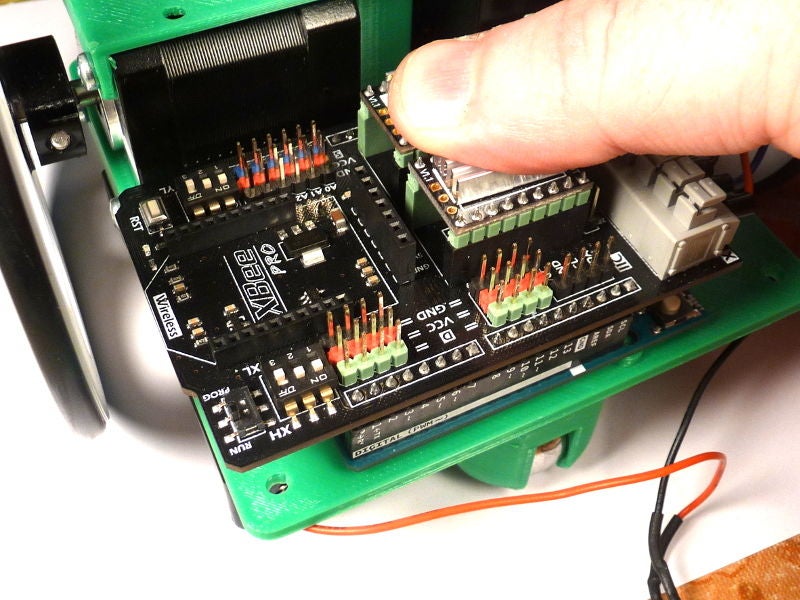
将电机护罩放在Arduino顶部
剥去已打捞的2.1 mm x 5 mm插孔线,并将它们与电池线一起拧紧:
白色条纹用红色电池引线扭转。
将红色引线插入VCC,黑色引线插入电机屏蔽层的GND。
步骤7:踩踏步进器
I有一点麻烦,拼凑足够的信息来运行,所以希望这将有助于其他人。您需要的关键文件是https://www.dfrobot.com/wiki/index.php/Stepper_Motor_Shield_For_Arduino(DRV8825)_SKU:DRI0023
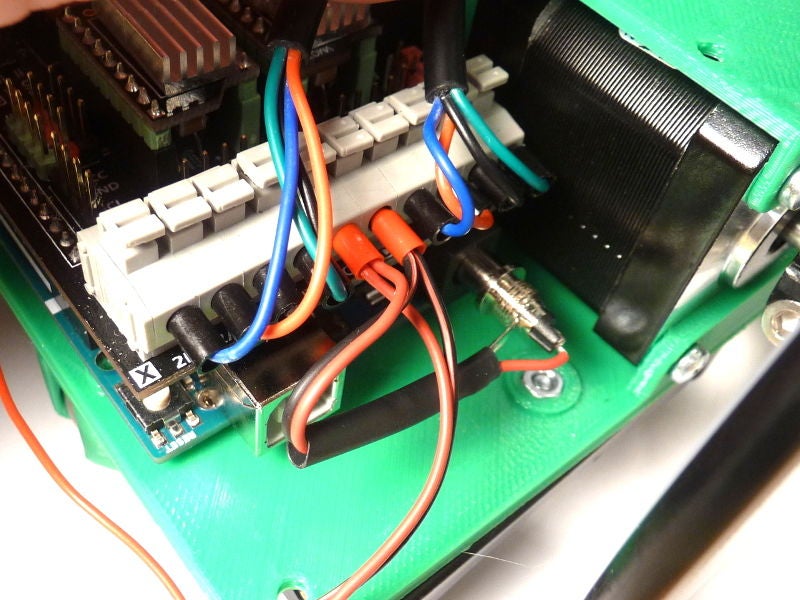
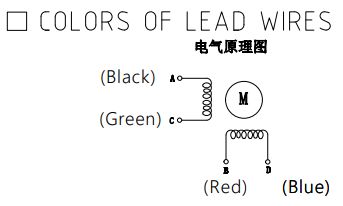
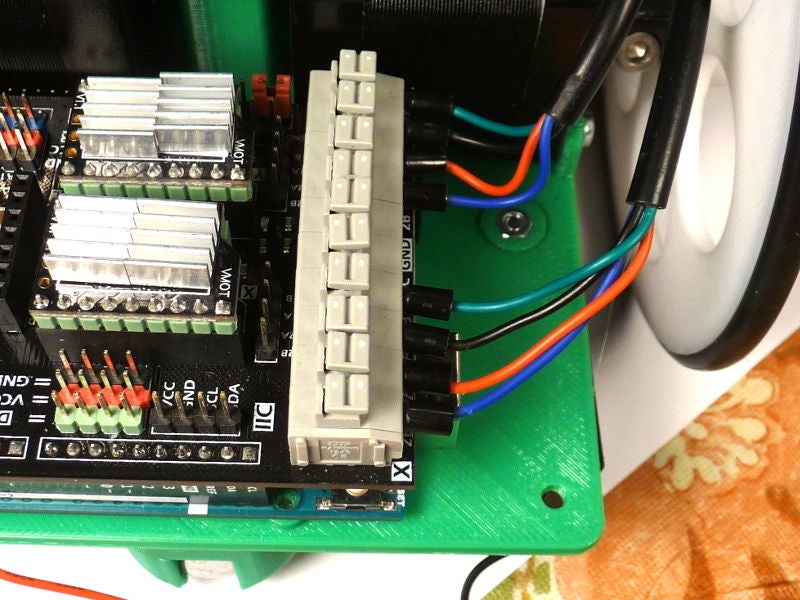
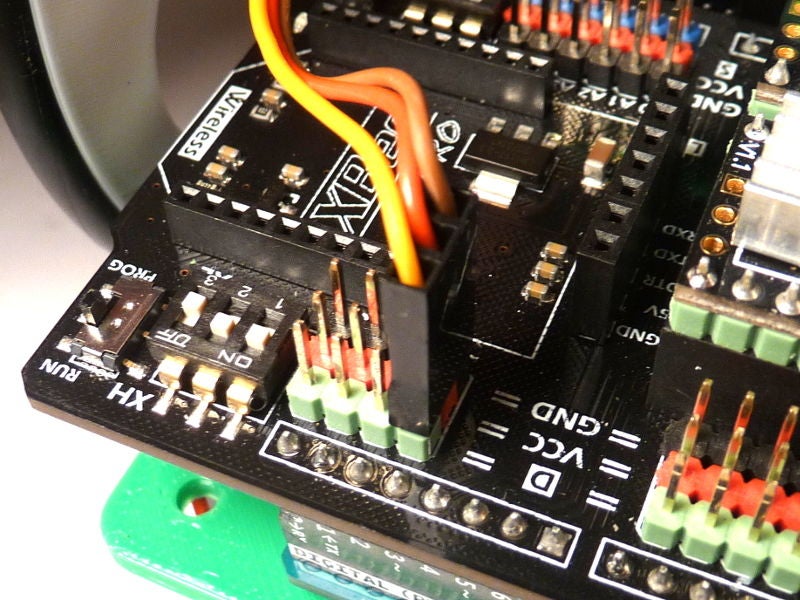
将步进电线和电源连接到屏蔽:
2B Blue
2A Red
1A Black
1B Grenn
提供示例草图对我有用,但不太有启发性。我们需要控制速度和旋转,以及在不使用时释放步进电机以节省电力。
我在http://bildr.org/2011/06/easydriver找到了一个修改过的例子/具有辅助功能。它一次只驱动一个步进器,但会给你信心,我们正走在正确的轨道上。我们稍后会写一些更复杂的代码。
步骤8:伺服
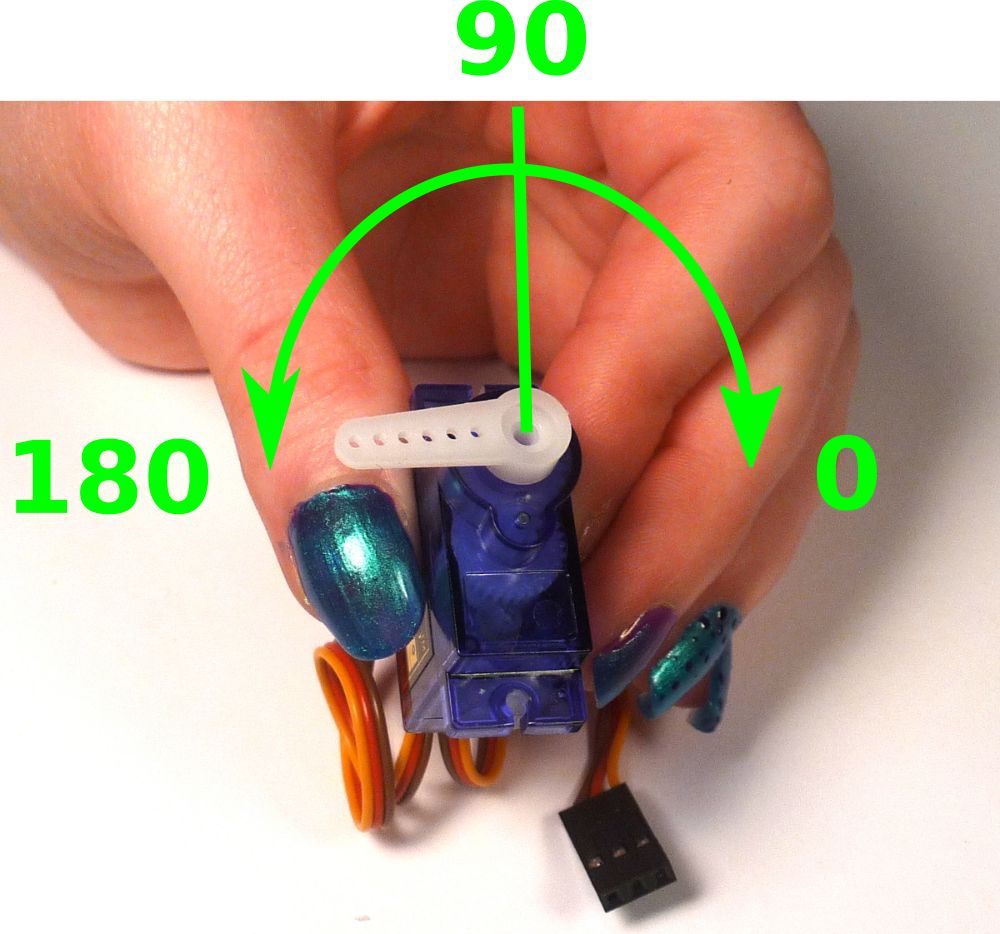
伺服用于升降用于绘图的笔。
将手臂放在轮毂上,逆时针轻轻转动步进机,向下看,直至到达止挡位置。
取下手臂并将其朝左(这将是向下位置)。
插入小螺纹成型螺钉并拧紧。
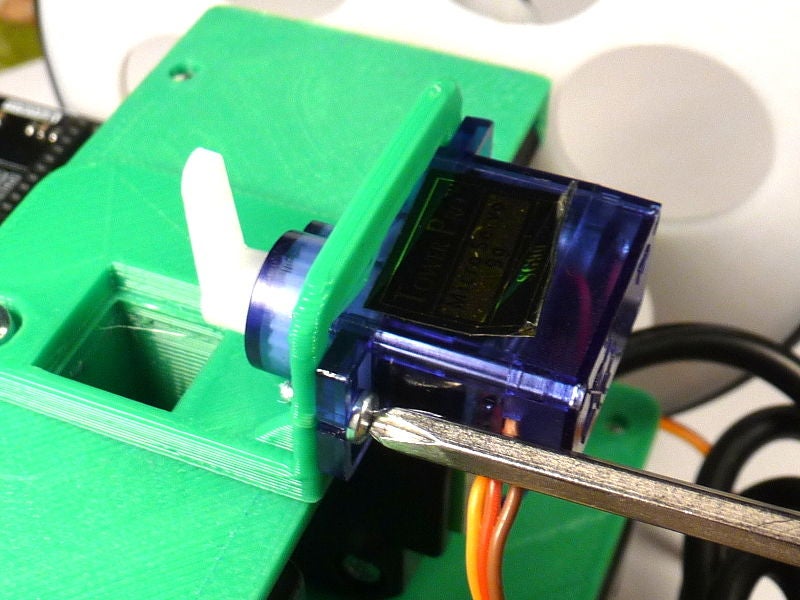
将伺服器插入安装座,使轮毂端朝上,并使用两个较大的螺纹固定螺钉进行连接。
步骤9:校准
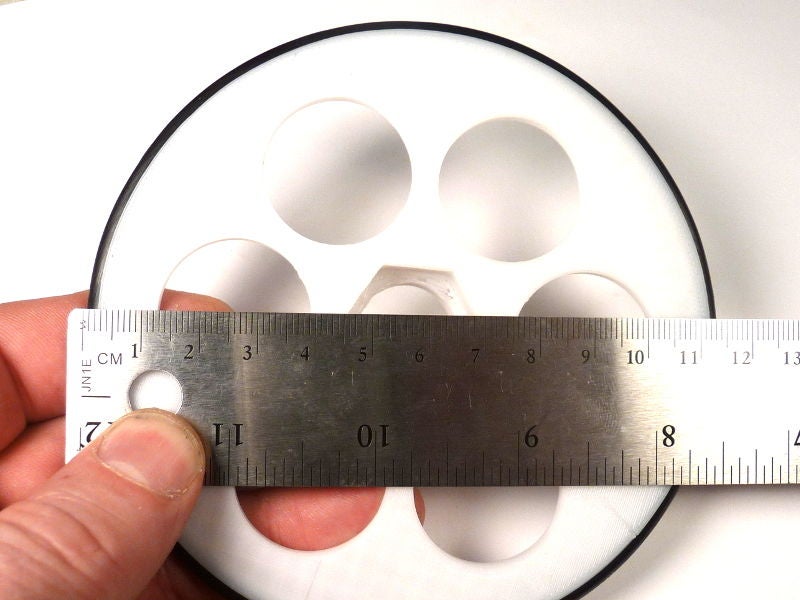

由于装配和对齐方式的不同,必须对机器人进行校准,以便能够移动精确的距离和角度。
从橡胶O形圈的外边缘测量车轮直径。
从机器人底部的O形圈中心测量轴距(它将与地板接触)。
下载附带的校准草图
输入您的测量参数。
上传草图。.
准备笔:
取下盖子,从笔尖侧滑动笔圈。
将笔插入支架,伺服臂笔直向上。
确保笔在此位置不接触纸张。
如果笔在轴上绑定,请使用锉刀去除任何粗糙度并增加孔径。
画一个正方形:
将电源开关滑动到“开”。
等待几秒钟以启动引导加载程序。
机器人完成第一个方格后,取下笔并关闭机器人。
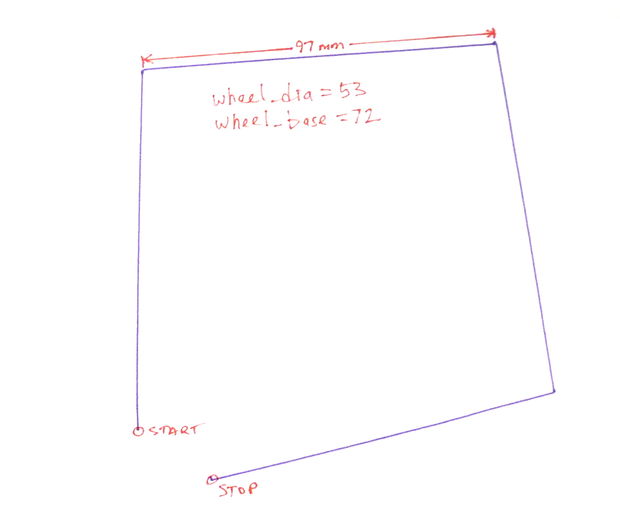
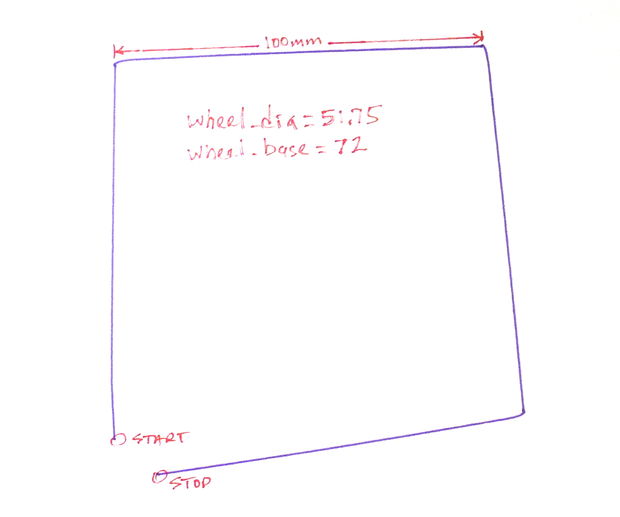
首先调整 wheel_dia 参数。测量正方形边长。它应为100 mm:
如果测量的距离太长,请增加 wheel_dia 。
如果测量的距离太短,请减少 wheel_dia 。
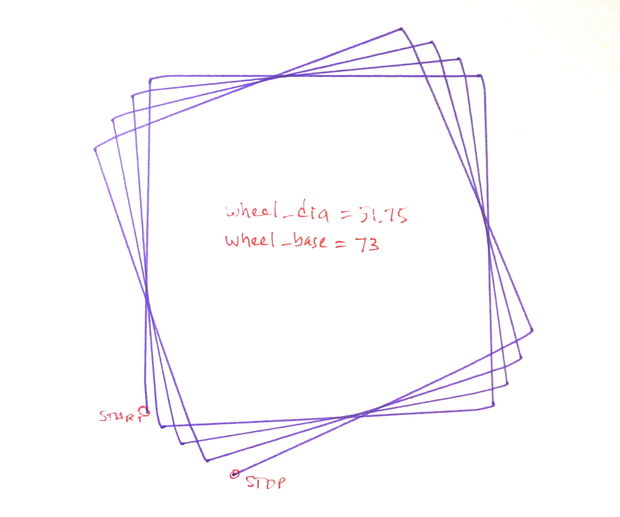
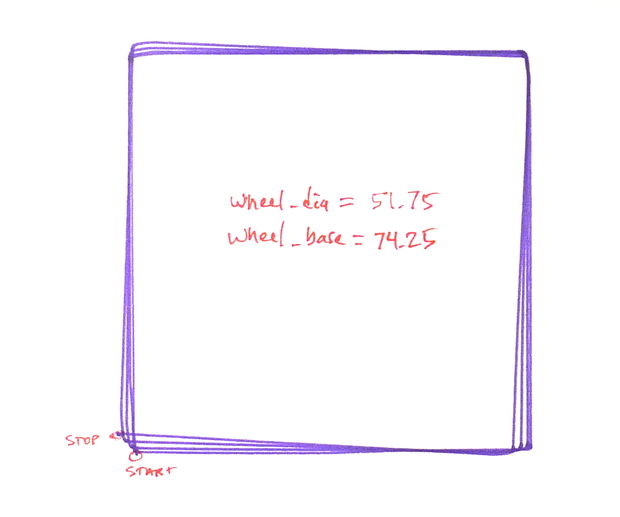
进行距离校准后,调整 wheel_base 参数,该参数会影响转弯角度。将机器人放在一张新纸上,打开它,让它绘制所有四个方块:
如果机器人转得太厉害(盒子顺时针旋转),减少 wheel_base 价值。
如果机器人没有足够快地转动(盒子逆时针旋转),请增加 wheel_base 值。
由于步进代码中的舍入错误和廉价步进器的齿轮中的斜率,你永远不会完美,所以不要花太多精力。
步骤10:绘图
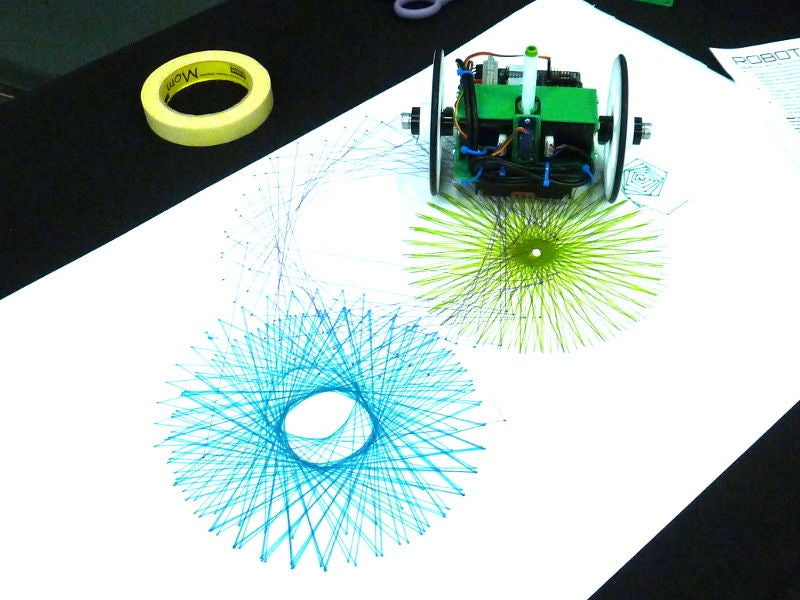


时间做一些绘图!下载附加的草图,为您提供一个开始。
第11步:现在什么?课程!
它可以工作并绘制漂亮的方块。现在好玩的开始了。
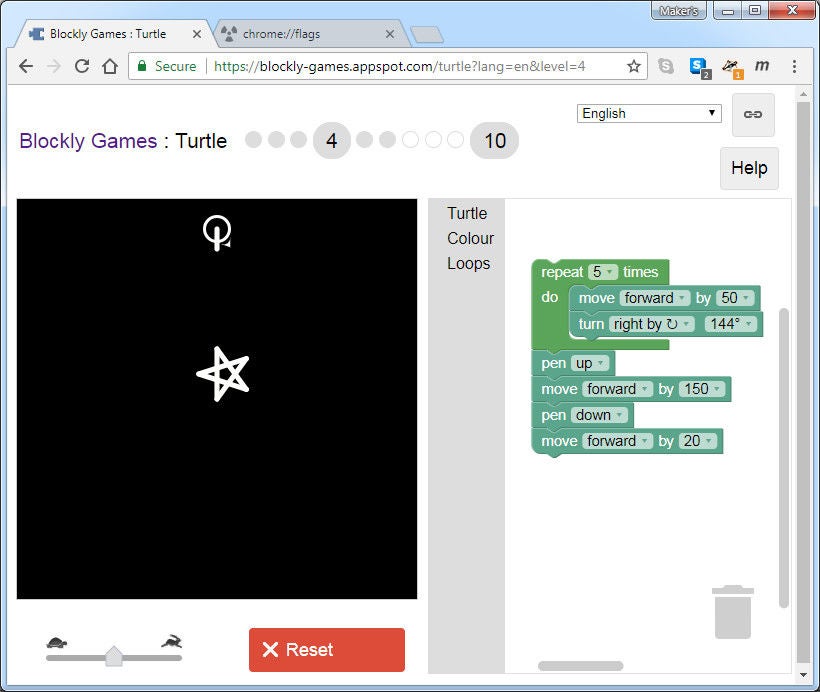
以下是学习龟图的几个资源。
https://blockly-games.appspot.com/(块编程)
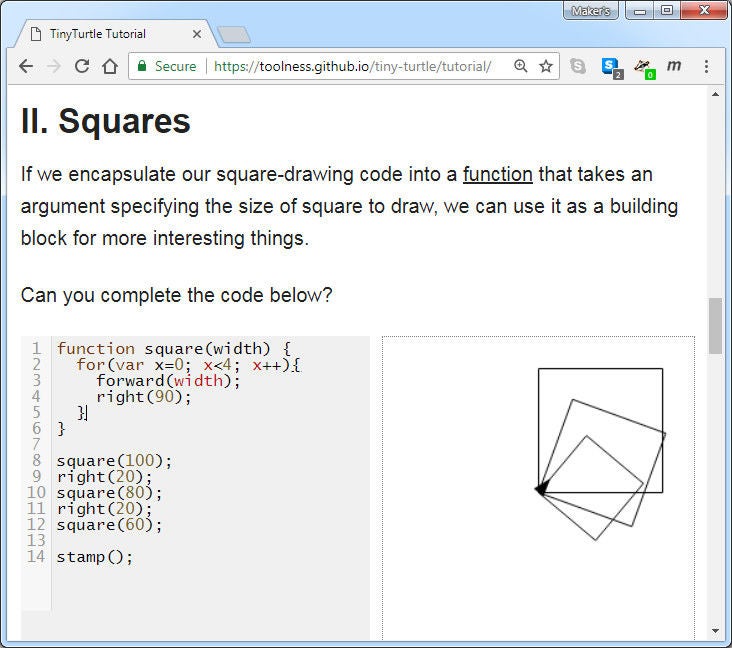
TinyTurtle教程( JavaScript)
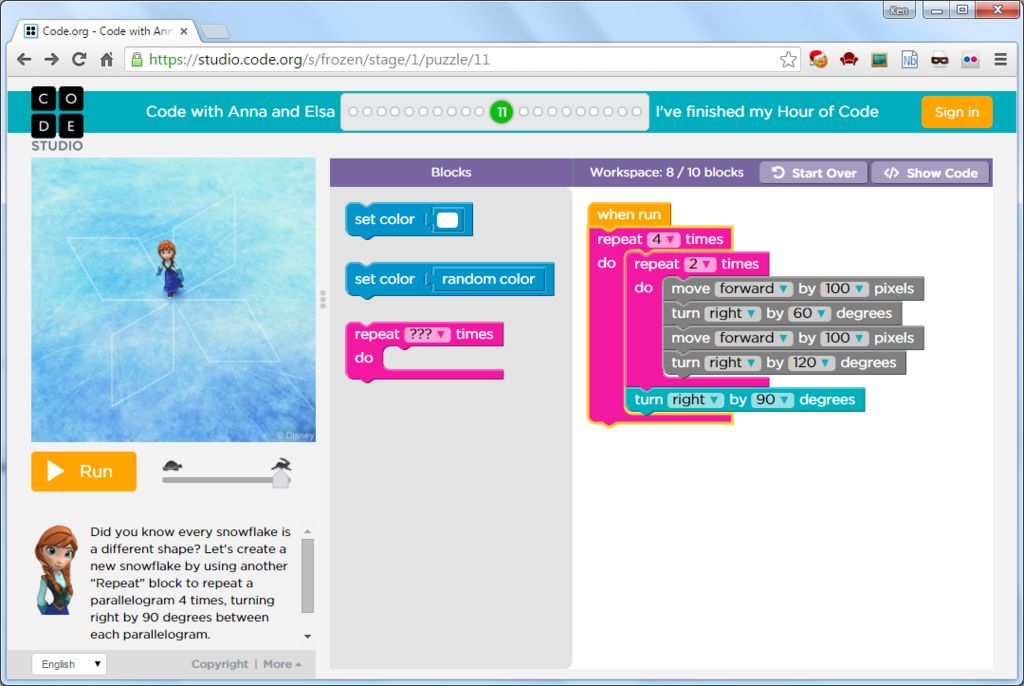
来自代码小时的Anna和Elsa的代码
我还发布了一个关于使用龟机器人这些在线资源与Turtle Robot的Instructable。通常,可以在校准草图中粘贴和运行任何Turtle JavaScript代码。您可以先在计算机上在线测试输出,然后将其上传到您的乌龟,以便在现实生活中进行绘制!
对于学生,这里有几个项目提示:
编程你的机器人写下你的名字!
从模板中设计和3D打印TinkerCad中的铭牌。它可以安装在伺服电机下方。
给你的机器人一些个性化的热胶和金光闪闪。 (只要保持车轮和眼睛没有障碍物)。
从OSTR_eyes草图中,设计并测试算法以导航房间。当一只眼睛发现某事时你会怎么做。双眼?你能加入Arduino的random()函数吗?
在地板上的一张大纸上构建迷宫,并对机器人进行编程以便在其中进行导航。
构建带墙的迷宫并设计算法以自动导航。
LED之间的按钮尚未投入使用,并连接到Arduino引脚“A3”。它可以用于什么?用它来打开和关闭LED开始。
如果您没有执行“固件(FW):测试和闪烁”步骤的调查部分,请返回并给它一个试试。
第12步:但等等,还有更多!

如果你有的话一直在关注,你注意到桶是方形的。通过一些奇怪的宇宙巧合,柔和的艺术家粉笔与Crayola标记的直径相同。我们所需要的是一种给粉笔施加足够压力的方法,我们是一位人行道艺术家。
你将需要:
3D打印桶和ram
粉笔,无论是柔和的方形艺术家粉笔还是小圆粉笔(不是胖人行道的东西)。
3/4“垫圈重量。
步骤:
打印出两个附件。
拆下伺服和伺服支架。
安装方形进料桶。
将粉笔磨到近点。
将粉笔放入桶中。
将柱塞放入桶中。
将垫圈重量放在柱塞上。
- 相关推荐
- 机器人
-
【DIY作品秀】用iPhone制作智能机器人2012-01-10 0
-
【DIY作品秀】制作简易避障机器人2012-01-10 0
-
DIY机器人2012-08-15 0
-
甲壳虫机器人DIY【暴强分享】2012-08-29 0
-
机器人组装图解2014-05-27 0
-
机器人书籍大全!强烈推荐2015-02-22 0
-
简易机器人DIY——常用工具篇2015-03-06 0
-
简易机器人DIY——常用器材篇2015-03-06 0
-
【福利大送】最新出炉的最全机器人DIY制作大全2015-06-05 0
-
【分享】DIY android版手机机器人2015-08-14 0
-
各种炫酷的仿生机器人2016-08-24 0
-
机器人,arduino,DIY2016-09-06 0
-
机器人的主要技术参数2017-08-15 0
-
准备入门机器人,求以下问题指导?2021-07-22 0
-
DIY一个机器人套件2022-08-03 0
全部0条评论

快来发表一下你的评论吧 !
