

自动油漆混合机的制作
电子说
描述
第1步:它如何运作?
我们需要为这个项目考虑两种颜色理论模型。
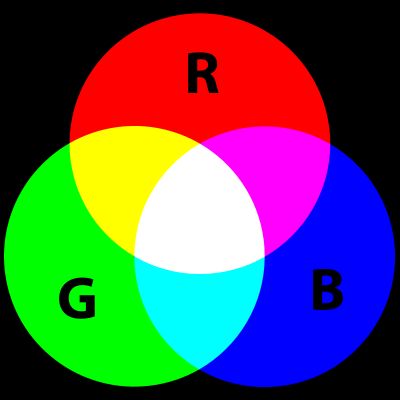
1)RGB颜色模型
RGB颜色模型是一种加色模型,其中红色,绿色和蓝色光以各种方式相加,以再现各种颜色。 RGB颜色模型的主要目的是用于电子系统(如电视和计算机)中图像的感测,表示和显示,但它也已用于传统摄影。
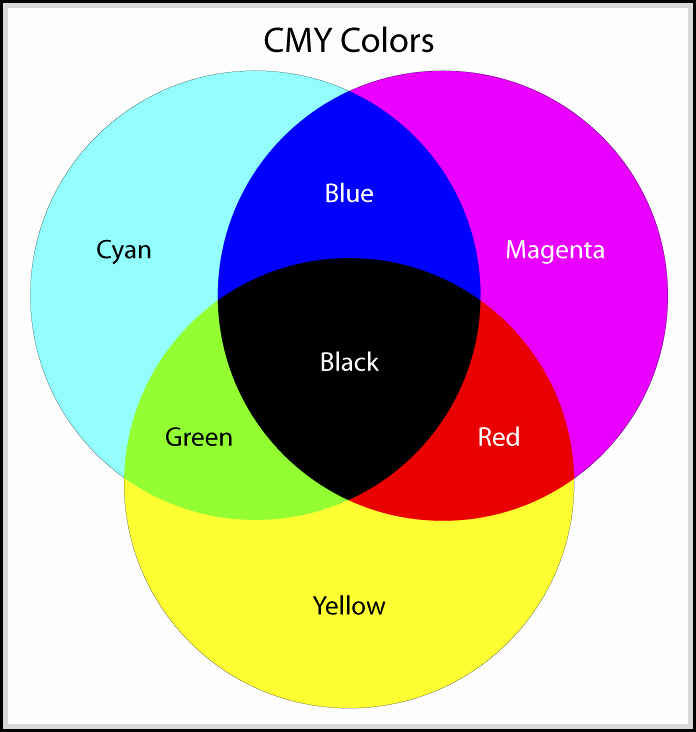
2 )CMYK颜色模型
CMYK颜色模型(印刷色,四色)是减色模型,用于彩色打印机。 CMYK是指用于某些彩色打印的四种墨水:青色,品红色,黄色和键(黑色)。 CMYK模型通过在较浅(通常为白色)背景上部分或完全遮盖颜色来工作。墨水会减少原本会被反射的光线。这种模型称为减法,因为墨水从白色中“减去”亮度。
在RGB等加色模型中,白色是所有原色光的“加性”组合,而黑色是没有光的。在CMYK模型中,它是相反的:白色是纸张或其他背景的自然色,而黑色是由彩色墨水的完整组合产生的。为了节省墨水,并产生更深的黑色色调,使用黑色墨水代替青色,品红色和黄色的组合产生不饱和和深色。
步骤2:机制

正如“工作原理”中提到的那样?这个机器将使用RGB和CMYK颜色模型。
因此,我们将使用RGB模型将RGB颜色代码提供给机器,而CMYK模型通过混合CMYK颜料制作阴影白色的哪个体积将是恒定的并且是手动添加的。
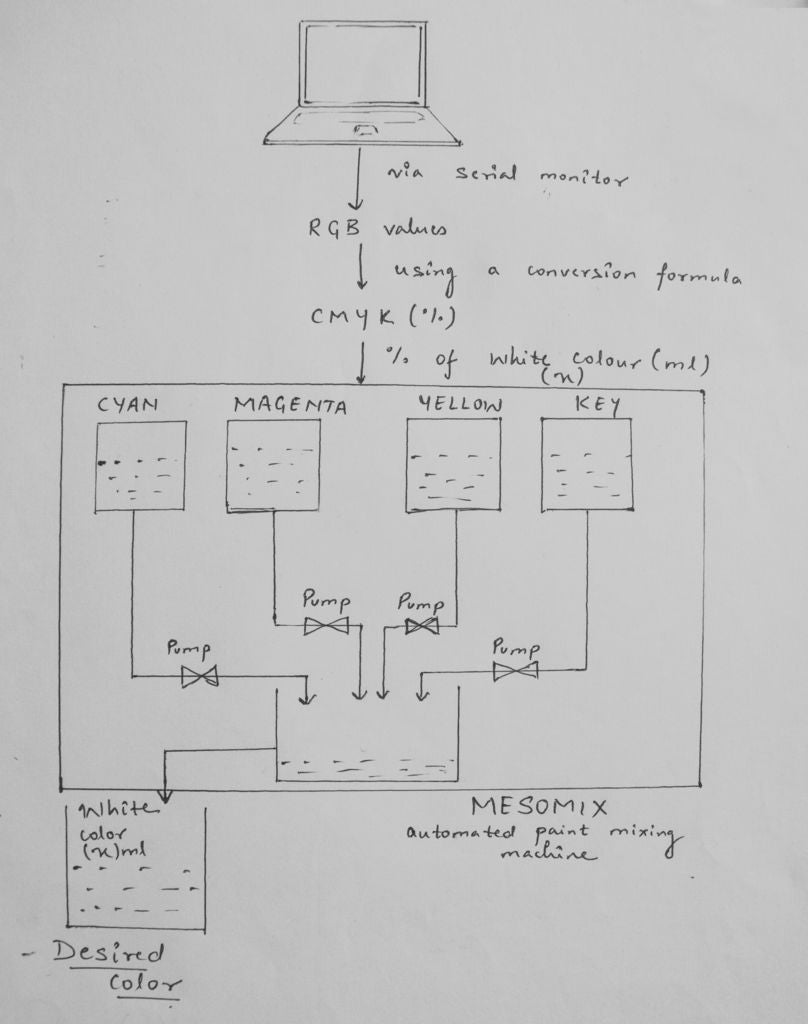
因此,为了找出构建这台机器的最佳程序,我勾勒出一个流程图来清除脑海中的大局。/p》
以下是计划如何进行:
RGB值和白色的音量将通过串行监视器发送。
然后这些RGB值将使用转换公式转换为CMYK百分比。
The R,G,B values are divided by 255 to change the range from 0..255 to 0..1:
R‘ = R/255
G’ = G/255
B‘ = B/255
The black key (K) color is calculated from the red (R’), green (G‘) and blue (B’) colors:
K = 1-max(R‘, G’, B‘)
The cyan color (C) is calculated from the red (R’) and black (K) colors:
C = (1-R‘-K) / (1-K)
The magenta color (M) is calculated from the green (G’) and black (K) colors:
M = (1-G‘-K) / (1-K)
The yellow color (Y) is calculated from the blue (B’) and black (K) colors:
Y = (1-B‘-K) / (1-K)
因此,我获得了所需颜色的CMYK百分比值。
现在,通过将每个百分比值乘以白色的体积,需要将所有百分比值转换为C,M,Y和K体积。
C(mL) = C(%) * Volume of White Color(x mL)
M(mL) = M(%) * Volume of White Color(x mL)
Y(mL) = Y(%) * Volume of White Color(x mL)
K(mL) = K(%) * Volume of White Color(x mL)
然后将这些C,M,Y和K体积乘以b y各自电机的每转步数。
Steps required to pump Color = Color(mL) * Steps/Rev of respective motor
就是这样,通过使用它,每种颜色都会被泵送形成混合颜色,将与精确的白色体积,形成所需的色调。
第3步:设计

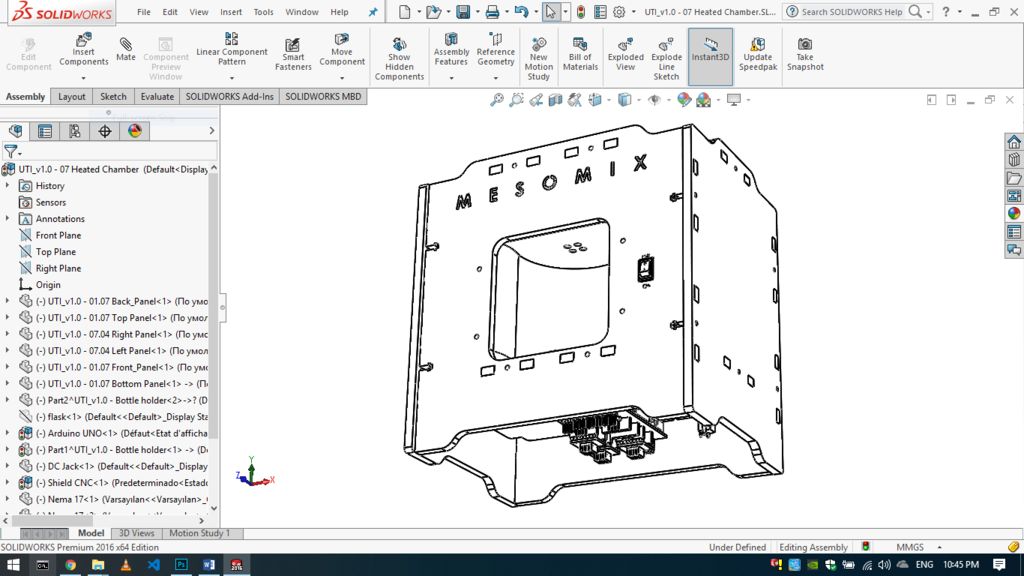

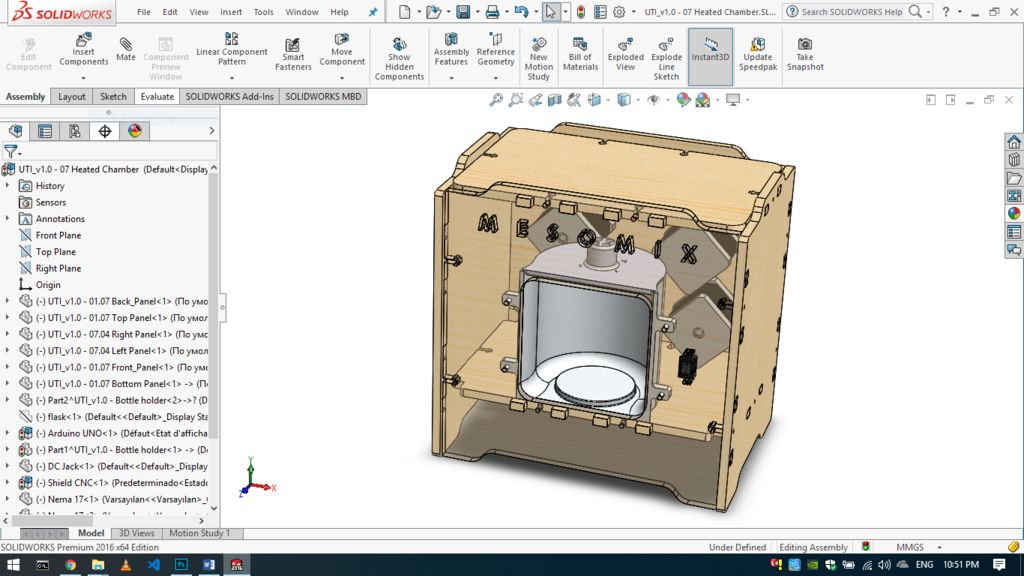
I我决定在SolidWorks中进行设计,因为我在过去的两年里一直在研究它,并在设计阶段应用了我所有的设计,减法制造和增材制造技术,同时牢记所有参数,包括使用自组件,紧凑和桌面友好的设计,精确,快速和经济高效。
经过几次迭代,我想出了这个设计,满足了我的所有要求,我对结果非常满意。
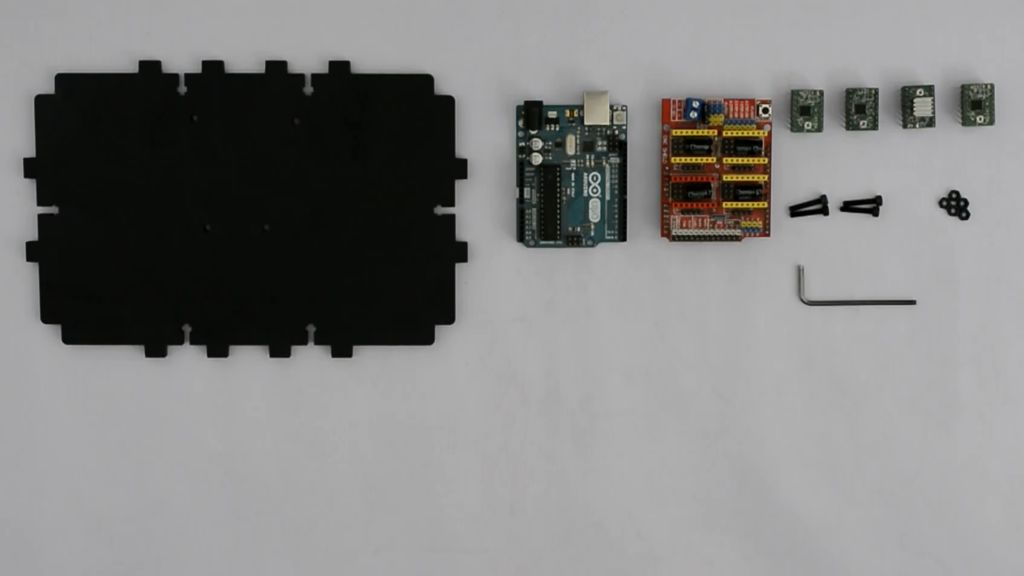
第4步:我们需要什么?
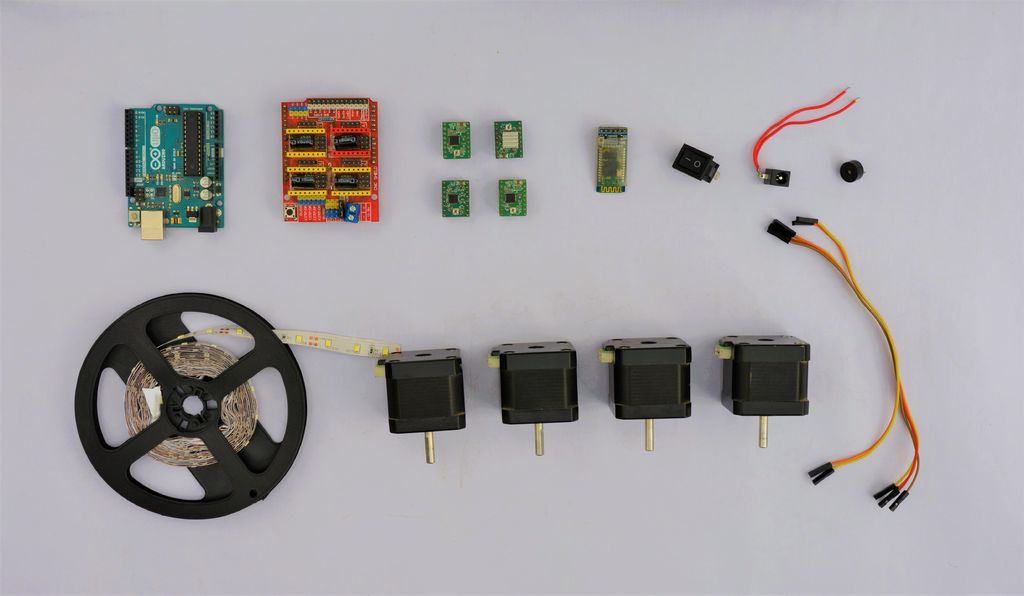


电子元件:
1x Arduino Uno
1x GRBL Shield
4x A4988步进驱动程序
1x DC Jack
1x 13cmx9cm翘板开关
4x Nema 17
2x 15cm RGB LED灯条
1x 蜂鸣器
1x HC-05蓝牙
硬件组件:
24x 624zz轴承
4x 50cm长硅胶管(外径6mm,内径4mm)
1x 100mL测量气缸
5x 100mL烧杯
30x M3x15螺栓
30x M3螺母
12x M4x20螺栓
16x M4x25螺栓
30x M4螺母
和一些M3和M4垫圈
工具:
激光切割机
3D打印机
Allen Keys
Plier
螺丝刀
烙铁
胶枪
步骤5:激光切割
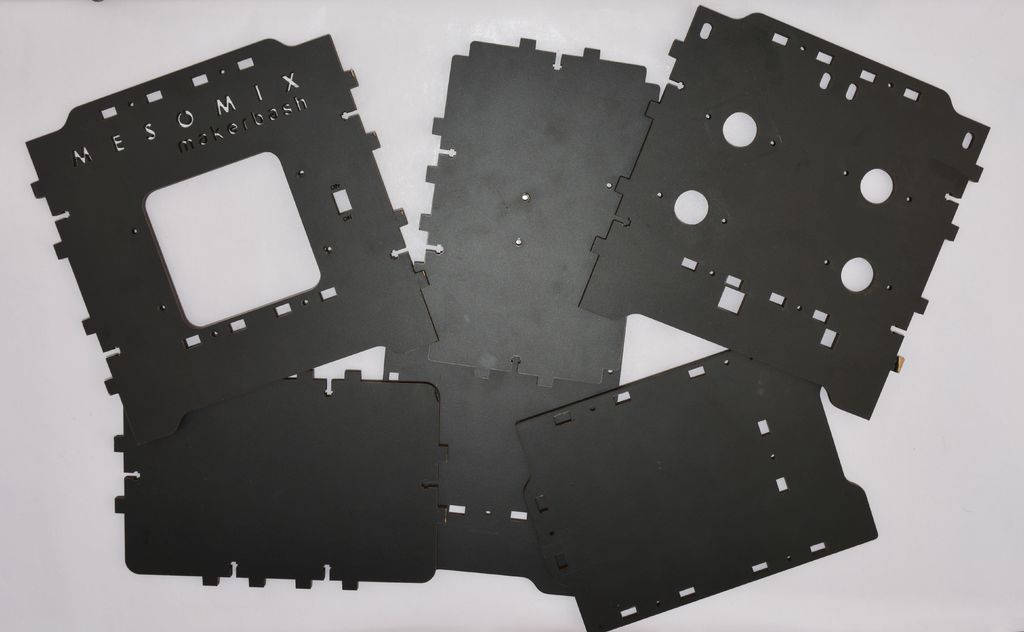

最初,我设计的框架由胶合板组成,但发现6毫米MDF也适用于这台机器MDF的唯一问题是它容易受潮,并且油墨或颜料很可能会溢出到面板上。
为了解决这个问题,我使用的是黑色乙烯基板,仅添加总成本只需几美元,但为机器提供了很好的磨砂效果。
在此之后,我已准备好通过激光机切割我的面板了。
我正在附加下面的文件并已从文件中删除该徽标,以便您可以轻松添加:)
步骤6:3D打印




我经历了各种类型的泵,经过大量的研究,我发现了蠕动泵完全符合我的要求。
但是大多数在互联网上都是带直流电机的泵,这些泵不是那么精确,在控制它们时会引起一些问题,另一方面,有些泵在那里使用Stepper Motors,但是它们的成本相当高。
所以,我决定选择3D印刷蠕动泵使用Nema 17马达,幸运的是,我通过Thingiverse上的链接,SILISAND制作了RALF蠕动泵的混音。 (特别感谢SILISAND和RALF的设计,这对我帮助很大。)
因此,我将这个蠕动泵用于我的项目,大大降低了成本。
但是在打印之后并且测试了所有部件我意识到它们对于这个应用来说并不是很完美。然后我通过增加其曲率来编辑软管压力管,以便它可以在软管上施加更大的压力,并且还编辑了支架安装顶部,以便更好地抓住电机轴。
我的3D打印机设置:
材料(PLA)
层高(0.2mm)
外壳厚度(1.2mm)
填充密度(30%)
打印速度(50mm/s)
喷嘴温度(210° C)
支撑类型(无处不在)
平台粘附类型(无)
您可以下载此项目中使用的所有文件 -
步骤7:轴承座



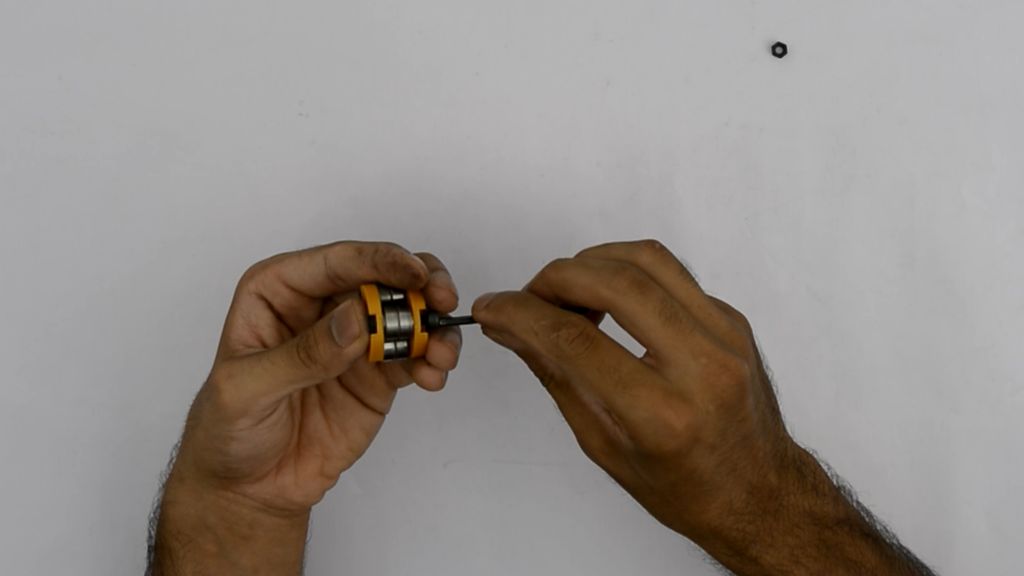


要组装轴承座,我们需要以下部件:
1x 3D印刷轴承底座
1x 3D印刷轴承座顶部
6x 624zz轴承
3x M4x20螺栓
3x M4螺母
3x M4垫片
M4 Allen Key
如图所示,将所有三个M4x20螺栓插入3D打印轴承安装顶部,然后插入一个M4垫圈,随后将两个624zz轴承和另一个垫圈插入每个螺栓中。然后将M4螺母插入3D印刷轴承安装底部,通过放置底部安装件拧紧螺栓。
按照相同的步骤制作其他三个轴承安装座。
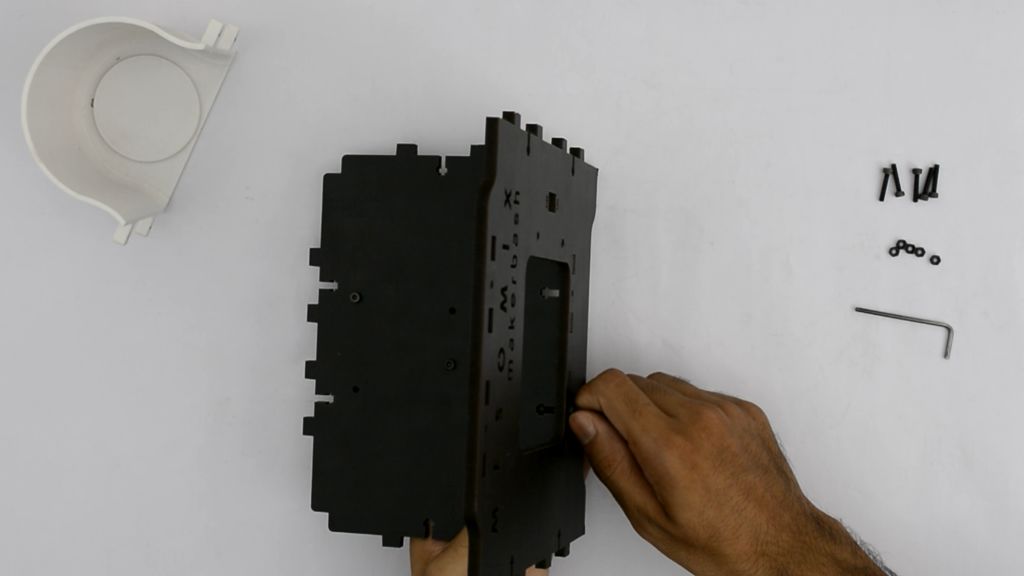
步骤8:​准备后面板


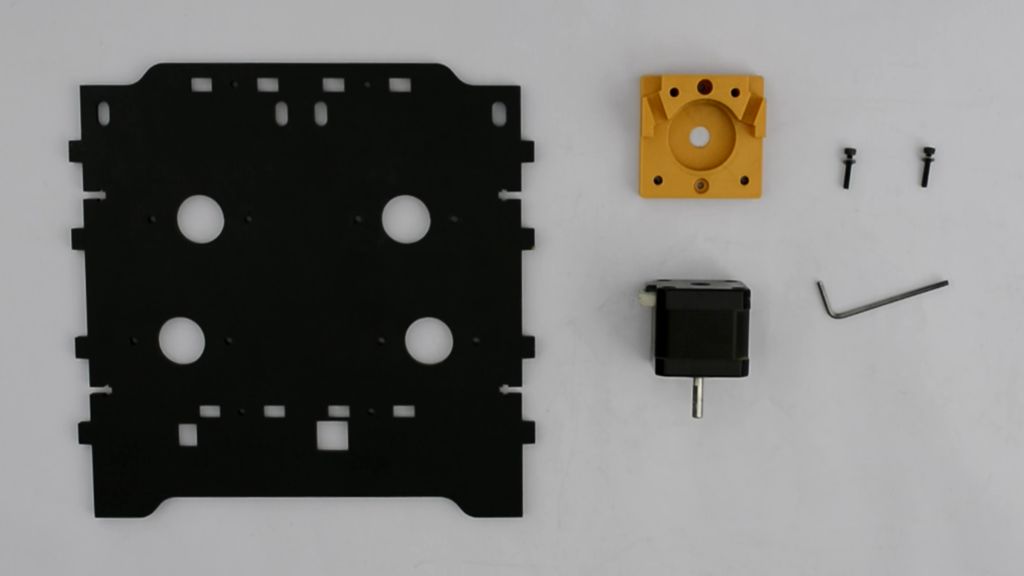


要组装后面板,我们需要以下部件:
激光切割后面板
4x 3D印刷泵底座
16x M4螺母
8x M3x16螺栓
8x M3垫圈
4x Nema 17 Stepper电机
M3内六角扳手
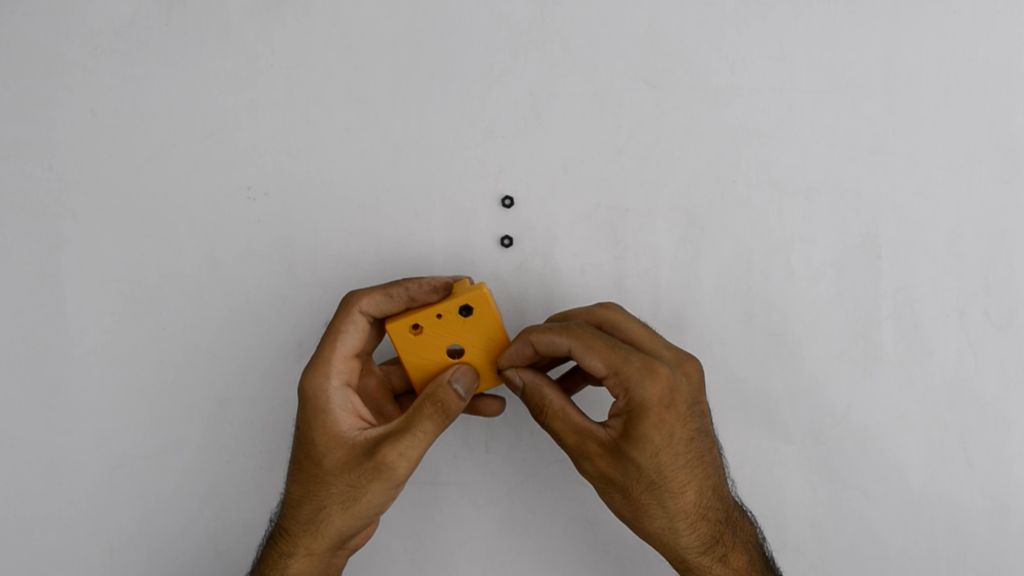
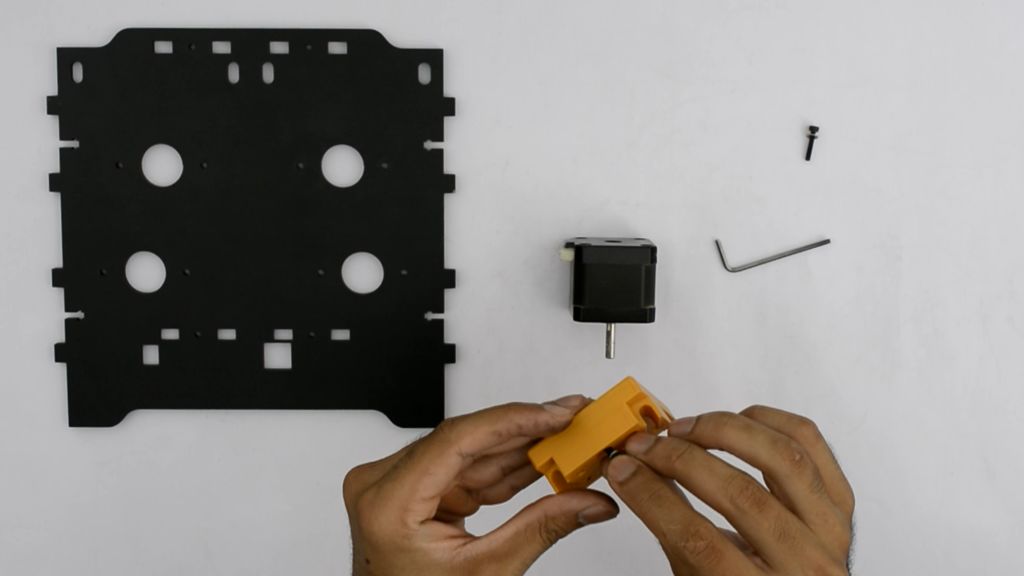
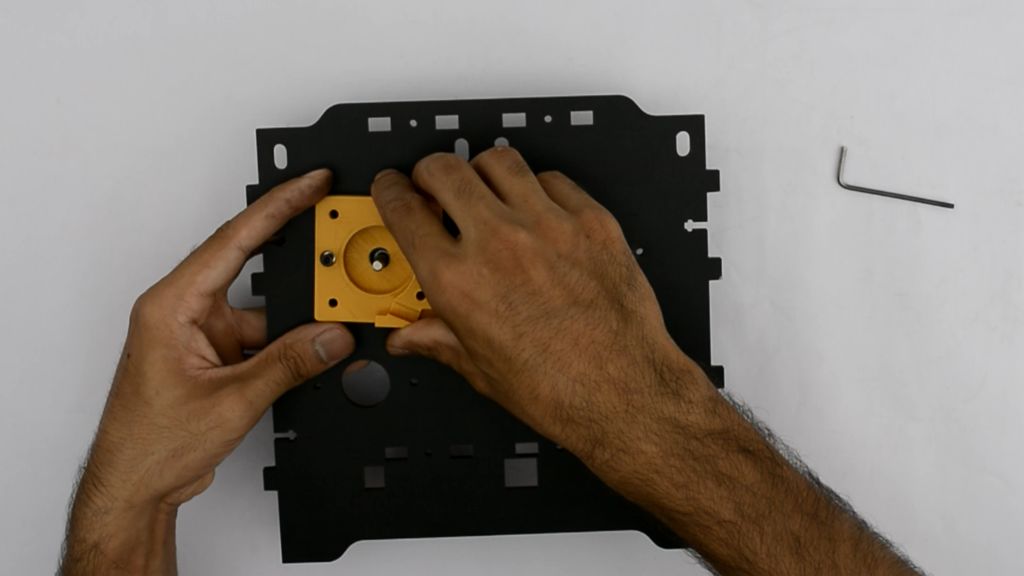
要准备后面板,请使用3D打印泵底座并将M4螺母插入泵底座背面的插槽中如图所示。同样准备其他三个泵底座。
现在将Nema 17步进电机与后面板上的插槽从后侧对齐,然后使用M3x15螺栓和垫圈安装泵底座。并使用相同的步骤组装所有电机和泵底座。
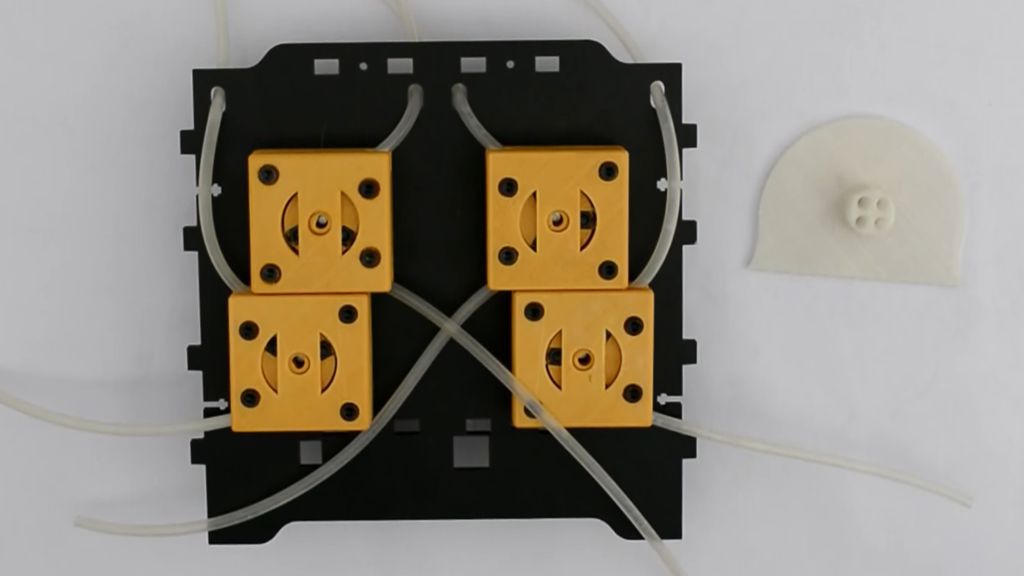
步骤9:组装后面板上的所有泵
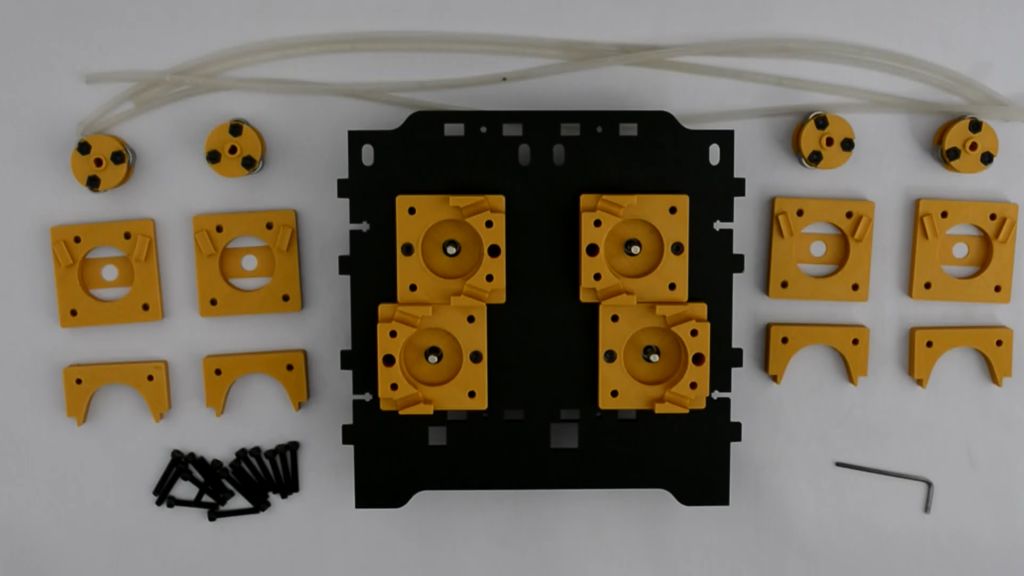
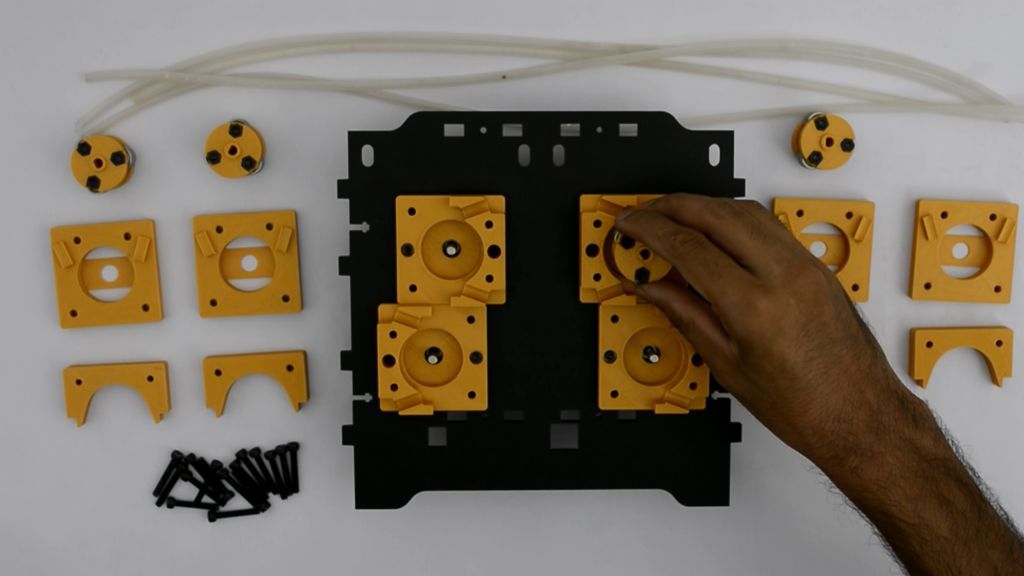
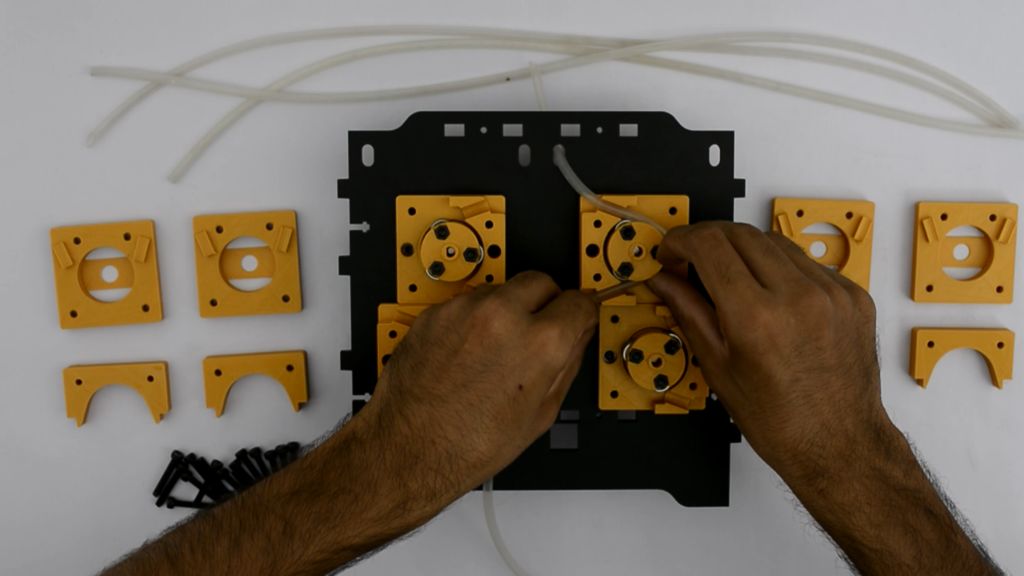
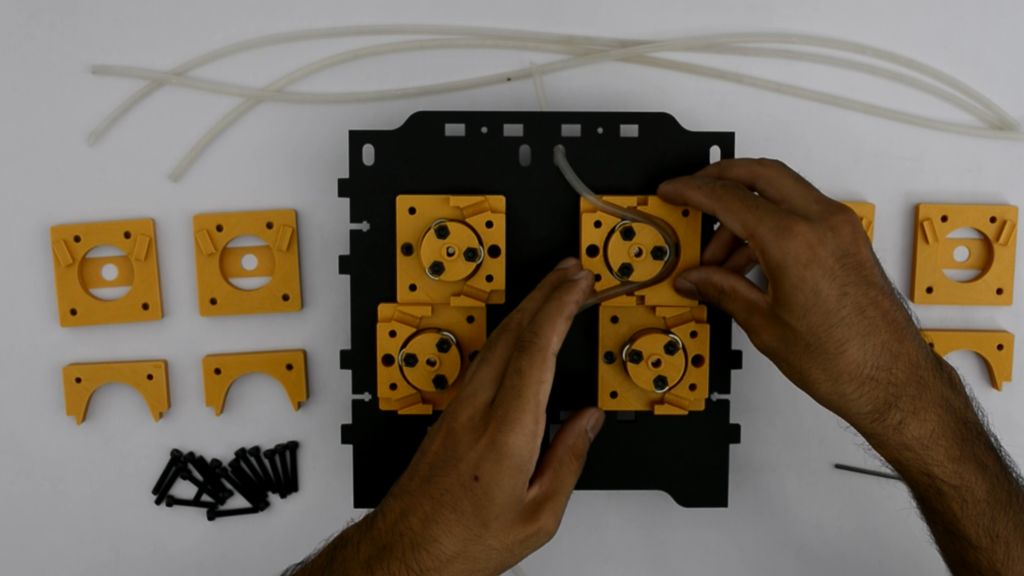


要组装所有泵,我们需要以下部件:
电机和泵底座组装后面板
4x轴承座
4x 3D打印软管压力板
4x 3D打印泵顶
li》
4x 50cm硅管(外径6mm,内径4mm)
16x M4x25螺栓
将所有轴承座安装在电机轴上。然后将硅管放在轴承座上,同时用3D打印的软管压力板按压。并使用带有M4x25螺栓的3d打印泵顶部关闭泵。
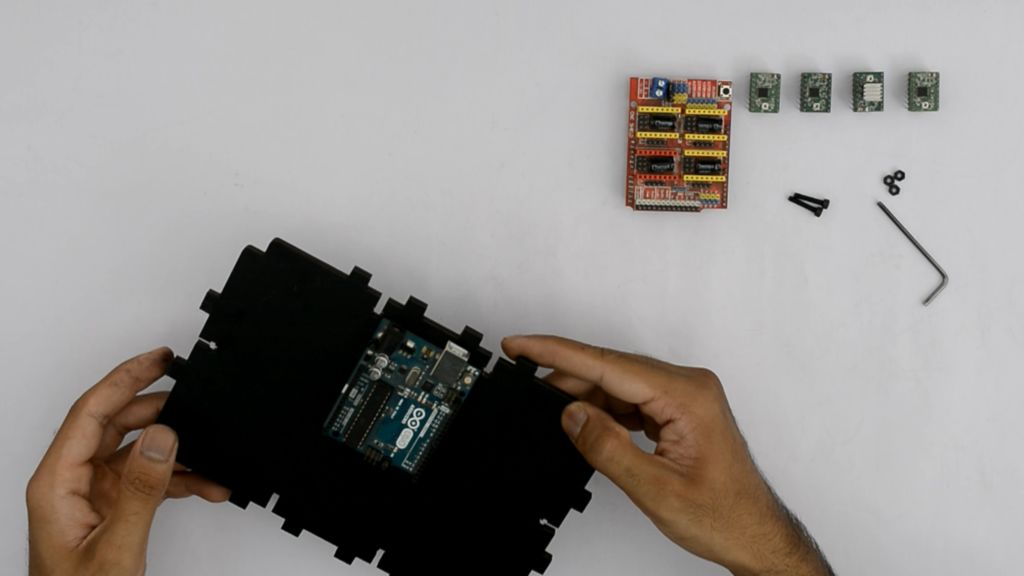
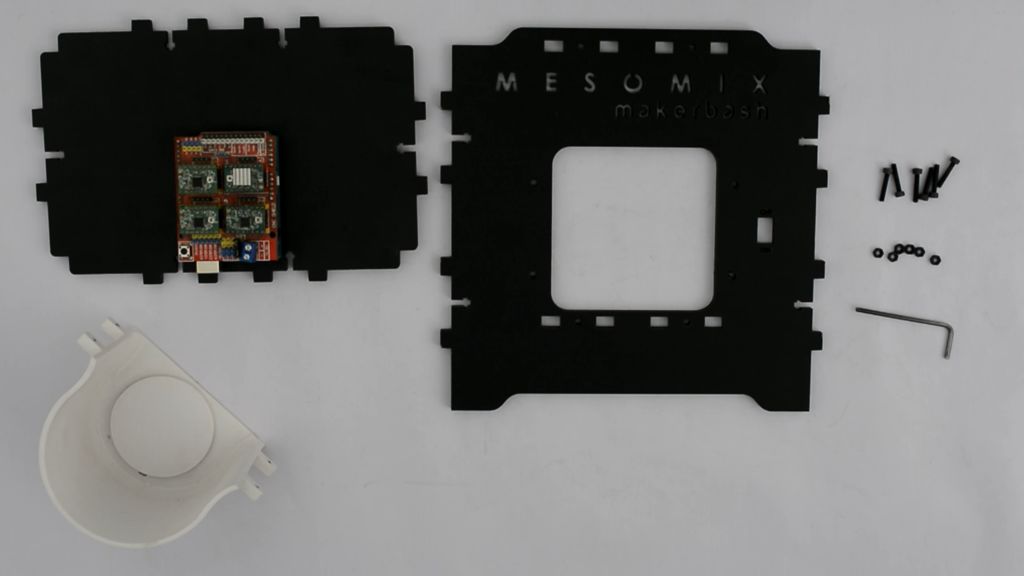
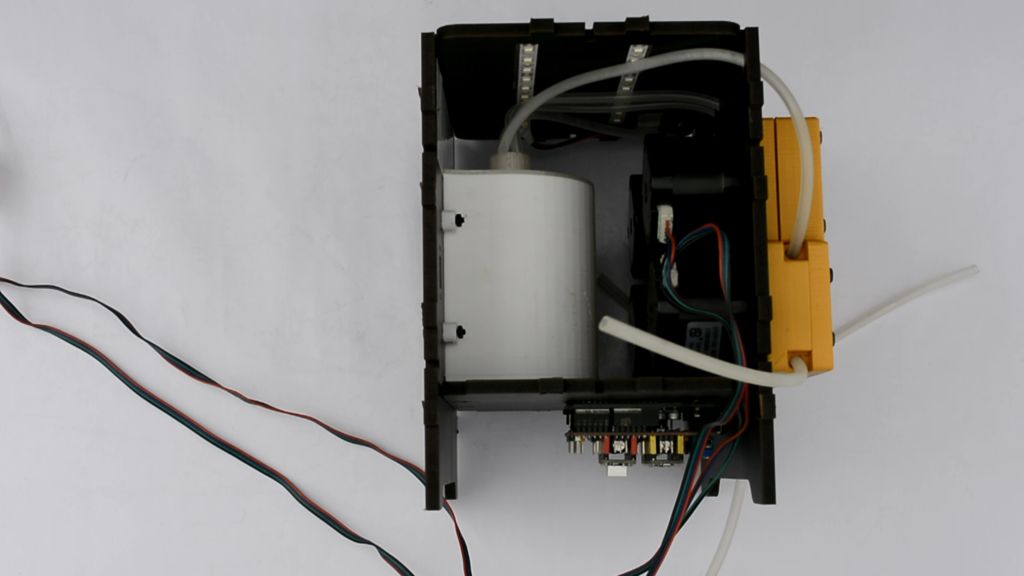
步骤10:准备底部面板
要组装底部面板,我们需要以下部件:
激光切割底部面板
1x Arduino Uno
1x GRBL Shield
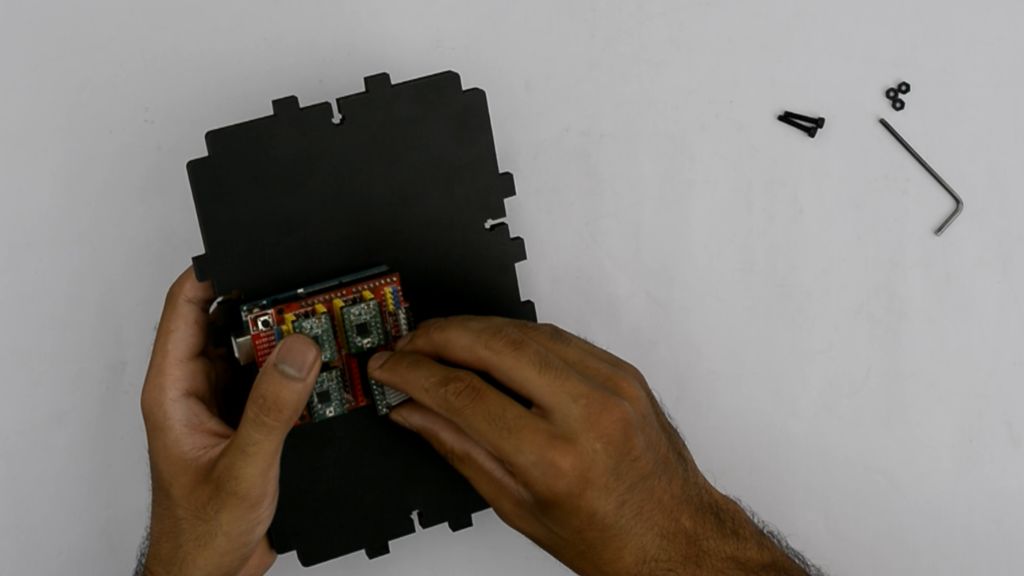
4x A4988步进驱动器
4x M3x15螺栓
4x M3 Nut
M3 Allen Key
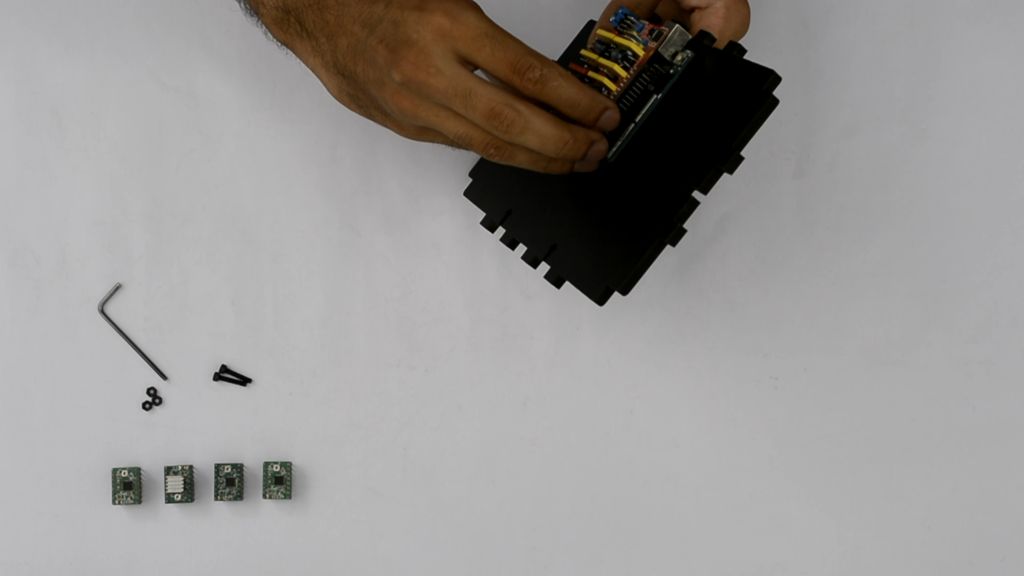
使用M3x15螺栓和M3螺母在后面板上安装Arduino Uno。之后在Arduino Uno上堆叠GRBL Shield,然后使用GRBL Shield上的A4988步进驱动程序。
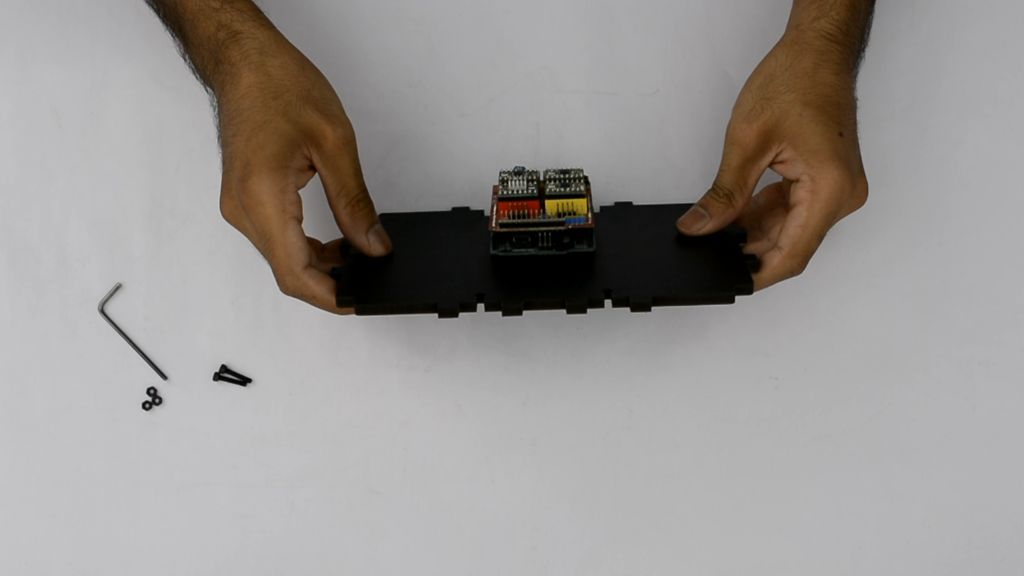
步骤11:组装底部和前面板



要组装底部和前面板,我们需要以下部件:
激光切割前面板
底部面板与电子元件组装
6x M3x15螺栓
6x M3螺母
3D打印式烧杯架
将底部面板插入前面板的下部插槽中,并使用M3x15螺栓和M3螺母进行固定。然后使用M3x15螺栓和M3螺母将3D打印式烧杯架固定到位。
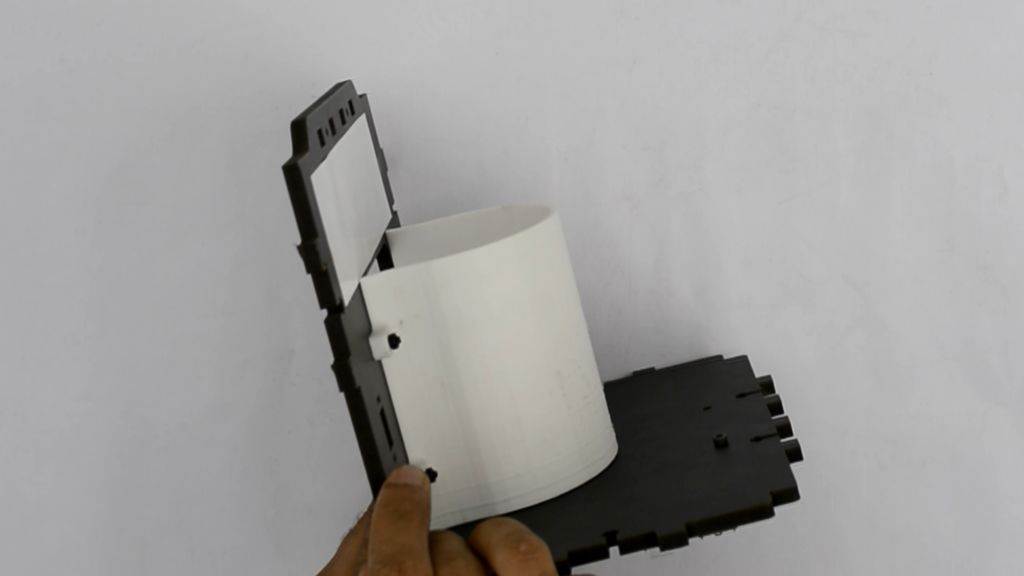
步骤12:将管插入3D打印管支架


要组装底部和前面板,我们需要以下部件:
完全组装后面板
3D打印管支架
In此步骤,将所有四个管插入3D打印管支架的孔中。并确保一些管子穿过支架突出。
步骤13:将四个面板组装在一起
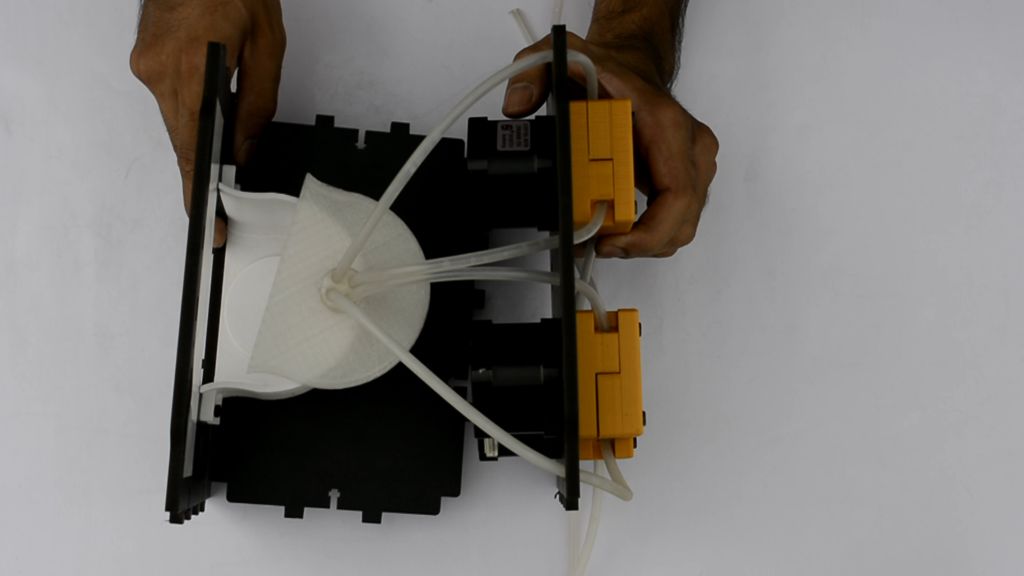
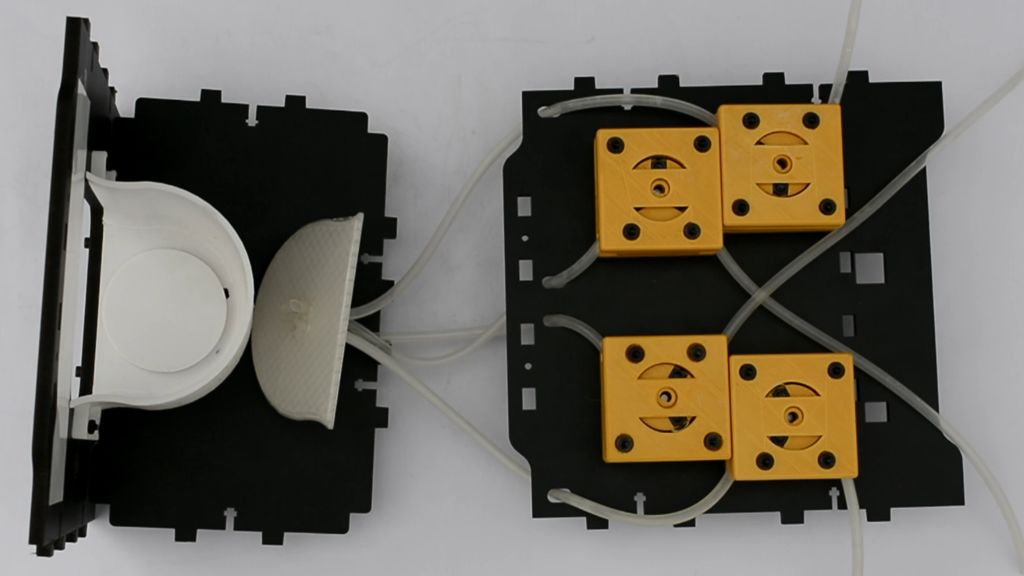

要组装正面,背面,顶部和底部面板,我们需要以下部件:
前面板和底部面板组件
后面板组件
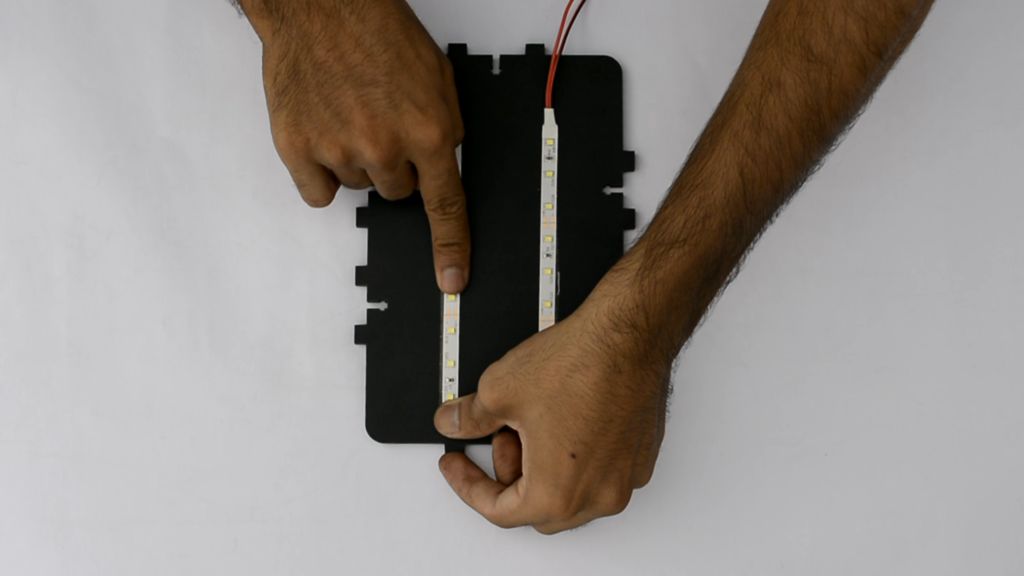
顶部面板
冷白条带
要组装所有这些面板,首先将管架固定在烧杯架顶部。然后将LED灯条粘贴在顶部面板的底面上,然后将顶部面板插入后面板和前面板的插槽中。
步骤14:组装电机线和侧面板





To组装电机线和侧板我们将需要以下部件:
组装四个面板
4x电机线
侧板
24x M3x15螺栓
24x M3螺母
M3内六角扳手
将电线插入电机插槽并关闭两侧面板。并使用M3x15螺栓和M3螺母修复面板。
步骤15:接线
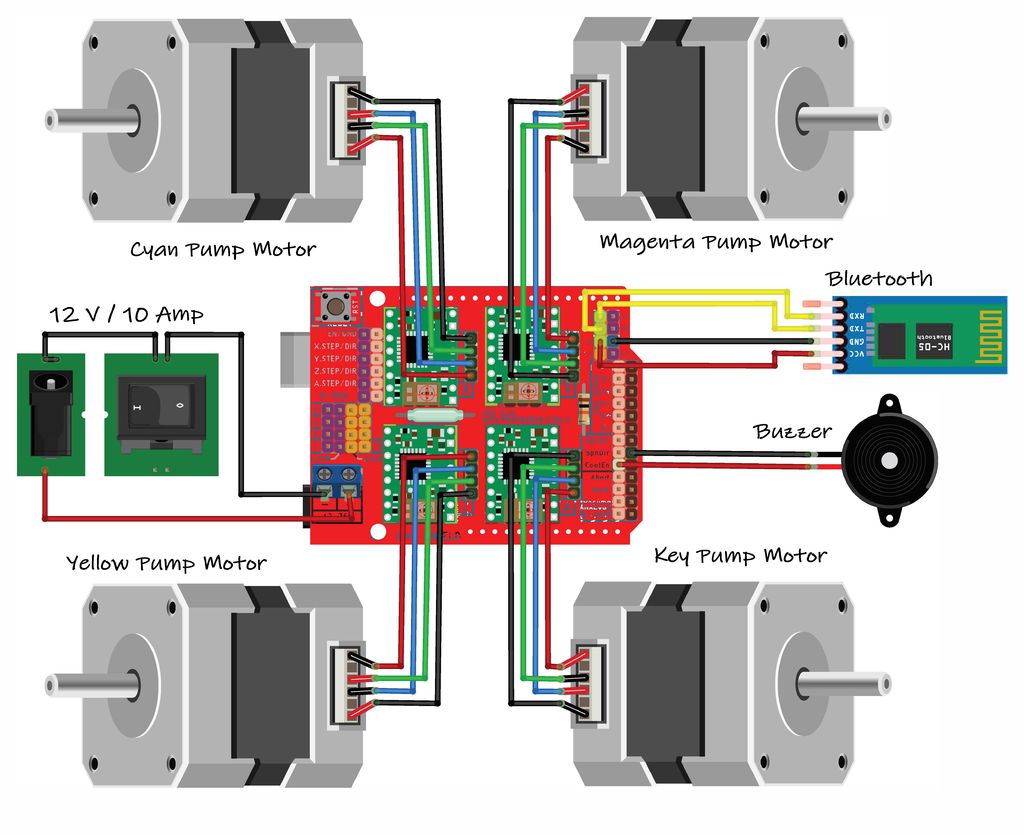
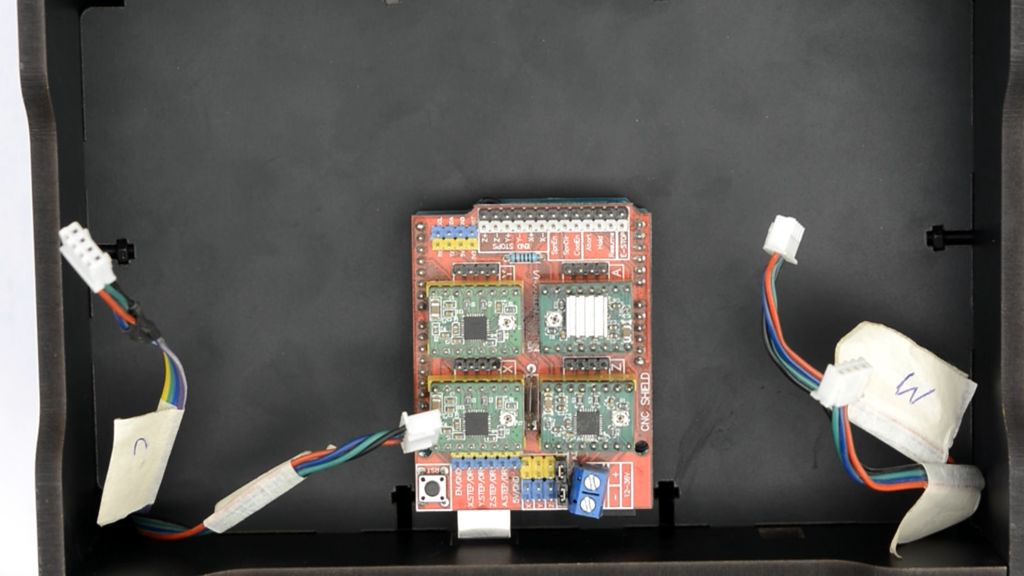
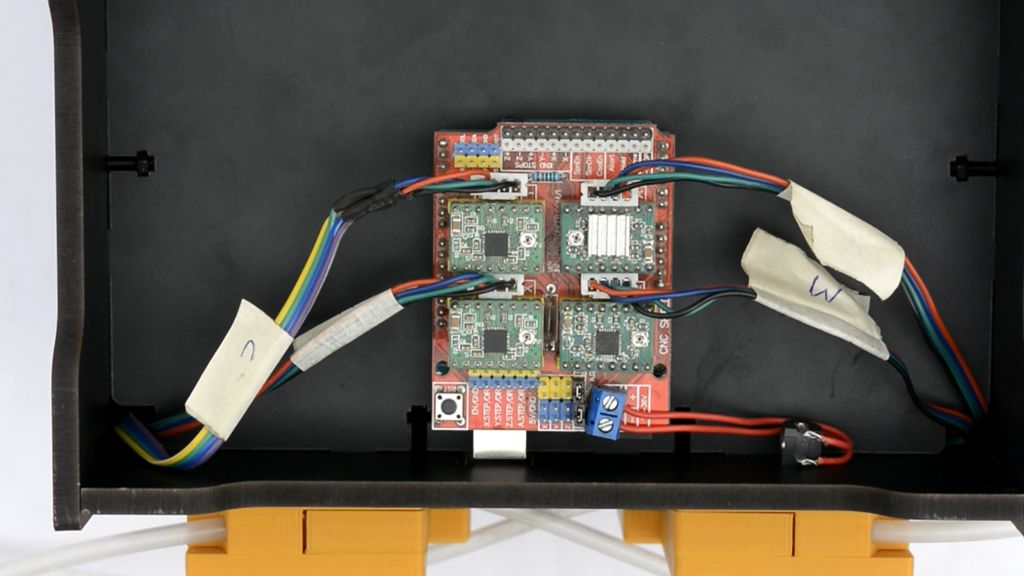
按照原理图通过以下方式连接所有电子设备:
将DC插孔固定在后面板的插槽中并连接连接到GRBL Shield的电源端子。
然后,将电机的电线插入步进驱动器端子,如下所示 -
X -Stepper Driver(GRBL Shield) - 青色电机线
Y-Stepper驱动器(GRBL Shield) - 洋红色电机线
Z-Stepper驱动器(GRBL屏蔽) - 黄色电机线
A步进驱动器(GRBL Shield) - 关键电机线
注意:将GRBL Shield的A步和A方向跳线分别连接到引脚12和引脚13 。 ( A-Step和A-Direction的跳线可在电源端子上方使用)
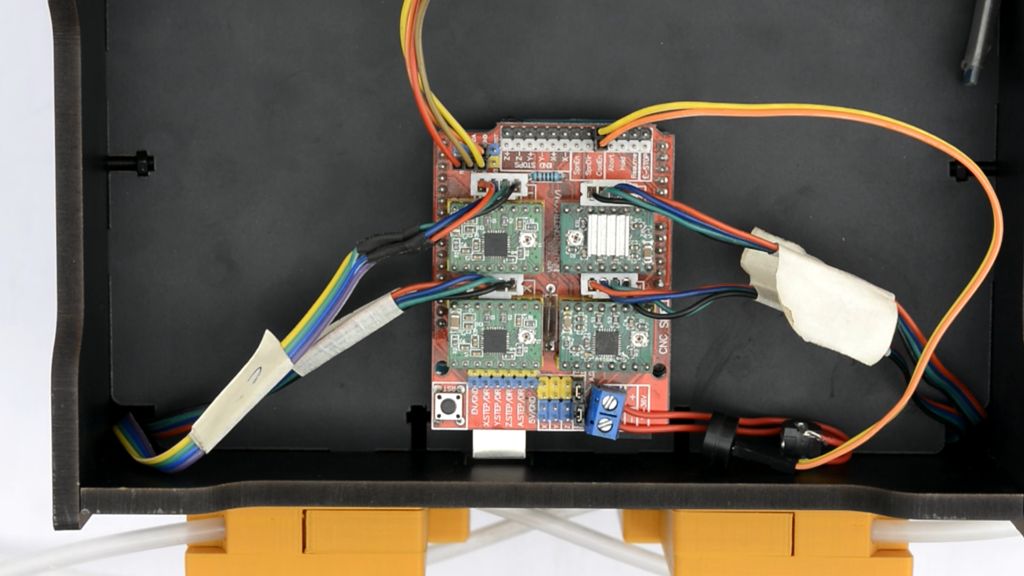
在以下终端中连接HC-05蓝牙 -
GND(HC-05) - GND(GRBL Shield)
5V(HC-05) - 5V(GRBL Shield)
RX(HC-05) - TX(GRBL Shield)
TX(HC-05) - RX(GRBL Shield)
连接以下蜂鸣器端子 -
-ve(蜂鸣器) - GND(GRBL Shield)
+ ve(蜂鸣器) - CoolEn Pin(GRBL Shield)
注意:为此机器供电至少12V/10Amp电源。
步骤16:电机校准
之后给机器供电,通过USB线将Arduino连接到计算机,将校准固件安装到Arduino Uno。
下载下面给出的校准代码并将其上传到Arduino Uno并执行以下说明进行校准所有电机步骤。
上传代码后,打开波特率为38400的串口监视器并同时启用CR和NL。
现在命令校准电机泵:
START
“泵到校准”参数需要命令Arduino到哪个电机进行校准并且可以取值:
C =》 For Cyan Motor
M =》 For Magenta Motor
Y =》 For Yellow Motor
K =》 For Key Motor
等待泵将颜色加载到tu中加载后,如果有一些颜色拼写,请清洁烧瓶,Arduino将等到您发送确认命令开始校准。发送“是”(不带引号)开始校准。
现在电机将颜色泵入我们将要使用量筒测量的烧瓶中。
一旦我们得到泵浦颜色的测量值,我们可以使用给定的公式找出所选电机的每单位步数(ml):
5000 (Default steps)
Steps Per ML = --------------------
Measured Value
现在将主代码中每个电机的每单位步数(ml)值放在给定的常量中:
line 7) const float Cspu =》 Holds the value for Steps per Unit of Cyan Motor
line 8) const float Mspu =》 Holds the value for Steps per Unit of Magenta Motor
line 9) const float Yspu =》 Holds the value for Steps per Unit of Yellow Motor
line 10) const float Kspu =》 Holds the value for Steps per Unit of Key Motor
注意:所有步骤和校准期间,串行监视器将显示正确校准电机的步骤。
步骤17:编码
校准电机后,下载制作颜色的主要代码的时间。
下载下面给出的主代码并将其上传到Arduino Uno并使用可用命令来使用本机:
LOAD =》 Used to load the color pigment into the silicon tube.
CLEAN =》 Used to unload the color pigment into the silicon tube.
SPEED =》 Used to update the pumping speed of the device.
take the integer value representing the RPM of the motors.
Default is set 100 and can be updated from 100 to 400.
PUMP =》 Used to command the device to make desired colour.
takes the integer value representing Red value.
takes the integer value representing Green value.
takes the integer value representing Blue value.
takes the integer value representing the volume of white colour.
注意:在使用此代码之前,请务必更新校准代码中每个电机的默认步数值。
步骤18:我们已完成!!

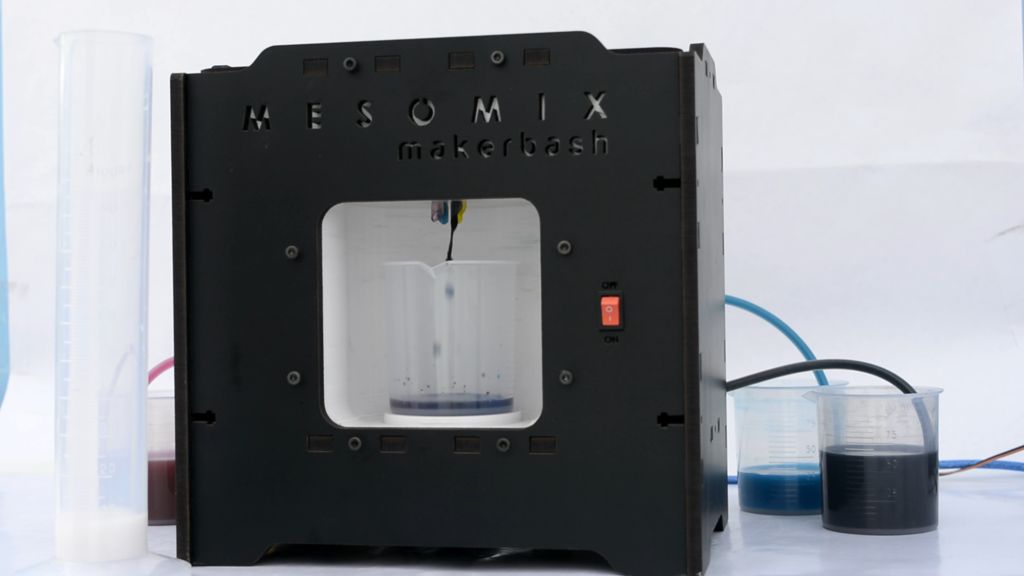
你终于完成了!以下是最终产品的外观和工作方式。
点击此处查看实际操作
步骤19:未来范围
因为它是我的第一个原型,它比我预期的好得多但是它需要大量优化。
以下是我正在寻找下一个版本的一些升级这台机器 -
尝试不同的油墨,颜色,油漆和颜料。
开发Android应用程序,通过使用我们已安装的蓝牙,可以提供更好的用户界面。
安装显示器和旋转编码器,使其成为独立设备。
将寻找更好,更可靠的泵送选项。
安装Google协助,使其更具响应性和智慧。
-
 huangxl407
2019-09-28
0 回复 举报请问,你这是往哪里用的? 收起回复
huangxl407
2019-09-28
0 回复 举报请问,你这是往哪里用的? 收起回复
- 相关推荐
- 热点推荐
- 监视器
-
混合机链轮轴磨损还在用补焊修?2022-12-06 530
-
制作一个自动咖啡机2022-06-28 3938
-
UVLED固化机可应用于家具UV油漆固化2020-11-24 1197
-
无重力混合机的工作原理是什么?2020-03-19 1169
-
东京科学家在研究生物混合机器人上取得重大突破2018-08-13 1151
-
混合机、分散机和搅拌机及研磨机对于不同产品的应用研究2017-09-21 984
-
会讯通:模拟交流机、数模混合机、数字程控交换机的差别2016-12-14 2748
-
提升料斗混合机源程序2016-12-10 765
-
胆石混合功放的新制作2016-03-10 1946
-
2012年沙特工程机械展/沙特混合机/沙特开凿机推土机卡车/沙2012-01-11 2290
-
胆石混合功放及石机功放制作电路图2010-11-05 29774
-
[原创]2010年沙特机械展|吊车|起重机|客车|货车|重工机械|混合机|2010-05-11 2167
-
基于粒子群算法的随机和模糊混合机会约束规划研究2009-09-23 703
-
立式混合机温控系统分析与设计2009-06-24 601
全部0条评论

快来发表一下你的评论吧 !
