

自动驾驶时代的前夜 巡航功能技术的变迁
汽车电子
描述
从汽车被创造出来那天起,对自动驾驶能力的渴求就成了一代代工程师攻坚的方向。而自适应巡航控制(Adaptive Cruise Control,简称『ACC』)的出现则让普通消费者开始对自动驾驶汽车有了期待和畅想。回到 20 世纪,汽车制造商们开始从 17 世纪工程师们的成果上寻找灵感,最终 1958 款的克莱斯勒帝国(Chrysler Imperial)成了全世界第一台搭载驾驶辅助系统的车型。
这台老爷车当时配备的这套系统也叫做「autopilot」,不过和特斯拉没什么关系。它接在发动机的驱动轮轴上,仪表台的地方有一个拨盘可以设置巡航速度,还有一台另加的电机通过调整档位来维持车速。尽管现在量产车上使用的 ACC 系统经过漫长的技术迭代已经和之前的大不一样了,但殊途同归,目的都是让驾驶尽可能地实现自动化。
1958 款克莱斯勒帝国车型搭载了一套 Auto-Pilot 定速巡航系统 | GRautogallery
虽然真正意义上的自动驾驶汽车还没有走入消费市场,但自适应巡航系统的应用让用户得以提前一窥无人车时代的端倪。系统开启后,车辆能够按照设定的跟车距离行驶,通过不断调整车速来维持两车的距离。驾驶员这个时候仍需要双手握住方向盘,除非出现紧急情况,否则不需要对车辆进行干预。
回望这项功能的发展史,我们可以看到它技术的迭代与升级,以及依靠体验逐渐积累和建立的用户信任与满意度,这是自动驾驶时代还不曾拥有的。
巡航功能的技术变迁
首先要明确的一点是,巡航功能,不管是定速巡航还是自适应巡航,都算不上是安全功能,它们最大的作用是让开车这件劳心费神的事儿变得舒心一些。而定速巡航(Cruise Control)作为鼻祖式的存在,最早可以追溯到 1788 年,当时詹姆斯·瓦特(James Watt)和马修·博尔顿(Matthew Boulton)用它来控制蒸汽机的运行,而调速器这种装置(Cruise Control 也是调速器的一种)则在 17 世纪就得到了应用。
之后演变而来的定速巡航装置则是由发明家和机械工程师拉尔夫·蒂托(Ralph Teetor)于 1948 年发明的,首次搭载这套系统的车型正是 1958 年上市的克莱斯勒帝国。
从技术原理上来看,定速巡航由 EMS 进行控制,EMS 会同时参考变速箱信号、当前车速和驾驶员设定速度,通过调整节气门开度和变速箱等控制单元对车速进行调整,实现巡航。
开启自适应巡航功能的特斯拉仪表界面 | Electrek
只不过随着整个社会的进步,道路交通也变得越来越复杂,只是控制车速已经不能让驾驶过程变得舒适了,这个时候自适应巡航系统就上线了。
顾名思义,这套系统的关键在于「自适应」三个字。它借助外部传感器(雷达、摄像头、激光传感器等)检测自车与前方车辆的距离和相对速度,并控制自身车速和前车保持固定的距离。假设前车变道离开,在未识别到新的目标物之前,它会控制车辆按照设定的车速行驶。
从可实现的功能等级来看,目前主流的 ACC 系统还可以分为两类:
自适应巡航。自动加减速,让车辆按照预设的速度或者与前车保持一定距离行驶。低于一定速度退出,一般是 30 公里/小时;
自适应巡航+自动启停 (Stop & Go)。能以任何速度进行巡航,包括在完全停止后随着前车的移动而恢复之前的行驶状态。
《消费者报告》针对 ACC 功能的用户调研结果 | Consumer Reports
在美国《消费者报告》进行的一项关于「高级安全系统」的用户调研中,有 85% 的车主对 ACC「非常满意」,有 19% 的用户表示自适应巡航系统帮助他们成功避免了一次交通事故的发生,72% 的受访者对这套系统足够信任。
虽然从用户的角度来看,自适应只比定速巡航复杂了那么一点点,但从汽车工程层面来看,两项技术实现起来的难度完全不是一个等级的。
ACC 因为涉及到汽车的自动加减速控制,不但需要发动机管理系统 EMS 参与控制,自动变速箱控制器 TCU,电子稳定程序 ESP 以及电子驻车 EPB 都要介入,这其中还涉及到更复杂的人机交互界面设计和雷达、摄像头等外部传感器的管控。虽然成本不可避免地增加了,但它对驾驶体验的提升效果也是十分明显。特别是在高速公路上,可以大幅缓解人的紧张情绪。
如果说自动变速箱解放了人的左脚,自适应巡航解放了人的右脚,那么下一代的领航技术(autopilot)则让我们的双手得以短暂松开方向盘,朝着自动化驾驶的方向逐步迈进。
奔驰是最早让这项技术上车的主机厂。2013 年发布的最新一代奔驰 S 级车型搭载了「Distronic Plus with Steering Assist」智能系统。它本质上是在 ACC 的基础上增加了转向辅助的功能,这样系统能够自动控制方向盘转动,实现车道保持或低速工况下随前车小幅横向摆动的功能,从而让驾驶员的双手也得以解放出来。
功能的更进一步也意味着新硬件的升级。要对转向控制就必须有前视摄像头的加入,利用人工智能算法实现对车道线的检测,弥补了雷达传感器的缺陷(比如纵向速度和距离测量精度高,但横向较差)。而要更进一步,实现全速度范围内的加减速以及获得主动变道的能力,则需要更多传感器以及控制、执行机构的配合。当然,车辆的电控单元的数量也会大幅增加,软件算法以及量产前的测试工作都会相应变得很复杂。
特斯拉的 Autopilot 从功能构成上来看,主要是由自适应巡航和自动转向组成的。只不过特斯拉把它叫做「Traffic-Aware Cruise Control(TACC)」。至于自动转向,除了能够实现车道保持外,更新至最新版本的 Autopilot 上线了「Navigate on Autopilot」功能,它能够在不提示车主的情况下实现自动变道。由于还是 beta 版本,实际体验中系统经常在不合理的时机变道,没有减轻压力不说,倒是先把人吓得一身冷汗。美国《消费者报告》的试驾编辑调侃道,「这种感觉就像看着你的孩子开车一样,心惊肉跳,亚历山大!」。
用户可以自行选择将变道提示关掉,Autopilot 系统能够实现自动变动 | Engadget
不过特斯拉已经算是在巡航和转向功能上优化做得很不错的品牌了,随着 FSD 硬件平台的投入,未来也会在「TACC+Auto Steer」的基础上释放更多的自动驾驶能力。而根据《消费者报告》的调研显示,除了特斯拉,凯迪拉克、福特、现代捷恩斯,林肯、奔驰、保时捷、沃尔沃车型搭载的 ACC 功能表现最佳。
ACC 的工作原理和局限性
正如上面所提到的,实现 ACC 功能最关键的是雷达传感器。系统开启后,雷达对前车最远的探测距离可以达到 200 米,一旦检测到目标物,自车车速下降并维持设定的距离进行巡航。
为了保持距离,雷达会向监测两车距离的中央控制单元发送信号。以特斯拉的 Autopilot 为例,如果探测到前方有车辆,主动巡航控制可在任意车速下(静止下也可以)启动,但前提是自车与前车至少相距 150 厘米。一旦前车变道离开,系统会控制车辆加速至预设的速度行驶。而设定巡航速度的话,以特斯拉 Model 3 为例,将巡航控制杆向下移动到底一次,然后松开。这样可以将巡航速度设为检测到的速度限制或当前行驶速度,以较高速度为准。
假设行驶在多车道的公共道路上,传感器检测到前方出现多个可追踪的车辆,这个时候 ACC 系统会进行甄别并选择优先目标进行跟车。如果有其他车辆超过了自车,ACC 会实施发动机管理并进行刹车,将车速逐步降下来。假设系统判定需要进行急刹,但减速过程消耗的能量超过了车辆能够提供最大刹车动能的 30%,那么仪表上就会出现视觉信号并发出蜂鸣警报,提醒驾驶员手动进行刹车操作。
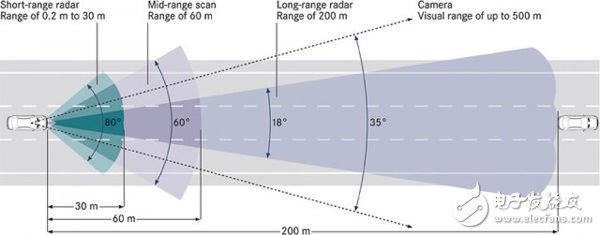
一套 ACC 系统主要由雷达和摄像头两种传感器组成 | Extremtech
尽管目前各家的 ACC 技术已经非常成熟了,但由于传感器硬件存在局限性,首当其冲,在天气恶劣的情况下使用会受到影响,也存在一定的安全隐患。譬如遇到大雨或大雪天气,位于前格栅或前挡泥板下的传感器可能会因无法正常工作失灵。特斯拉 Model 3 的用户手册中就提示了下列几种不宜开启主动巡航控制的情况:
道路有急转弯
能见度差(因大雨、大雪、浓雾等造成)
强光(比如迎面而来的前照灯灯光或直射的阳光)妨碍摄像头视野时
雷达传感器被遮挡(灰尘、遮盖等)
挡风玻璃阻挡摄像头的视野(水雾、尘土或贴纸遮挡等)
此外,就 ACC 本身而言,它的传感器配置现在是没办法应对变化的道路限速的。这也是为什么绝大多数品牌都建议用户在高速公路或环城高速等结构化道路上使用,因为这些地方的限速情况统一,基本不会有什么幺蛾子发生。比如凯迪拉克的 Super Cruise 就严格设定了可开启的范围(完成高精度地图绘制的高速公路区域)。
还有就是在上面提到的多车道情况下,由于 ACC 系统配置的软硬件能力有限,所以在遇到多个目标物的时候很可能会出现识别错误的情况。特别是有弯道的情况下,识别前车的错误率会更高一些。
通用 Super Cruise 系统有着严格的 ODD 限定,只能在绘制了高精度地图的高速公路使用 | Consumer Reports
所以尽管 ACC 本身用起来可以增加驾驶的舒适性,但因为它依然不是真正的自动驾驶技术,所以不能完全依赖。一旦系统提醒可能需要接管的时候,一定要毫不犹豫地踩下刹车,避免意外情况的发生。
迈向自动驾驶时代的前夜
现阶段,自适应巡航系统还远远不能提供完整的自动驾驶体验,但从《消费者报告》的用户调研来看,目前大家对这项功能的满意度和信任度非常高。就能力而言,绝大多数的 ACC 系统能够做到与前车保持时距行驶,这已经从某种程度上解放了司机们的双脚。更先进更智能的,比如通用的 Super Cruise,尽管它的 ODD(Operational Design Domain,设计适用范围)被限制得非常死,但在合适的工况下也算是完全实现了解放双手。
随着软件算法以及传感器硬件能力的提升,ACC 自然也会变得功能越来越复杂,这意味着机器将获得越来越多的控制权,同时驾驶体验有望得到大幅提升。更关键的是,因为体验的提升人们的信任和满意也许会因此逐渐「流向」自动驾驶,而不是因为那些酷炫的 Demo 和演示视频。
借着自动驾驶技术进步的浪潮,我们完全可以期待「人」的监管角色的逐步退场,以及人和机器以协同配合的方式完成一次又一次的安全出行。
-
FPGA在自动驾驶领域有哪些优势?2024-07-29 8207
-
谷歌的自动驾驶汽车是酱紫实现的吗?2011-06-14 4836
-
汽车自动驾驶技术2016-04-14 5613
-
【话题】特斯拉首起自动驾驶致命车祸,自动驾驶的冬天来了?2016-07-05 14384
-
自动驾驶真的会来吗?2016-07-21 14608
-
细说关于自动驾驶那些事儿2017-05-15 7238
-
自动驾驶的到来2017-06-08 7482
-
UWB主动定位系统在自动驾驶中的应用实践2018-12-14 3322
-
中国自动驾驶行业前景看好,国产技术迅速发展2019-04-03 3162
-
如何让自动驾驶更加安全?2019-05-13 3790
-
自动驾驶汽车的处理能力怎么样?2019-08-07 2931
-
联网安全接受度成自动驾驶的关键2020-08-26 3375
-
自动驾驶系统设计及应用的相关资料分享2021-08-30 2491
-
自动驾驶技术的实现2021-09-03 3269
-
自动驾驶线控底盘VCU功能介绍2021-09-07 3122
全部0条评论

快来发表一下你的评论吧 !
