

如何使用旋转编码器将机械旋转快速转换为数字信号
电子说
描述
在数字时代,需要快速高效地测量电机或旋转仪器旋钮上的机械轴的旋转。诸如电位计和旋转开关之类的模拟方法正在被可将旋转运动直接数字化的旋转编码器所取代,但设计人员需要能够理解各种编码器类型之间的差异,并准确解析编码器的数字输出。
本文将介绍旋转编码器的作用及其工作原理。然后说明如何解释其信号,最后再介绍几个编码器解决方案及其实际应用。
旋转编码器的作用
旋转编码器是一种测量机械轴旋转的传感器。轴可位于电机上,旋转编码器就在这里读取角位置或转速。它们还可以读取仪器或设备前面板上的表盘、旋钮或其他电子控制装置的角位置,替代电位计和旋转开关。
让我们来看看家电上的定时器控制装置。在以前的模拟时代,可使用可变电阻器或电位计来感测该控制装置的位置。利用当今基于微处理器的设计,旋转编码器可生成更高效的数字输入。
编码器还可以用在控制系统中,为机械零件提供反馈,让它进行移动以正确响应控制命令。无论是汽车还是机器人设备中的控制系统,编码器都可以为控制微处理器提供必要的感测。像单匝电位计这样的旧式解决方案感测不到轴的完整旋转,但旋转编码器可感测完整旋转且无需停止。
旋转编码器将这些机械位移转换为可发送到处理器进行解析的电信号。根据编码器的电输出,可以推导出旋转方向、角位置和旋转速度。与电位计相比,旋转编码器的数字输出使得这个过程更简单。
旋转编码器的工作原理
编码器主要有两种类型,增量编码器和绝对编码器。增量编码器读取角度位移的变化,而绝对编码器读取编码轴的绝对角度。它们是使用了三种常用技术来实现的,即光学、机械或磁性技术。
光学编码器采用编码圆盘构造,码盘具有透光和遮光区段,可让光透过特定区域。光电二极管在码盘两侧使用 LED 和光电二极管(图 1),光电二极管检测透过码盘的光,并输出对应码盘区段上透光和遮光图案的脉冲波形。
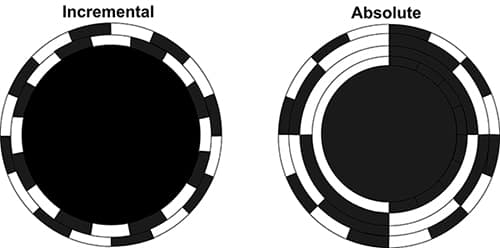
图 1:增量式和绝对式码盘示例。增量式码盘产生两个方波信号,它们之间有 90° 的相位差。绝对式码盘输出二进制编码数据。(图片来源:Digi-Key Electronics)
图 1 中的绝对式码盘有四个输出,为码盘上每个区段提供唯一的二进制代码,在此例中该代码为 16(表 1)。二进制代码的替代方案是格雷码,它是一种相邻二进制字间仅差一个位元改变的二进制代码。
|
表 1:四位绝对编码器的十六个二进制状态。(表格来源:Digi-Key Electronics)
增量式码盘生成的图案由两个方波组成,相位差为 90°,称为正交输出。也可以使用单行图案和两个移位相当于 90° 相移的光电传感器实现此输出。
正交增量编码器的输出通常称为“A”和“B”。编码器还可以包括第三脉冲,每转一次产生一个脉冲,被称为索引脉冲,提供已知的物理参考。通过将索引脉冲与正交输出相结合,可以计算出绝对轴方向。
通过获取两个具有 90° 相移的输出,不仅可以感测角度旋转,还可以感测旋转方向(图 2)。
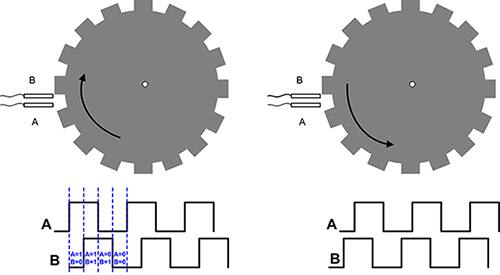
图 2:正交信号之间的相位关系可确定编码器码盘的运动方向。(图片来源:Digi-Key Electronics)
编码器轴顺时针旋转时,A 波形将引导 B 波形。如果旋转方向变为逆时针方向,则信号 B 将引导信号 A。
利用两个正交信号,可以解析每个周期的四种状态。单个周期内的状态为 A = 1 和 B = 0、A = 1 和 B = 1、A = 0 和 B = 1 以及最后的 A = 0 和 B = 0。这意味着正交输出编码器的角度分辨率是每转额定脉冲数 (PPR) 的四倍。
通过在示波器上查看和测量光学编码器的正交输出,可以得到输出之间的相位关系(图 3)。A 信号显示在上方迹线中,而 B 信号显示在下方迹线中。设置示波器相位参数 P1 来测量 A 和 B 信号之间的相位差。两个信号之间的平均相位差为 90.4˚。
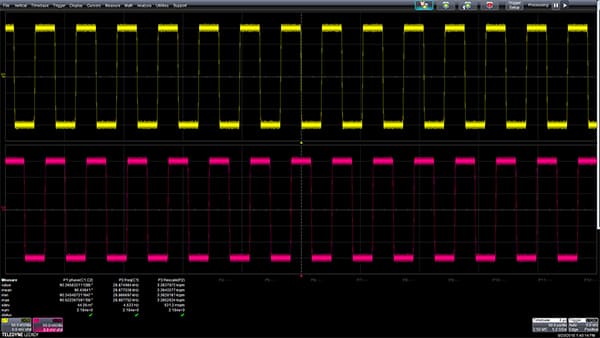
图 3:每转 512 脉冲数光学编码器的正交输出显示了 A 和 B 信号输出间的相位关系(图片来源:Digi-Key Electronics)
在该示例中仅使用单个 A 输出,因为编码器被用作转速计,测量电机的转速。使用示波器参数 P2 测得 A 信号的频率为 28.87 千赫兹 (kHz)。此数值除以每转 512 脉冲数 (PPR) 转换为轴速度,然后乘以 60 得到轴角速度(单位为每分钟转数 (RPM)),即参数 P3 中的读数 3383 RPM。
基于这些数字,该编码器的 512 PPR 可提供 0.7 度的基本分辨率。通过解析 A/B 状态,分辨率则可达 0.175˚。
光学编码器在所有编码器类型中分辨率最高,这是其天生优势。由于其成本较低,因此很适合价格低廉的低端应用。缺点是,它们可能较为笨重。
机械编码器使用一个旋转码盘,其中包含与光学编码器所用图案相同的同心环。在这些同心环中,图案由导电区和绝缘区组成。固定电刷触点在旋转码盘上滑动,与每个环接触,起到开关的作用。随着触点在码盘表面来回刷动,在刷过导电区时进行接触,或在刷过绝缘区时断开。通过这种方式为每个环开发出一个数字图案。
机械编码器可能出现的一个问题是触点抖动会引起噪声。通过使用低通滤波可以消除此类噪声,或在抖动噪声消失后使用软件查看输出状态。
机械编码器通常是最便宜的编码器类型。它们在电子前面板上通常作为用户接口设备,用来取代电位计。
磁性旋转编码器使用了一块多极圆形磁铁。通过霍尔效应或磁阻传感器来检测交替的南北磁极,随着磁铁转动而产生正交电输出。与光学编码器一样,磁性编码器为非接触式,相比接触式机械编码器,操作时速度更高,持续时间更长。
使用旋转编码器
旋转编码器的机电特性要求其与机械装置连接,或需要用户操作。在电子设备上用作控制接口时,编码器会使用实心轴,并且通常使用面板安装衬套安装在控制面板上,同时会使用五金件进行固定。
设计人员可以选择诸如棘爪之类的选件,以便在编码器旋转时引起机械“咔嗒”声,从而为用户提供编码器轴正在移动的触觉反馈。设计人员还可以选择一个瞬时接触开关,通过按下编码器轴来激活。
旨在安装在旋转机器(如电机或伺服电机)上的编码器有空心轴或盲轴两种选择(图 4)。
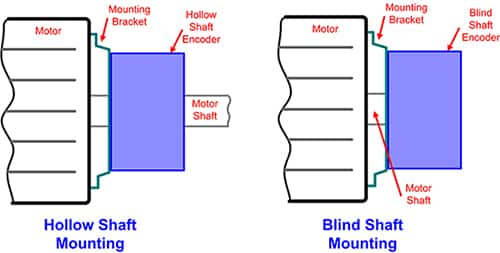
图 4:采用空心轴或盲轴配置的编码器旨在安装在电机或其他机电设备上。(图片来源:Digi-Key Electronics)
空心轴编码器安装在电机或类似机械装置的轴上。这样可确保其与被监控设备同心安装,避免出现不对称或角度误差。盲轴是深度有限的空心轴,用于将编码器安装在电机轴的端部。
编码器选择和应用
旋转编码器的选择取决于应用要求和环境以及成本限制。
CTS Electronic Components 的 291V1022F832AB 是一种光学增量编码器,具有 8 PPR 角度分辨率,采用 5 伏电源供电(图 5)。291 系列支持 4 到 64 PPR 的 PPR 分辨率,提供不同的轴类型和长度以及棘爪选择,还可搭配一个一体式开关。该编码器的额定旋转寿命高达 300 万转。
图 5:旨在用作面板安装控制装置的带有典型螺纹衬套、锁紧垫圈和锁紧螺母的 CTS 291V1022F832AB。(图片来源:CTS)
CTS 291系列光学编码器非常适合用于仪器控制应用,包括医疗和实验室设备、通信、工业、HVAC、运输、安全、音频和家庭娱乐设备。
Bourns Inc. 的 EMS22Q51-D28-LT4 是一款 32 PPR 至 256 PPR 增量式磁性编码器,采用 5 伏或 3.3 伏电源供电。该器件是 EMS22Q 系列非接触式编码器的一员,支持 32 至 256 PPR 角度分辨率。与之前的编码器一样,它具有多种可用的轴和衬套配置,但额定旋转寿命达 5000 万转。这些编码器非常适合用于温度极端、潮湿和存在颗粒污染的恶劣工业环境。
此外,与许多编码器一样,该设备的连接和使用很简单(图 6)。
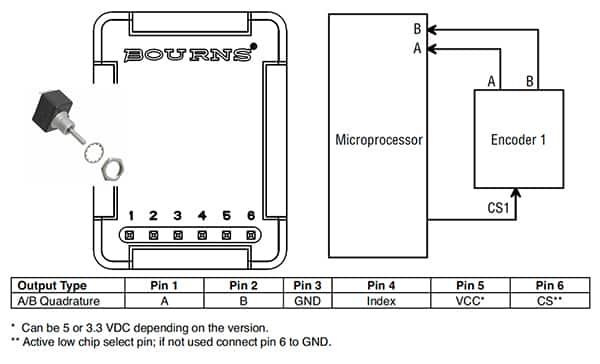
图 6:EMS22Q51-D28-LT4 的引脚详细信息(左侧插图)和框图显示了将 256 PPR 增量磁性非接触式编码器连接到微控制器的简易性。(图片来源:Digi-Key Electronics)
EMS22Q 系列有六个引脚。电源和接地引脚各一个,连接微控制器或微处理器的低有效片选一个,索引引脚一个,数据引脚两个(A 和 B)。得到的正交输出如图 7 所示。
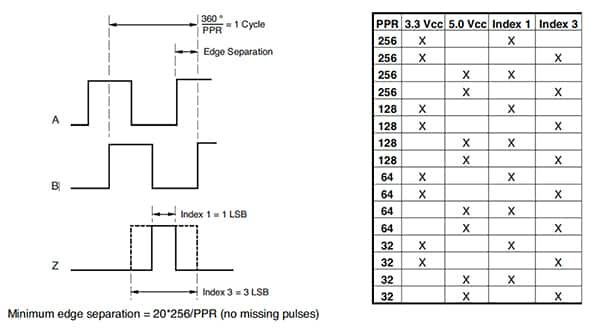
图 7:PPR 范围为 32 至 256 的 EMS22Q 产生的正交输出。(图片来源:Bourns Inc.)
机械编码器对于低成本和业余爱好者应用设备的设计人员来说,非常有用,如 TT Electronics 的 EN11-HSM1AF15 20 PPR 编码器。该编码器属 EN11 系列,提供 15 或 20 PPR 的角度分辨率、各种轴和衬套长度、可选开关以及多种棘爪配置选择。该编码器采用 5 伏电源供电,价格约为光学编码器的十分之一,旋转寿命为 30,000 转。
总结
旋转编码器可快速有效地感测前面板控制装置、机器人手臂或旋转电机轴的角度旋转并进行数字化转换,填补了相关需求。增量编码器或绝对编码器为微处理器或微控制器提供了必要的接口,可感测和控制机电系统组件。
-
 jfliuyong
2019-08-28
0 回复 举报与许多编码器一样,该设备的连接和使用很简单 收起回复
jfliuyong
2019-08-28
0 回复 举报与许多编码器一样,该设备的连接和使用很简单 收起回复
-
旋转编码器的类型以及选择与设计注意要点2024-10-02 1913
-
旋转编码器可以收集并发出什么信号,旋转编码器信号异常怎么处理2024-10-01 3418
-
带Arduino的旋转编码器设计 旋转编码器的工作原理和特点2024-07-04 9191
-
旋转编码器的常见类型2024-05-29 2721
-
如何使用旋转编码器将机械旋转快速转换为数字信号2022-11-25 841
-
增量式旋转编码器设计2021-12-01 2231
-
旋转编码器的作用及工作原理2021-02-22 4624
-
Arduino开发板的旋转编码器如何使用2020-10-26 9445
-
最全旋转编码器接线方法2019-08-06 33767
-
旋转编码器的作用2018-12-04 15389
-
旋转编码器的作用及应用2017-11-10 7562
-
编码器转换为数字信号的电路2015-09-28 4126
-
omron旋转编码器概述2011-09-02 2461
-
旋转式编码器,旋转式编码器是什么意思2010-03-03 2756
全部0条评论

快来发表一下你的评论吧 !
