

机器狗制作全过程图解
电子说
描述
第1步:收集所有零件
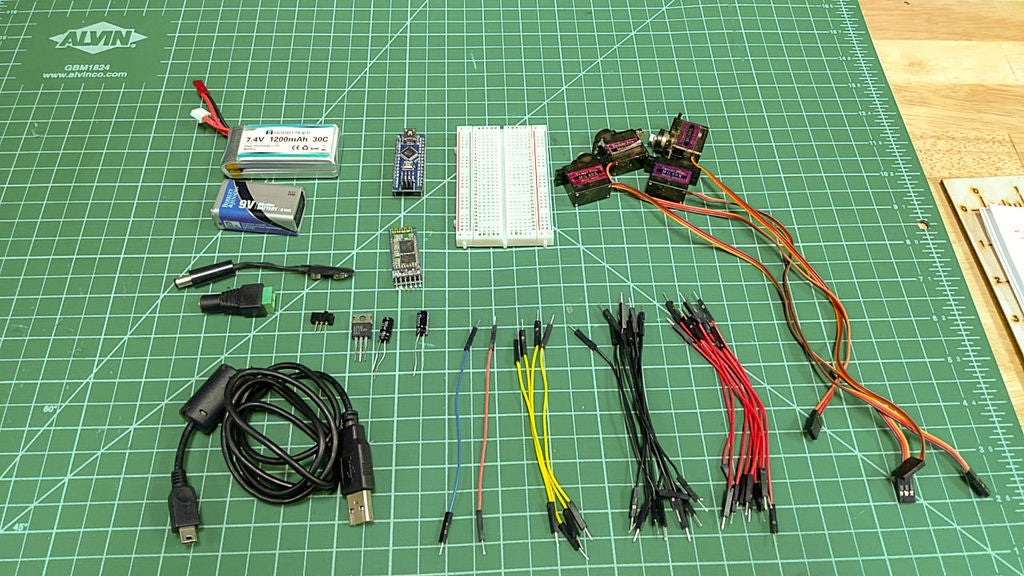
PARTS
4 x Tower Pro MG90S金属齿轮微伺服 Adafruit
您可以购买更便宜的塑料减速电机。
但是,它们并不耐用,也没有经过这个项目的测试。
1 x Arduino Nano Arduino
你可以使用任何Arduino。 Nano非常适合面包板
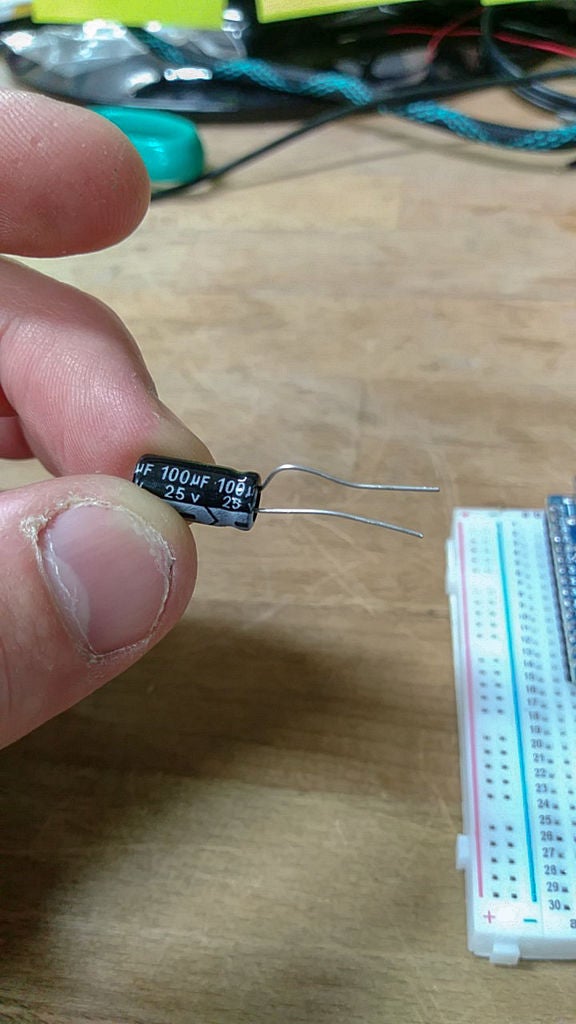
2 x 100uF电解电容器 Adafruit
需要这些来消除功率供应伺服电机并防止反电动势进入电池。我见过使用二极管,但从未尝试过。
1 x 5 V稳压器 SparkFun
这会使电池的电压达到5伏。使用稳压电源,您的伺服电机可以使用更长时间,性能更佳。
1 x HC-05或HC-06蓝牙模块 NewEgg
HC-06只能 接收 输入,而HC-05是 收发器 ,这意味着它可以 接收 和 传输 数据。重要的是要知道您正在使用哪种类型的故障排除错误以及在设置应用程序时知道要连接的内容。如果您希望DoggoBot与您“交谈”,请使用HC-05。如果您希望DoggoBot只“倾听”您,请使用HC-06。
1 x半尺寸面包板 Adafruit
半尺寸面包板适合所有组件,但较大的面包板也可以正常工作。
1 x 7.4 1200 mah LiPo电池 NewEgg
舵机每个需要5伏和几百毫安。这种LiPo电池可以提供足够的毫安,我们可以轻松地将7.4伏电压调节到5伏。额外的好处是电池是可充电的。充电LiPo电池时要小心。此列表中的电池和充电器匹配并且可以很好地协同工作。
1 x LiPo电池充电器 NewEgg
上述电池的充电器。再次充电LiPo电池时要小心。不要让他们一夜之间充电。
1 x 9伏电池亚马逊
在尝试使用Arduino和伺服器时遇到了一些问题LiPo电池。最简单的解决方案是使用9伏电池单独为Arduino供电。 9伏特为Arduino提供足够的毫安,以控制伺服系统并为蓝牙模块供电。
1 x SPDT开关 Adafruit
这可让您关闭电池组,从而切断电源。调试代码时,没有腿移动会很有帮助。
DC Barrel Jack Adapter Sparkfun
这用于将Arduino连接到9伏电池。我发现这个非常有用,因为你不需要焊接任何东西。您可以使用一对跳线作为正极和负极,然后使用Arduino的Vcc和GND引脚将端部放入面包板行。
9伏电池桶式插孔适配器 Sparkfun
用于将9伏电池连接到Arduino。
男性对男性跳线 SparkFun
与M&Ms非常相似,颜色在这里并不重要。内部仍然是相同的材料。但是,我发现对电源,接地和信号线等颜色进行颜色编码非常有帮助。说明书使用特定颜色的东西,但随意使用你喜欢的任何颜色。这是我列出的每种颜色的数量。
1 x蓝色1 x橙色
4 x黄色
9 x黑色9 x红色
可选零件
纸张紧固件订书钉
如果不这样做有权使用3D打印机,您可以随时使用纸质紧固件。任何销售静止的地方都应该有一些。中小尺寸效果很好。
遮蔽胶带订书钉
如果您没有热胶枪,您可以随时使用胶带来固定碎片一起。遮蔽胶带易于使用,但粘性可能因品牌而异。廉价的东西往往不能把事情搞得一团糟。花几美分,你以后会感谢我。
激光切割文件
如果您没有激光切割机,可以使用此文件作为切割指南手工零件。我用激光切割机制作了部件的标签和插槽,这些都是手工操作的难点。标签和插槽使腿部更容易组合,确保每条腿都是方形的。您可以随时将测量结果概括为矩形,并将部件从一些废纸板上切割下来。 该文件采用ai和svg格式。请参阅随附的zip文件,了解所有必要的零件文件和代码。
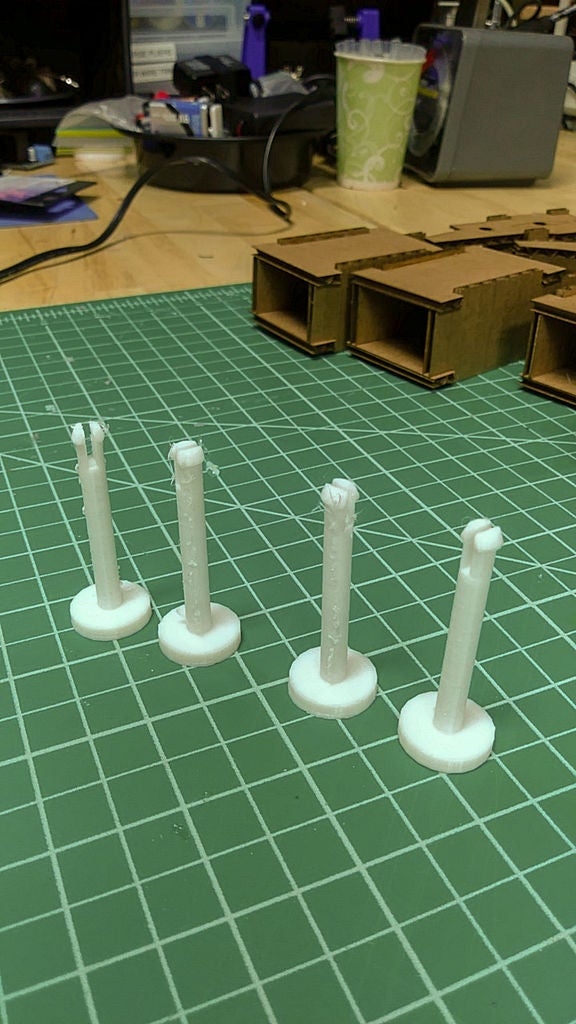
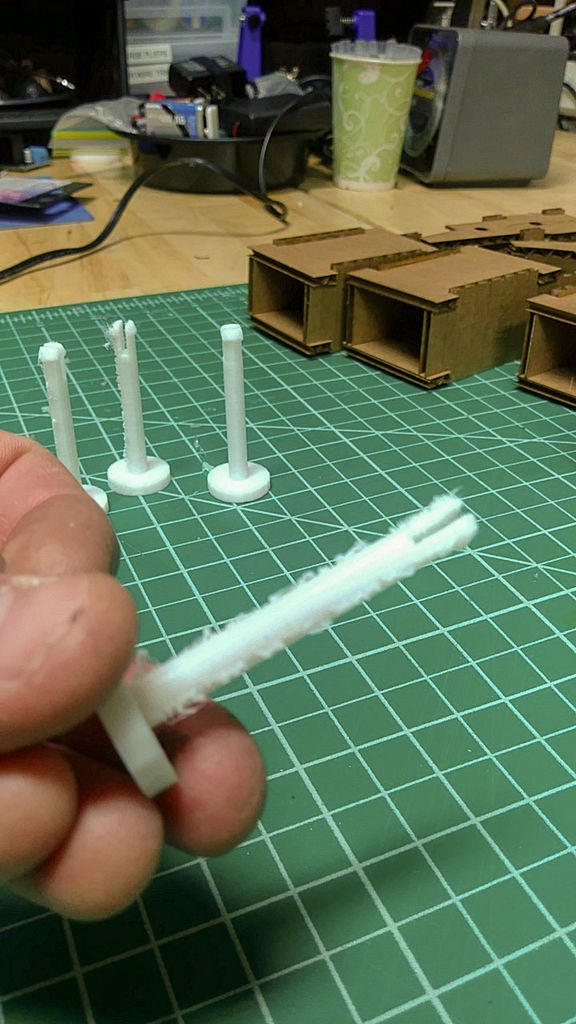
3D打印零件
只有要打印的部分是每个支腿的铰链销,可以用两个纸紧固件代替。铰链销使得上腿和下腿非常容易组合,并且比纸紧固件更平滑。虽然,如果您无法使用3D打印机,纸张紧固件可以正常工作。 该文件采用stl格式。请参阅随附的zip文件,了解所有必要的零件文件和代码。
工具
热胶枪
DIY工具包中的一个重要工具。这些可以从99美分商店,工艺品商店,家得宝,亚马逊等商店购买。
胶枪棒
你需要一堆。很难说确切数量,但我估计我使用了10到15个常规尺寸。如果你愿意,你可以随时购买更长的。
激光切割机技能磨坊NYC
这些更难获得。它们的价格昂贵,需要通风。使用Google搜索创客空间以查找要使用的本地空间或搜索在线服务以将您的零件发送给您。纽约Skill Mill提供激光切割服务和课程。
3D打印机 Skill Mill NYC
与激光切割机相同。虽然这些年来的价格有所下降。我以低于300美元的价格买了一个,虽然确实需要进行大量的故障排除才能做到正确。像激光切割机一样,有在线服务可以将您的零件发送给您或搜索您附近的创客空间。 Skill Mill NYC还提供3D打印服务和设计课程。
打孔器
实际刀具《剪刀
这些只是额外的工具,可能会派上用场。
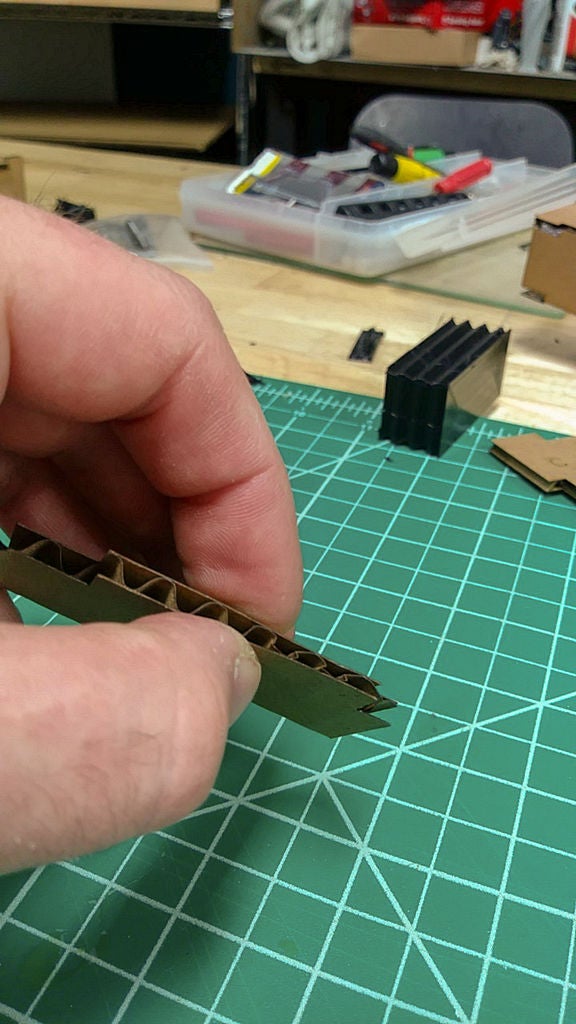
第2步:组装腿
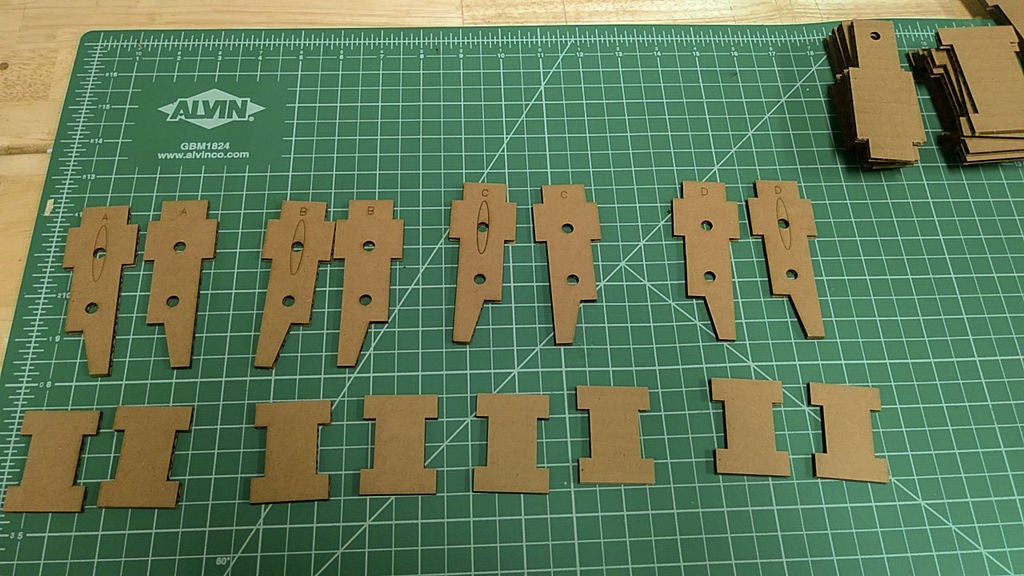


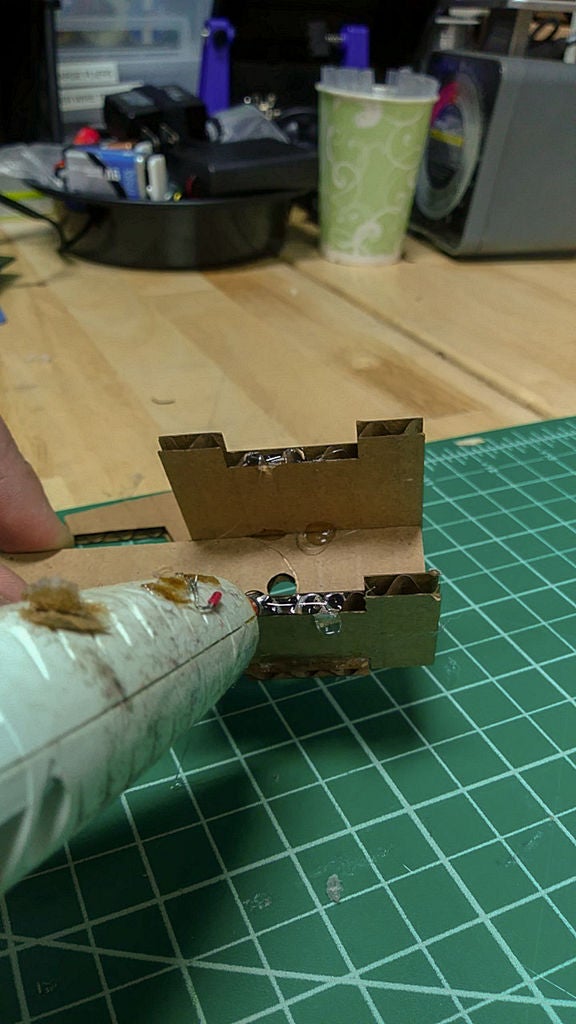



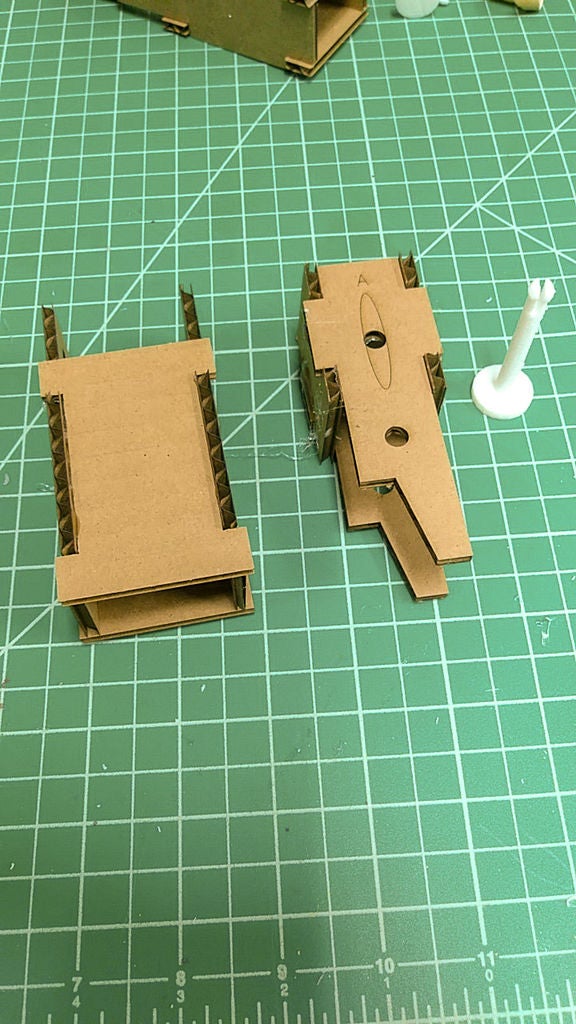
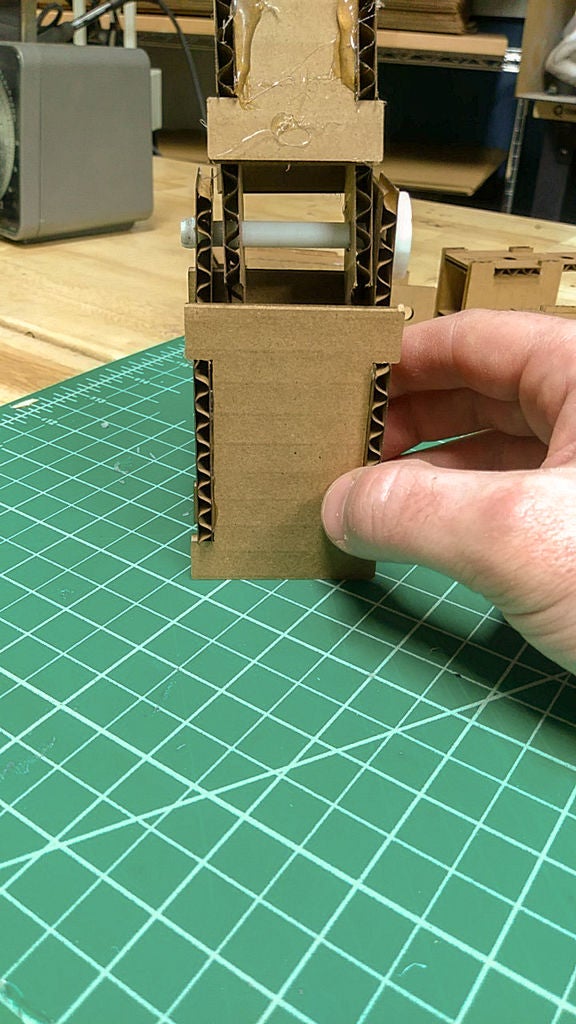
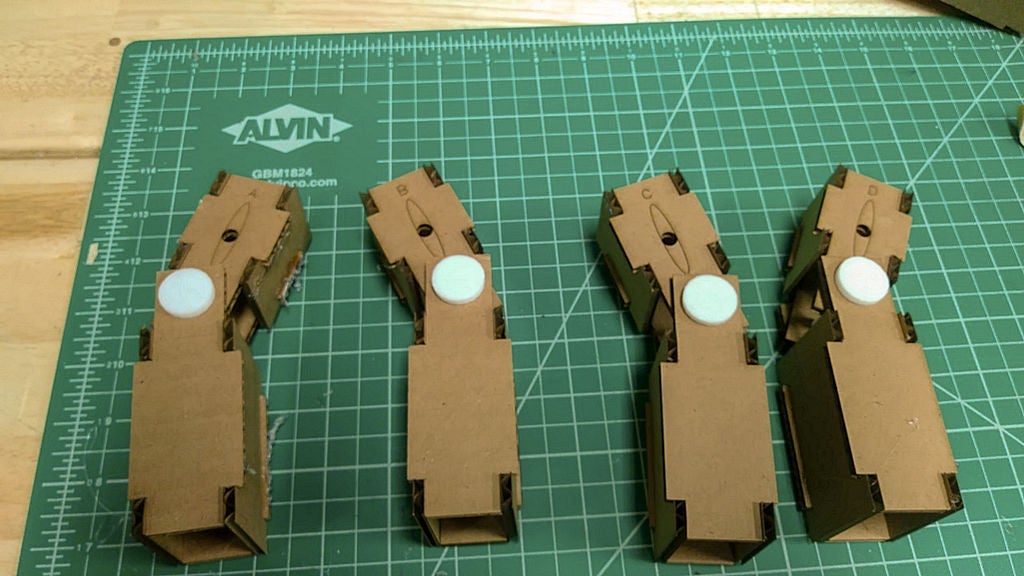
让我们把腿放在一起。你将需要腿部,热胶枪和3D打印部件。
我们将首先组装大腿。按照这些说明和图片一起使用。尽量不要过多地考虑这些。我试图让这个尽可能简单地拼凑起来。真的只有两个步骤,你可以出错,所以需要注意细节。完成腿部A后,您只需要为剩下的3条腿重复这些步骤。
1。插上热胶枪。
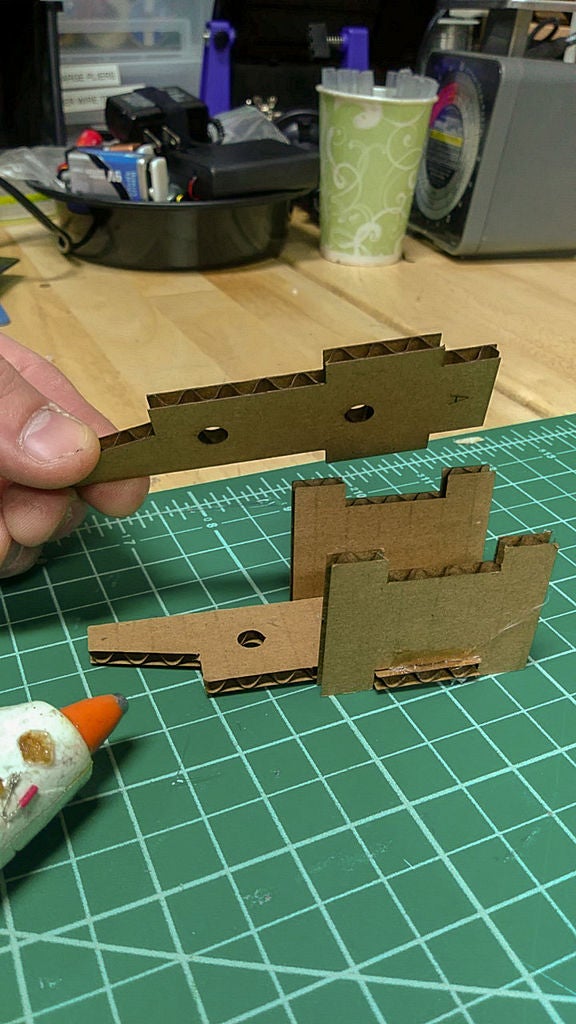
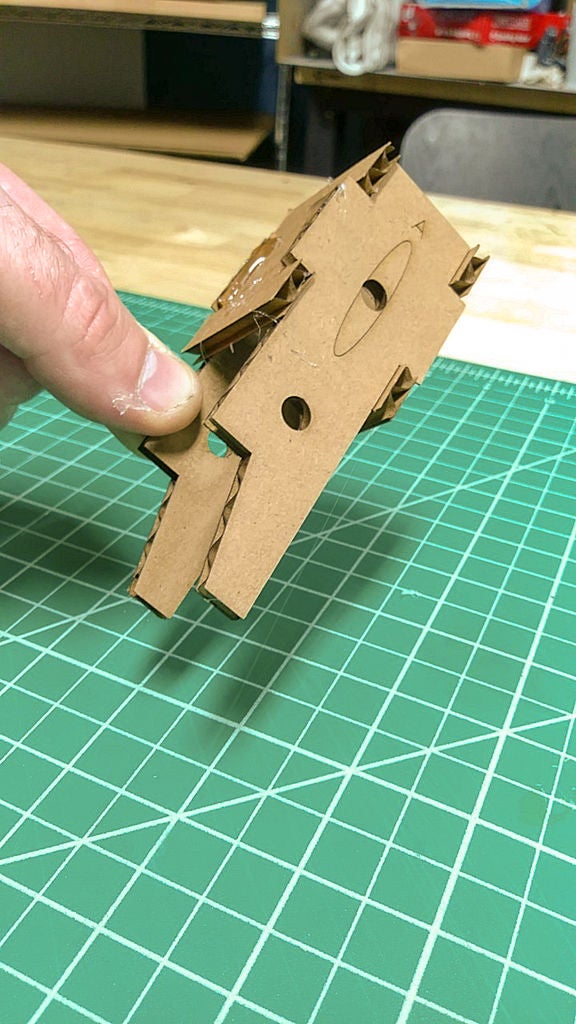
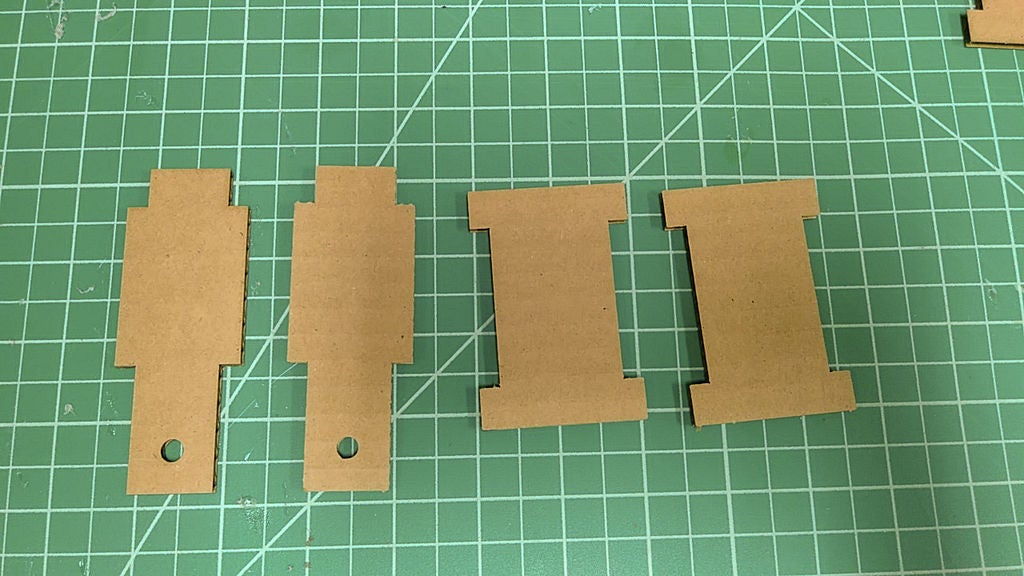
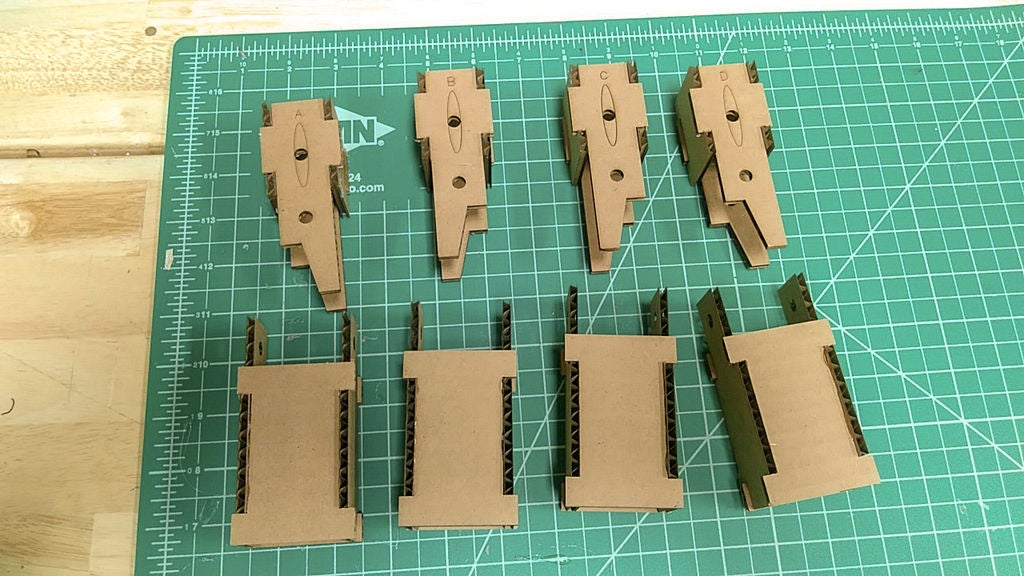
2。抓住标有A的两个大腿部分和两个小的I梁。
3。用A下面的椭圆和一个小I梁抓住上腿部分。
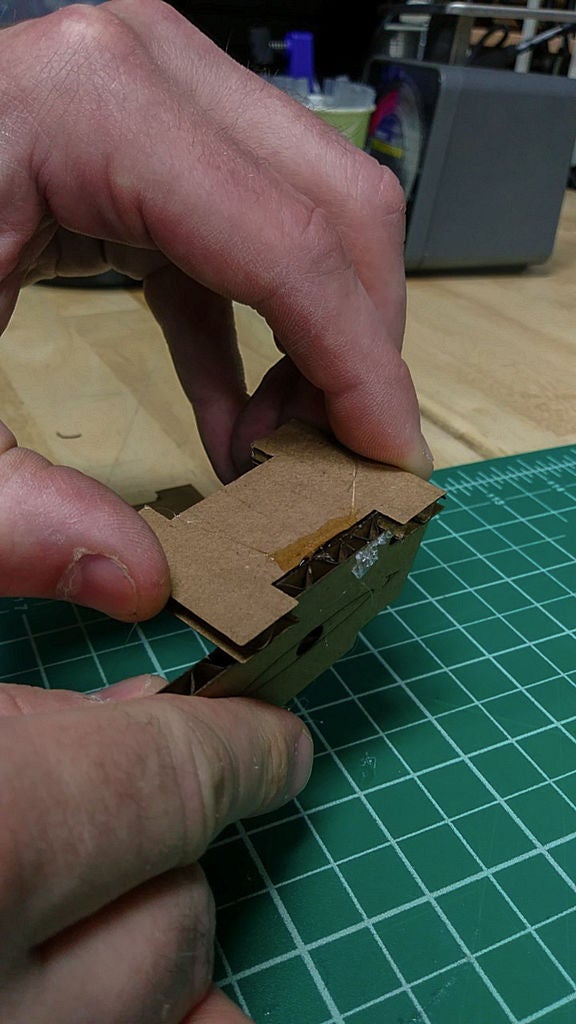
4。在I梁的凹痕旁边放一条胶水。
5。将I梁的凹痕放在腿部A的翼片下面。
6。对第二个I梁重复此操作。
7。在I梁的每个凹痕上放一条胶水。
8。放置另一个大腿部分,使其标签位于凹痕顶部,A面向另一条腿A部分的背面。当您将部件粘合在一起时,您将能够看到腿部时看到的As。
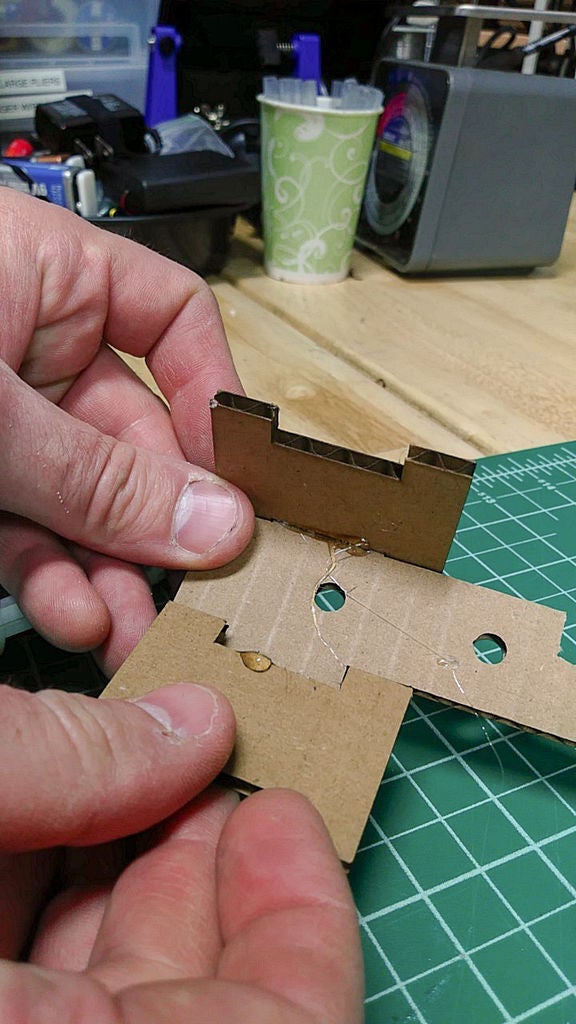
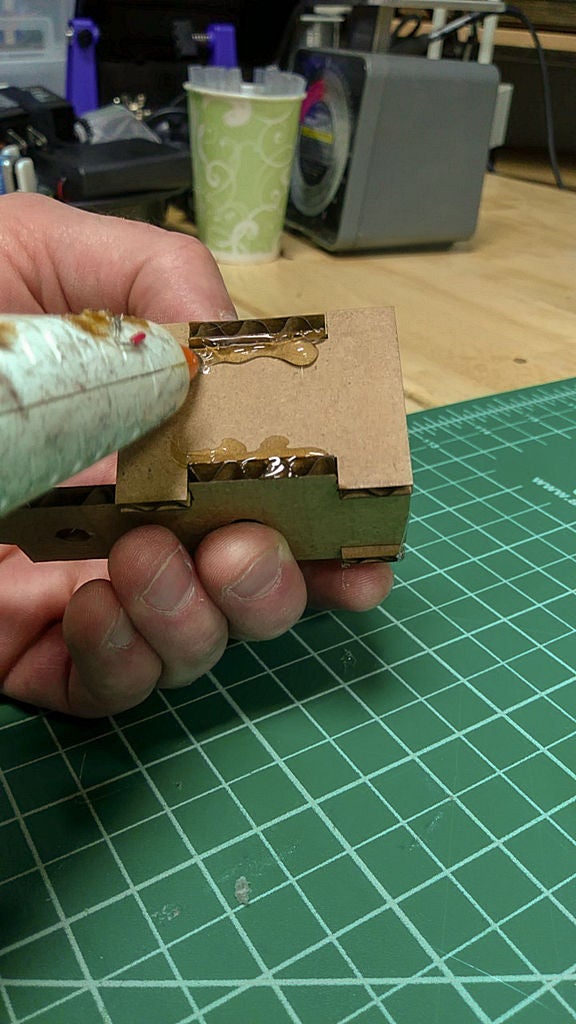
9。抓住两个小腿部分和两个大的I梁部分。
10。在一个大的I梁部分的凹痕中放置一行胶水。
11。将大I梁部分的凹痕放在下腿部分的舌片上。
12.对第二个大I梁部分重复步骤10和11。
13。在两个大的I梁部分的凹痕上放一条胶水。
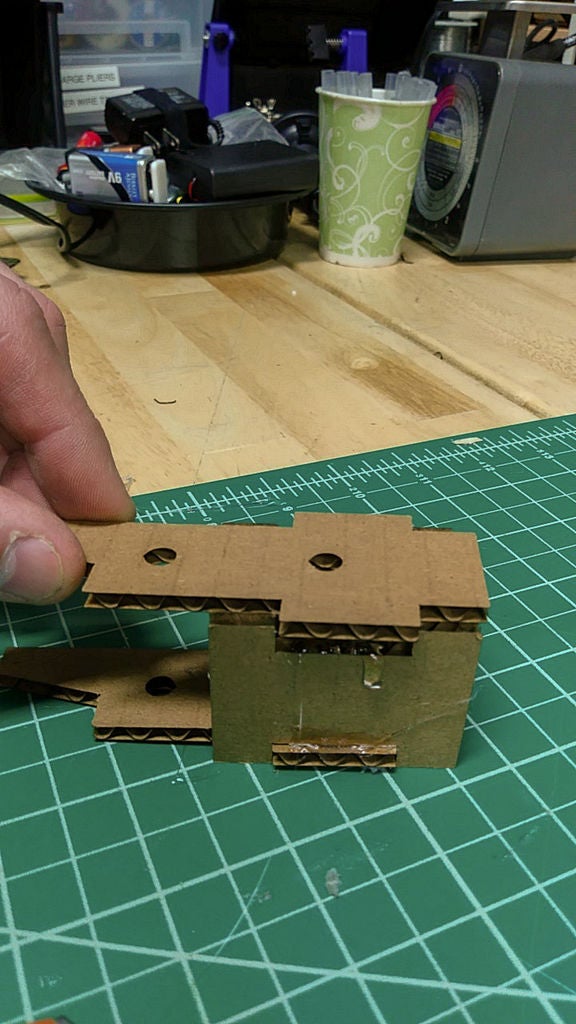
14。放置第二个小腿部分,使其突出部分位于两个大I梁的凹槽中。
15。对剩余的腿部B,C和D重复步骤1到15.
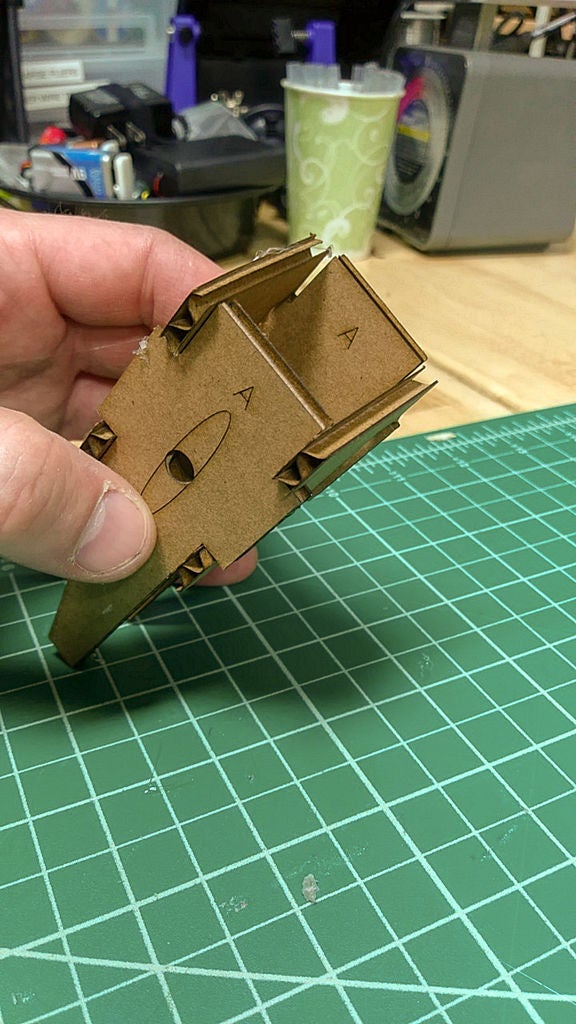
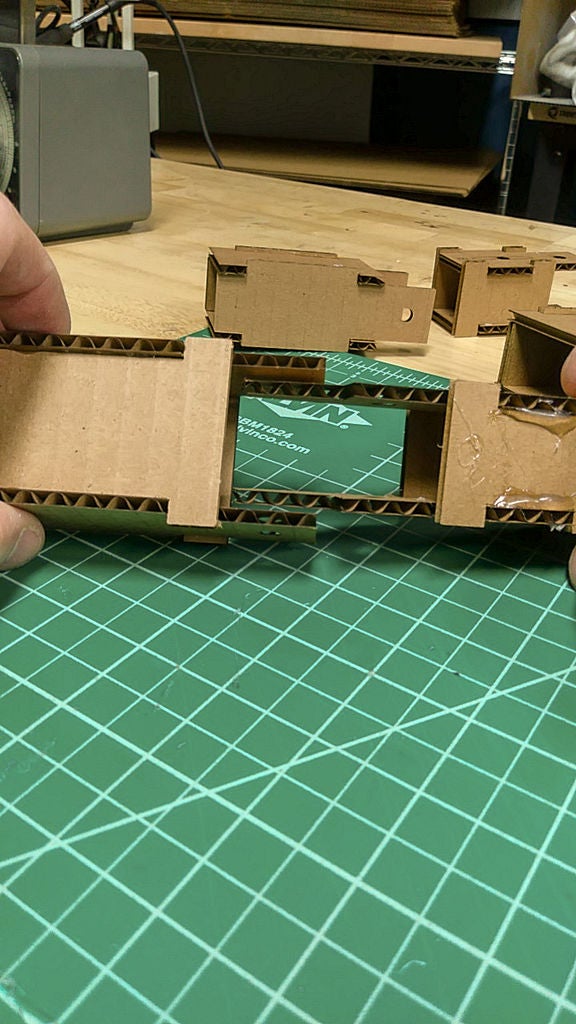
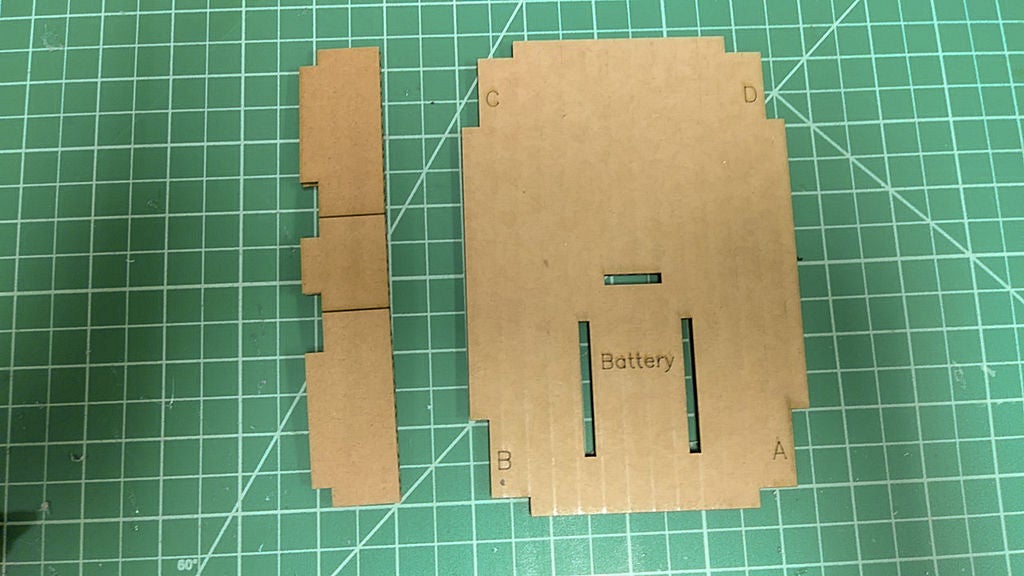
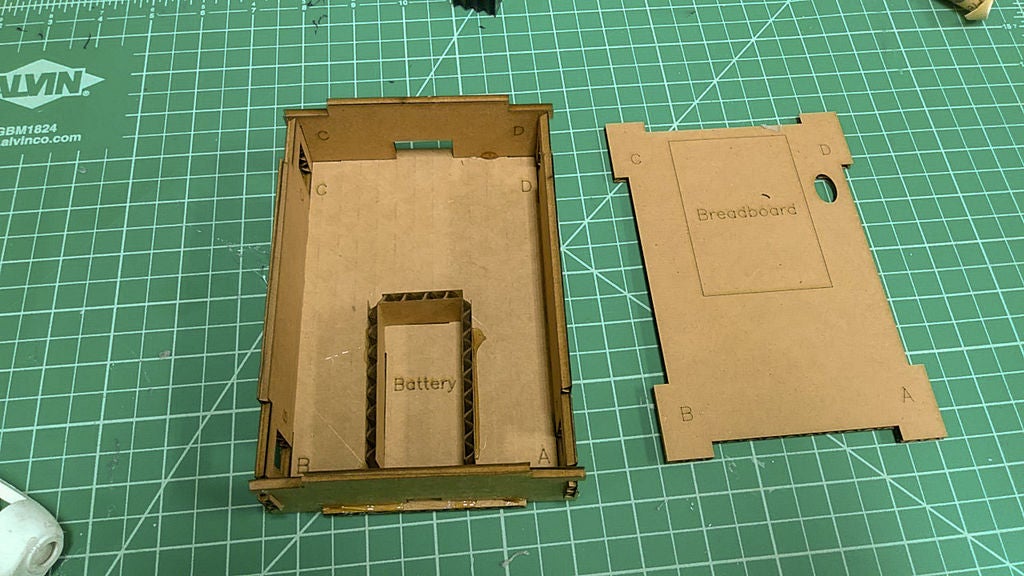
步骤3:组装身体
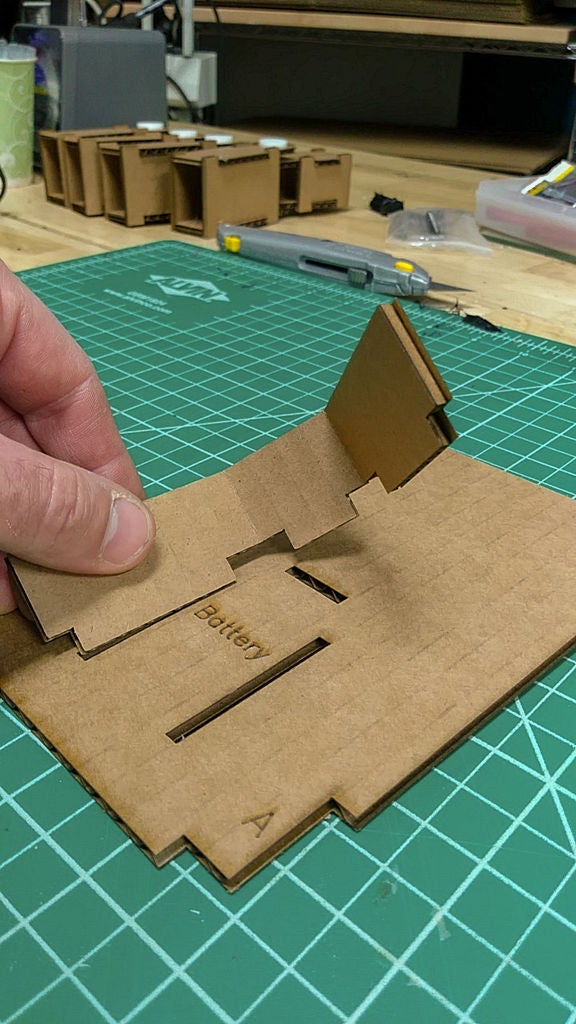
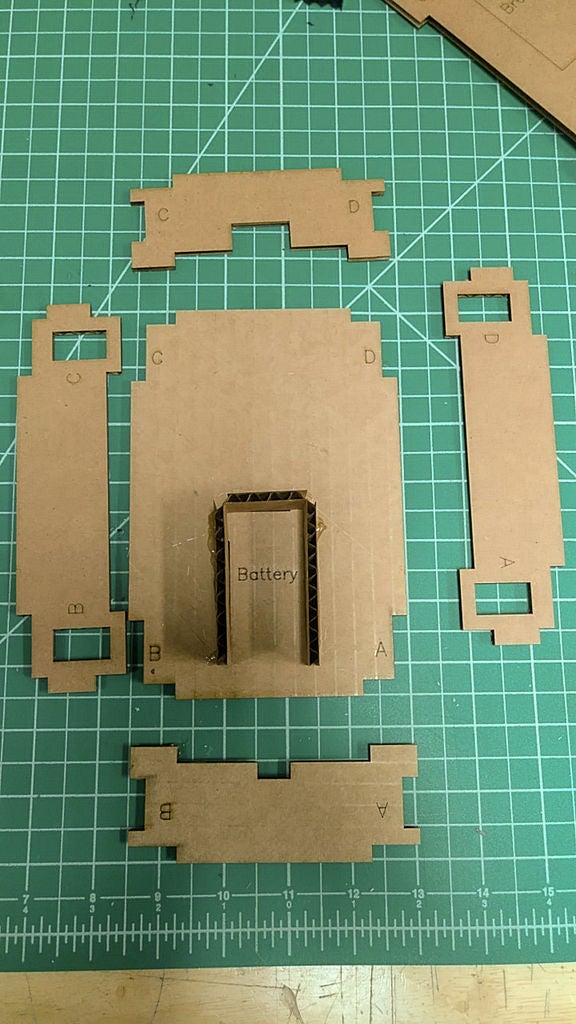





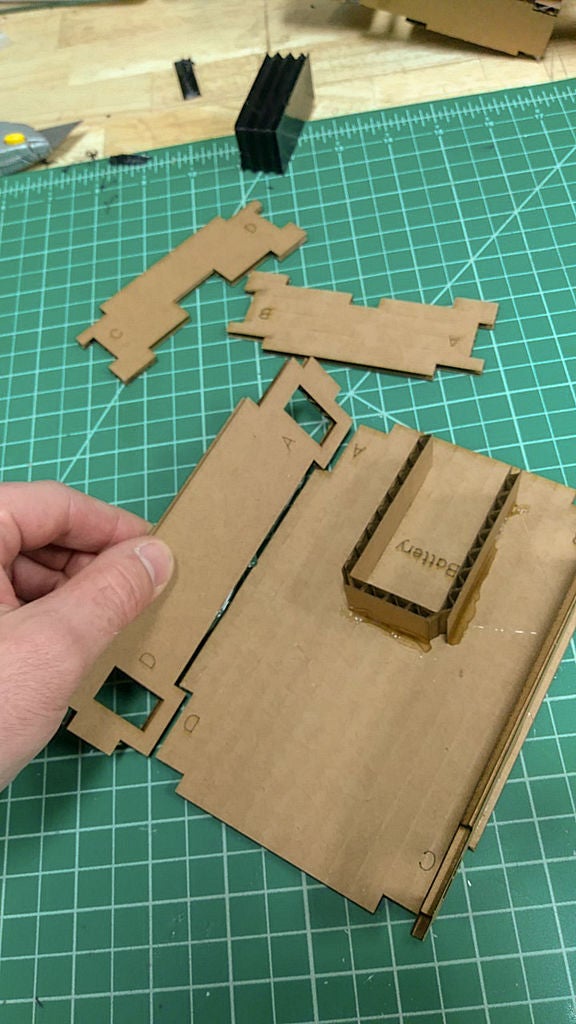
我们将组装车身并将伺服电机粘合到位。
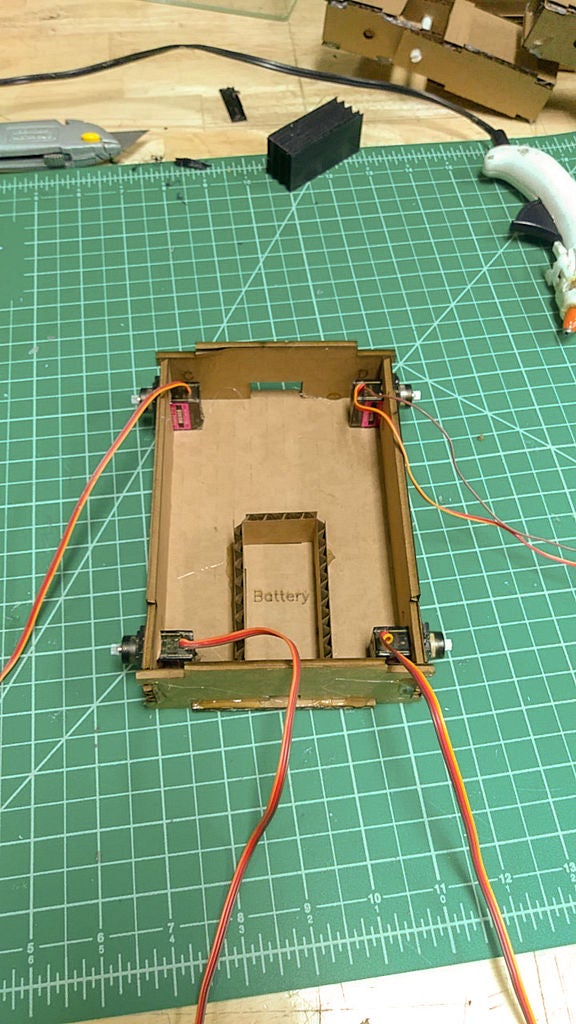
1。收集车身和4个伺服电机的零件。
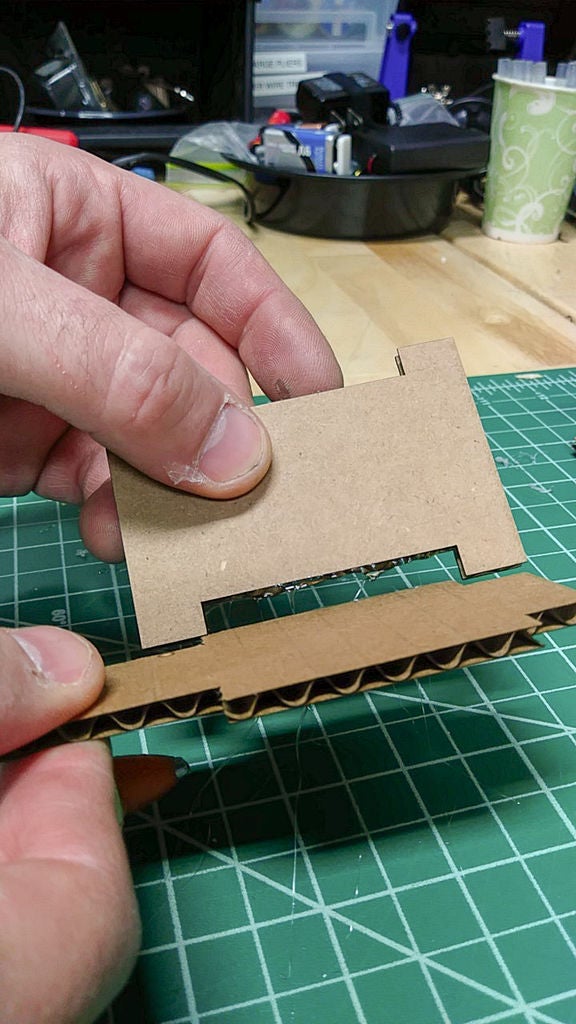
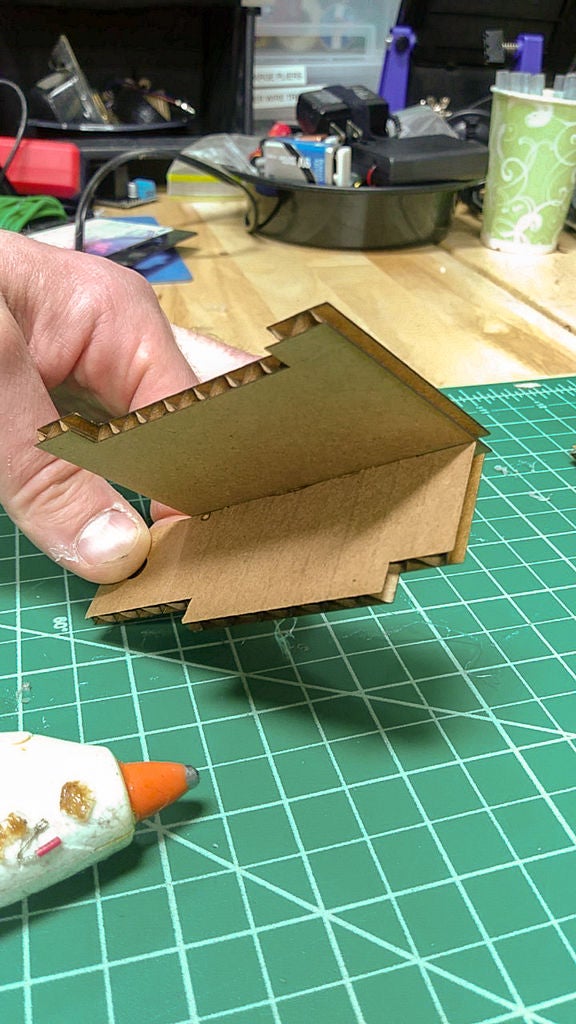
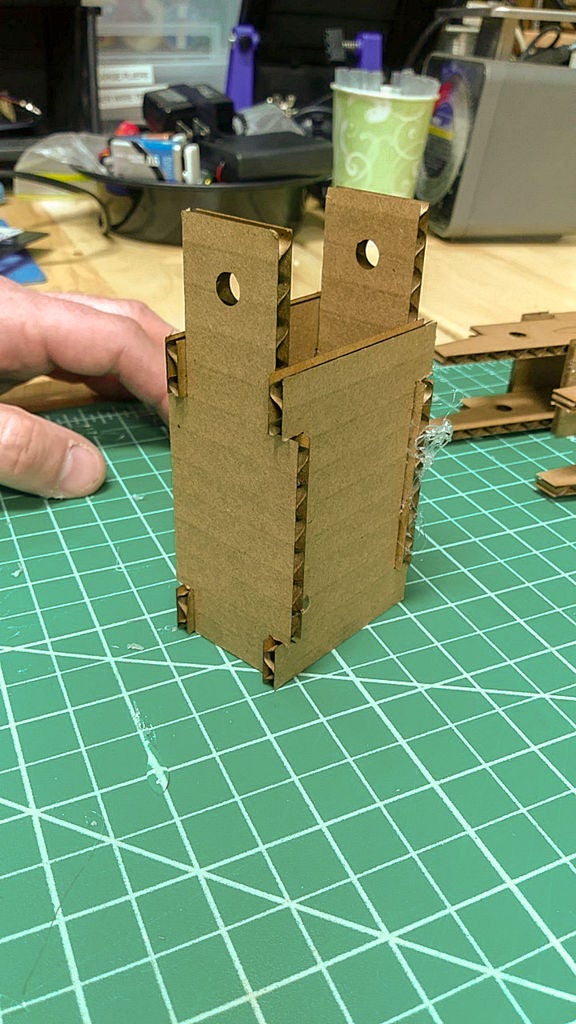
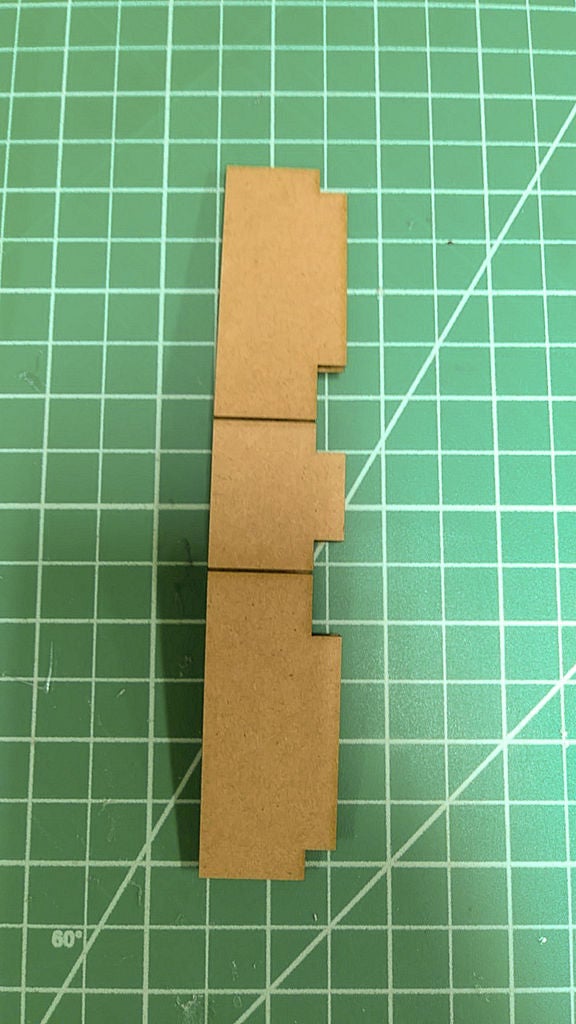
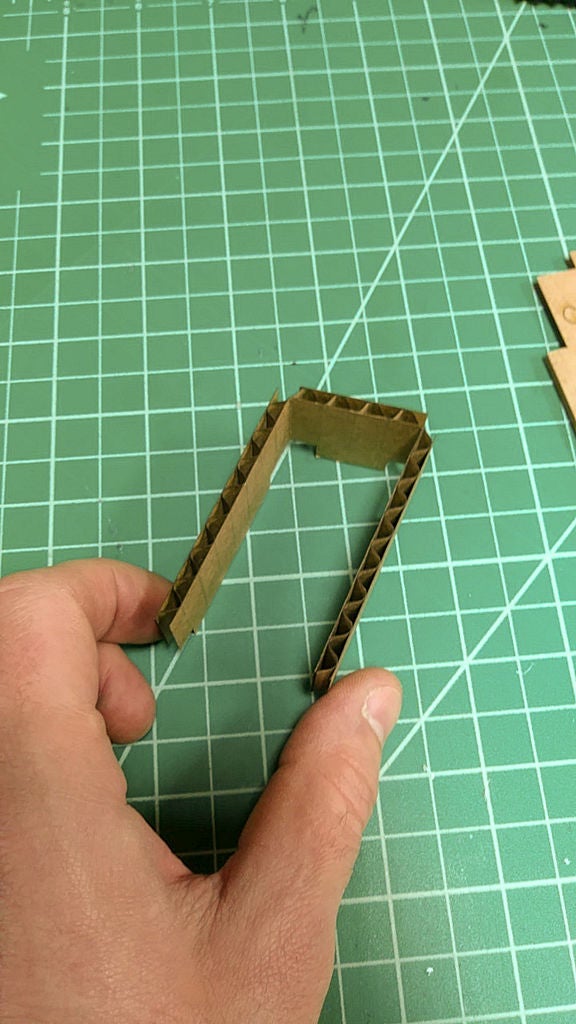
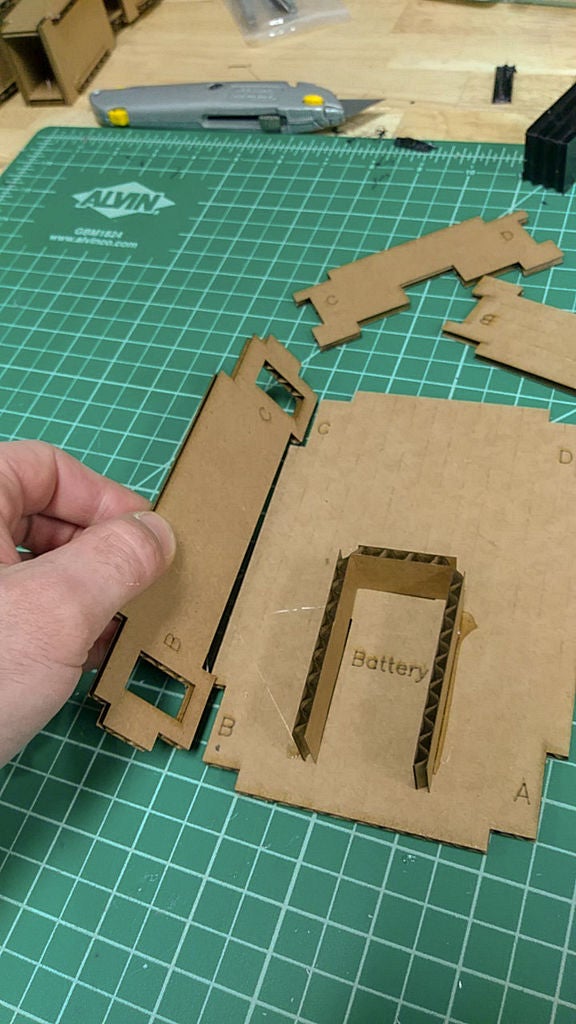
2。抓住电池盒壁部分并沿刻痕线折叠。
3。将电池盒壁的卡舌放入主体底座部分的插槽中。如果您在使标签移动到位时遇到一些问题,请用拇指和指针轻轻按下标签,使标签形成楔形。这有助于将电池壁安装到位。
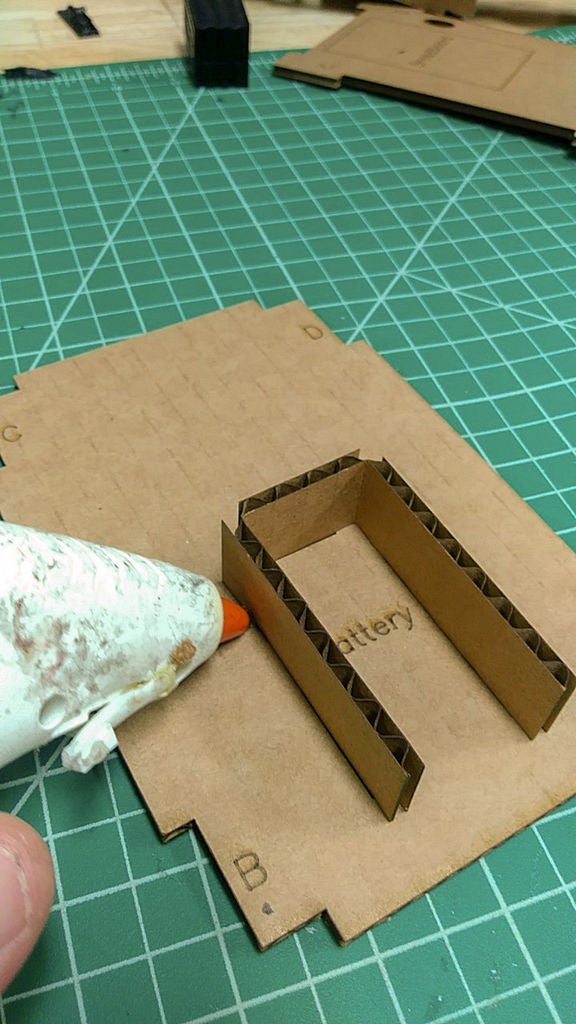
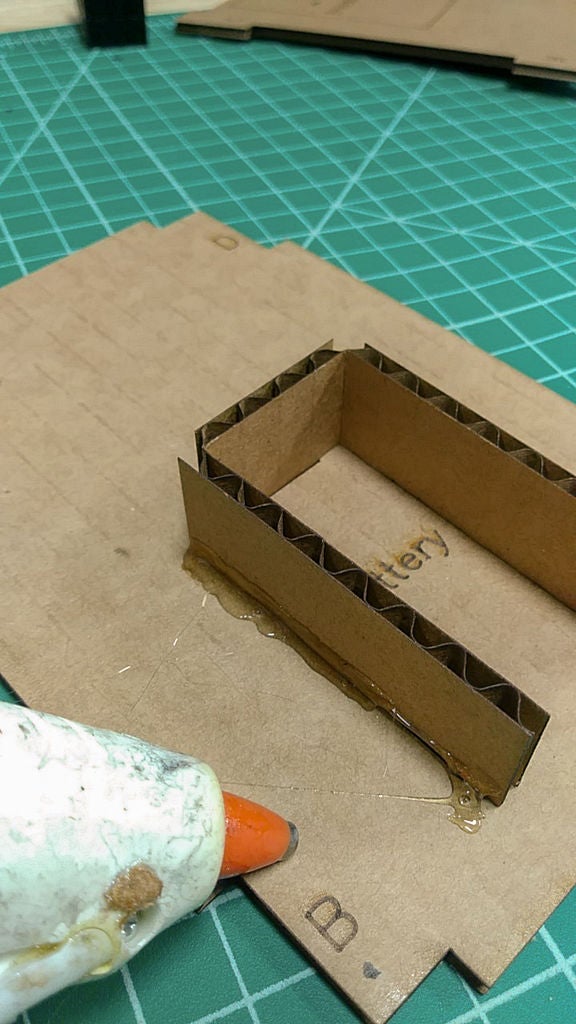
4。沿墙壁底部放置一排胶水,将电池墙固定到位。
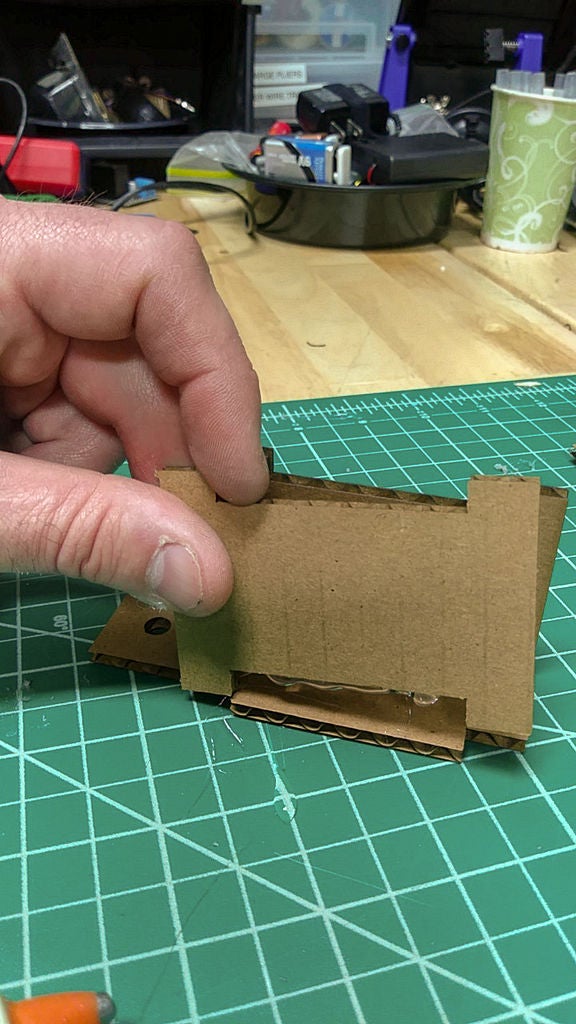
5。用B和C标签抓住侧壁,沿其凹痕放置一排胶水。
6。将此侧壁的凹口放在底座的凸耳上。侧壁的B和C应与基部的B和C对齐。
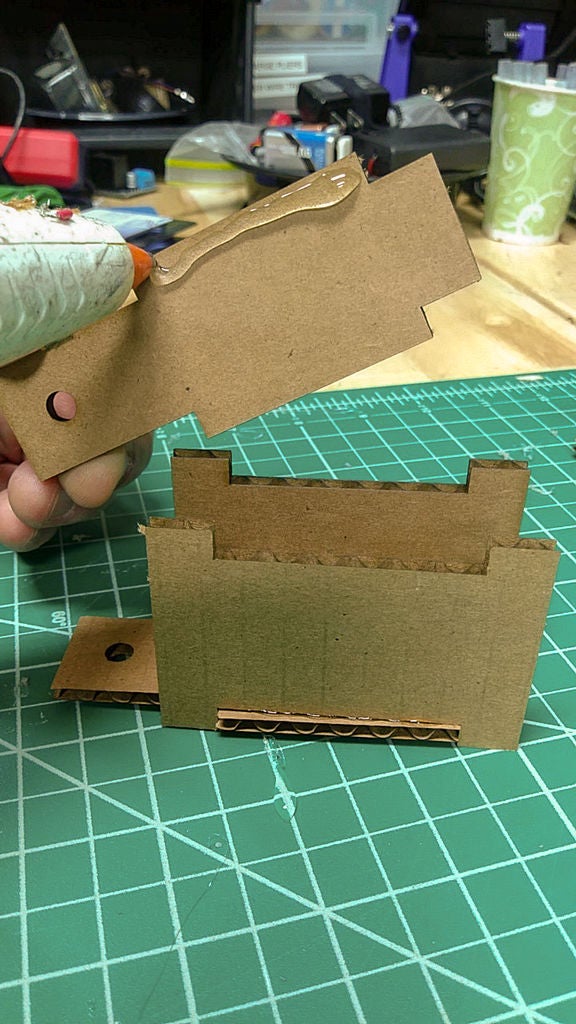
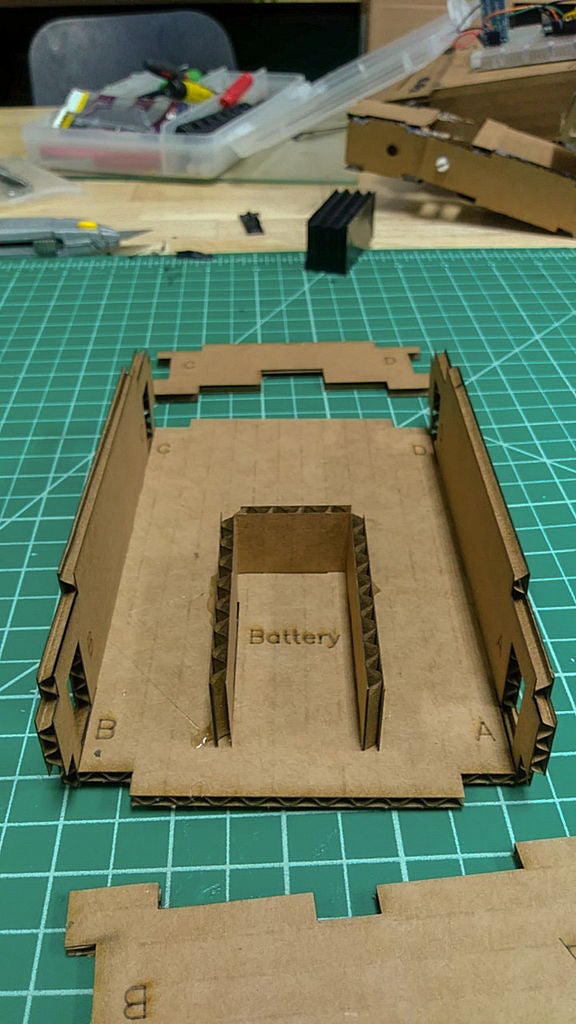
7.用A和D标签抓住侧壁,沿其凹痕放置一排胶水。
8。将此侧壁的凹口放在底座的凸耳上。侧壁的A和D应与基部的A和D对齐。
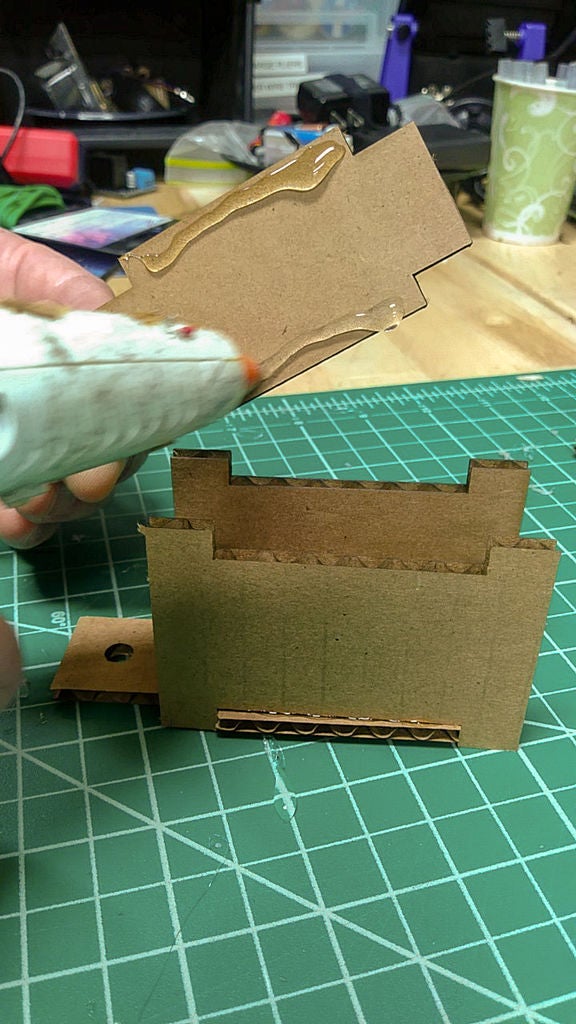
9。用B和D标签抓住侧壁,沿其凹痕放置一排胶水。
10。将此侧壁的凹口放在底座的凸耳上。侧壁的B和D应与基部的B和D对齐。
11。用A和C标签抓住侧壁,沿其凹痕放置一排胶水。
12。将此侧壁的凹口放在底座的凸耳上。侧壁的A和C应与基部的B和D对齐。
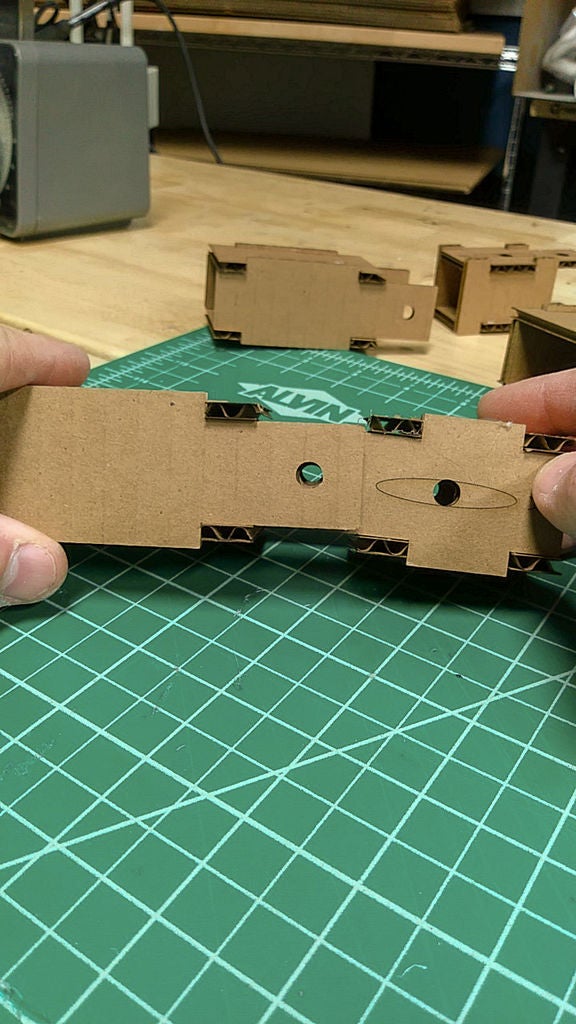
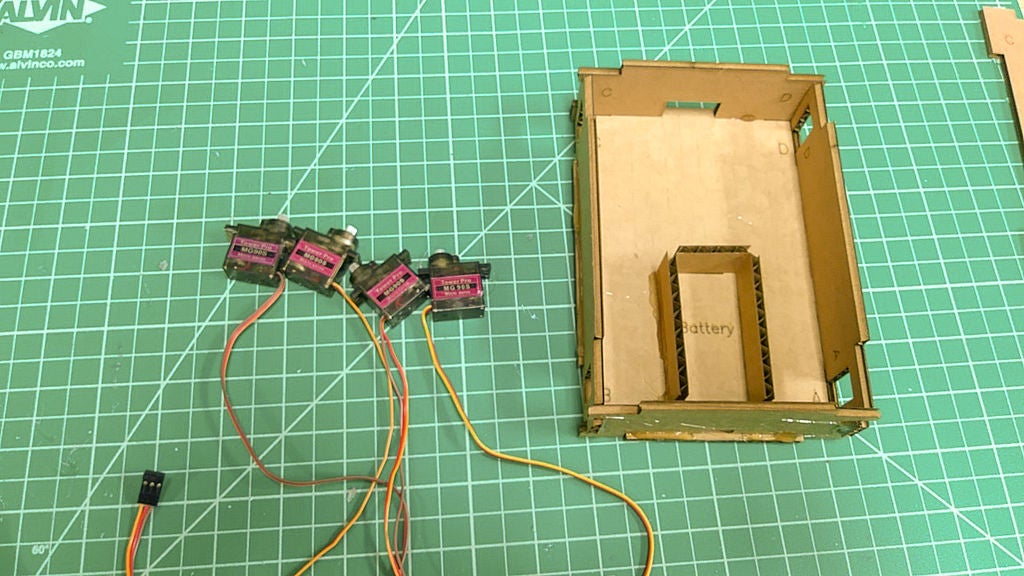
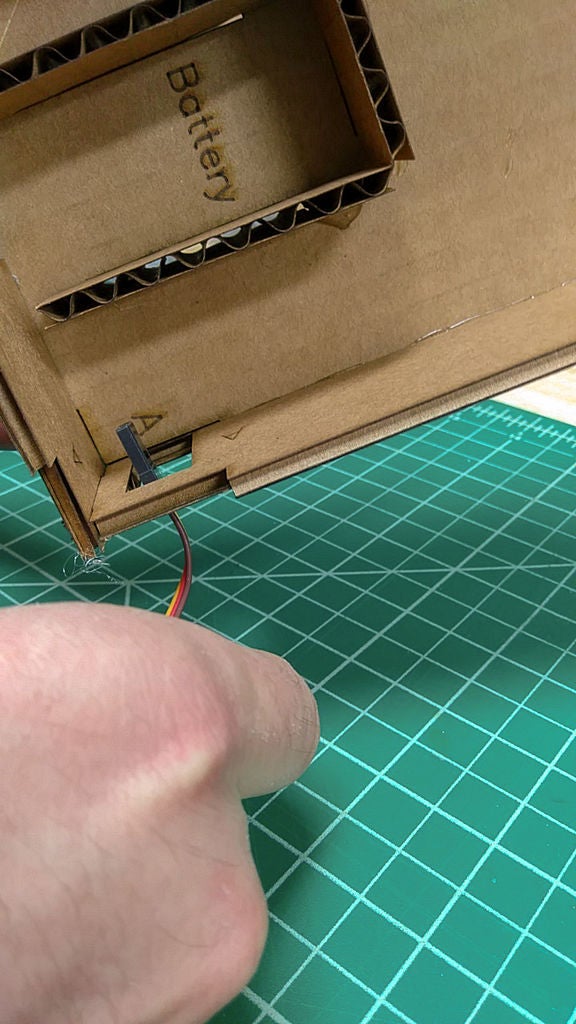
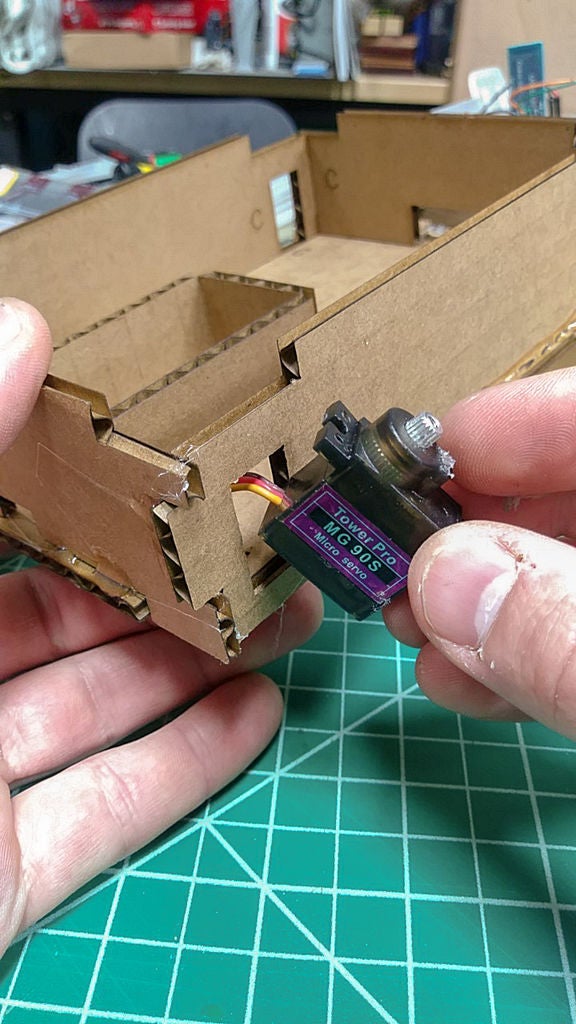
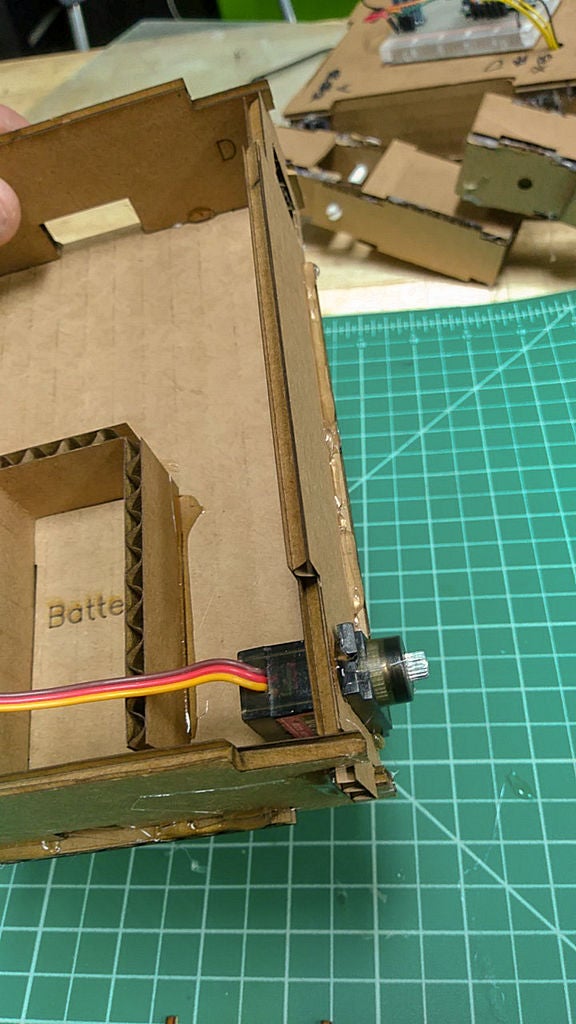
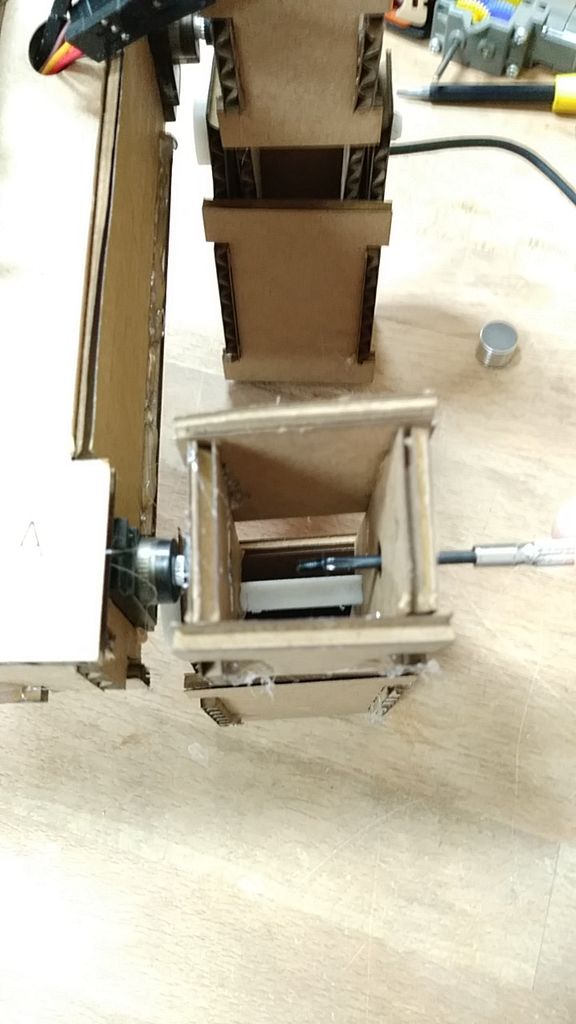
13。抓住其中一个伺服电机。
14。将伺服电线穿过侧壁标记为A的孔。
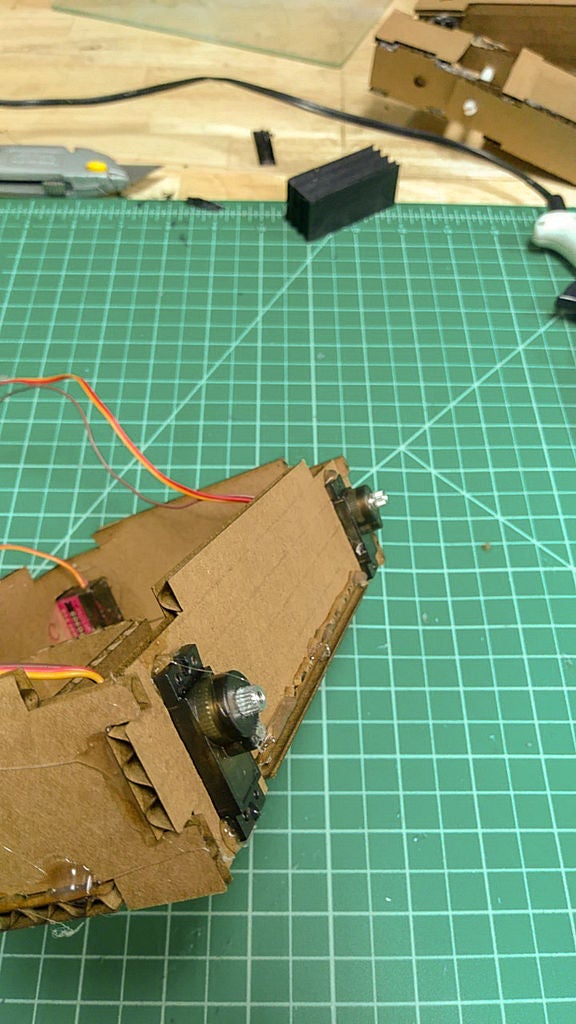
15。这一部分至关重要,请按照图片进行参考。对齐伺服电机,使其侧面及其导线朝上。
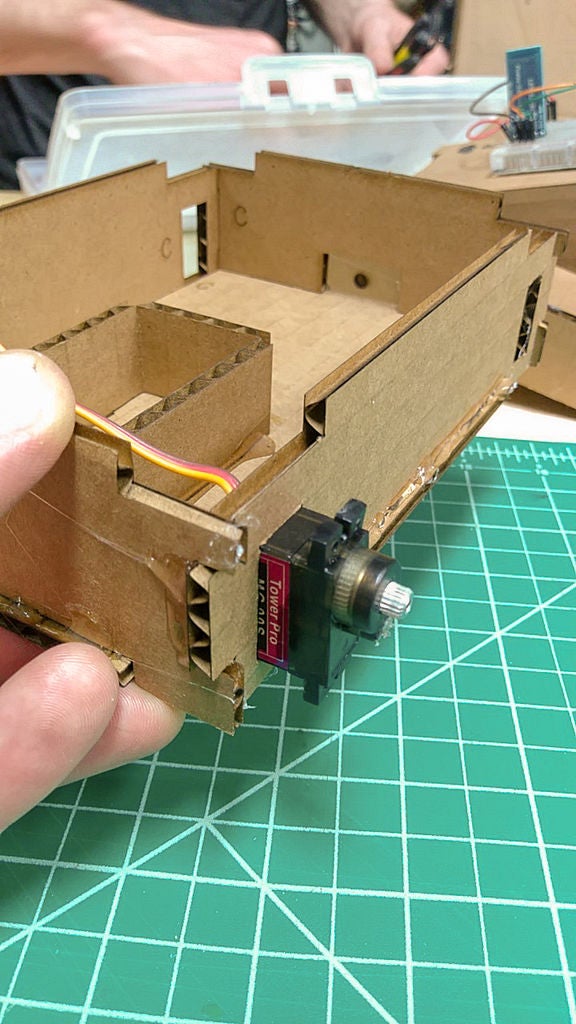
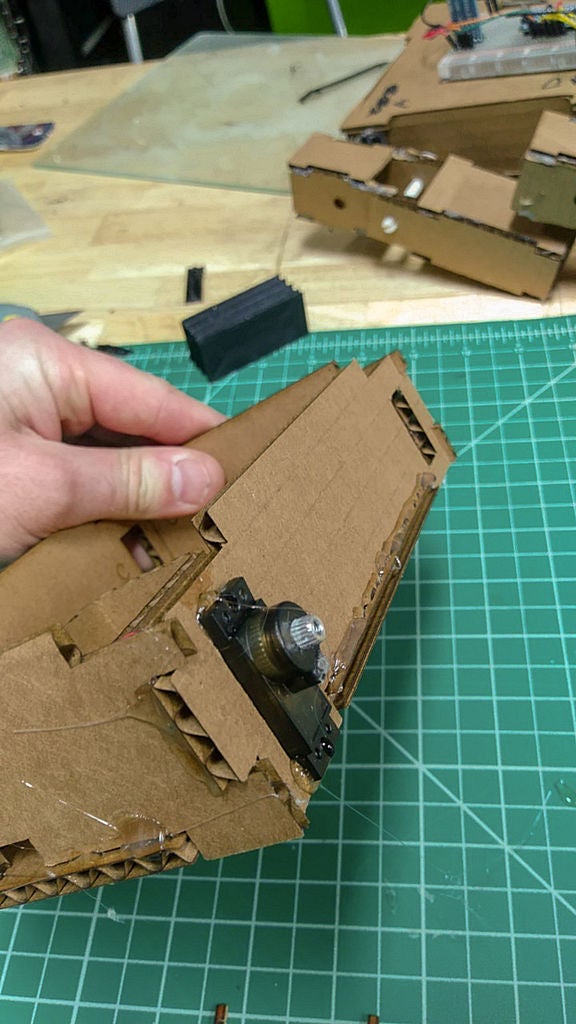
16。将一小滴胶水放在侧壁上,位于伺服电机两个卡舌的下方。
17。将伺服电机按入侧壁,将其固定到位。
18。重复步骤14到17.
伺服电机的方向很重要,因为代码假定伺服电机的方向是导线朝上。如果您碰巧将它们粘贴在相反方向,则可以调整代码以使此方向起作用。
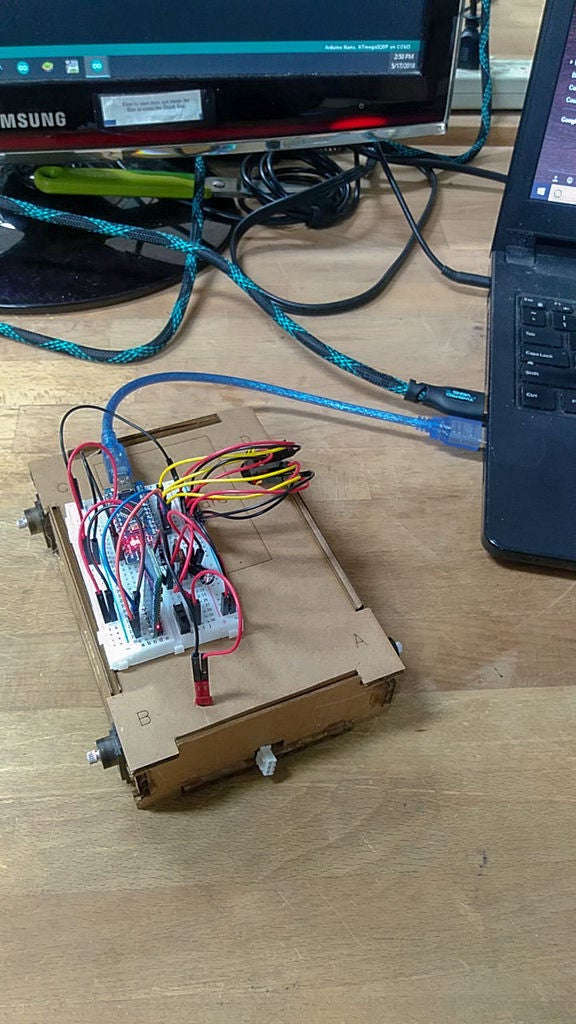
步骤4:组装面包板
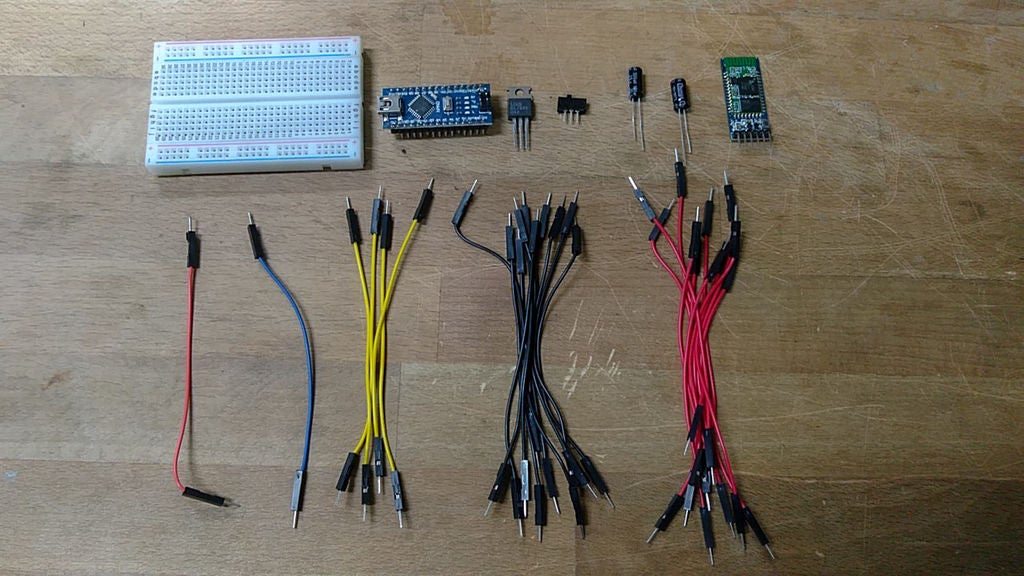
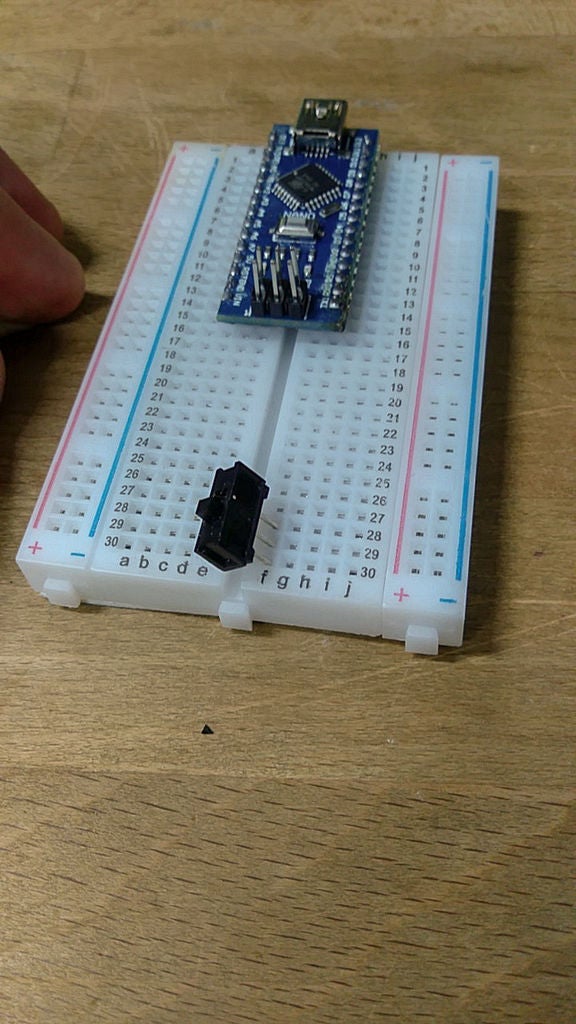

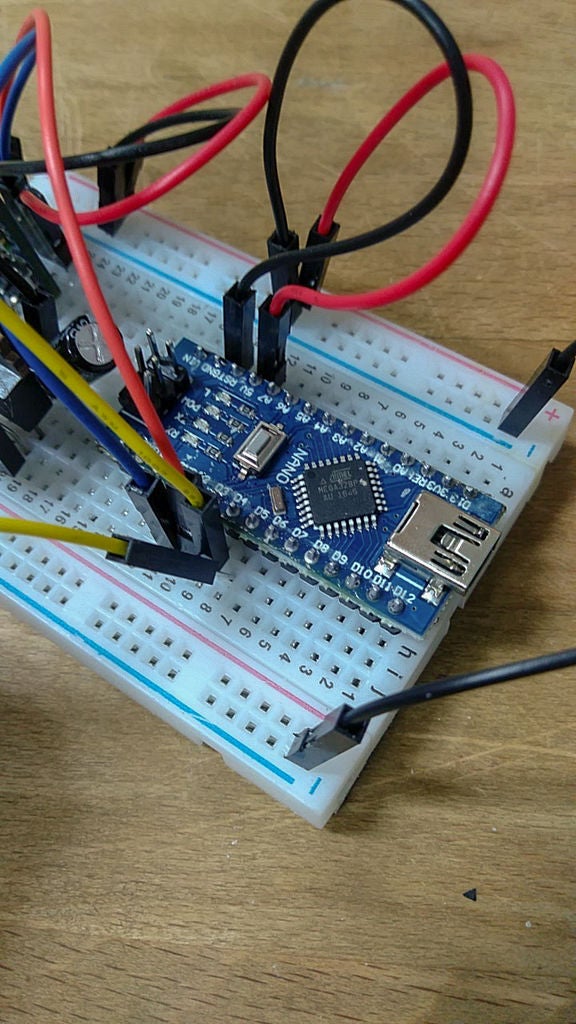
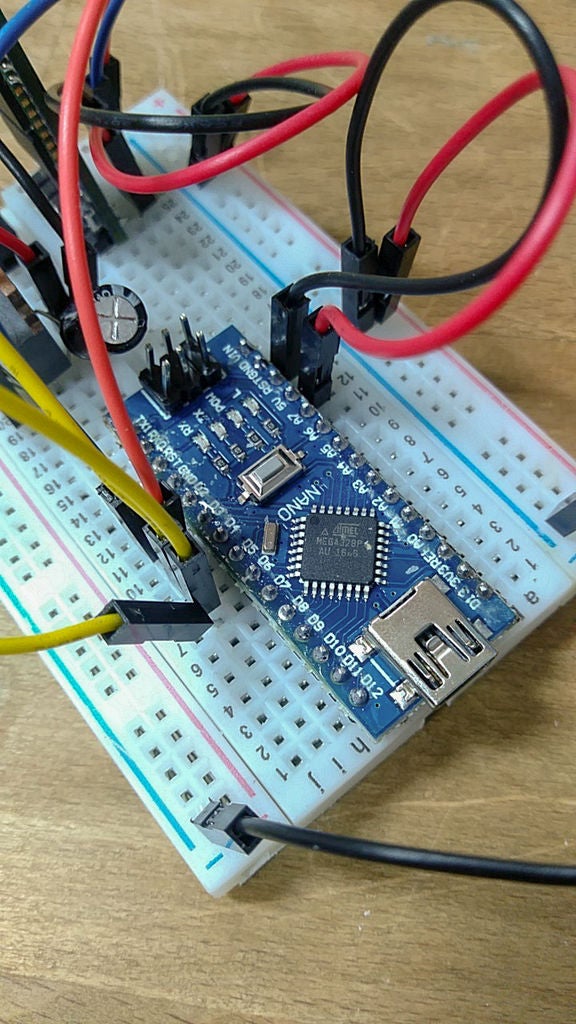
将腿和身体放在一边。我们打算在面包板上组装电子产品。
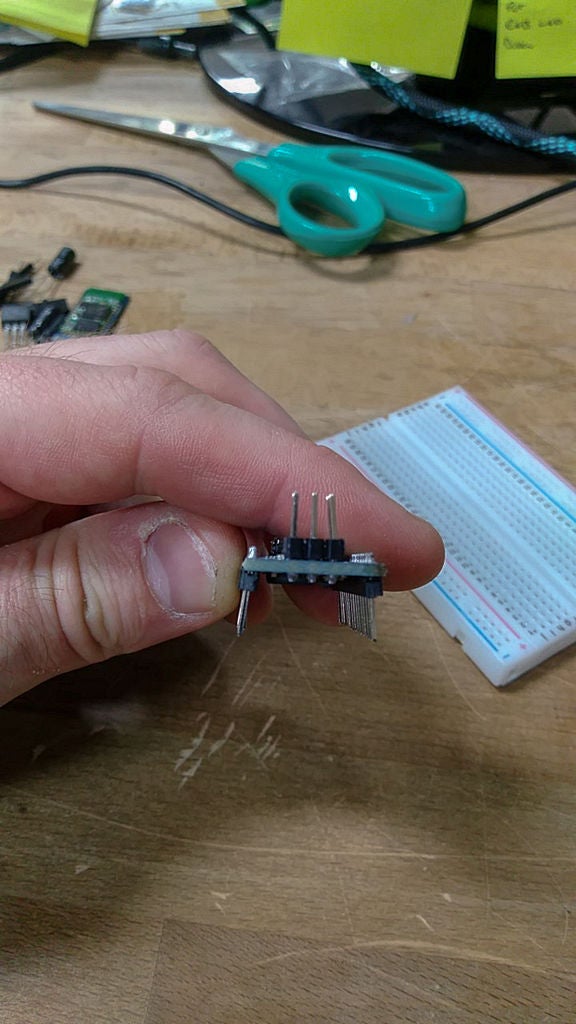
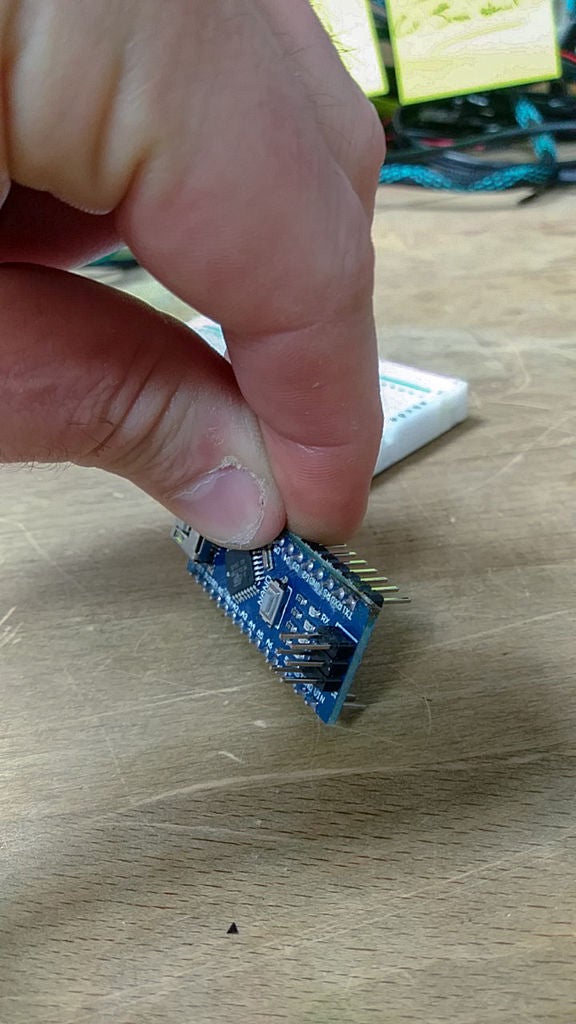
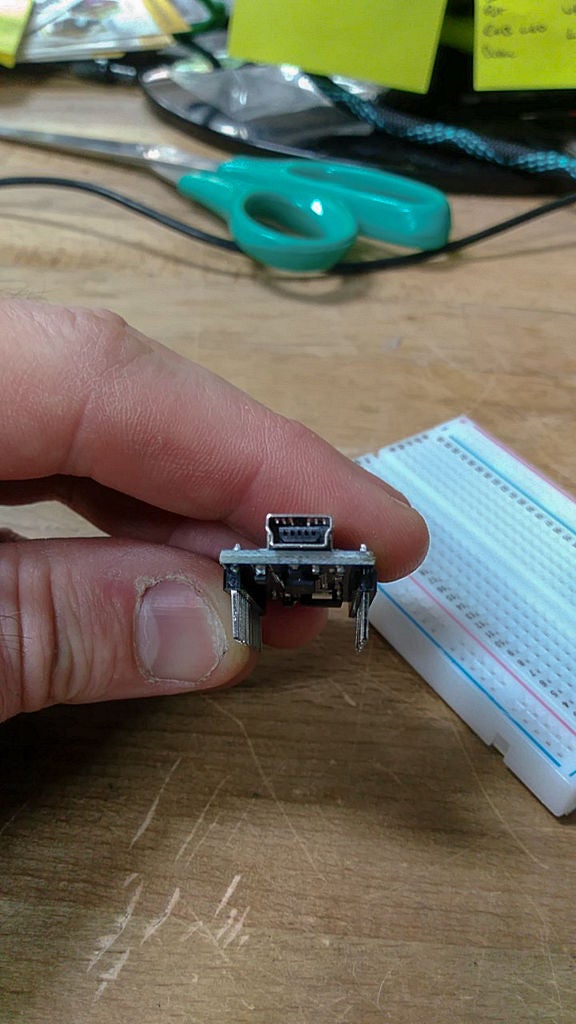
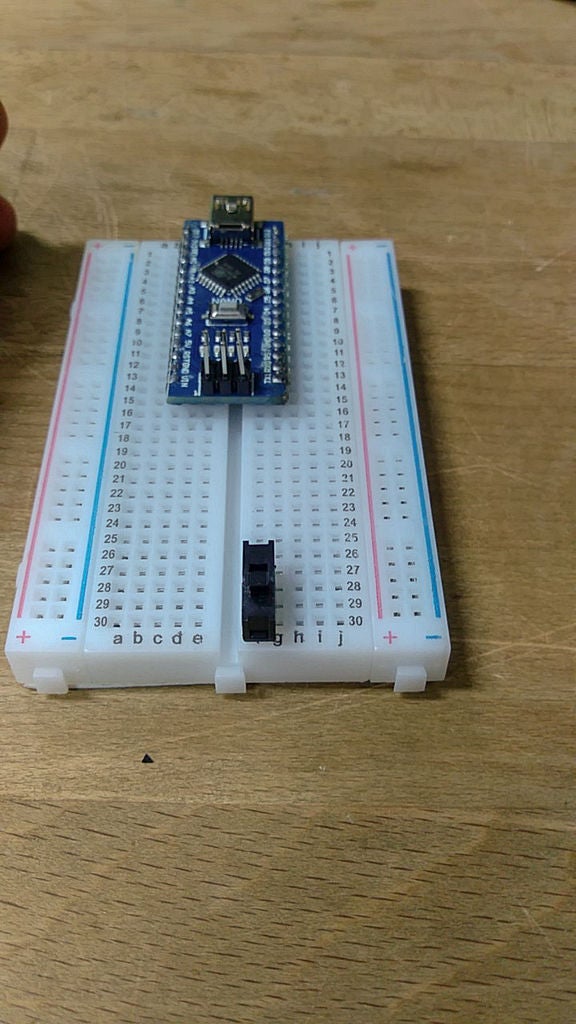
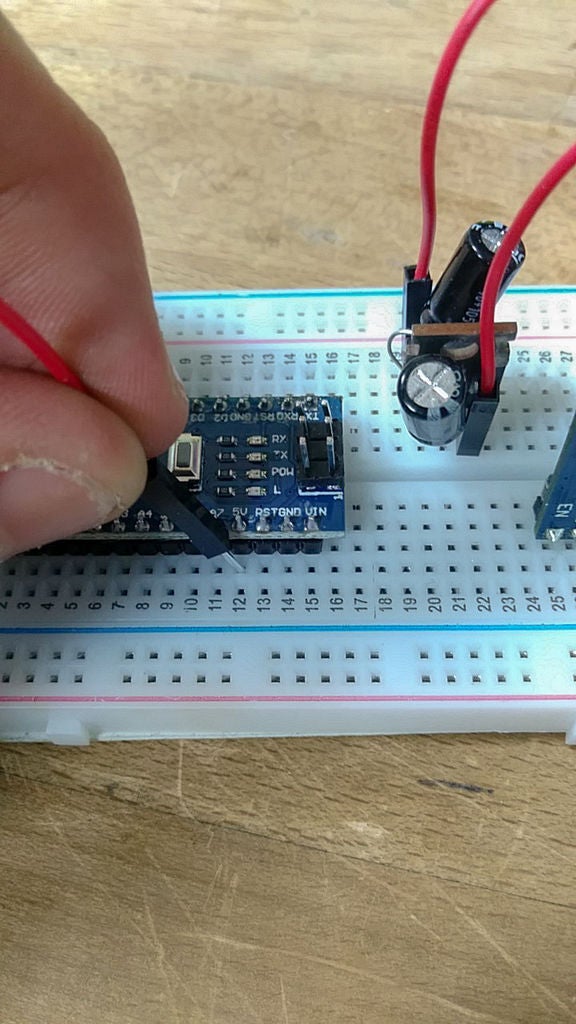
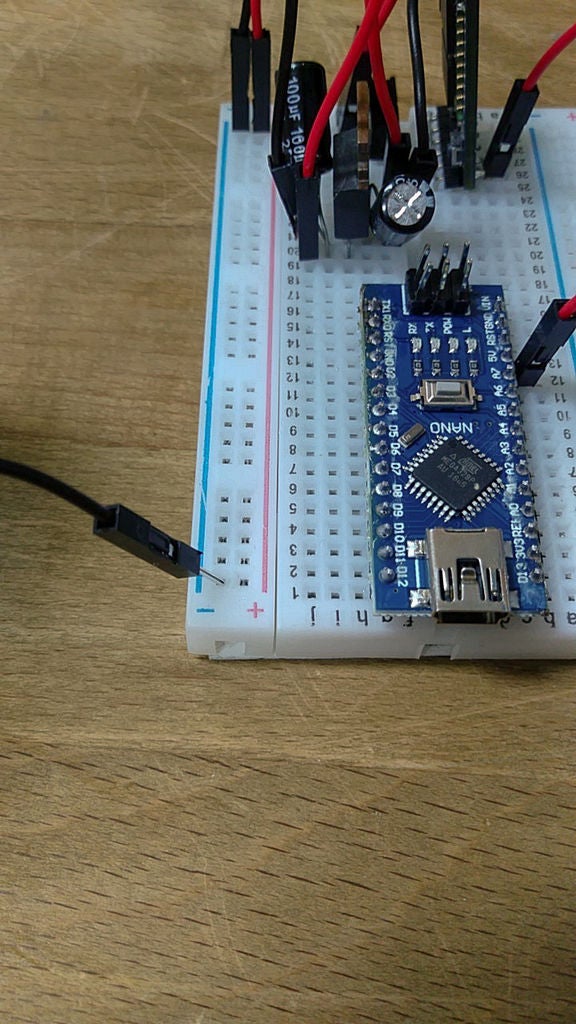
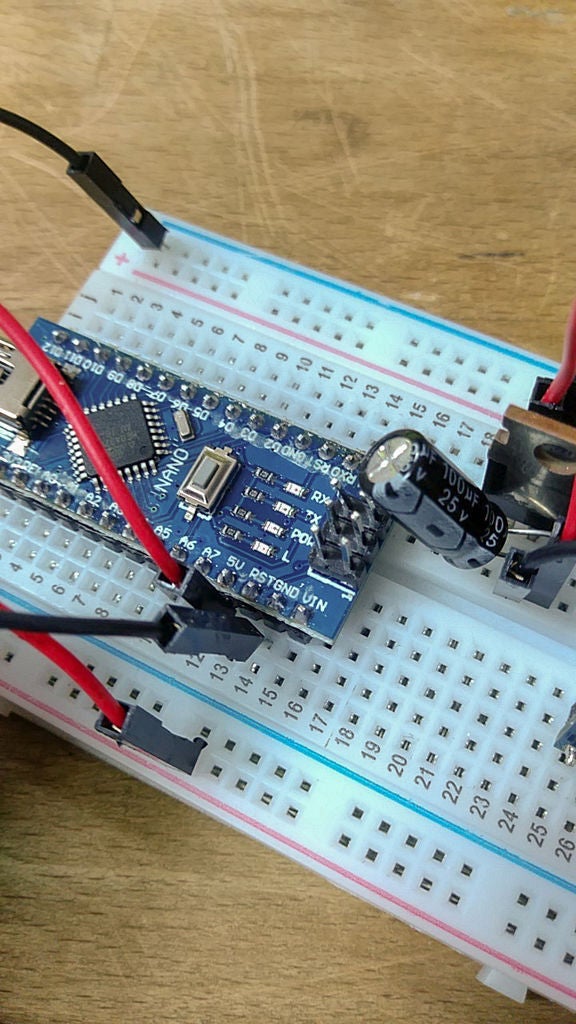
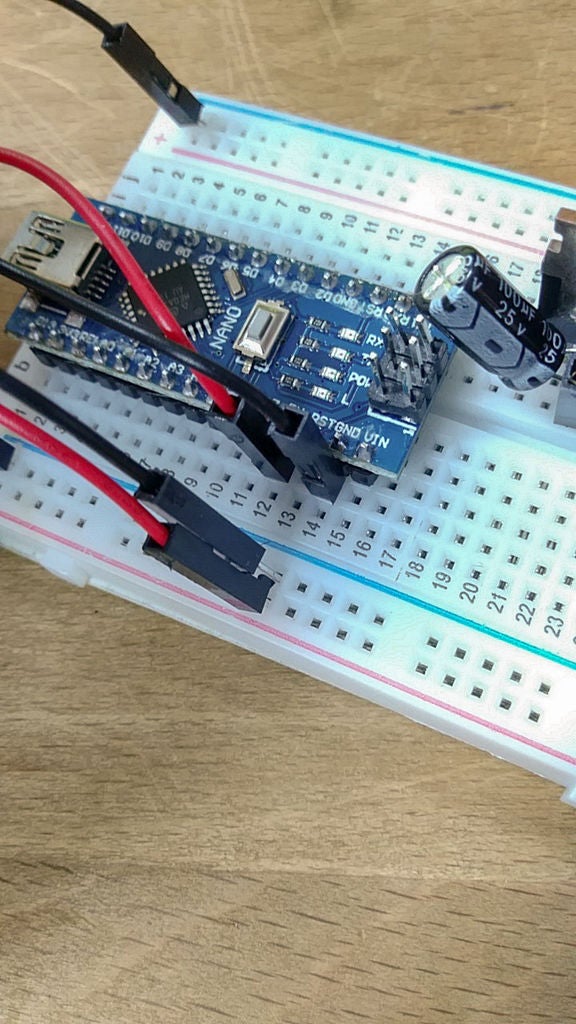
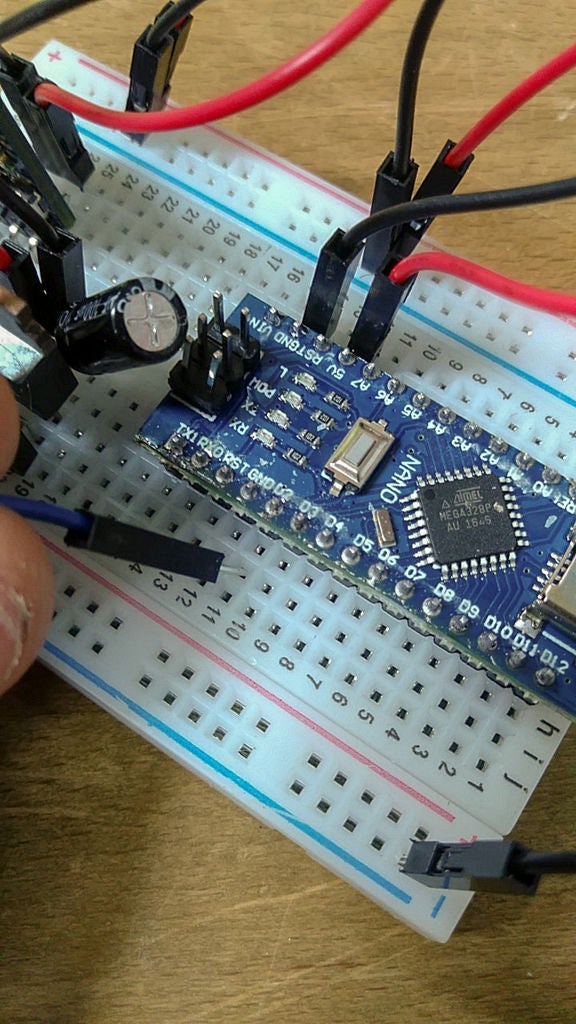
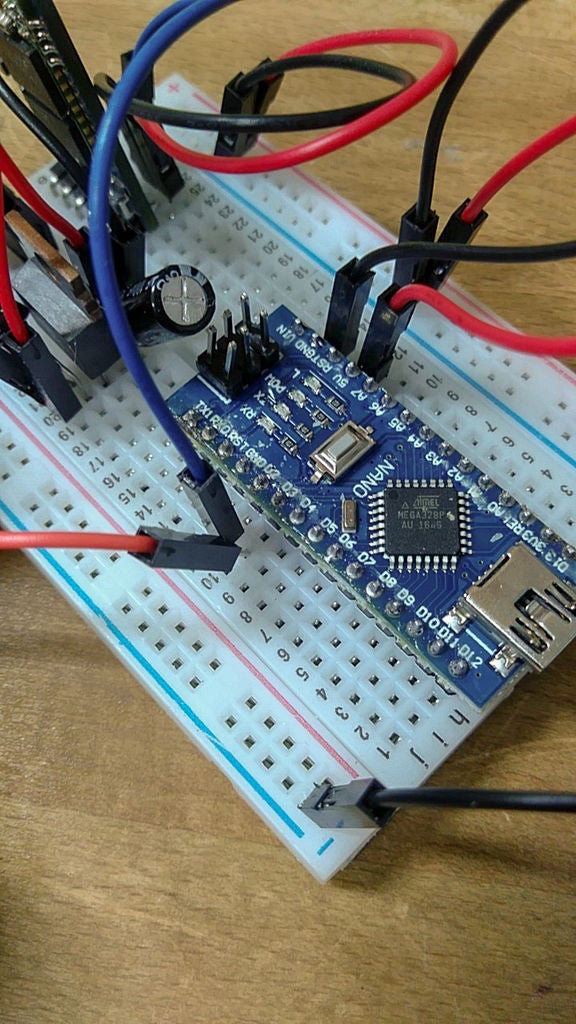
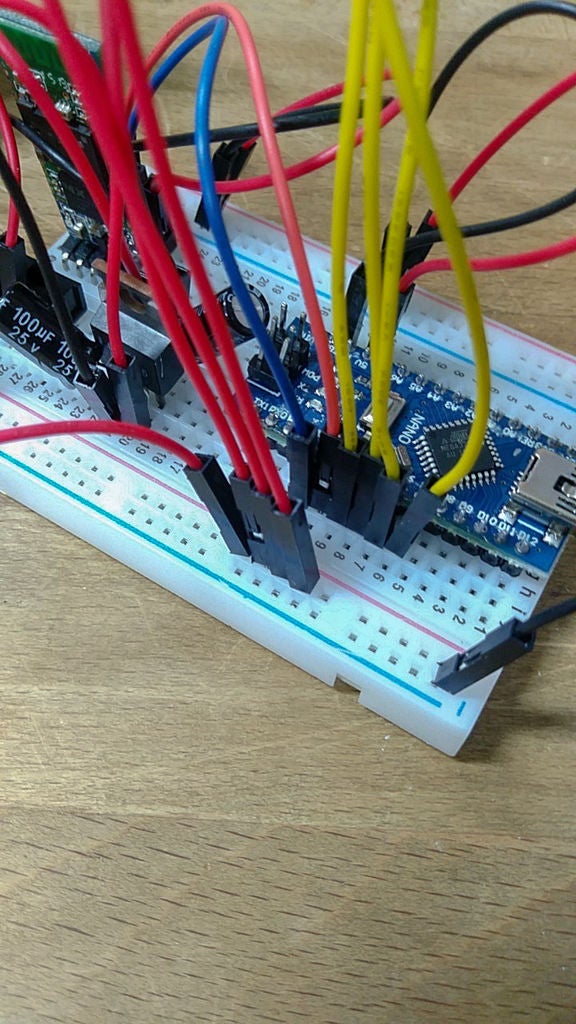
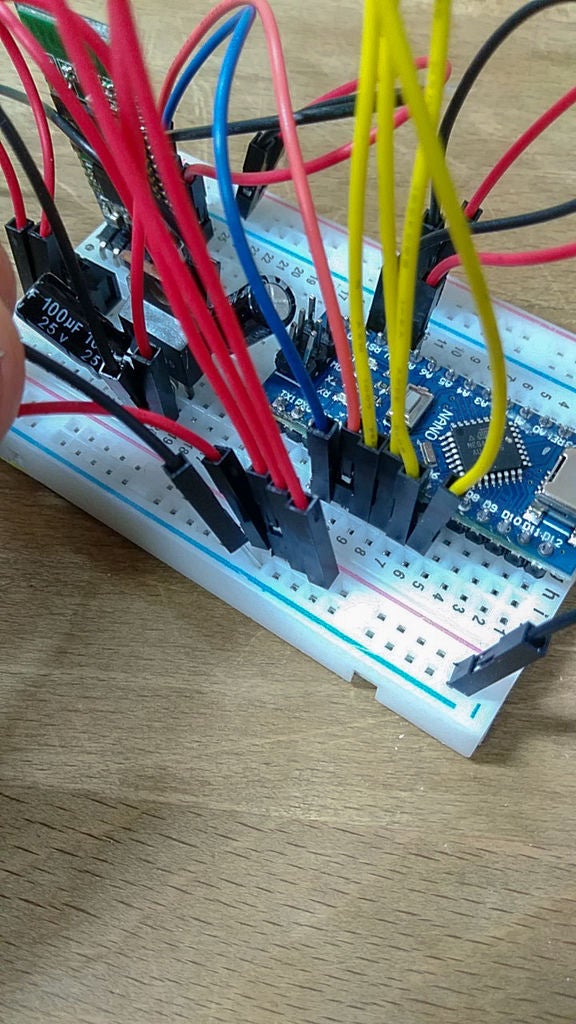
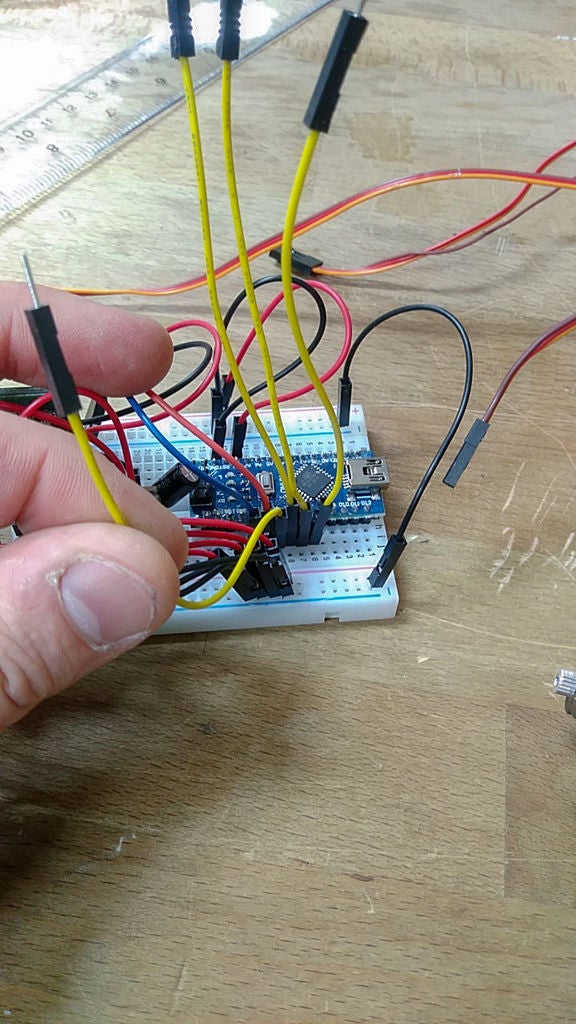
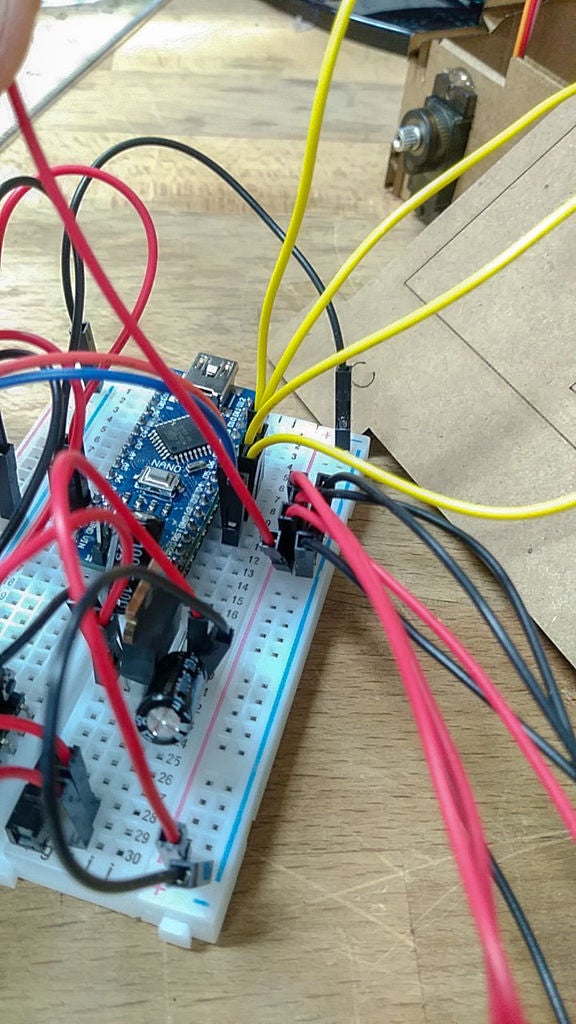
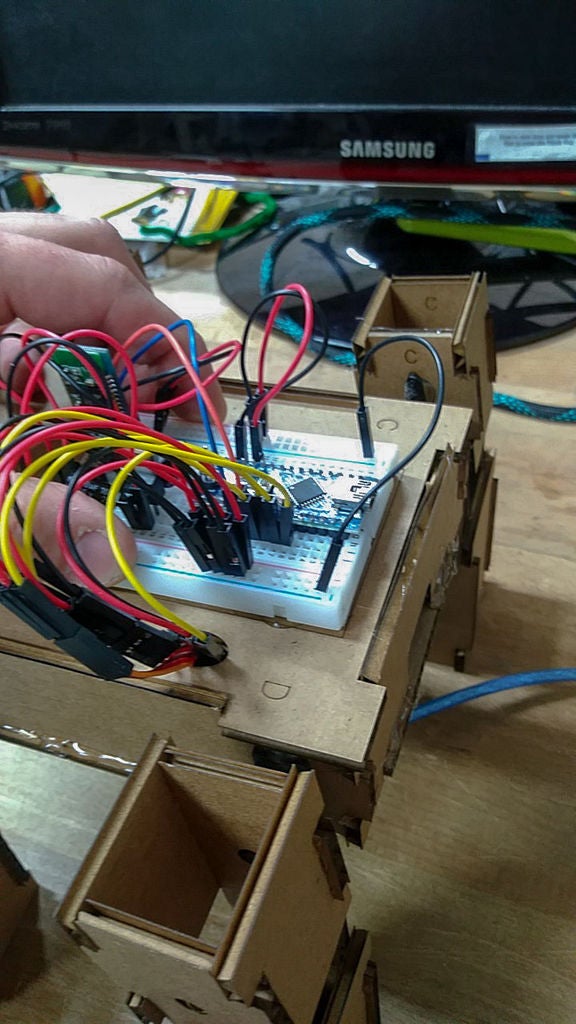
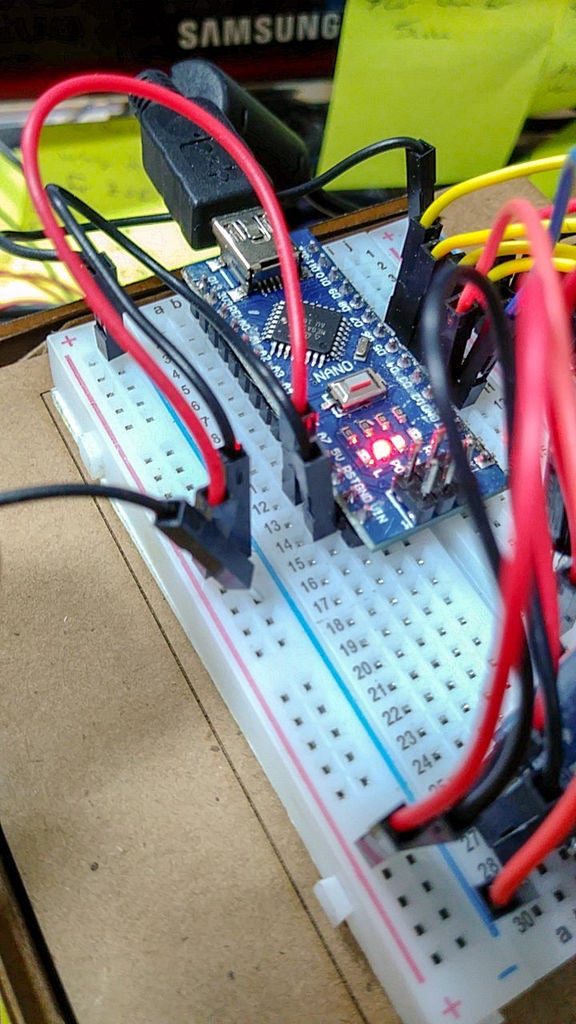
快速提示。如果您在将Nano纳入面包板时遇到一些麻烦,请查看针脚。在第二张照片中,您可以看到针脚呈一定角度。 Nanos通常都是这样的。你支付廉价Arduinos的价格。
一个简单的解决方法是将Nano的针脚放在像桌面这样的坚硬表面上,然后轻轻地将Nano压入桌面。这将立刻拉直所有引脚。为对方做这件事。
请轻轻按压!你不想打破电路板上的引脚。
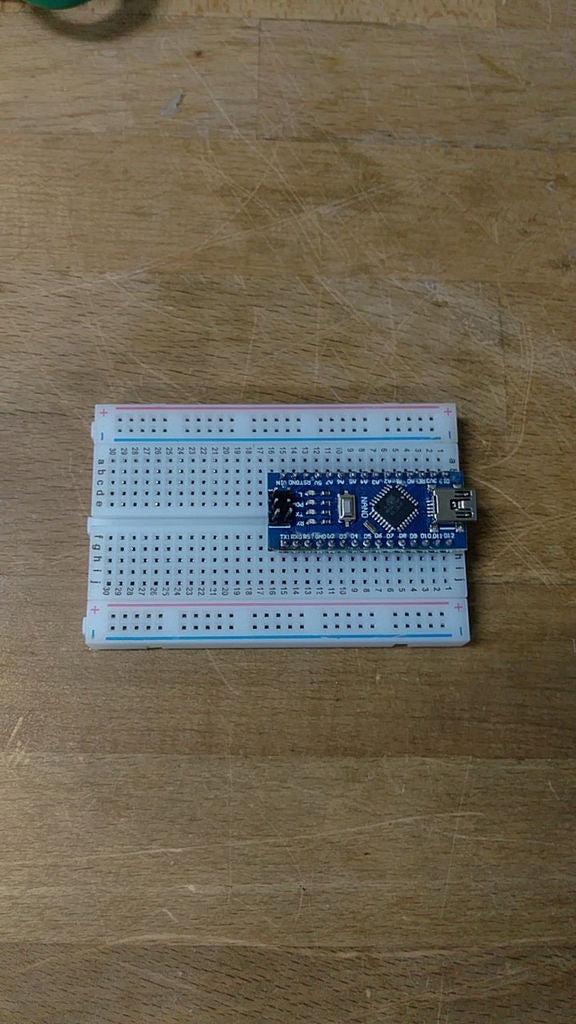
有关这些说明,请参阅面包板上的标签。它们像网格一样设置。列标记为A到J,数字从1到30.
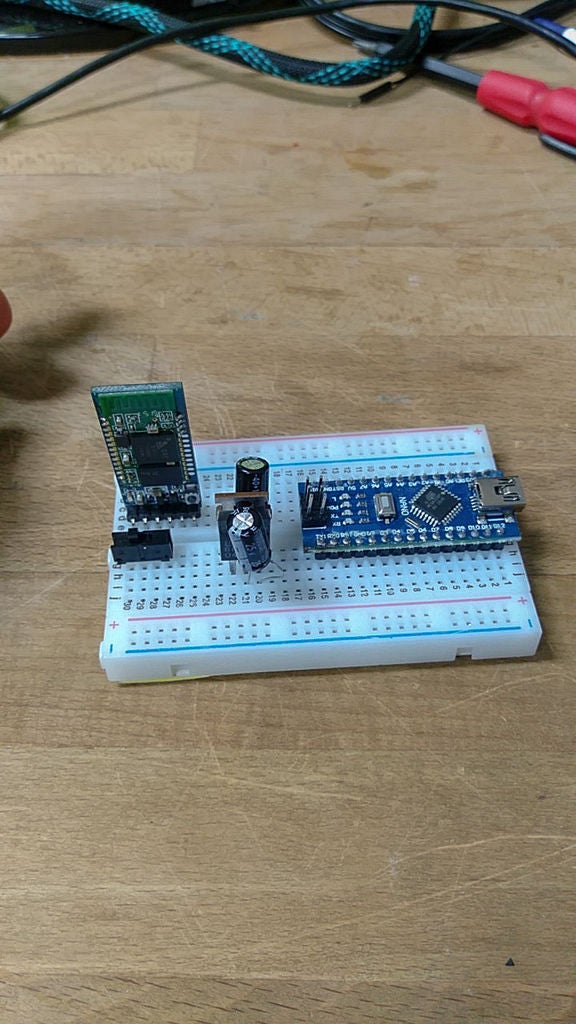
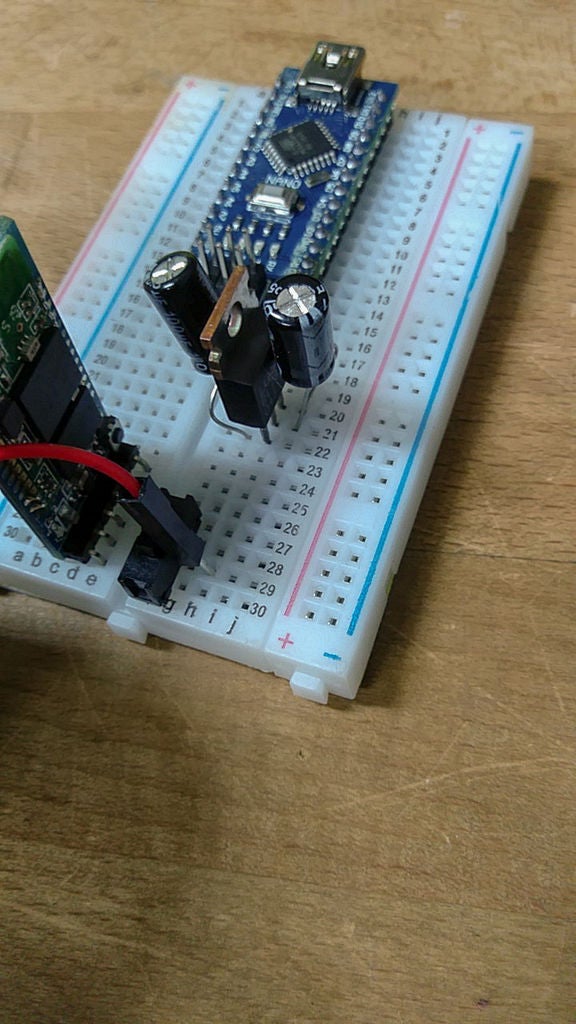
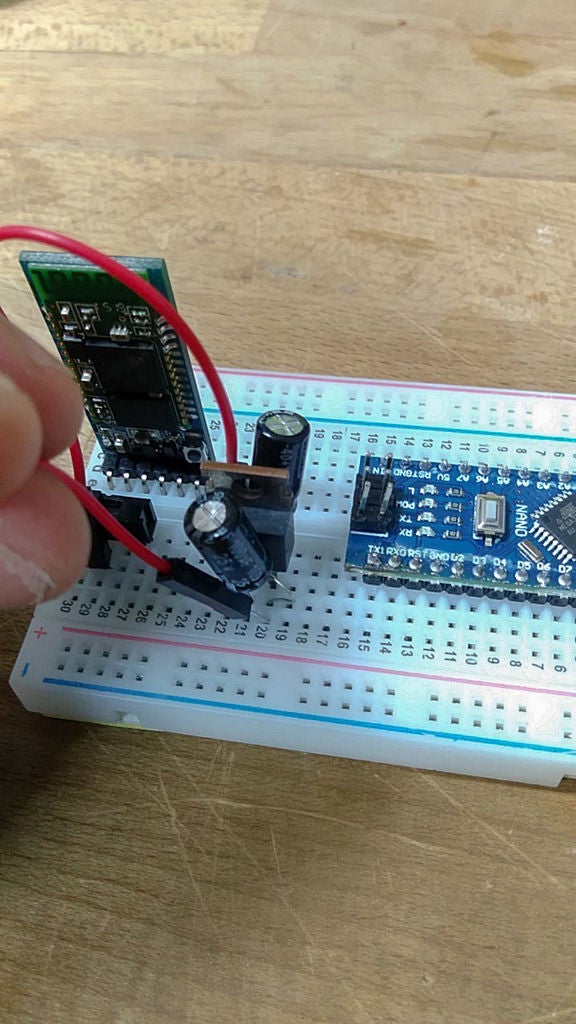
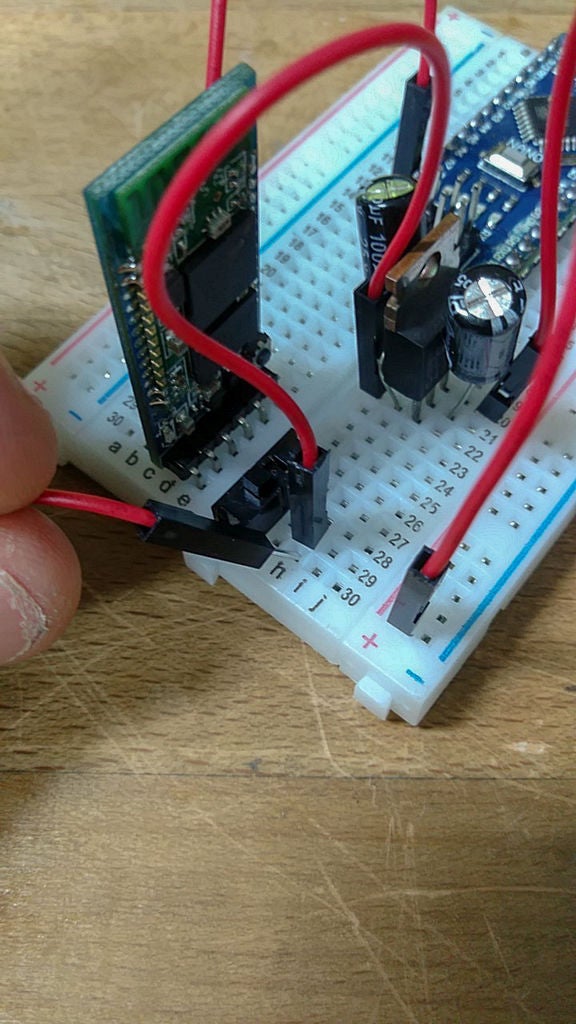
1。收集纳米,电压调节器,电容器,HC-05,跨接线,开关和面包板。
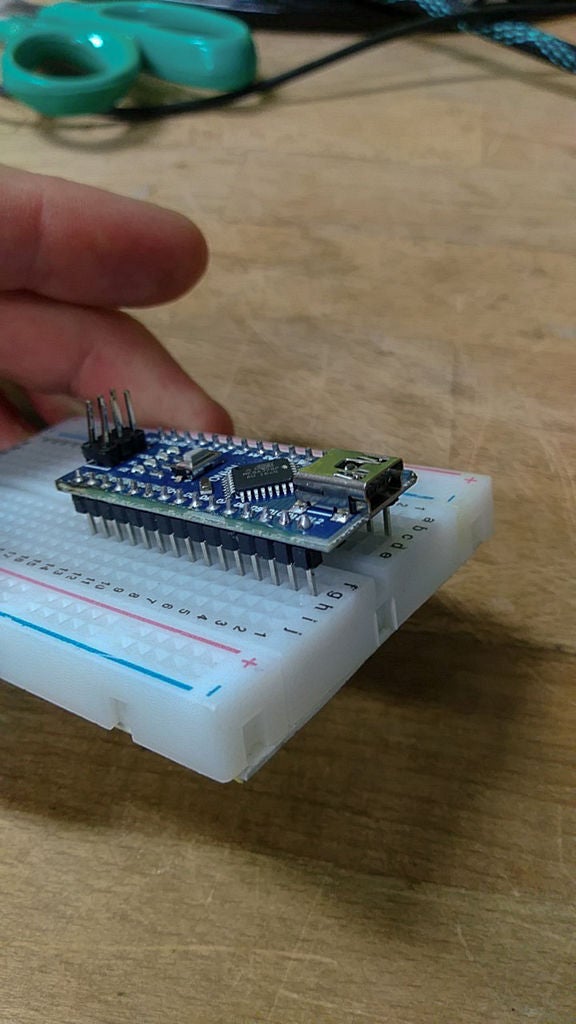
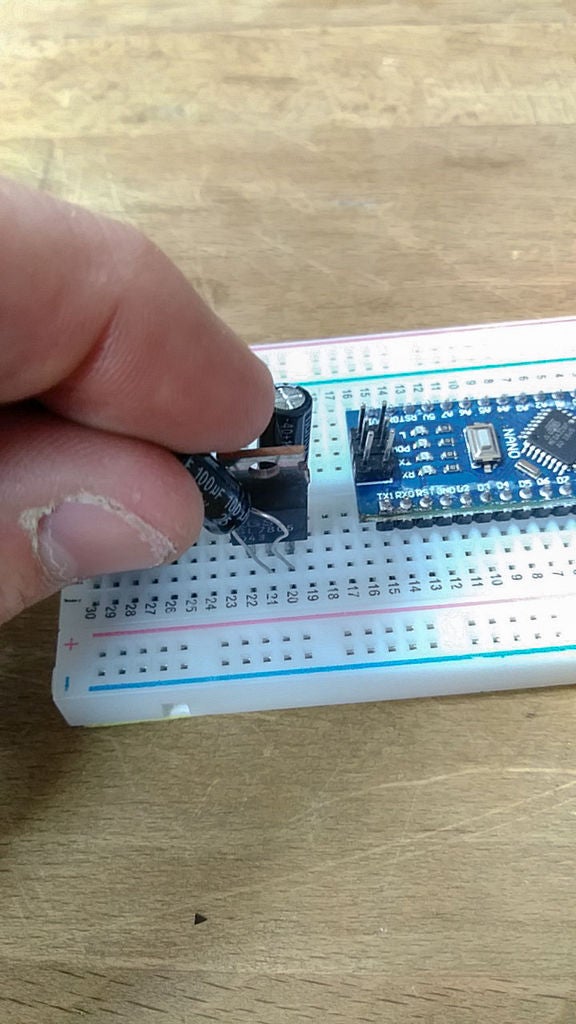
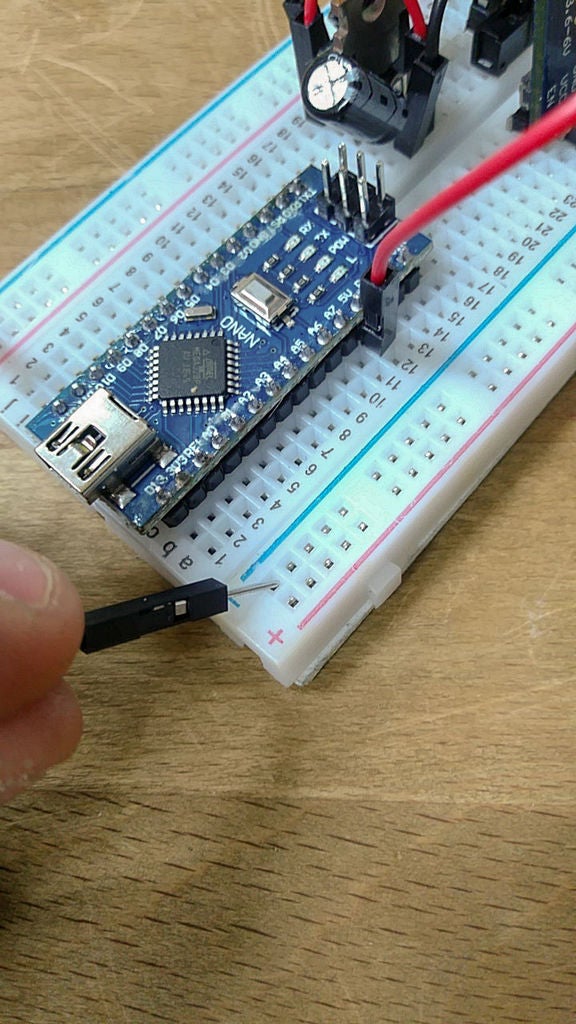
2。将Nano放在面包板上,使Nano的数字针脚12位于面包板上的G1位置。
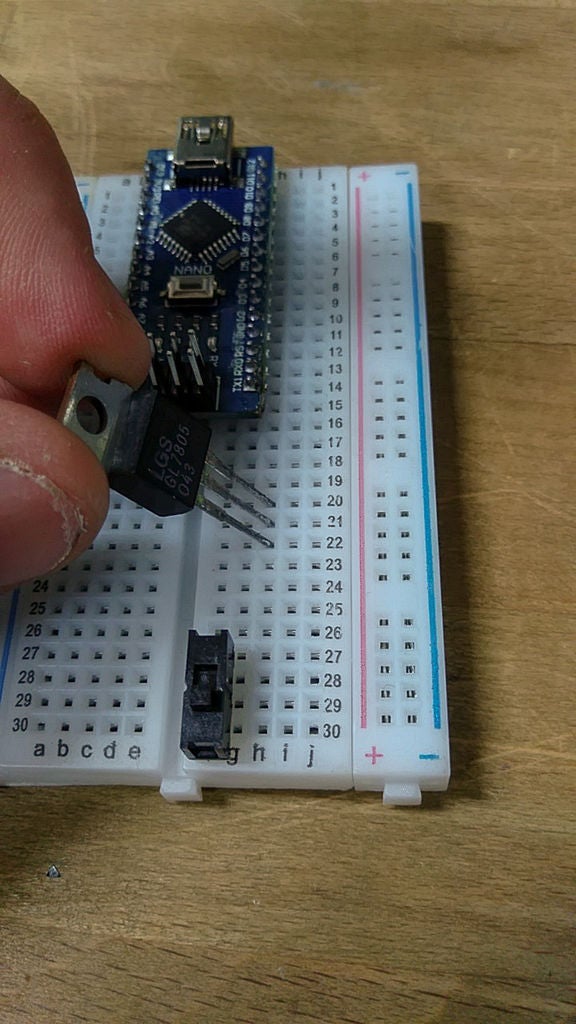
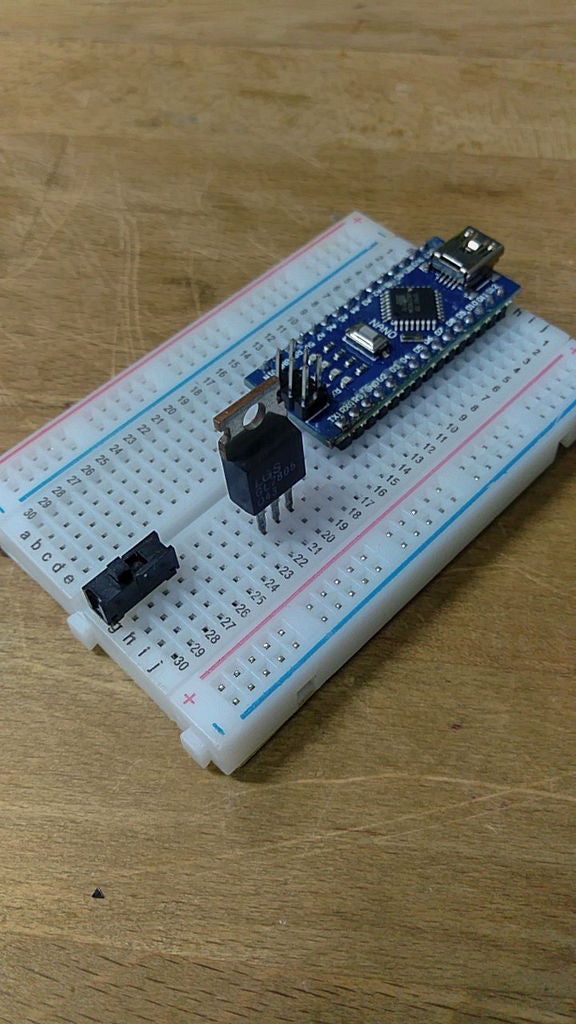
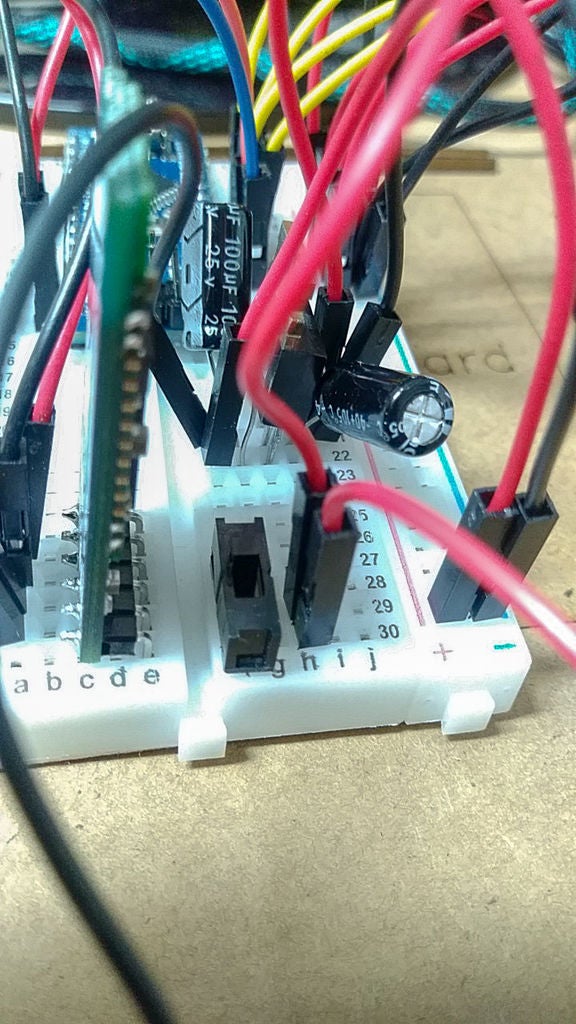
3。放置电压调节器使其引脚位于H20,H21和H22位置。这部分非常重要,因此请记下电压调节器的方向,因为一个引脚输入而另一个引脚输出。如果您在错误的方向上放置它,将无法工作!如果您定位面包板使Nano的USB端口背向您,则电压调节器的标记面应朝向右侧。查看图片以供参考。对不起,大喊大叫。..。
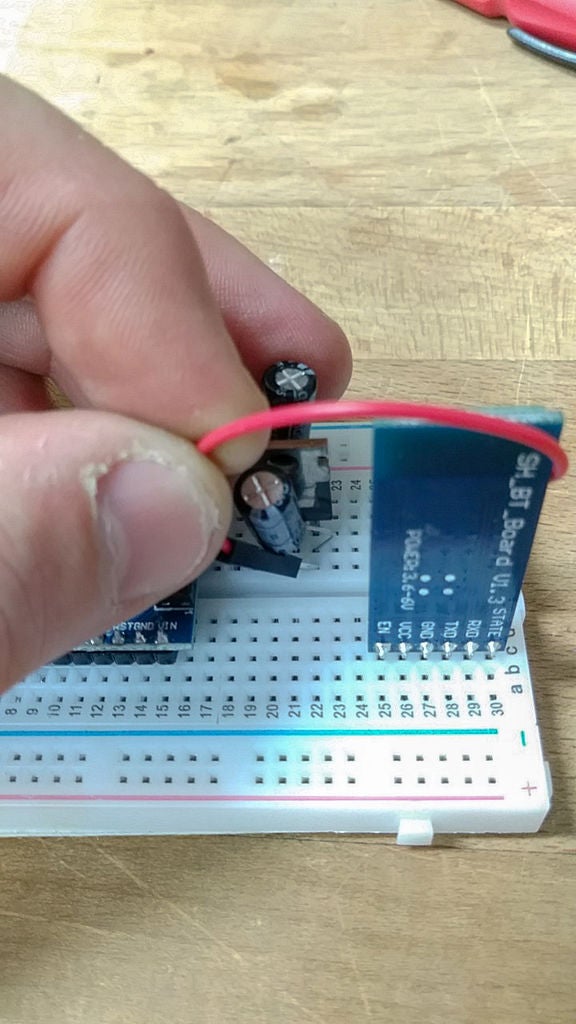
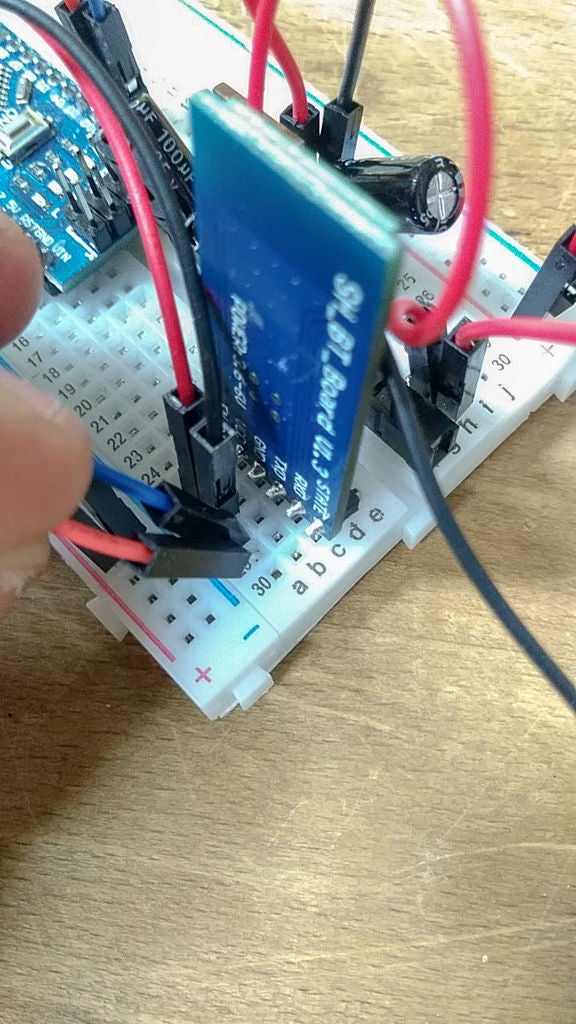
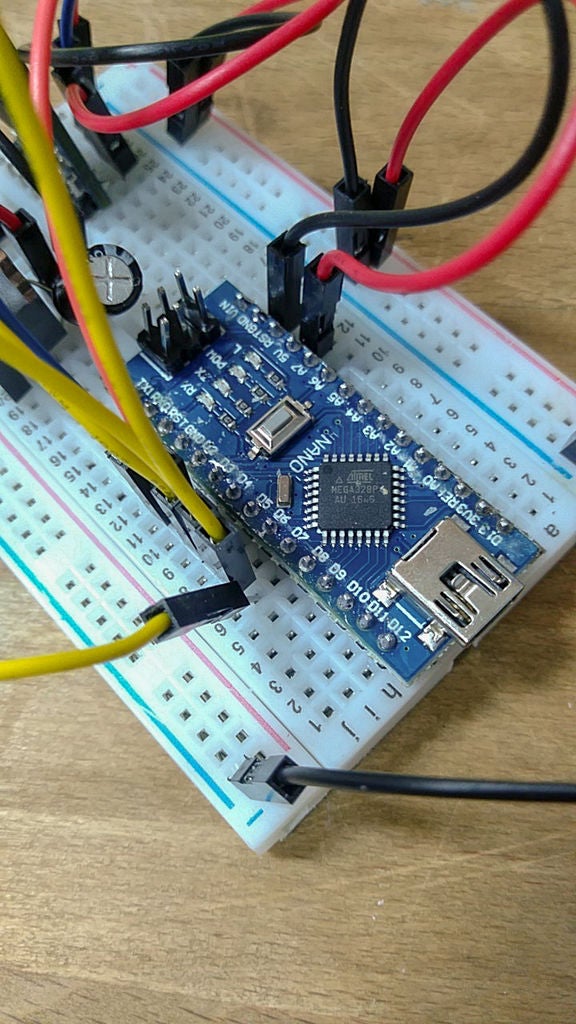
4。放置一个电容器,使负侧位于F21位置,正侧位于F22。在正面的引线上做一个小弯曲,以帮助它适应。
5。放置第二个电容,使其负侧位于位置I21,正极位于I20。
在正极的引线上做一个小弯,以帮助它适合。
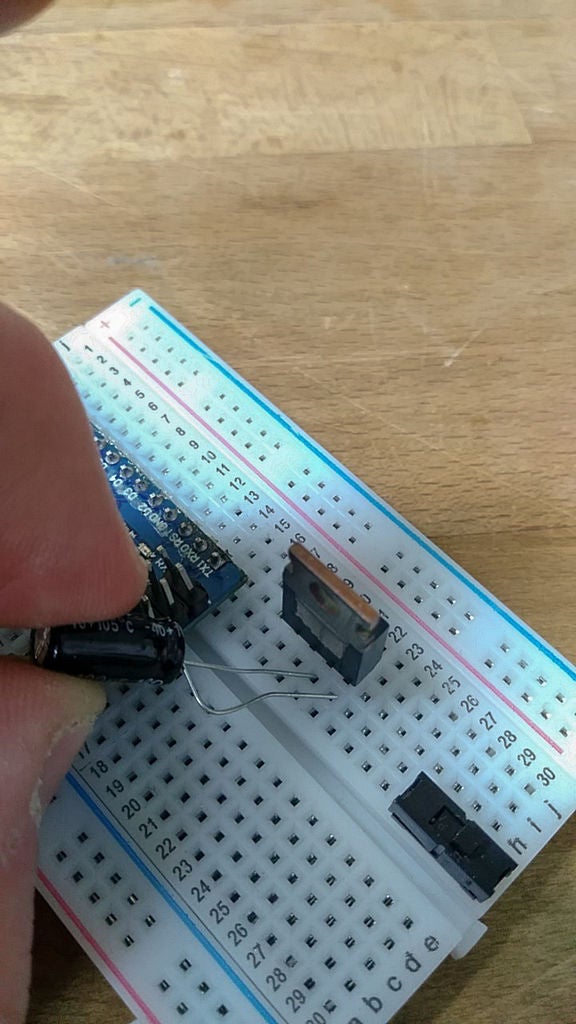
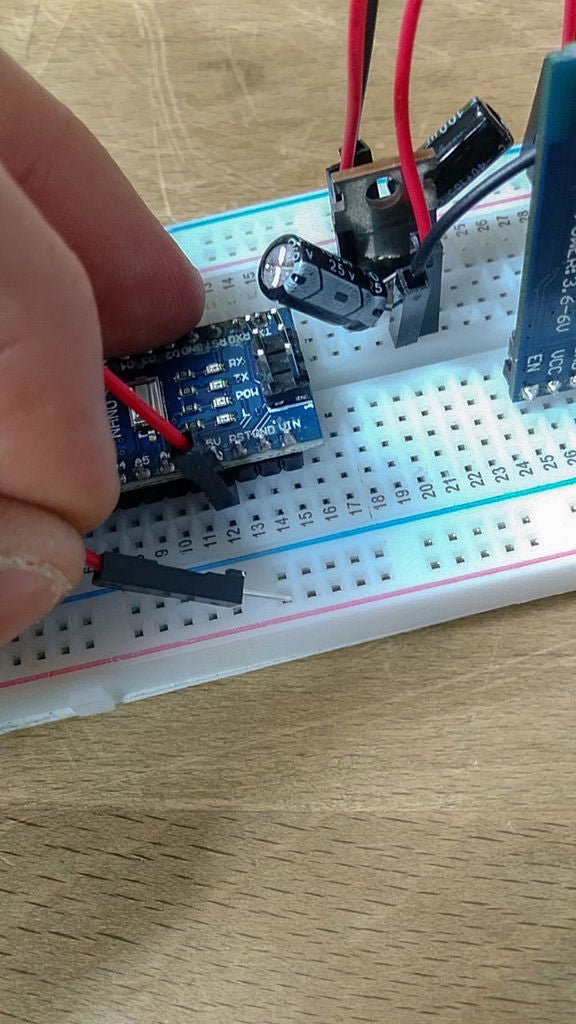
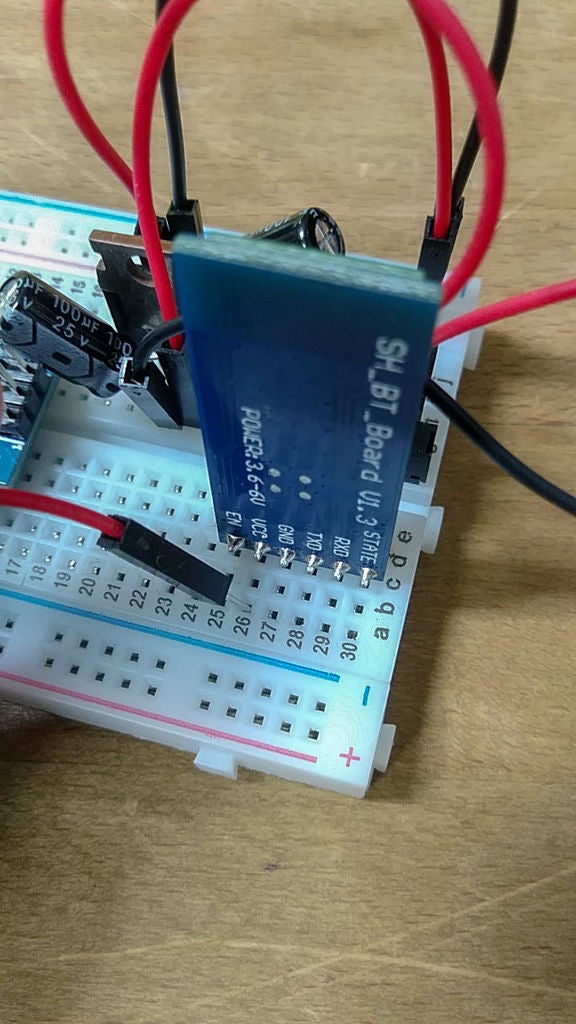
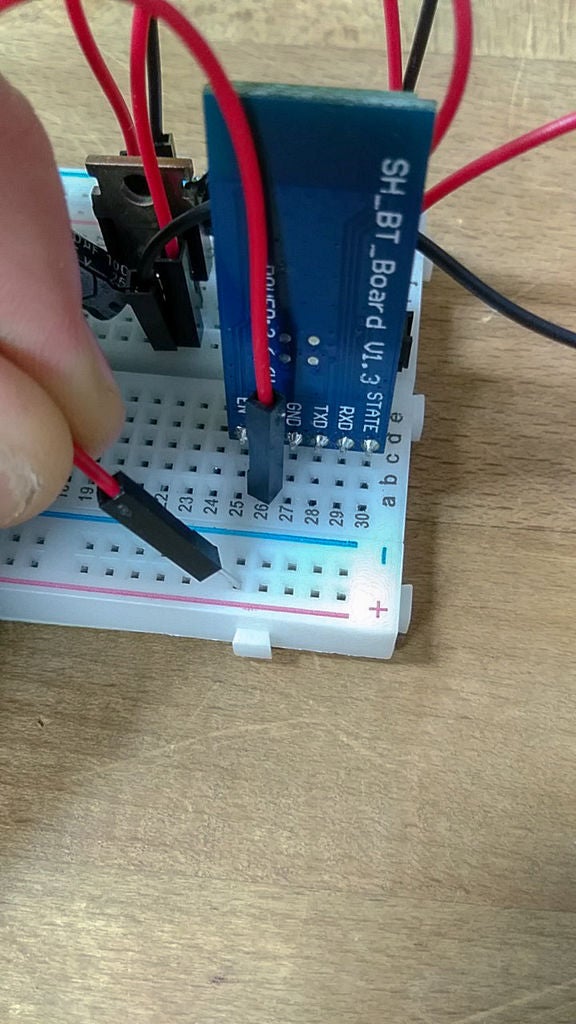
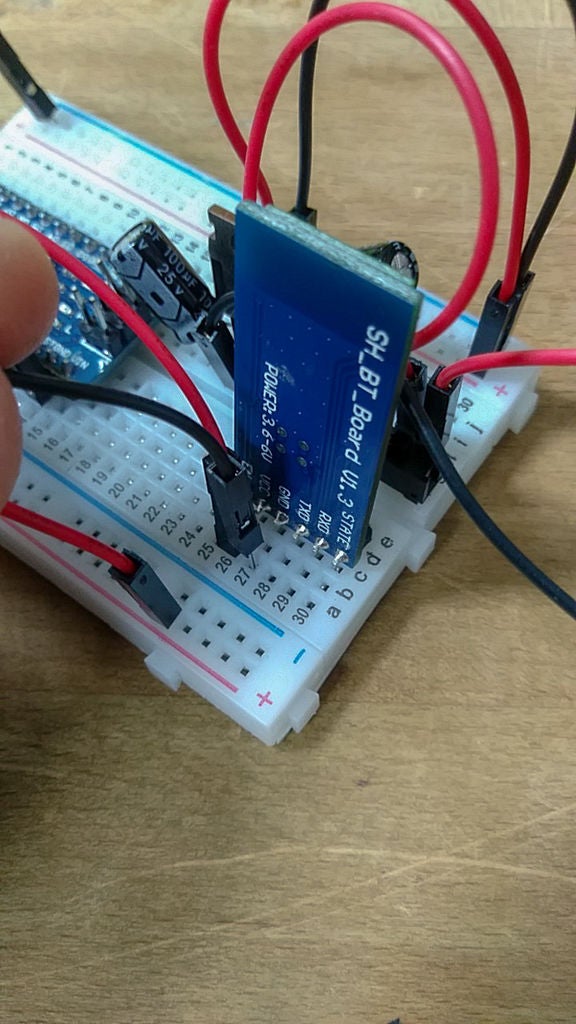
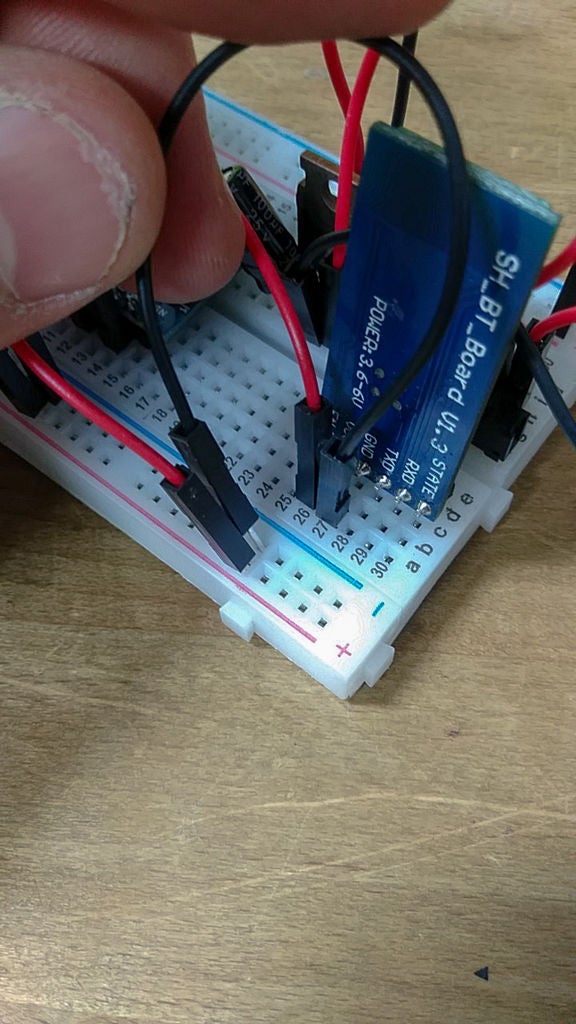
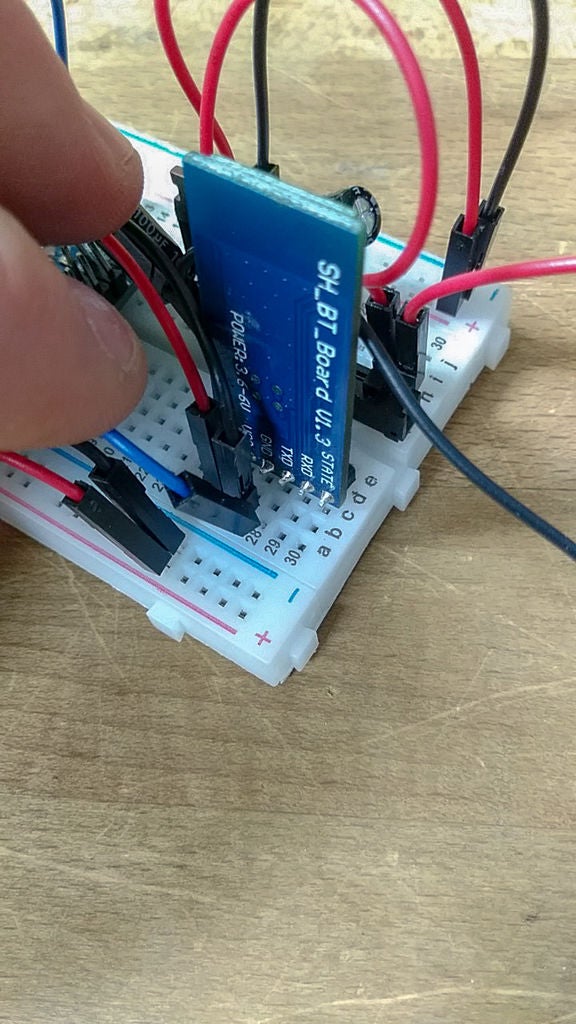
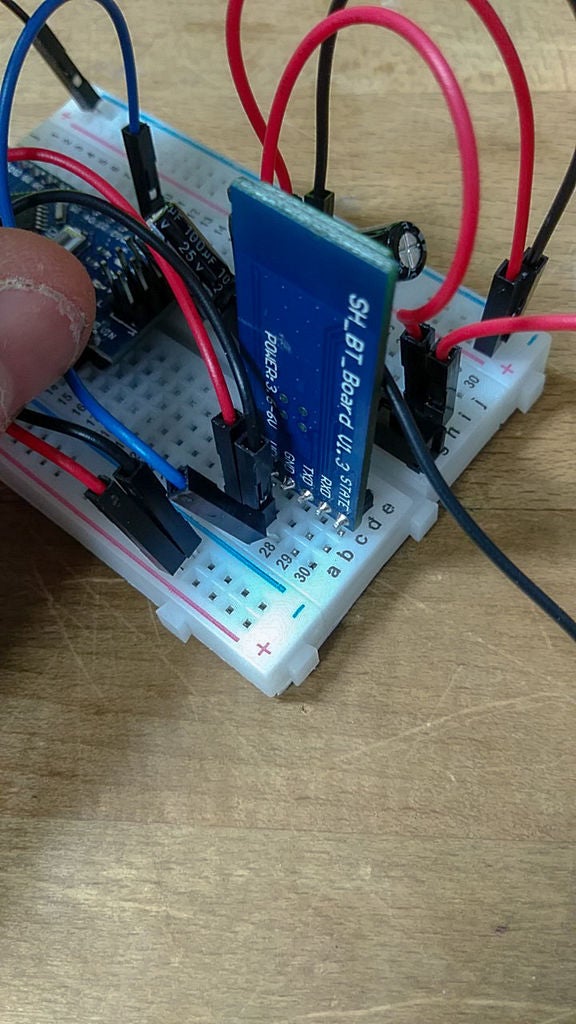
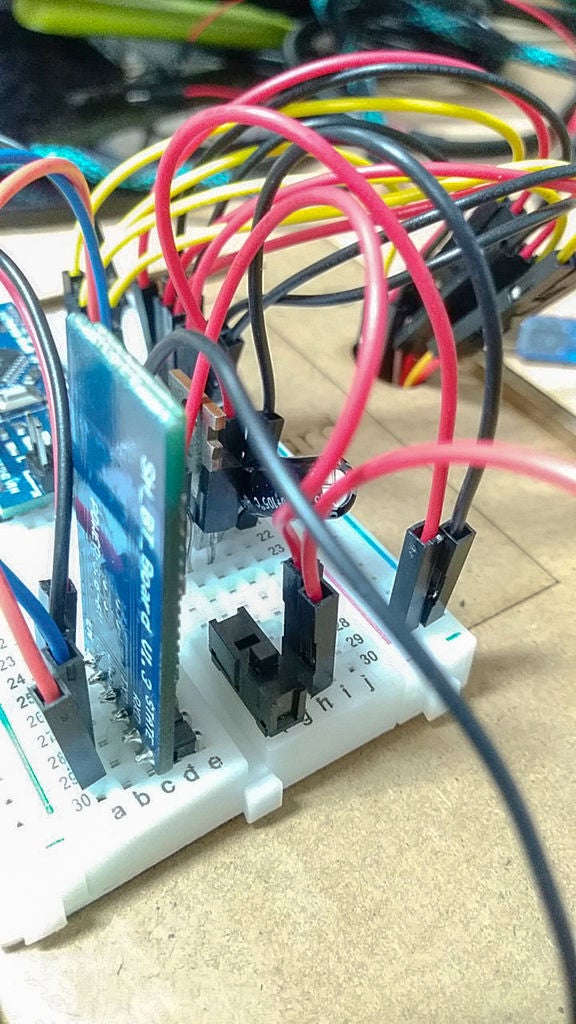
6。放置SPDT开关,使其三个引脚位于I30,I29和I28位置。
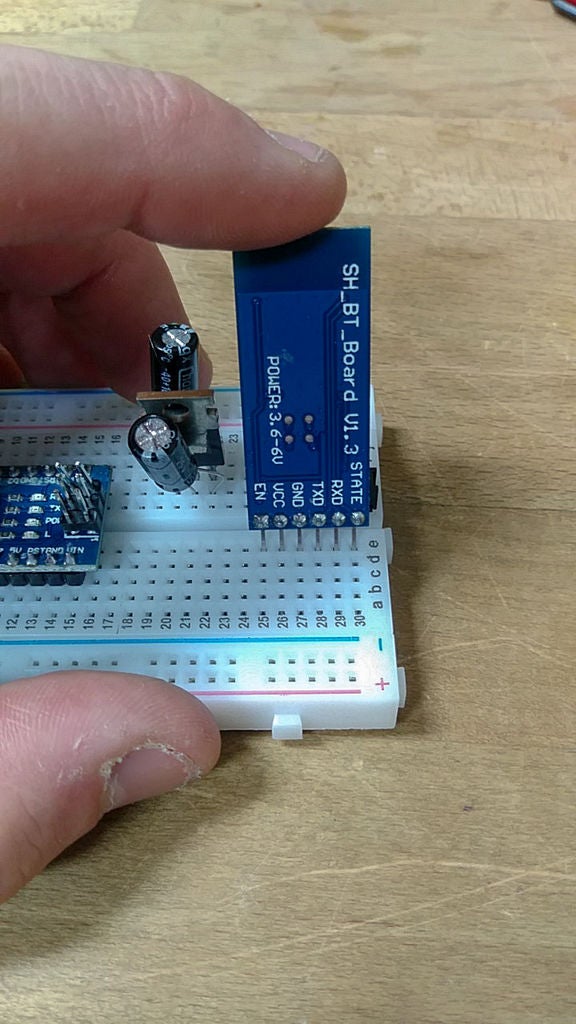
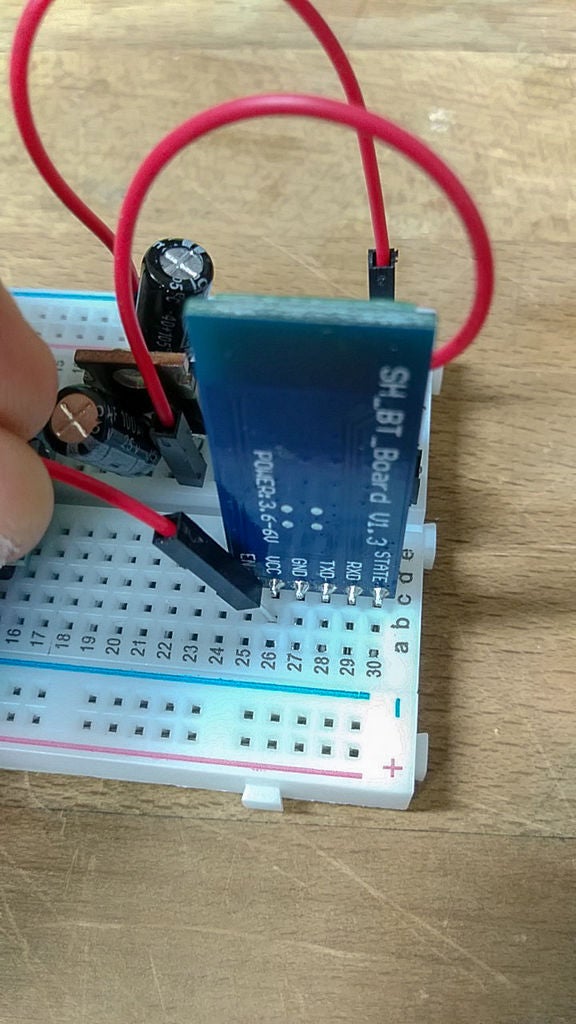
7。放置蓝牙模块,使其VCC引脚位于E26位置,GND位于E27,TXD位于E28,RXD位于E29。
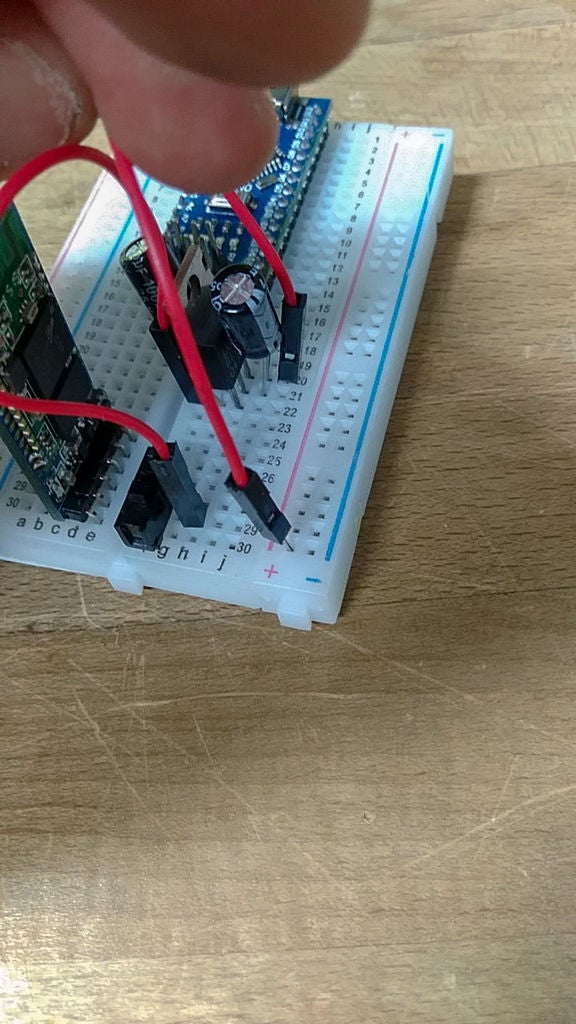
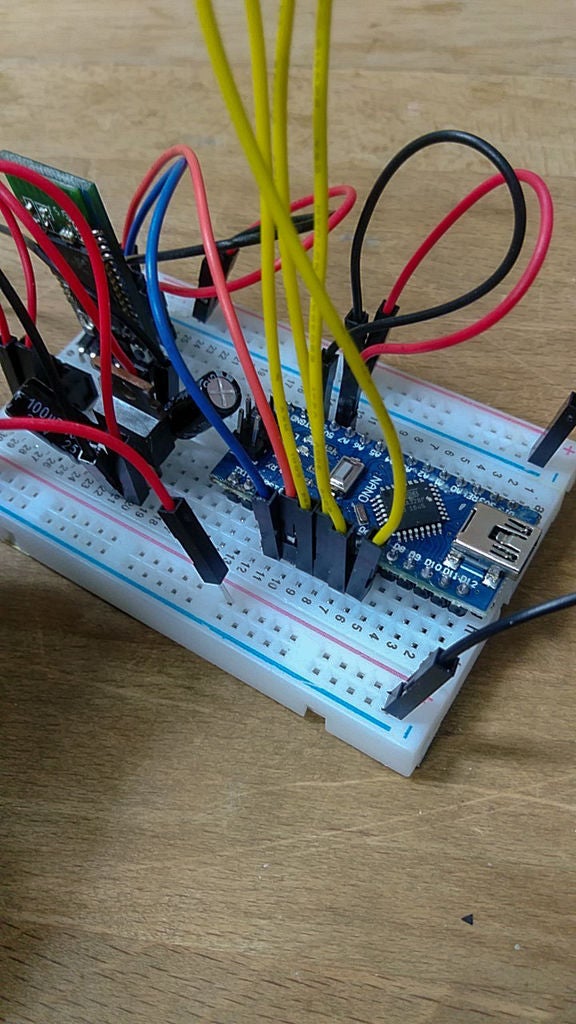
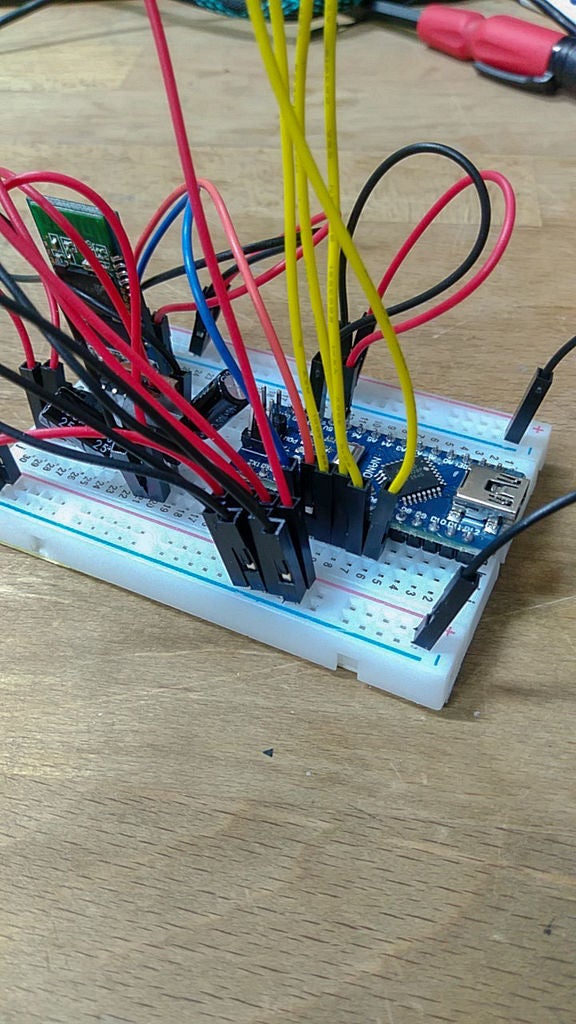
8。收集跳线将它们分成几堆颜色,使事情变得更容易。
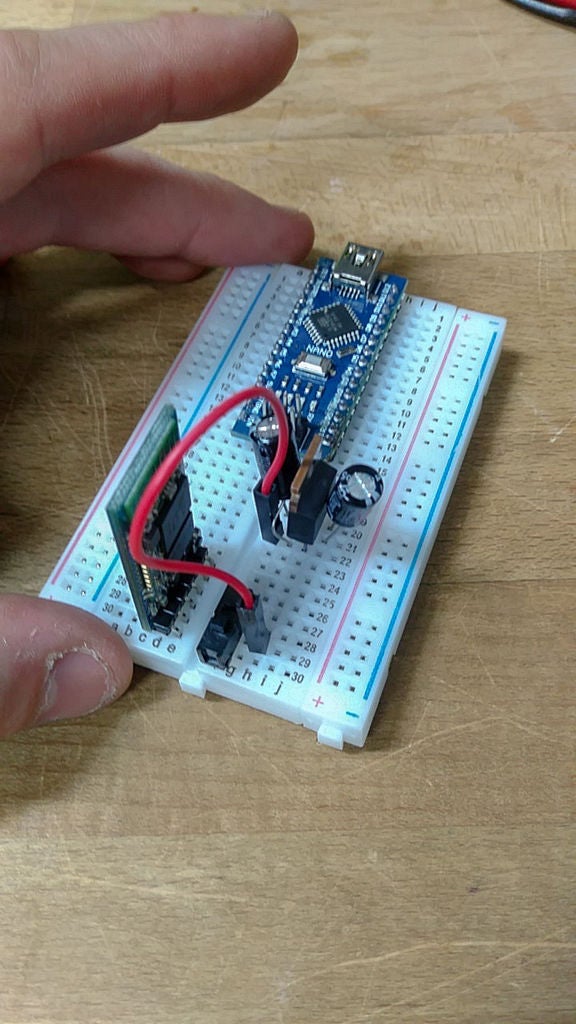
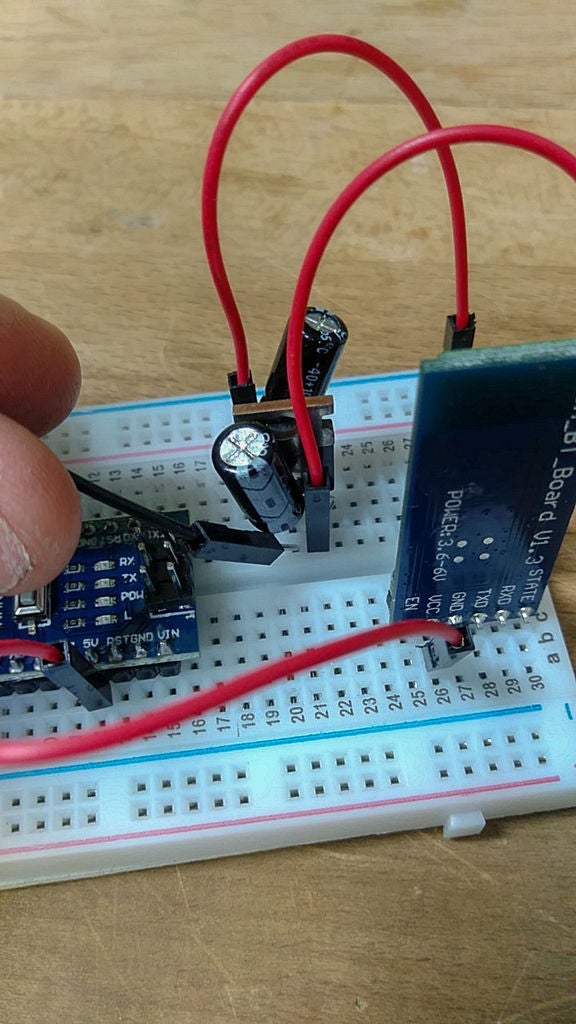
RED JUMPERS(电力线)
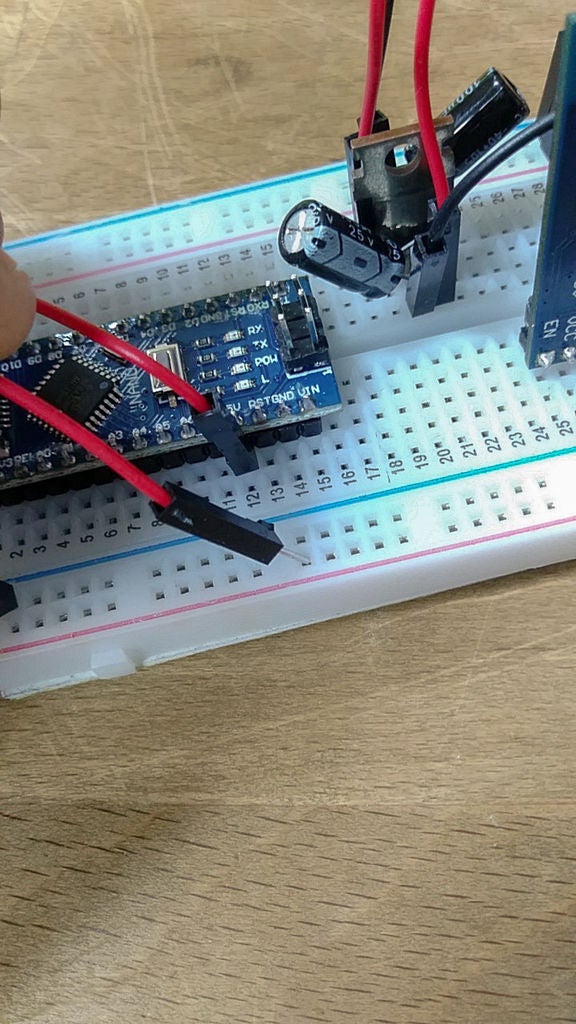
9。将第一个跳线的一端放在H30位置。留下这个跳线的另一端。
10。将第二个跳线的一端放入位置H29,另一端放入位置F22。
11。将第三个跳线的一端放入J20的位置,另一端放入面包板红线的远端。这是为电机创建一个5伏电源轨。
12。将第4,第5,第6和第7跨接线的一端放入面包板的电源导轨中,使它们组合在一起并靠近位置J12-J9。这将确保这些跳线靠近主体顶部的孔,伺服线将穿过该孔。将这些电线的另一端留下。这些将进入伺服电机的VCC引脚。
13。将第8个跳线放在B12位置。它应该与Arduino Nano的5Volt引脚位于同一行。将跳线的另一端放入面包板的红色导轨中。这是为传感器和设备(如我们的蓝牙模块)创建5伏电源。
14。将第9个跳线的一端放在面包板的A26位置,另一端放入面包板的电源导轨中。
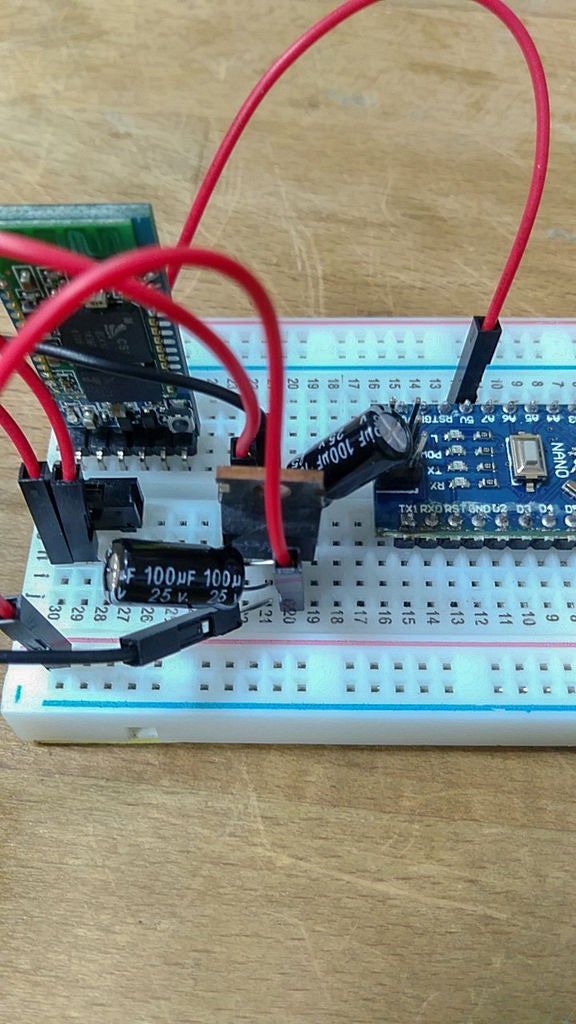
BLACK JUMPERS(地面线)
15。将第一个跳线的一端放入面包板的F22位置,让另一端自由。
16。将第二个跳线的一端放入位置J21,另一端放入面包板的蓝线,红色跳线旁边。这将为电机创造一个地轨。
17。将第3,第4,第5和第6跳线的一端放入面包板的蓝线和红色跳线旁边。让对方自由。这些将进入伺服电机的接地引脚。
18。将第7个跳线的一端放入面包板上蓝色导轨的远端,另一端放入面包板相对的蓝色导轨的远端。这将连接面包板的两个蓝色导轨。
19。将第8根跨接线的一端放入面包板的B14位置。这应该与Arduino Nano的GND引脚位于同一行。将跳线的另一端放入面包板的蓝色导轨中。通过这样做,您将所有接地连接到Arduino的接地引脚。这对机器人的正常操作至关重要。所有理由必须连接。
20。将第9根跨接线的一端放入位置A27,将另一端放入面包板的蓝色导轨中。这是为了将蓝牙模块的GND引脚连接到面包板的接地导轨。
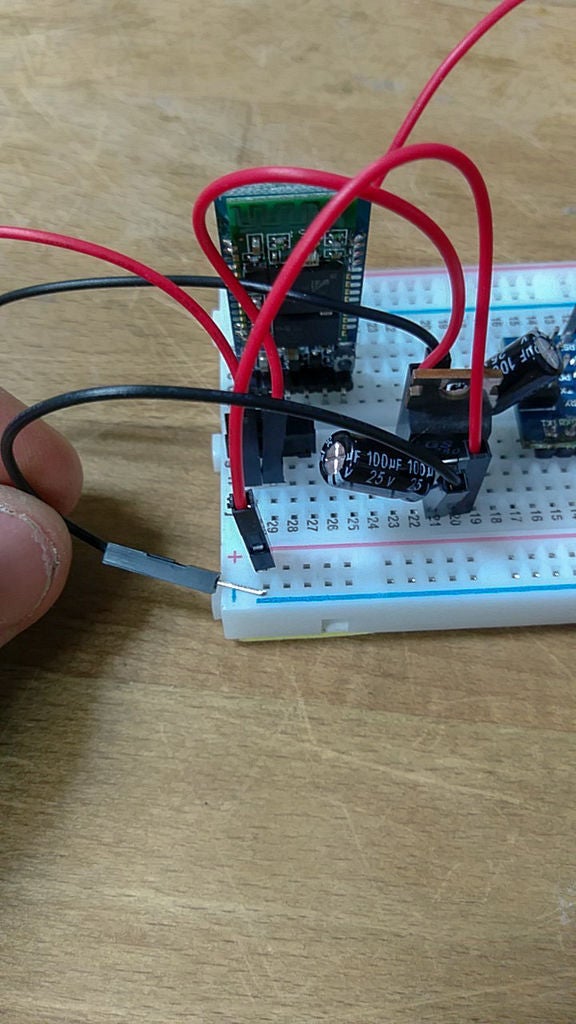
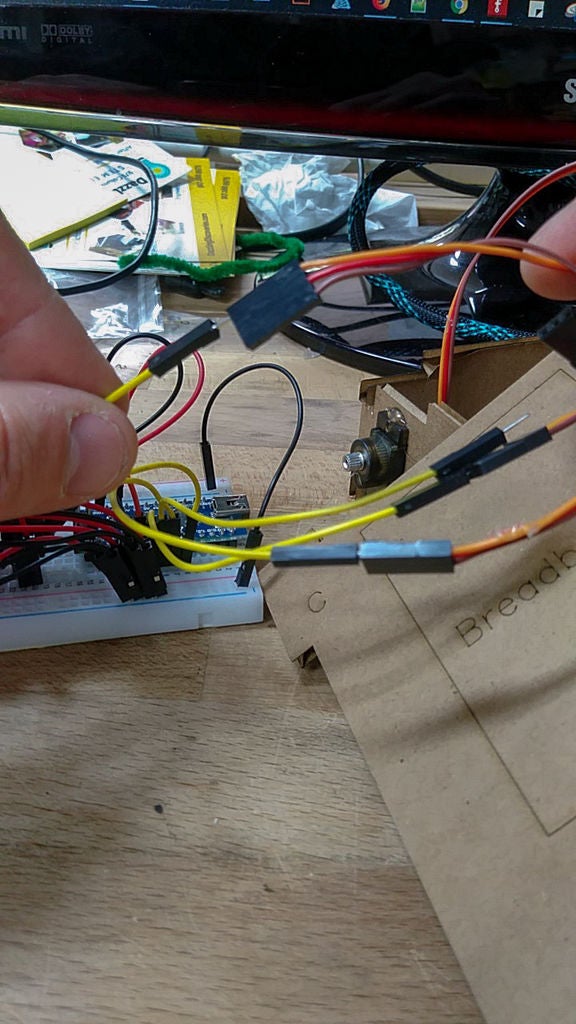
剩余颜色
21。将每根黄色跨接线的一端放入面包板的位置I9,I8,I7和I6。让对方自由。每根跨接线的自由端将连接到伺服电机的信号引脚。位置I9,I8,I7和I6应分别与Arduino Nano的数字引脚4,5,6和7位于同一行。如果不是,只需确保每个黄色跳线的一端与Nano的数字引脚4,5,6和7位于同一行。
22。将蓝色跳线的一端放入位置I11,将另一端放入位置A28。这是为了将Nano的数字引脚2连接到蓝牙模块的TXD引脚。
23。将橙色跳线的一端放入位置I10,将另一端放入位置A29。这是为了将Nano的数字引脚3连接到蓝牙模块的RXD引脚。
用接线图仔细检查连接,然后转到下一步!
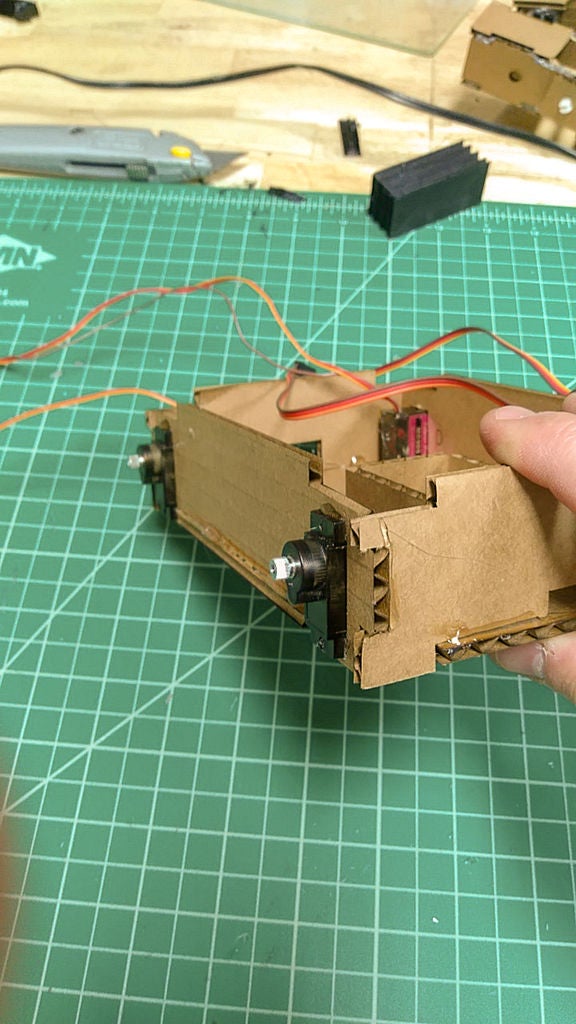
步骤5:将身体部位放在一起
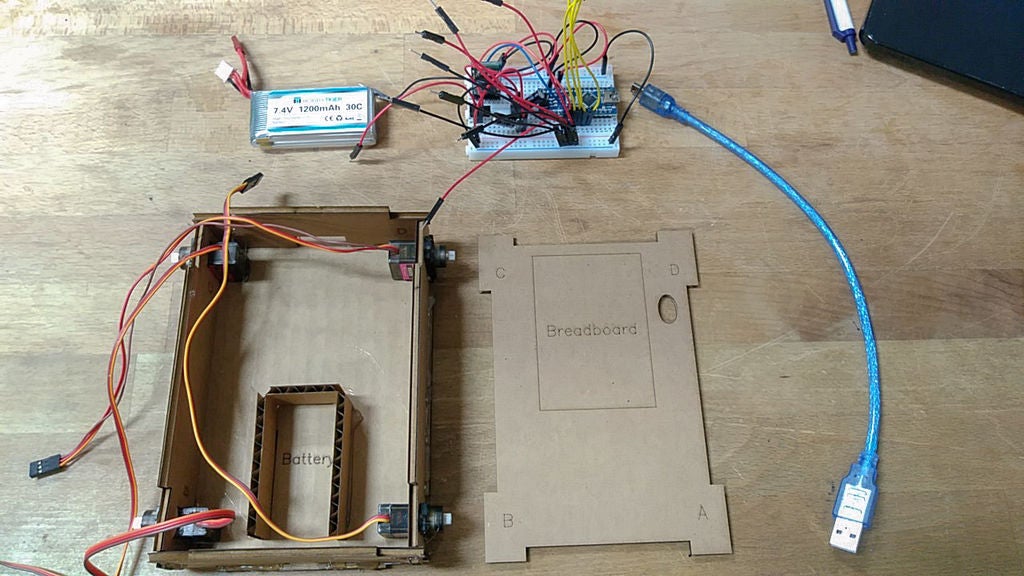
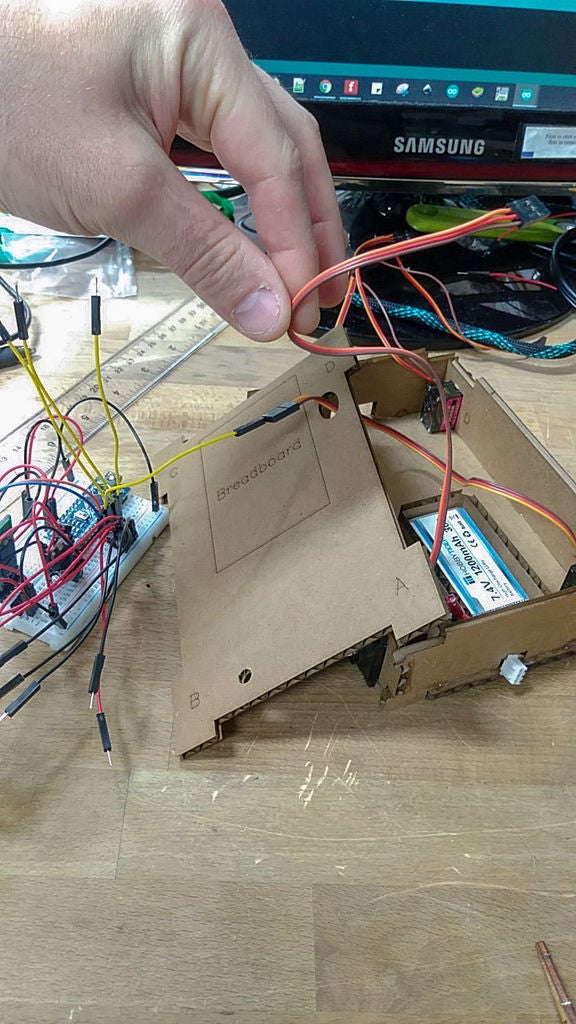
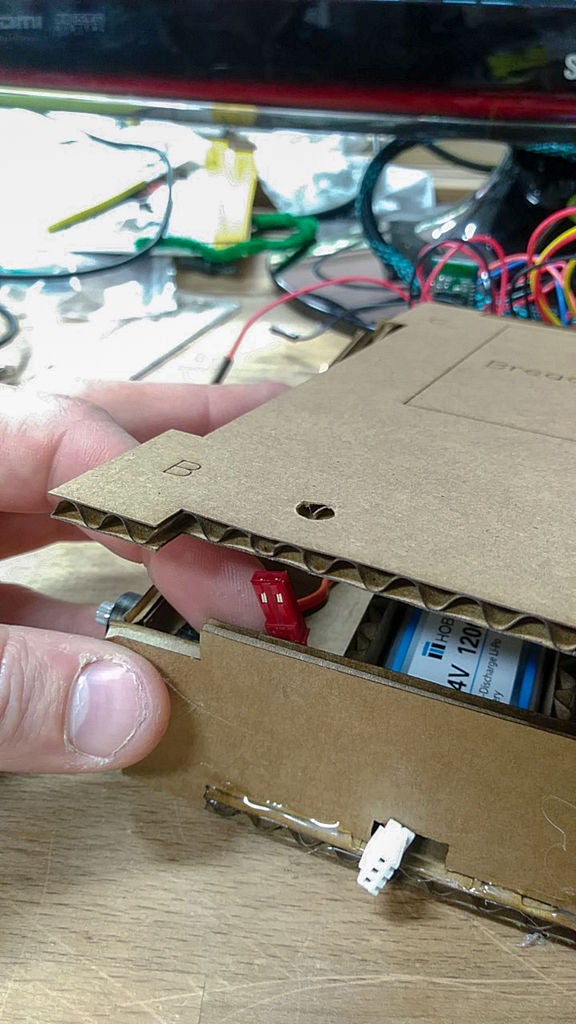
我们差不多完成了。现在我们要将伺服电池和电池连接到我们的面包板上。
收集有线面包板,附有舵机的机身和机身顶部。车身顶部标有A,B,C,D和面包板。
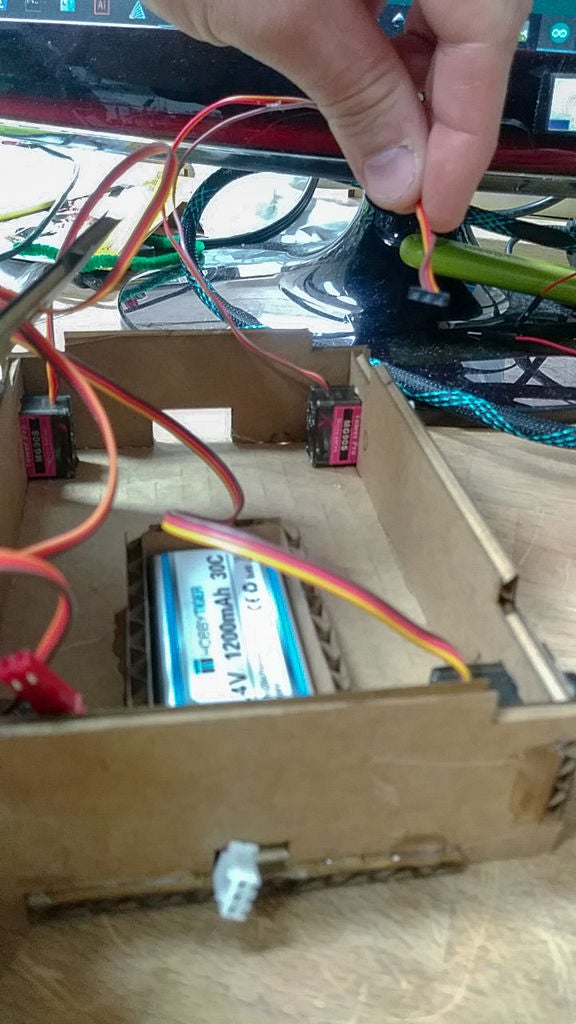
连接电机电池
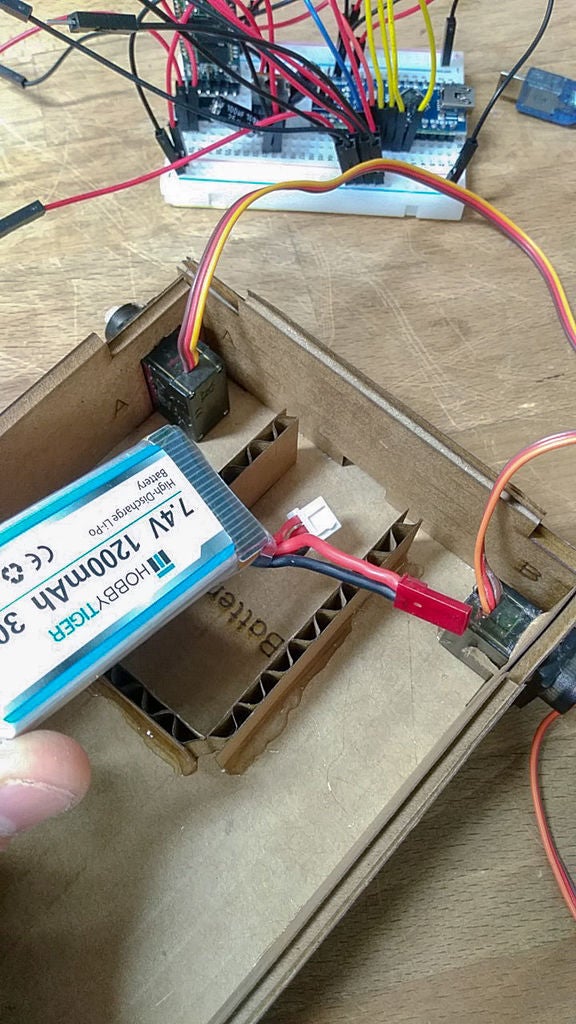
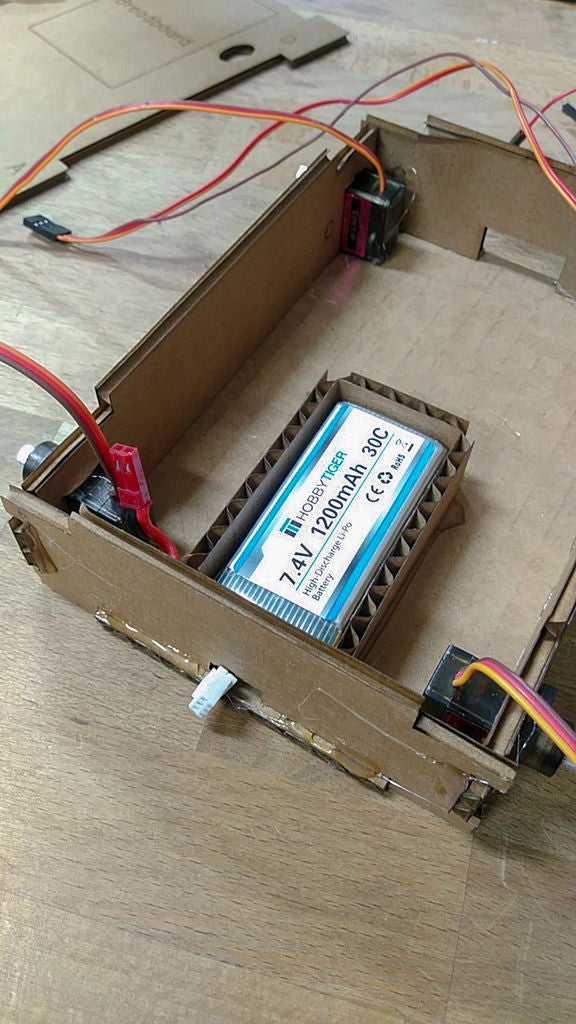
1。将电池组放入机身的电池座中。
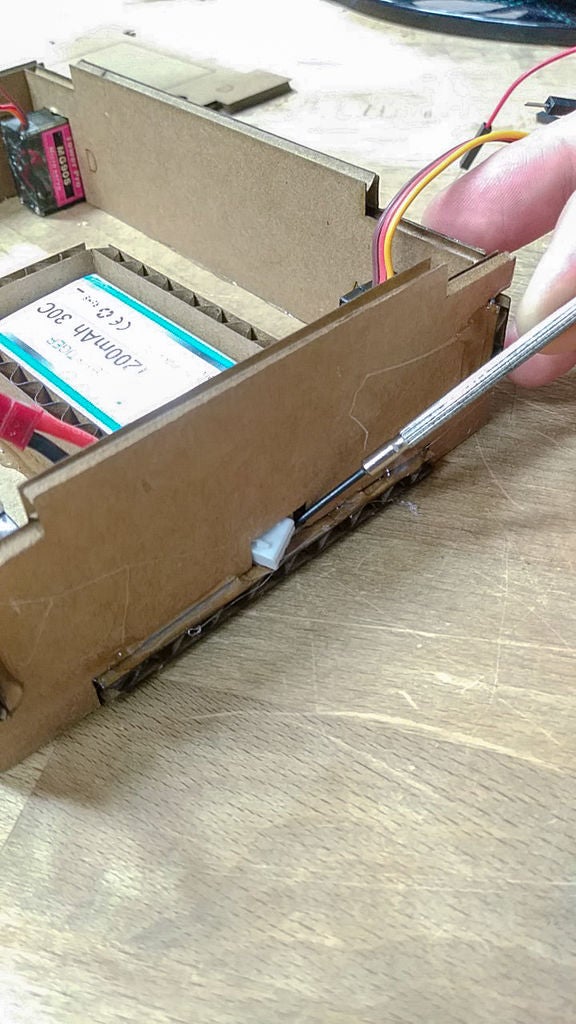
2。应该有两组来自电池的电线。将带有白色盖子的三根电线穿过车身侧壁的小孔。这是为了将电池连接到充电站而无需从机器人中取出电池。
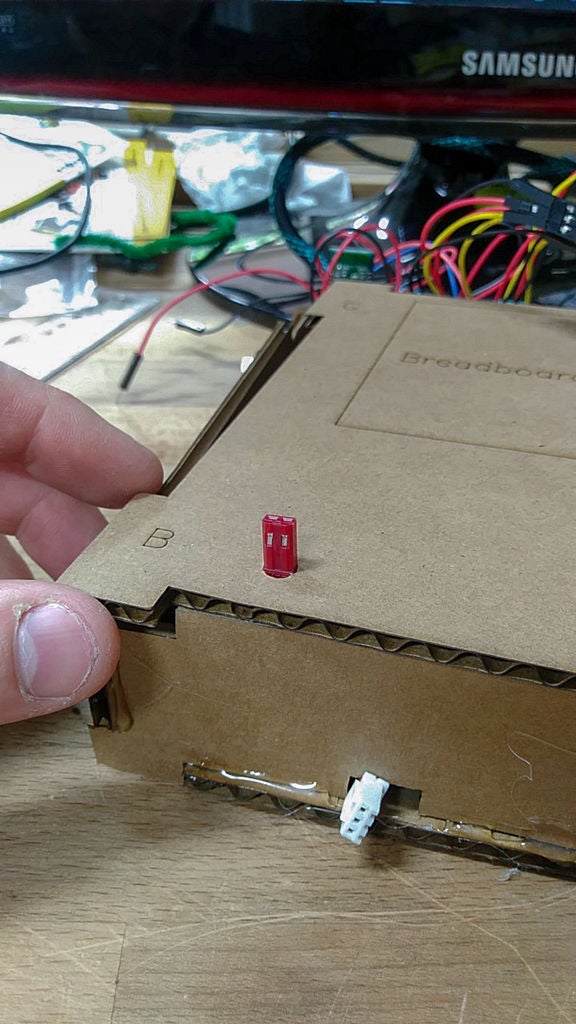
3。将带有红色帽的两根电线穿过车身顶部的小孔。
4。确保面包板上的开关设置为OFF。我意识到交换机没有ON或OFF标签。但是,如果您按照说明连接了所有内容,则OFF位置是切换到Arduino时的按钮。
5。将黑色跨接线的自由端连接到电池的GND引脚。
6。将红色跨接线的自由端连接到电池的Vout引脚。
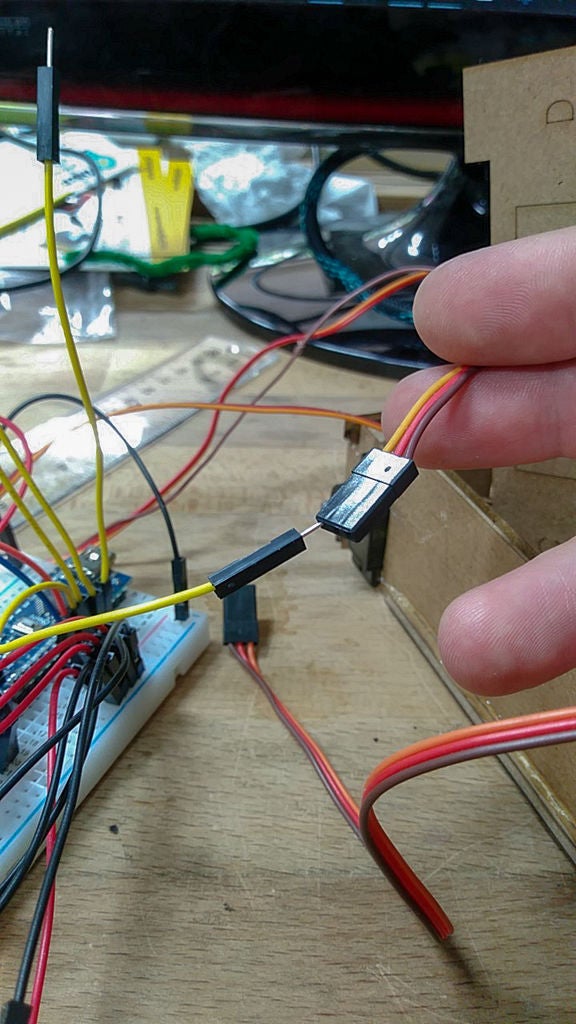
连接伺服器
7。我们将逐个连接伺服器以确保它们正确连接。这是关键步骤之一。但是,不要担心。如果以错误的顺序连接伺服电机,您可以随时拆下并重新连接跳线以便写入。
8。将伺服A的导线穿过车身顶部的孔。
9。将位置I9的黄色跨接线的自由端连接到伺服A电机的信号引脚。信号引脚应为伺服的橙色线。如果它的颜色不同,它应该位于伺服接地线的另一侧。在任何情况下,请参阅伺服电机的规格以确保正确接线。
10。将面包板最近位置J12的红色跳线的自由端连接到伺服A的VCC引脚。
11。将刚刚连接的红色跳线旁边的黑色跳线的自由端连接到伺服A的GND引脚。
12。对于伺服器B,C和D,重复步骤2到5.对于黄色跳线,你想连接它们,因此数字引脚4进入A,5进入B,6进入C,7进入D.这很重要代码假定这种连接安排。对于红色和黑色跳线,只要红色跳线连接到伺服器的VCC引脚并且黑色跳线连接到伺服器的GND引脚,顺序就无关紧要了。
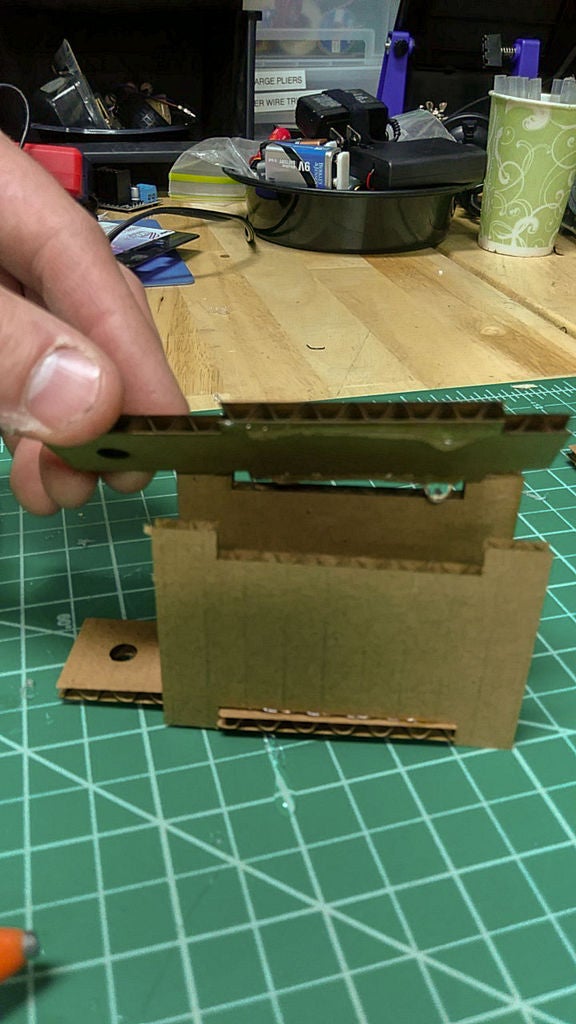
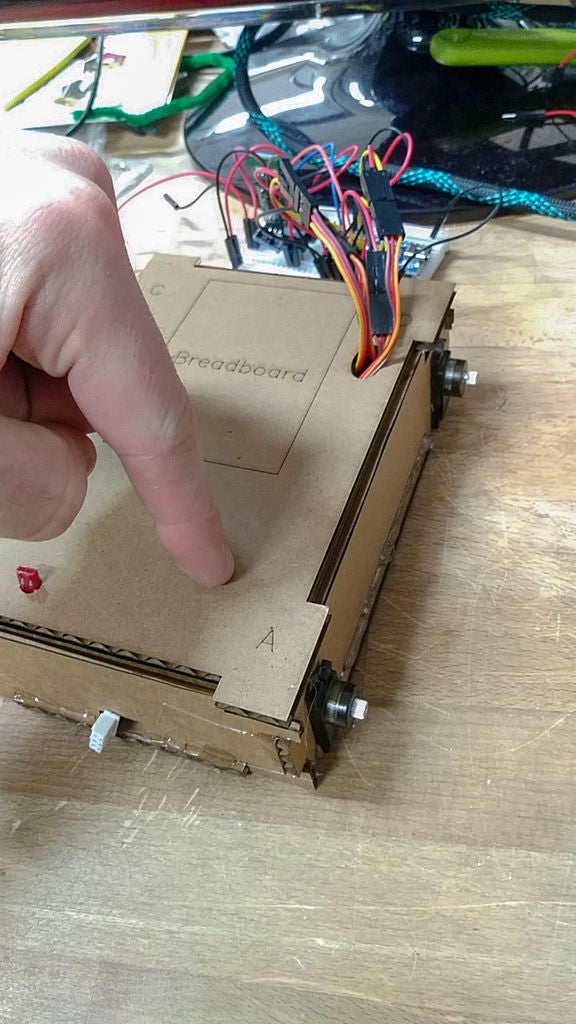
13。完成所有连接后,将主体顶部放在主体上,使其标签与主体的凹痕对齐。
14。轻轻按下车身顶部,使其卡入到位。身体的标签将适合身体顶部的凹痕。这应该在一起。您可以随时添加一些胶水来固定顶部,但我喜欢不用胶水,以防我需要更换电池或电机。
第6步:上传和测试代码
现在我们可以上传我们的代码了。下载提供的代码。您需要安装Arduino软件。这是一个简单的过程。请参阅他们的网站获取相关说明。
https://www.arduino.cc/en/Main/Software
1。将Arduino Nano连接到计算机上的免费USB端口。
2。打开Arduino IDE中的代码。
3。从菜单中选择电路板并选择端口。
4。上传代码。
5。将开关转到ON位置。电机应移动到90度。
暂停查看代码。您将在void setup()中看到,在设置完所有引脚后,第一个动作是让机器人调用stand()函数。这将腿移动到位,因此机器人站立。在提供的代码中,这将腿移动到90度。现在,这很好。这将允许我们连接腿,使每条腿以90度为中心。我们需要这个作为参考点,需要一个合适的参考点以确保腿部正确移动。
如果向下滚动到代码底部,您将看到stand()函数的详细信息。它非常简单。它将每个伺服的位置设置为90然后将每个伺服写入90.您还会注意到一些被注释掉的行。这些是我发现对机器人来说更好的位置。使用您的自由裁量权来查找最适合您的机器人的值。
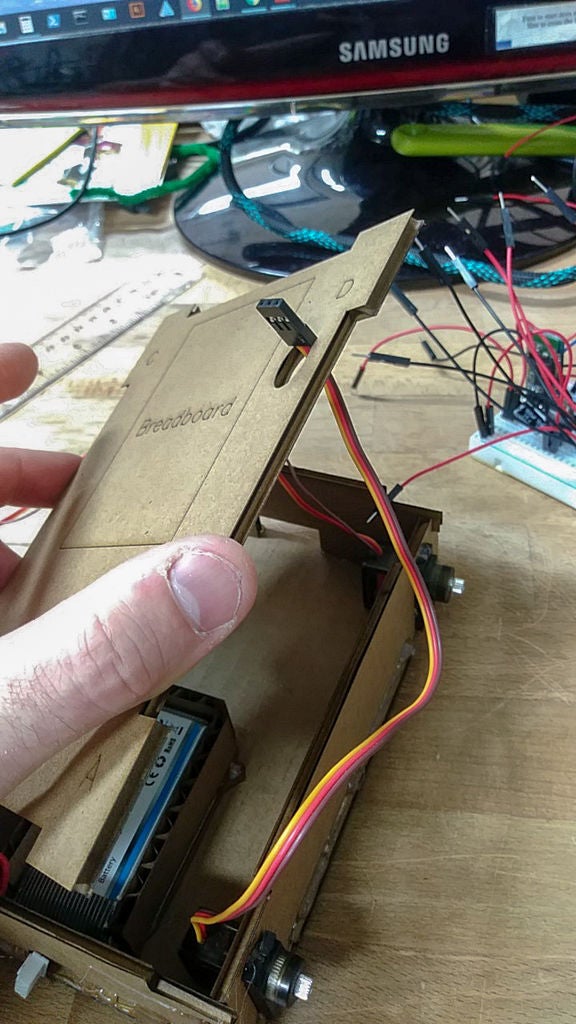
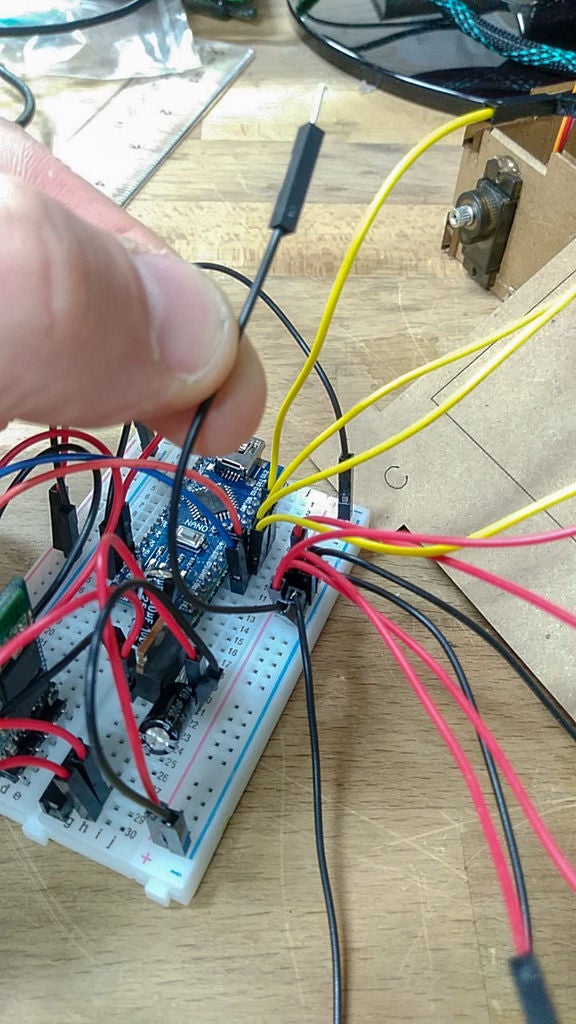
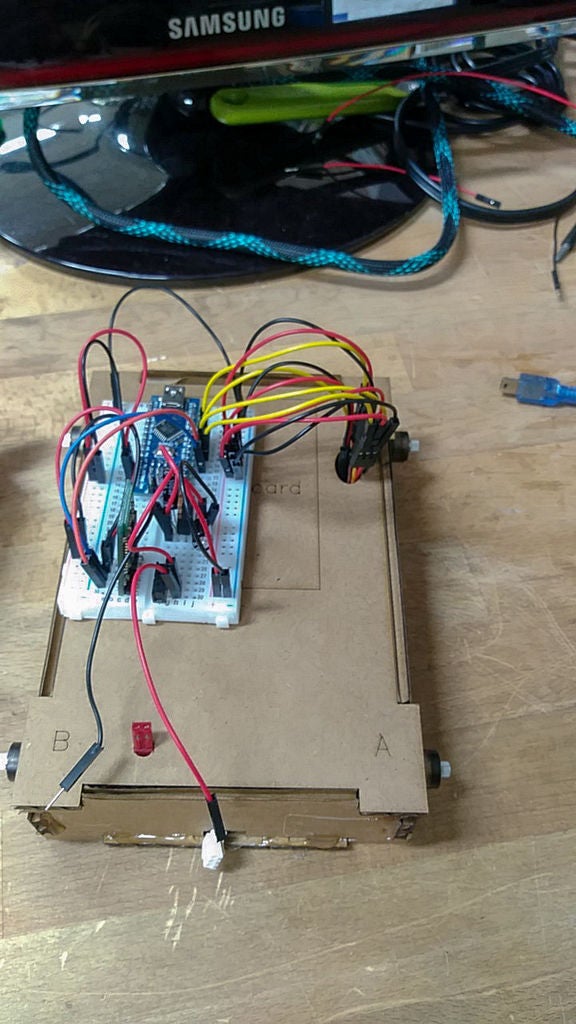
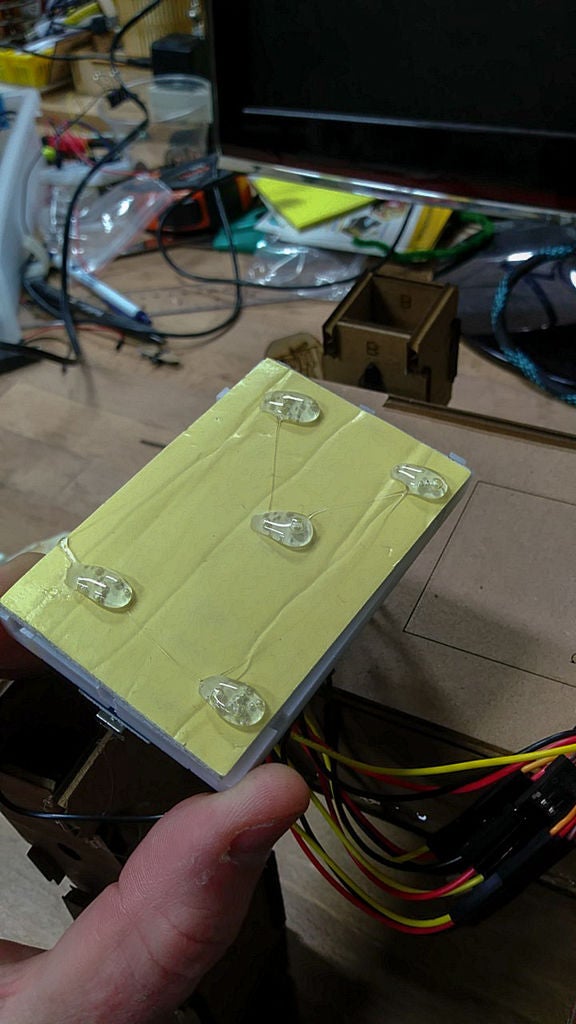
一旦代码上传并且一切正常,将面包板贴在主体顶部,在面包板下面放几颗热胶,然后将面包板放在标有Breadboard的区域在身体顶部。
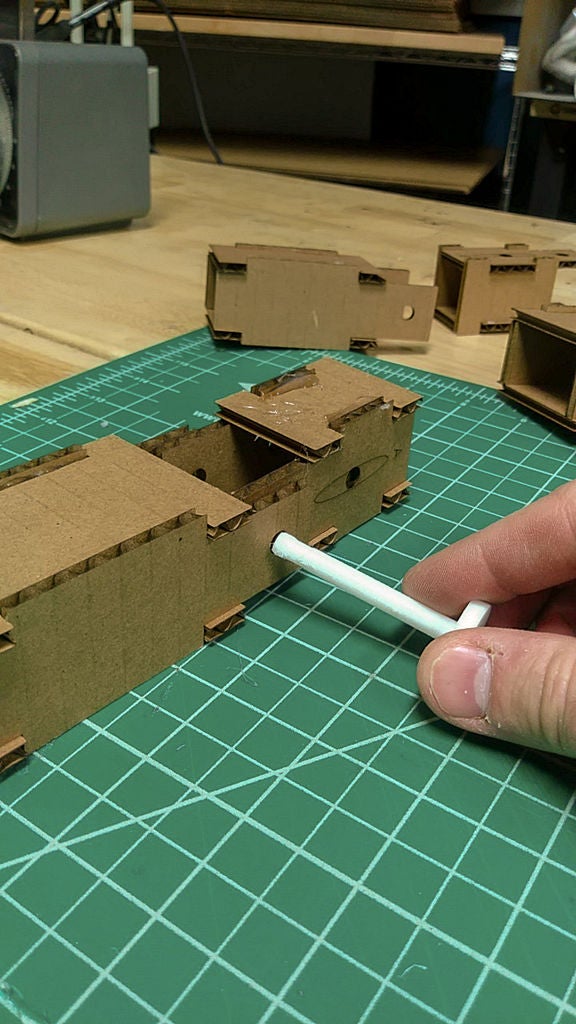
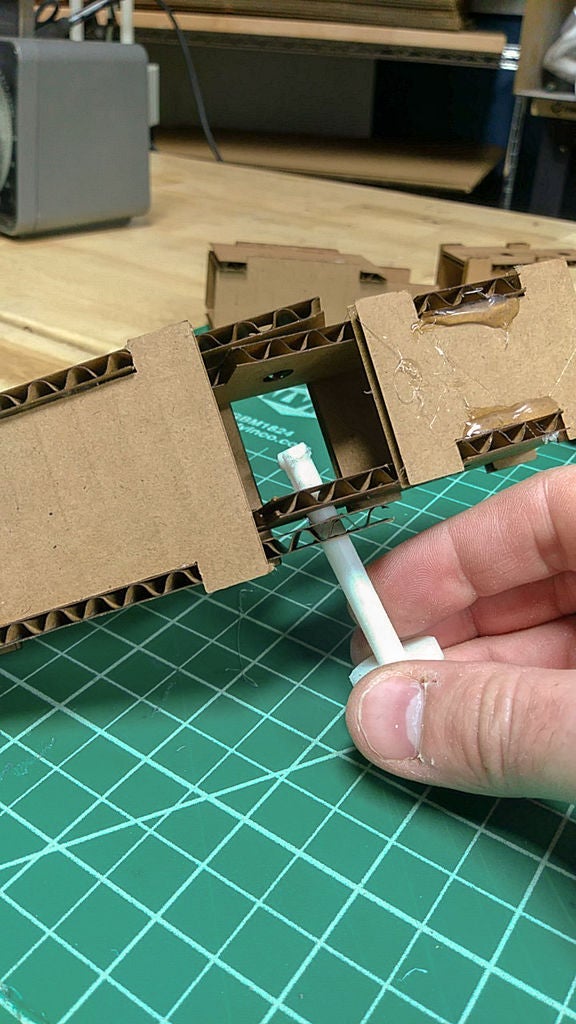
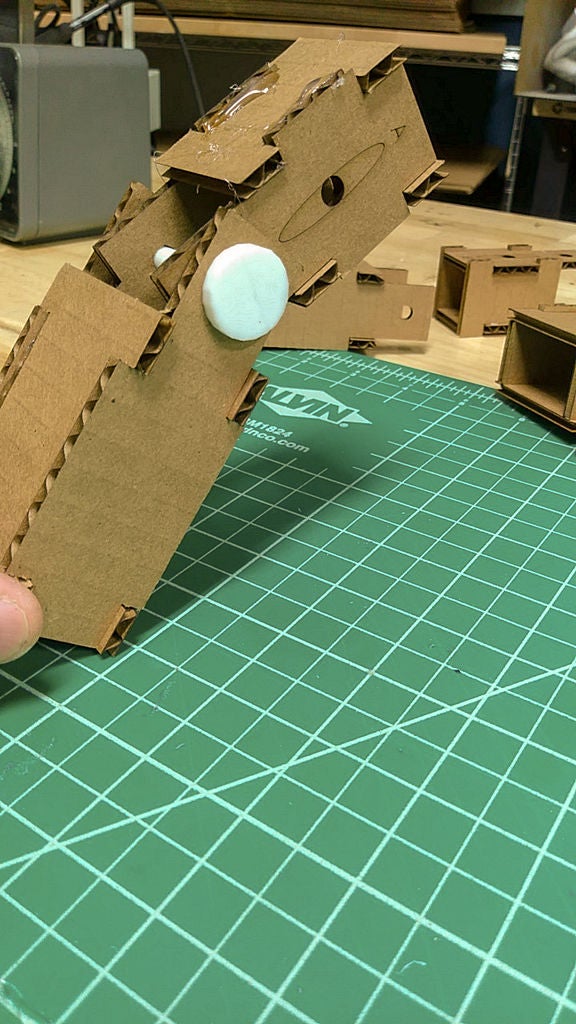
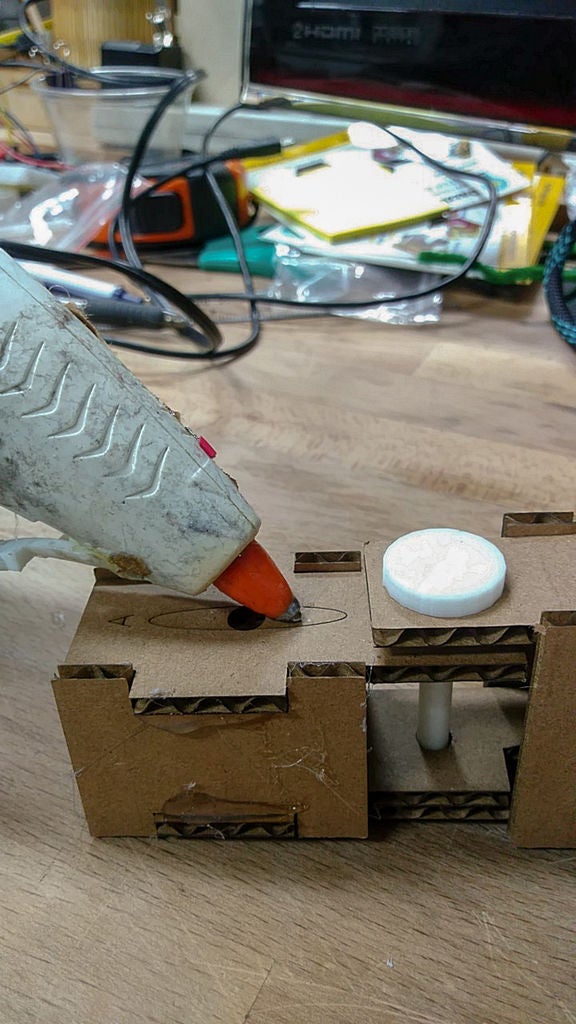
步骤7:附加腿
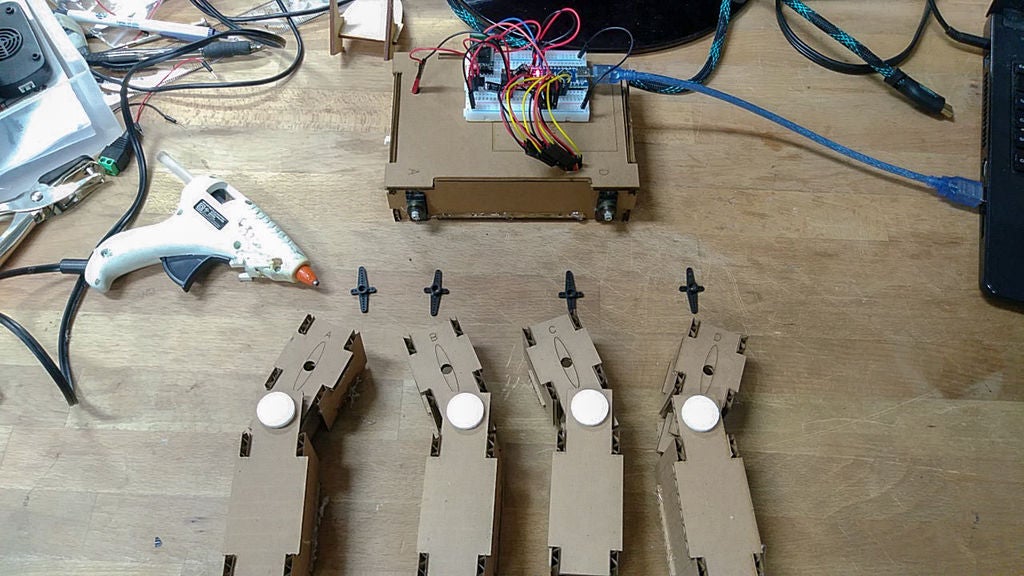




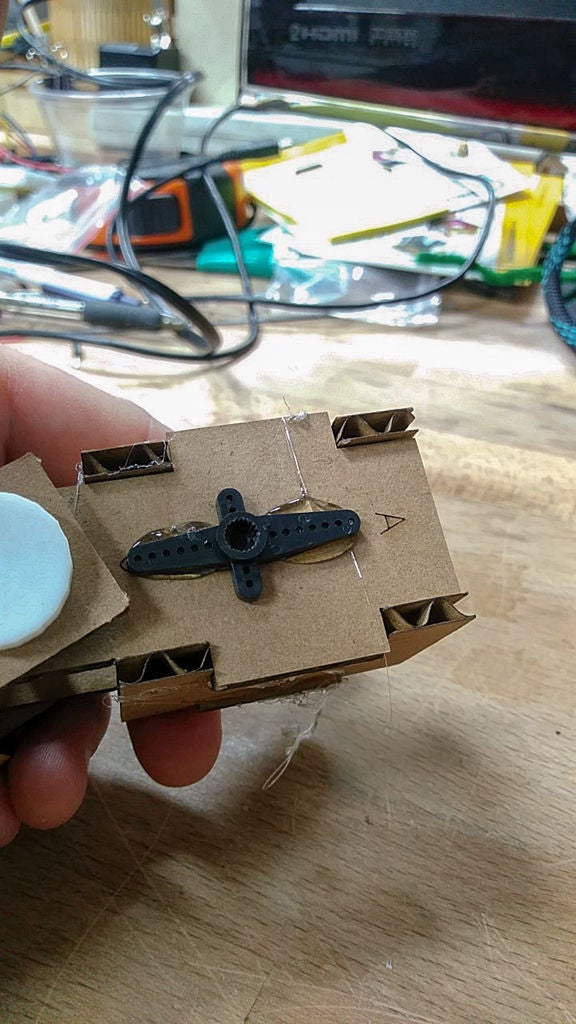







Homestretch!现在我们将把伺服喇叭添加到腿部,这样我们就可以将它们连接到我们的机器人上。
1。抓住四条腿和四个伺服喇叭。
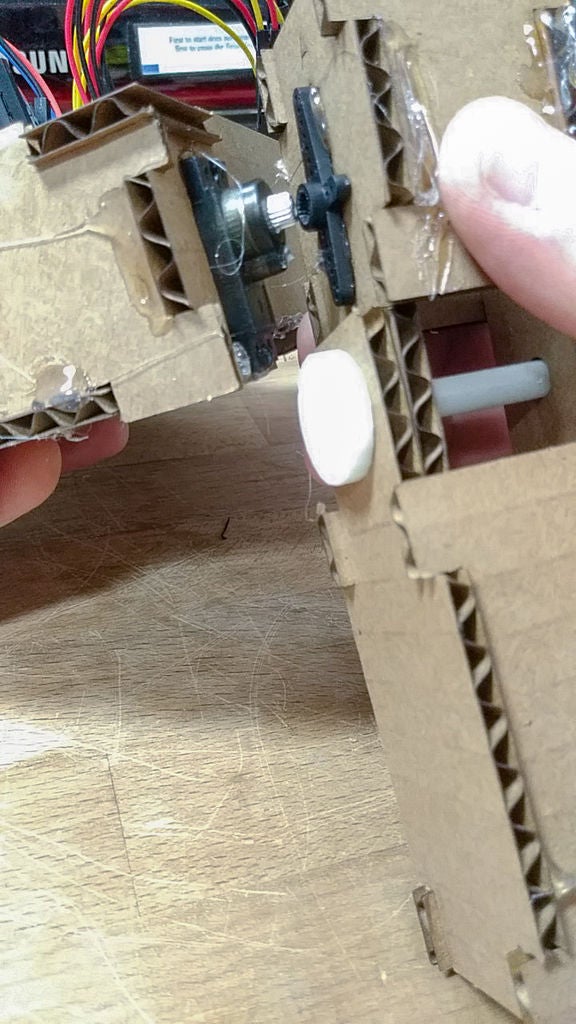
2。注意角。很难看到,但一方比另一方长。如果计算孔数,你会发现一方有7个,另一方有6个。你使用哪一方并不重要,但你必须保持一致。如果您粘贴喇叭使得有7个孔的一侧位于顶部,请为每条腿执行此操作。否则,你的机器人将不会坐在水平,因为一条腿会略高于另一条腿。
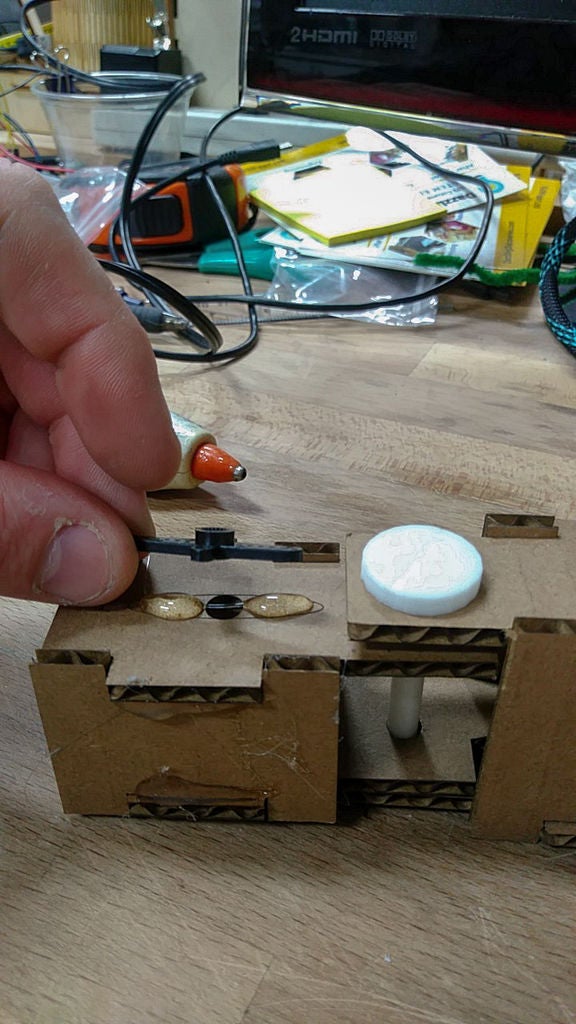
3。从腿A开始,在椭圆形内侧添加一排胶水。
4。轻轻地将喇叭按入胶水,使其在椭圆形内部。尝试将喇叭孔与椭圆形中心孔对齐。
5。每条腿重复步骤4.
6。现在只需将每条腿连接到每个伺服器上。 A到伺服A,B到伺服B,C到伺服C,D到伺服D.这将有助于查看车身顶部的标签。
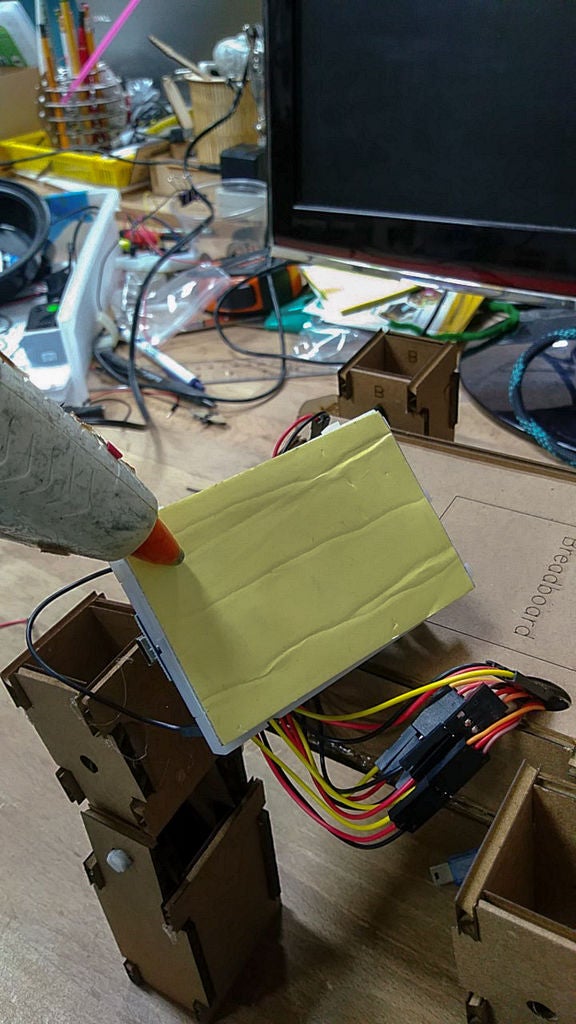
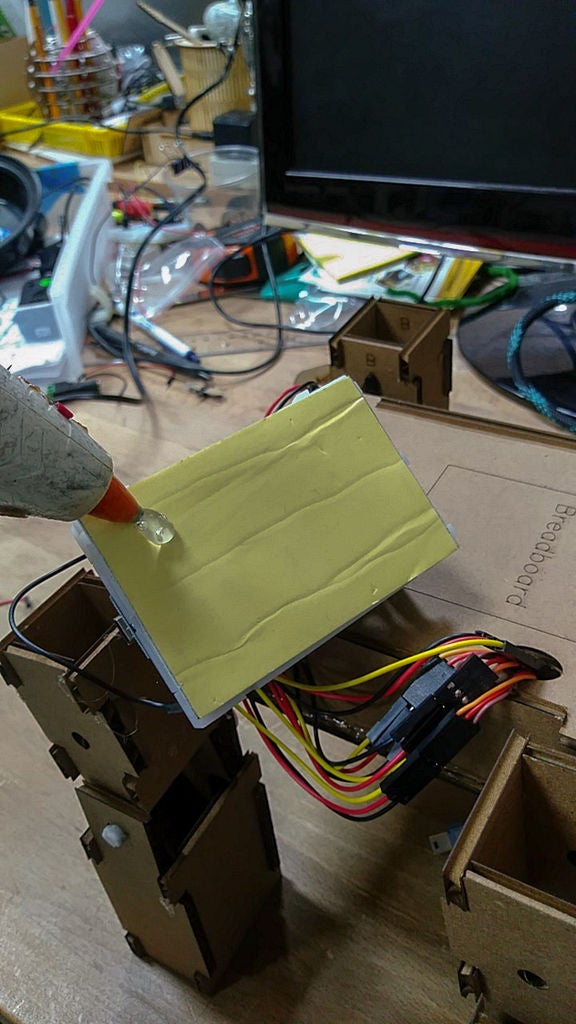
7。用少量胶水将面包板固定到位。
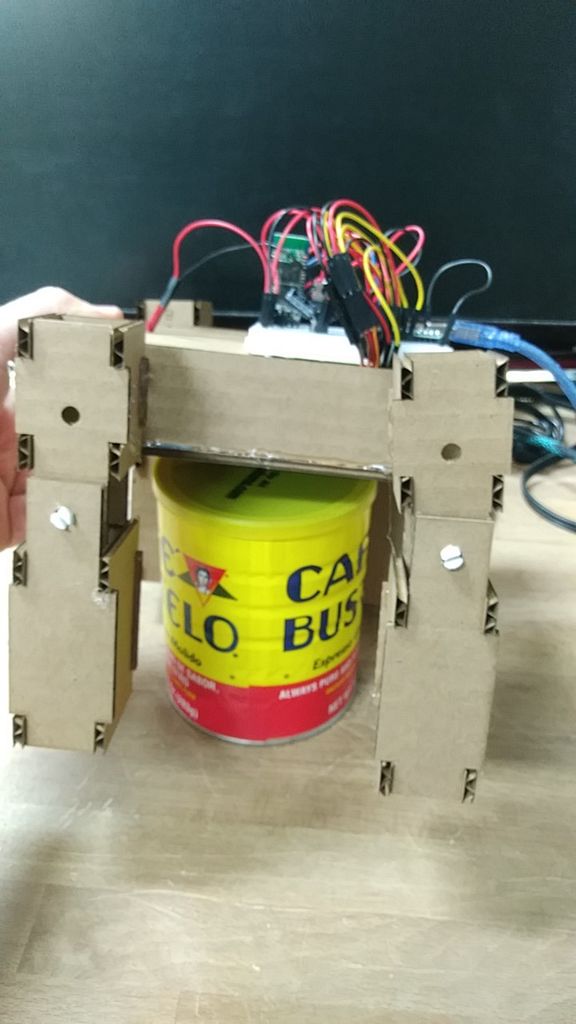
8。出于测试目的,我发现有一些东西可以让机器人停下来。咖啡可以很好用。
为了更好地将支腿固定在伺服系统上,请使用伺服系统随附的喇叭安装螺丝。拿一把小十字头螺丝刀,将螺丝穿过支腿的孔插入伺服喇叭的孔中。磁化螺丝刀最适合这种情况。没有吗?好好抓住磁铁,将螺丝刀的尖端从磁铁上移开,就像你正在磨刀一样。在大约10-20次通过后,尖端将具有足够强的磁场,以便在将其引导到位时将螺钉固定到位。
步骤8:测试代码
现在是时候测试代码了。如果在添加腿时拔下Arduino,请将其重新插入并再次上传代码。
默认情况下,机器人设置为接收串行输入。打开串行监视器并键入1,然后按Enter键。 DoggoBot应该开始走路了。在串口窗口中输入2将使机器人坐下。 0会使它成立。
接下来我们可以测试蓝牙部分。我创建了一个控制机器人的应用程序但不幸的是我无法将其上传到Google Play商店。您必须手动安装它,但不要担心,这是一个简单的过程。
1。将基于Android的手机插入电脑。
2。确保您已将其设置为可以在计算机和手机之间传输文件。
3。打开DoggoBot Files文件夹并导航到MIT App Inventor文件。
4。有一个名为BlueController.apk的文件。
5。将此文件复制到手机上。
6。在手机上,导航到放置BlueController.apk文件的位置,然后单击安装。
7。您可能需要调整手机设置以允许安装不是来自Google Play商店的应用。
8。或者,您可以为MIT App Inventor创建一个帐户。我强烈推荐这是一个有趣的工具。
9。设置好帐户后,将BlueController.aia文件导入您的app inventor项目。
10。选择使用QR代码构建应用程序的选项。
11。使用手机QR码扫描仪扫描应用程序提供的代码。
12。它将引导您到下载应用程序的链接。
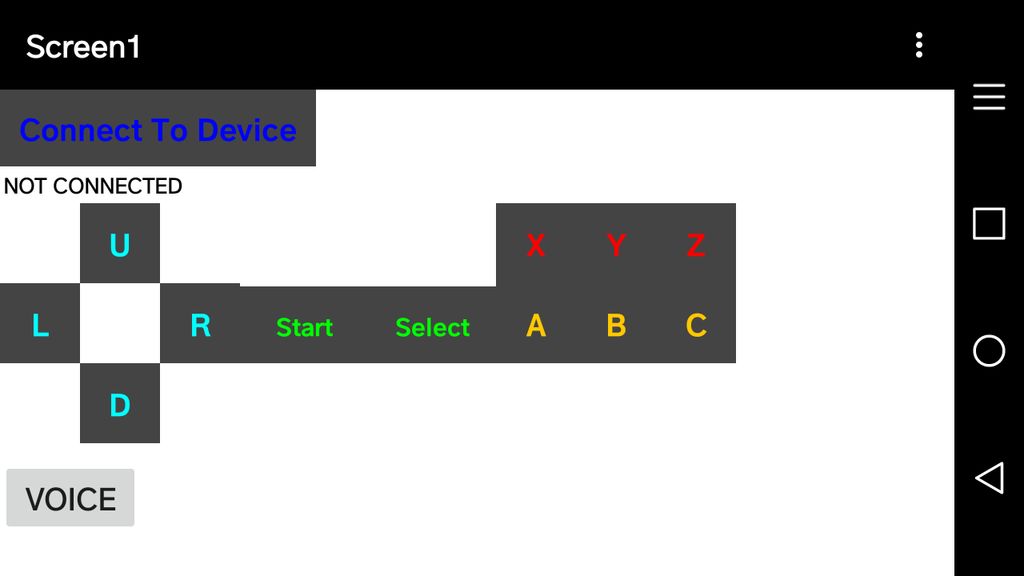
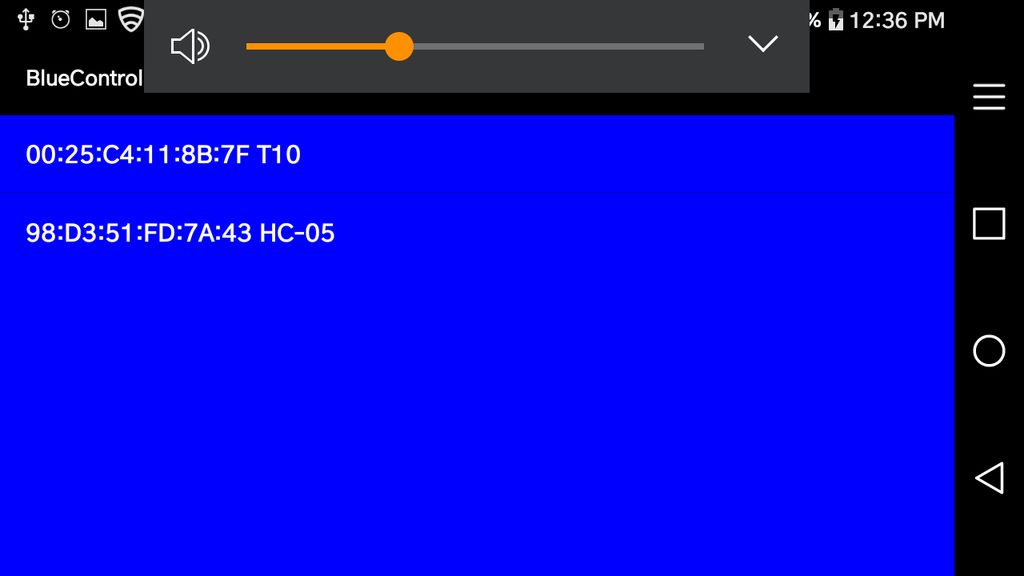
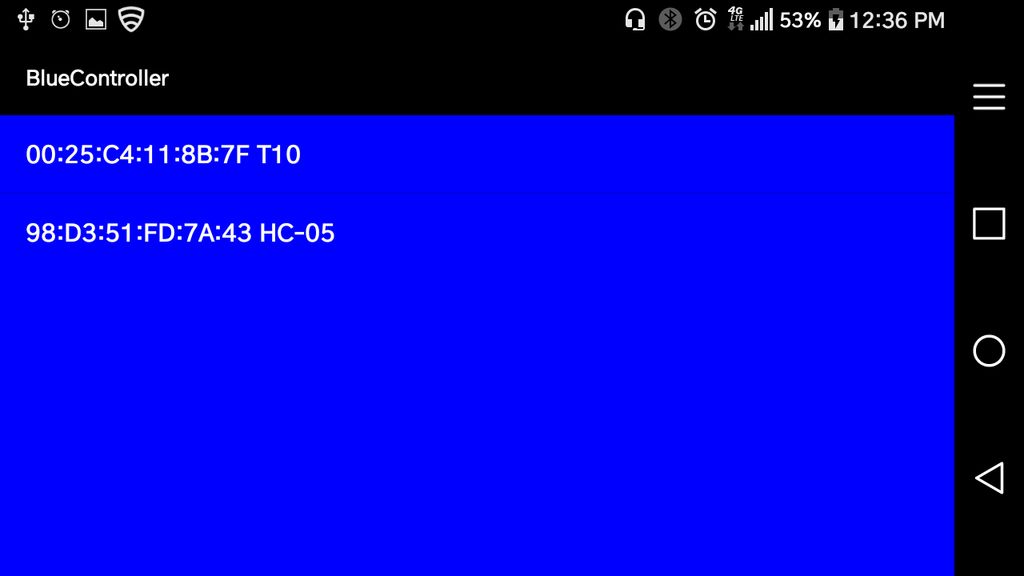
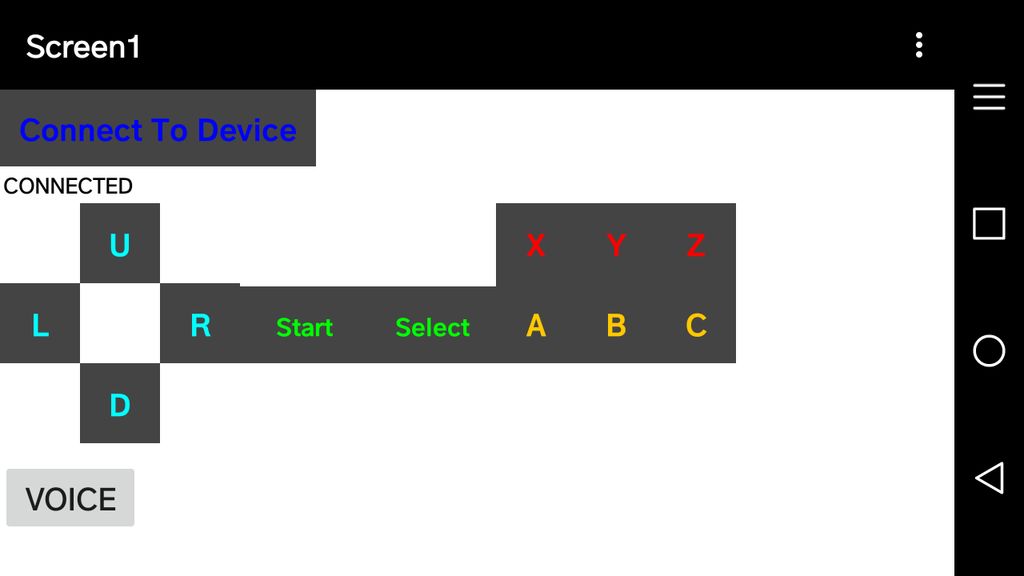
13。安装。这里的照片是应用程序在手机上的样子截图。
以下是应用按钮发送给Arduino的值:
UP =‘你’左下=‘d’左下=‘l’
RIGHT =‘r’
A =‘a’
B =‘b’
C =‘c’
X =‘x’左Y = ‘y’
Z =‘z’
START =‘s’
SELECT =‘t’
语音命令只发送一个字符串。
您可能需要调整Arduino代码中的一些设置。如果机器人坐不好,请调整sit()函数中的pos变量,使其正常放置。使用这些变量,直到找到有效的变量。
对walkForward()函数执行相同操作。您可能需要调整开始和结束位置的值以使DoggoBot正确行走。玩这些!机器人背后的想法是有一些可以轻松调整的东西,试试看,让我知道它是如何工作的!
第9步:最后的步骤






应用程序的语音识别部分很好但不是很好。您可能必须调整Arduino代码中的一些if语句,以解释语音识别器误解的单词。例如,我发现“sit”经常被打断为“set”。只需将此条件添加到blueControl()中的info语句即可解决此问题。
使用Arduino代码中的printAll()函数查看应用程序发送的内容,以帮助您调整代码。
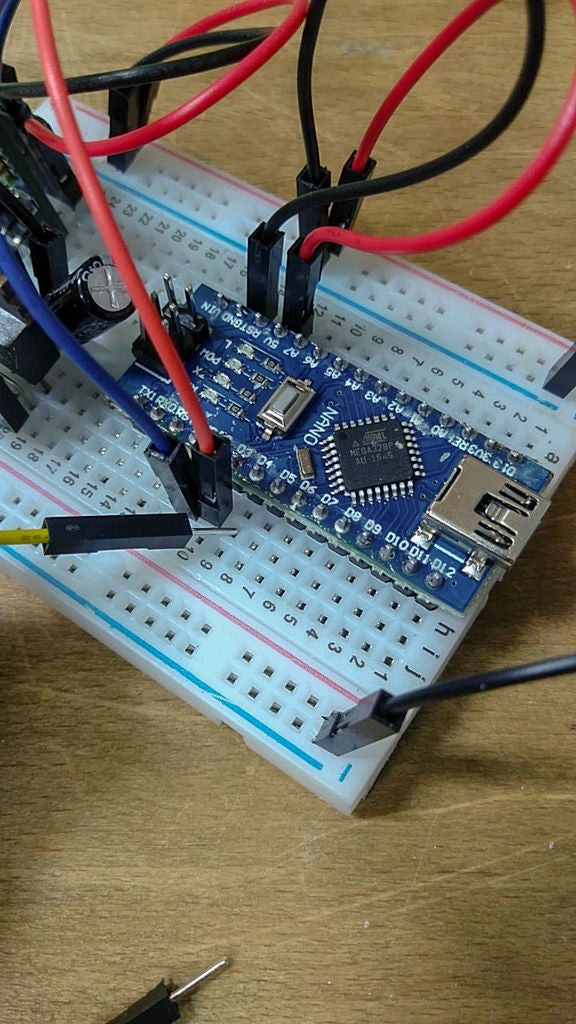
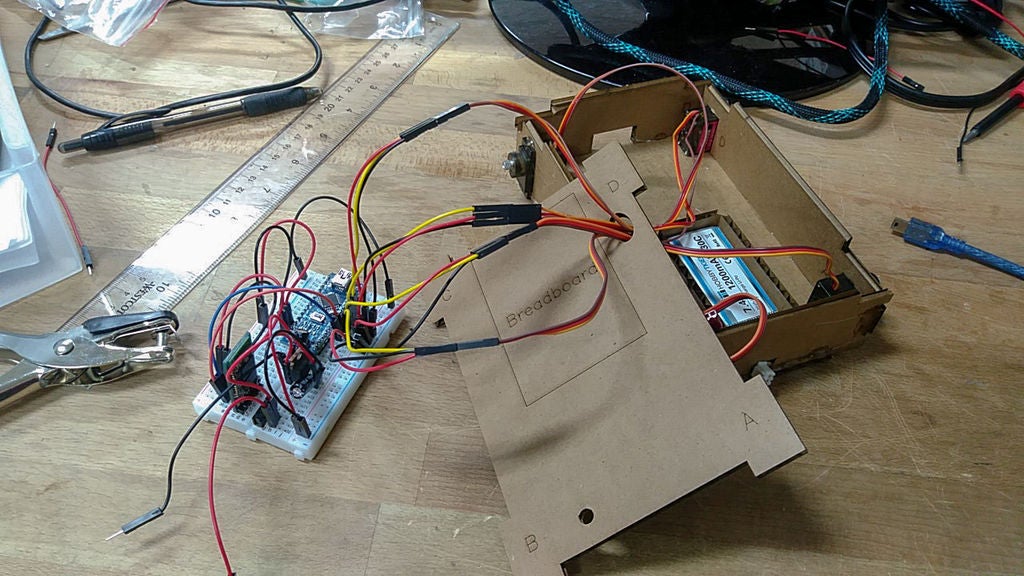
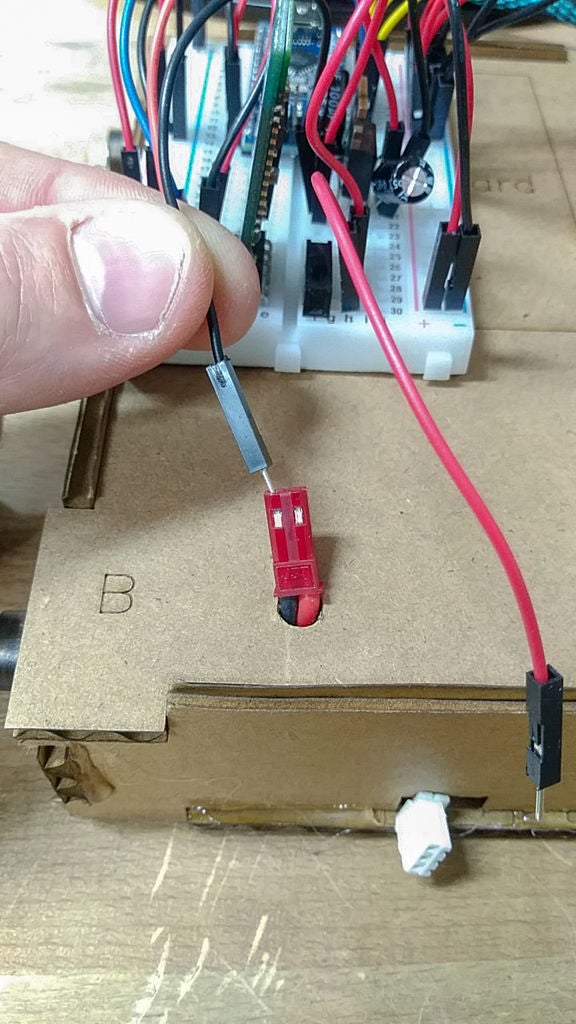
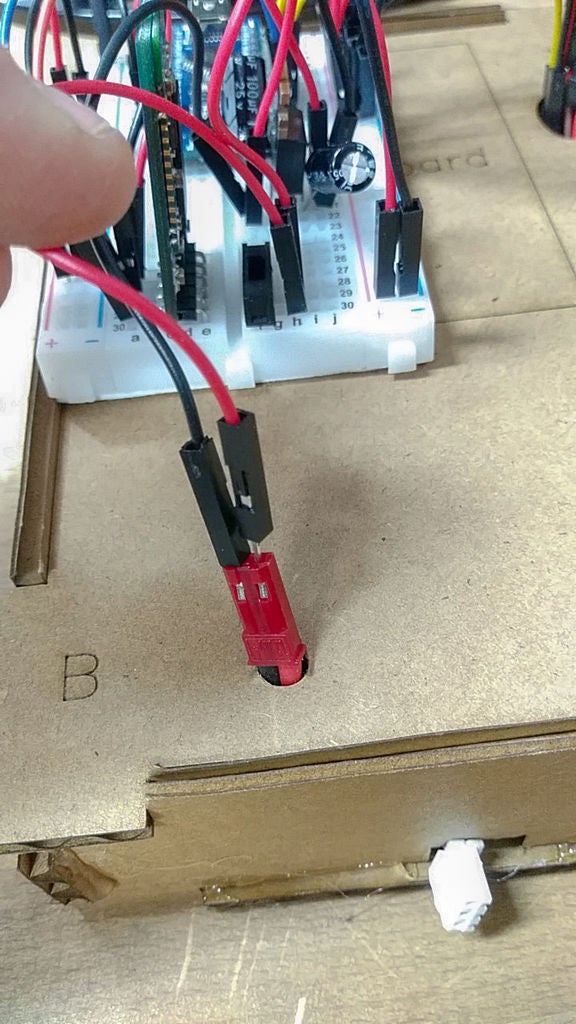
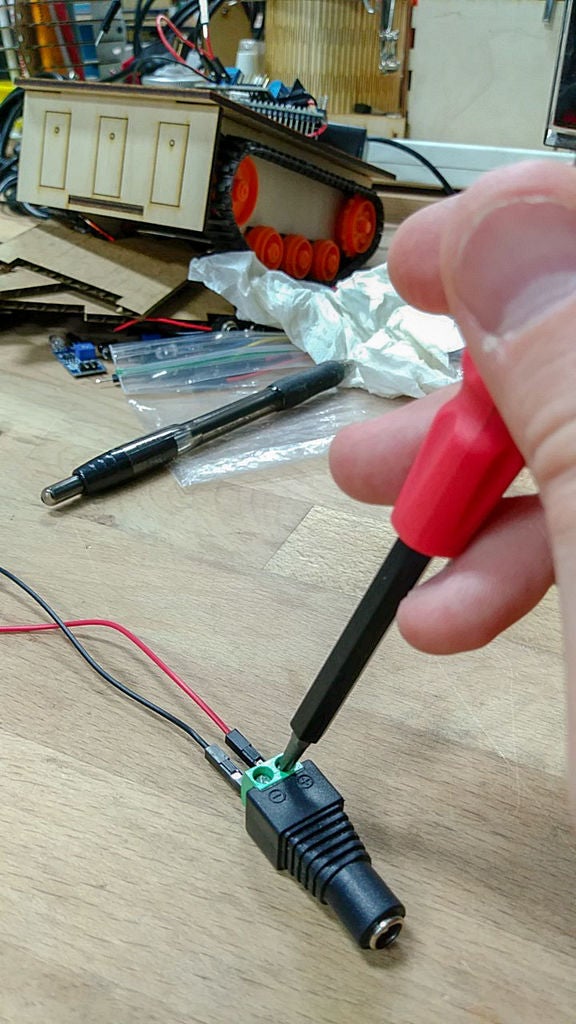
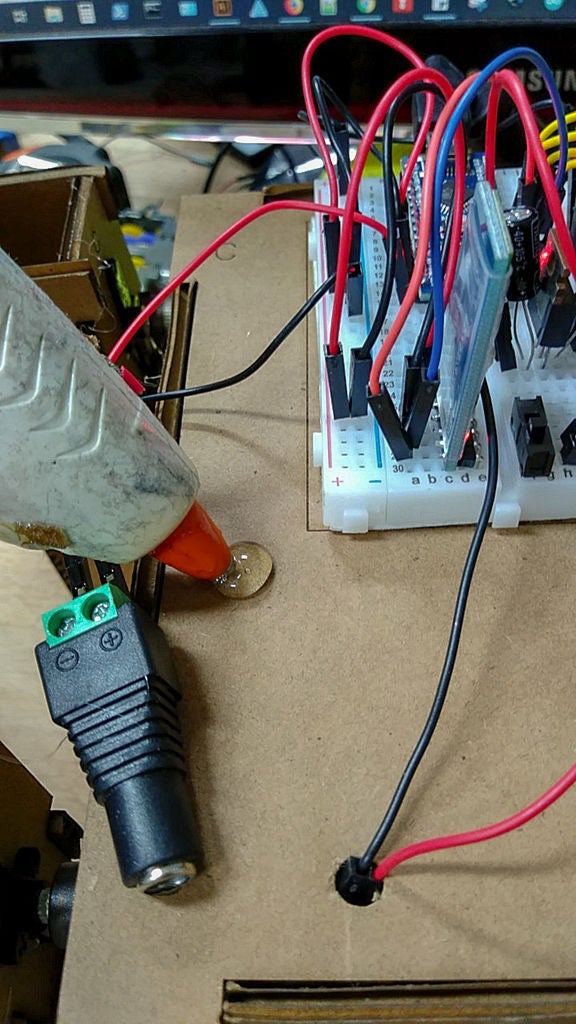
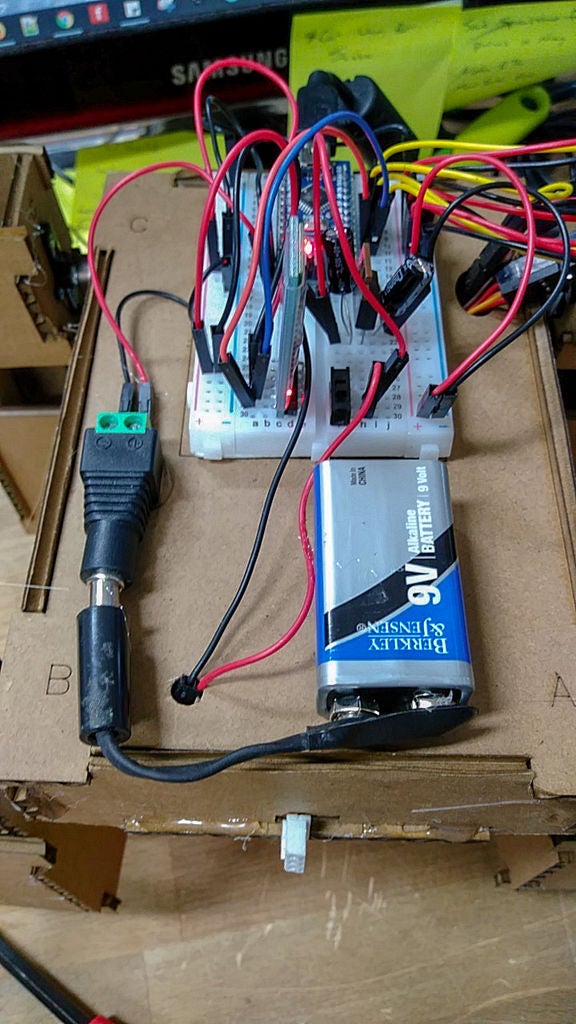
我要做的最后一步是添加一个9伏电池,以便为Arduino Nano供电,而不是使用USB电源。有几种方法可以做到这一点,但基本上你需要将9伏的正极连接到Nano的Vin引脚,将电池的负极连接到Nano的GND引脚。
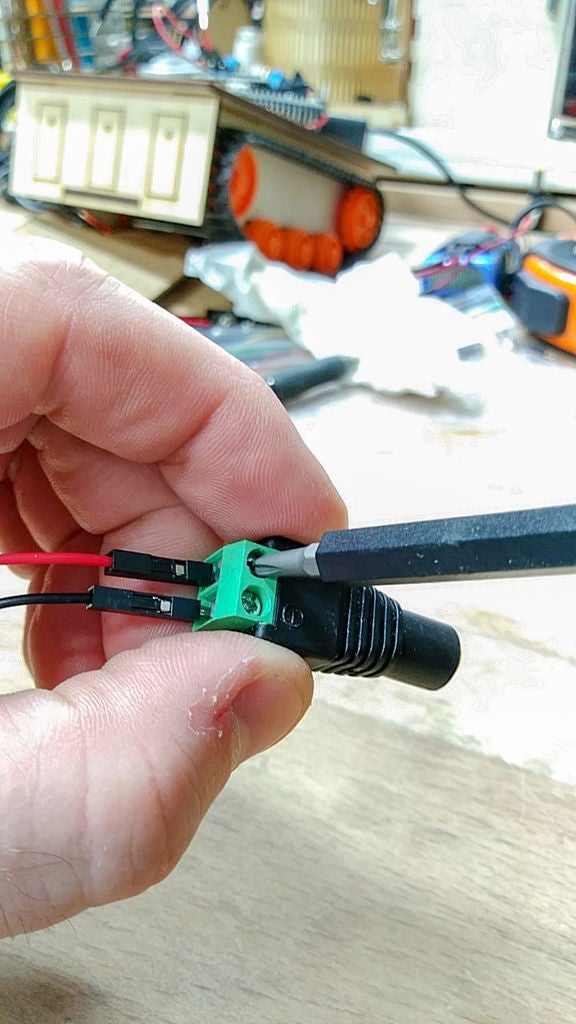
以下是我的表现。我使用了一个桶式千斤顶和一个桶式插孔适配器,因此我可以在不使用时拔掉电池。
1。将红色跨接线连接到DC桶式插孔适配器的正极端子。
2。将黑色跨接线连接到DC桶式插孔适配器的负极端子。
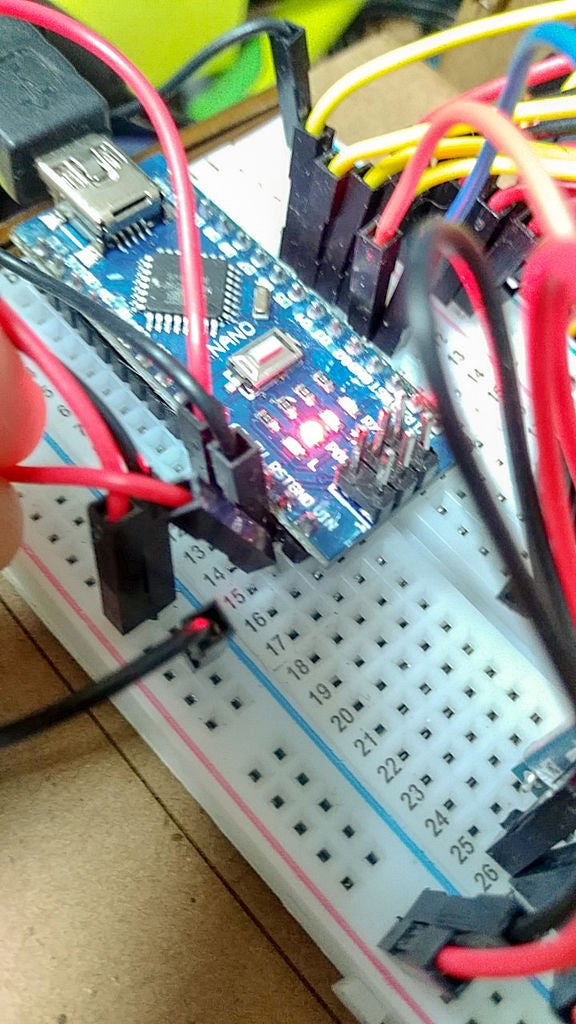
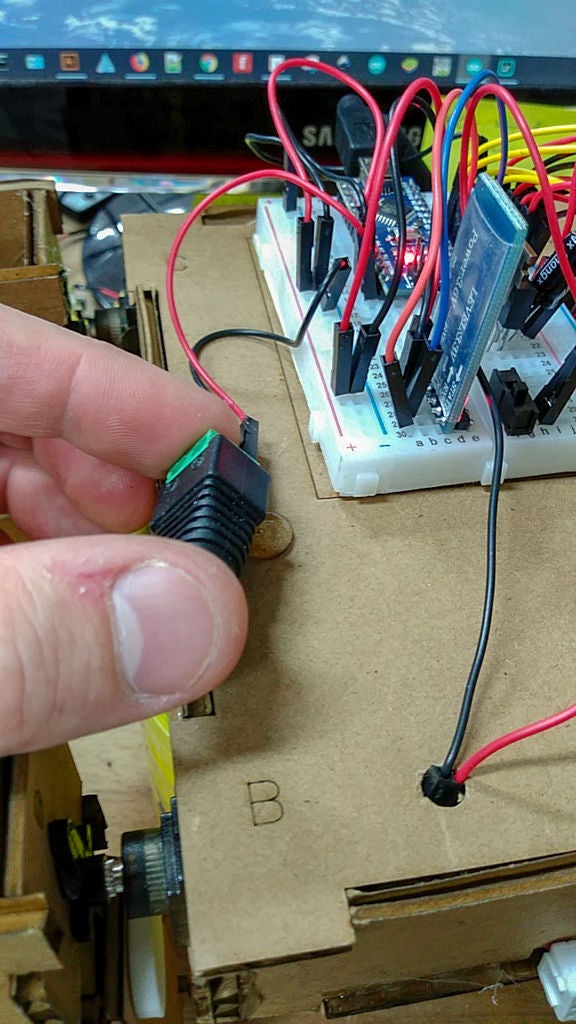
3。将红色跨接线的自由端连接到面包板上的Nano‘s Vin针脚。
4。将黑色跨接线的自由端连接到面包板上的地线。
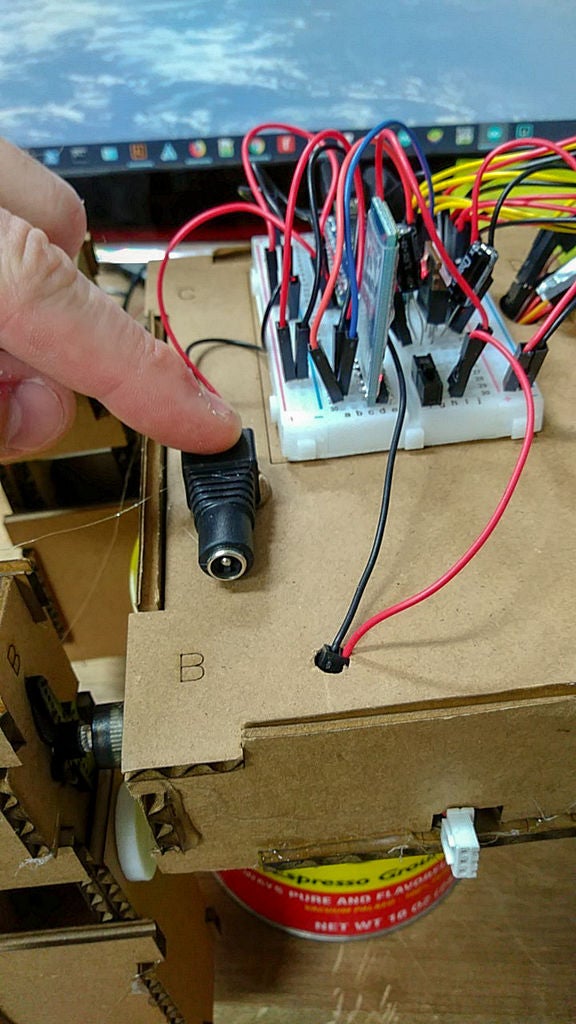
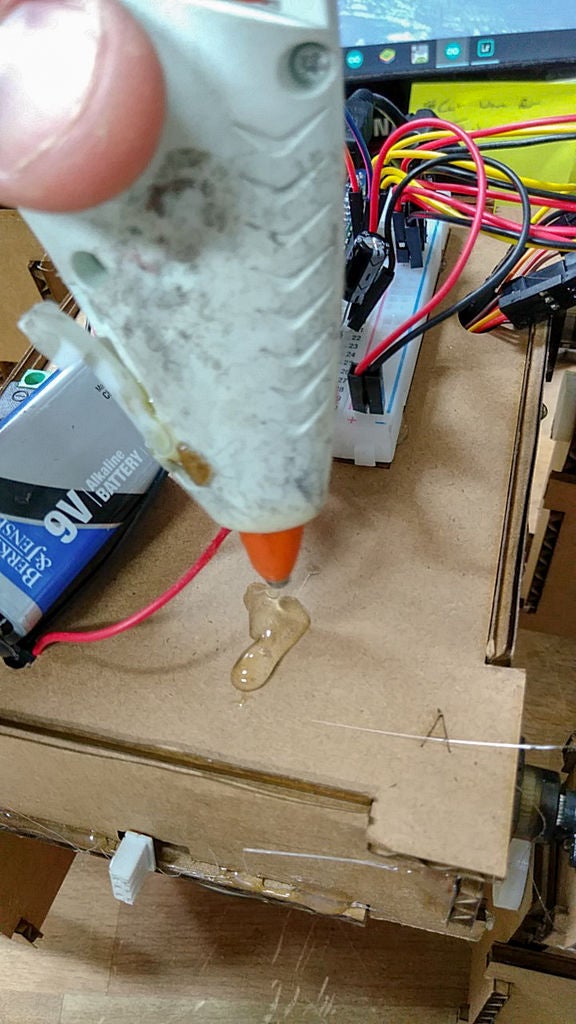
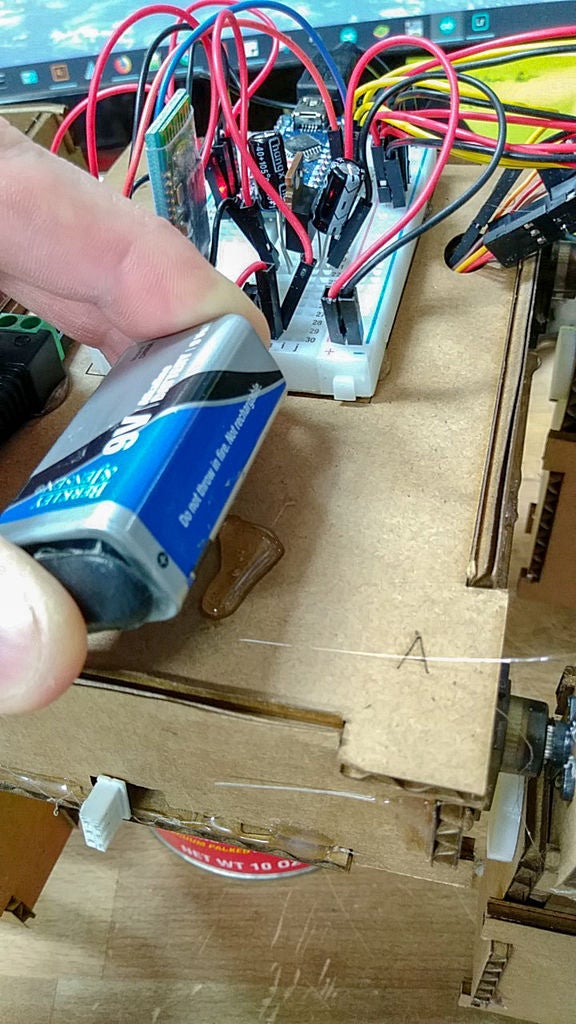
5。使用一点热胶将枪管插孔适配器固定在机器人上。
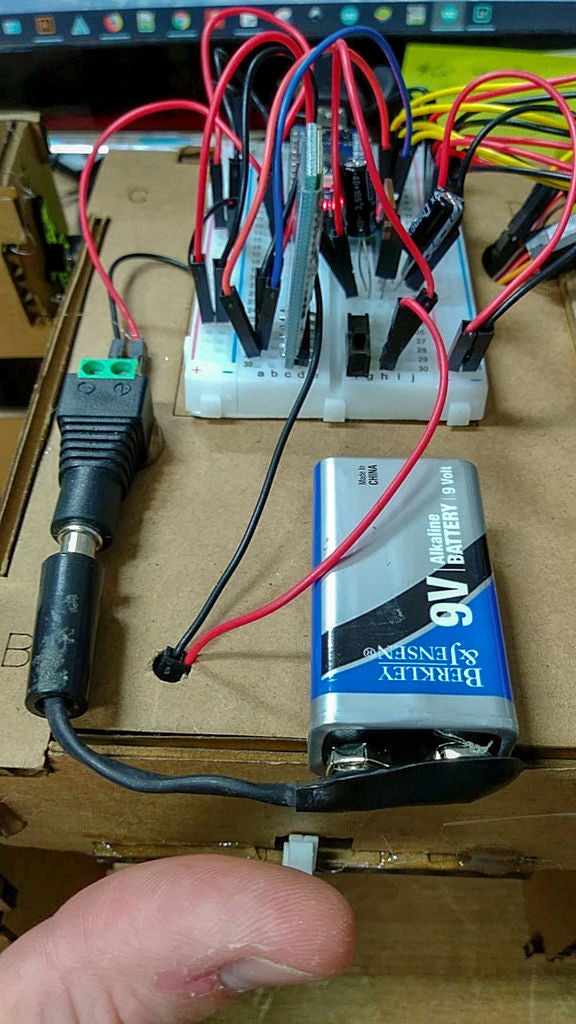
6。将9伏桶形插孔适配器连接到9伏电池。
7。确保你有足够的空间插上和拔出枪管插孔,然后用一点热胶将9伏固定到位。
第10步:最后的想法
这个项目是几个月的故障排除和试验的结果,因为这是我第一个使用Arduino的大项目。最后,我对它的出现非常满意。我肯定想添加更多,目前正在使用版本2.我希望为机器人添加更多功能,例如车削和物体检测。
-
 Katie老师
2021-03-17
0 回复 举报你好,激光切割的文件可以发我吗? 收起回复
Katie老师
2021-03-17
0 回复 举报你好,激光切割的文件可以发我吗? 收起回复
- 相关推荐
- 热点推荐
- 机器人
-
笔记本组装全过程图解.pdf2010-12-26 15973
-
热转印电路板制作全过程2012-06-24 5904
-
PCB 制作全过程2012-08-05 79009
-
音箱制作全过程2012-08-16 37251
-
有人分享制作蓝牙耳机的全过程吗?2014-06-02 6259
-
菜鸟制作51避障小车全过程记录2015-06-18 74444
-
中夏s66e组装全过程2016-05-12 10348
-
图解感光干膜制作高精度电路板全过程2010-03-31 2261
-
LED生产工艺,led的制作流程全过程!2009-11-13 10381
-
双系统XP、win7 双系统安装全过程图解2010-02-02 5005
-
图解详说proteus7.4安装全过程2011-08-08 1297
-
USB下载器制作全过程及问题解决2017-08-31 1450
-
IGBT制作全过程资料下载2021-04-15 2014
-
手工制作pcb全过程2021-06-19 2654
-
芯片制造全过程2021-12-08 13476
全部0条评论

快来发表一下你的评论吧 !
