

自动喂鱼器的制作
电子说
描述
第1步:准备材料
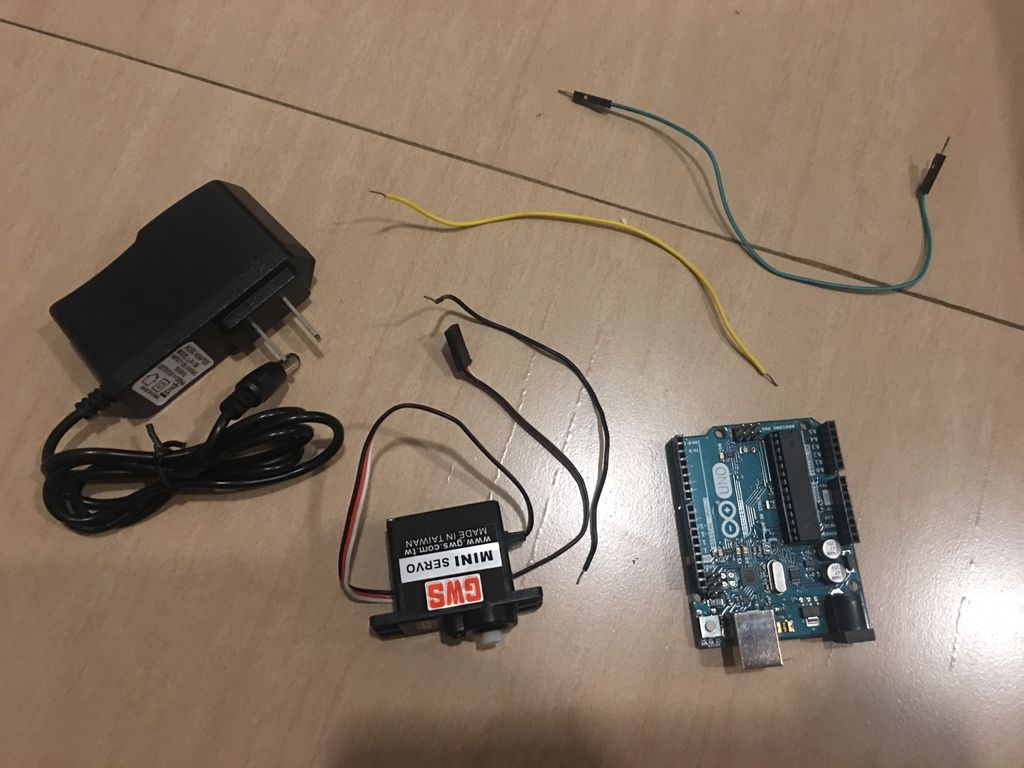
为此项目,您将需要以下材料:
电路:
3根绝缘铜线(22AWG线),长约4-6英寸,两端剥去
AC/DC适配器
GWS小型伺服
双侧伺服臂
伺服螺丝(1.7 x 3mm)
Arduino
USB线A至B
用于构建外壳:
田宫水泥胶
或胶水枪
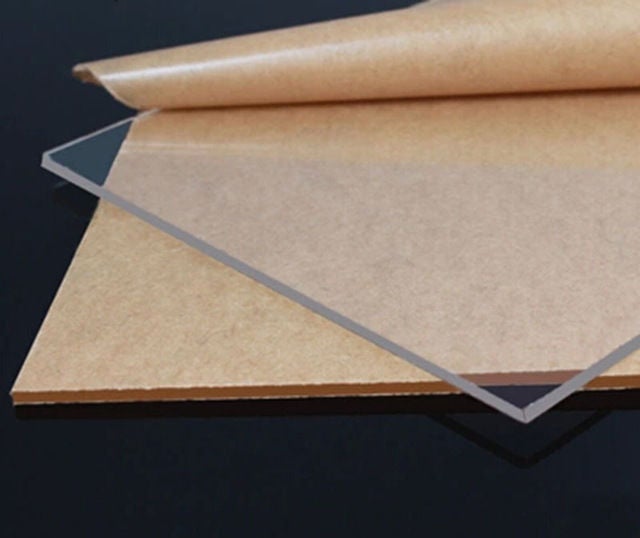
步骤2:激光切割食物储存
首先,您需要激光切割鱼食储存箱或料斗。
将2mm丙烯酸置于激光切割机中,纸张侧面位于底部。确保在切割前校准z轴。
将下面的PDF文件加载到Universal Laser Systems控制面板中,然后将图像重新定位到丙烯酸板上所需的位置。打开设置并转到手动控制。加载2mm丙烯酸树脂的设置,然后应用这些设置。
此文件需要5-10分钟才能完成。
步骤3:激光切割六边形外壳和旋转臂
再次,除了使用这两个文件之外,执行与料斗相同的步骤。
加载这两个PDF文件然后剪切。
总共需要5-10分钟。
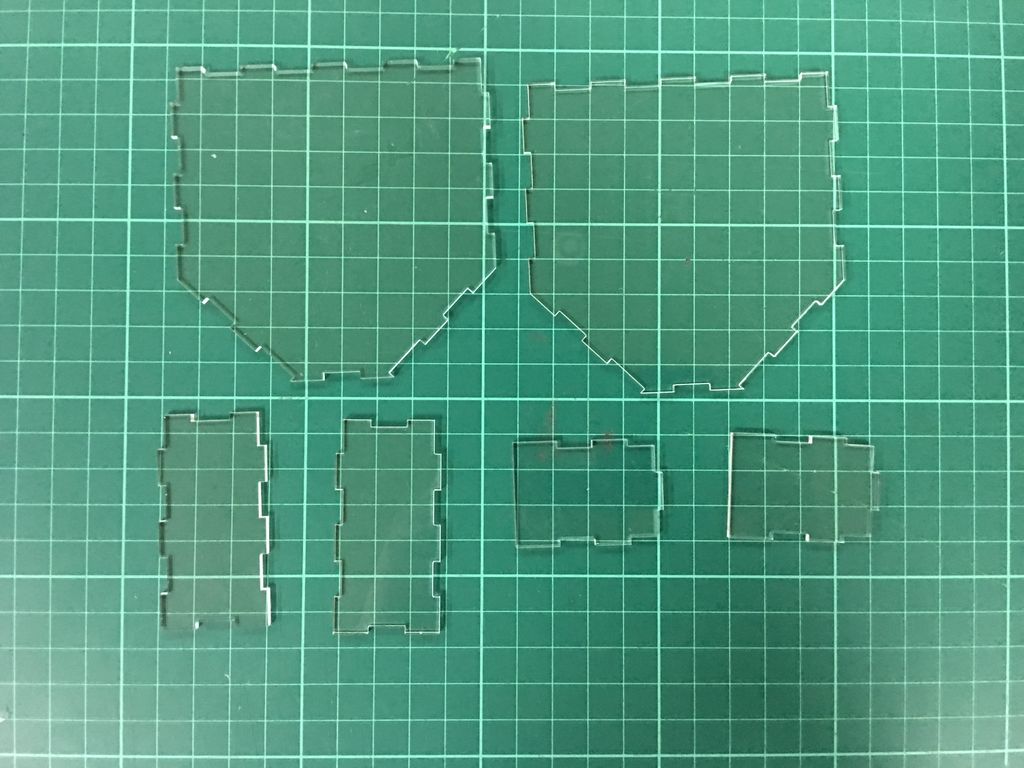
步骤4:激光切割外壳
最后,激光切割外壳。随附的是以下文件:
包含TOP
包含BOTTOM
包含LARGE face(将此文件剪切为两个以最终为两个
包含有洞的侧面
无洞地插入SIDE
名为Encasing FULL的文件只是上面编译的所有上述PDF文件在单页中,当你的丙烯酸板上有足够大的空间来容纳整个设计时。
切割过程需要10-20分钟。
步骤5:组装食品储存
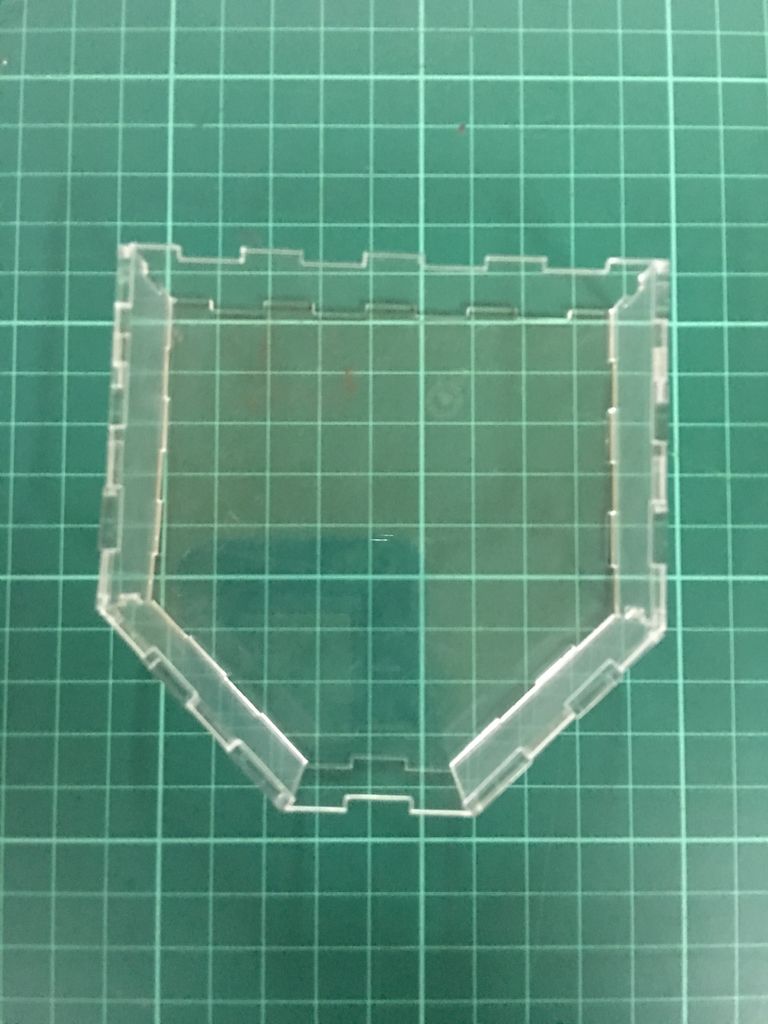
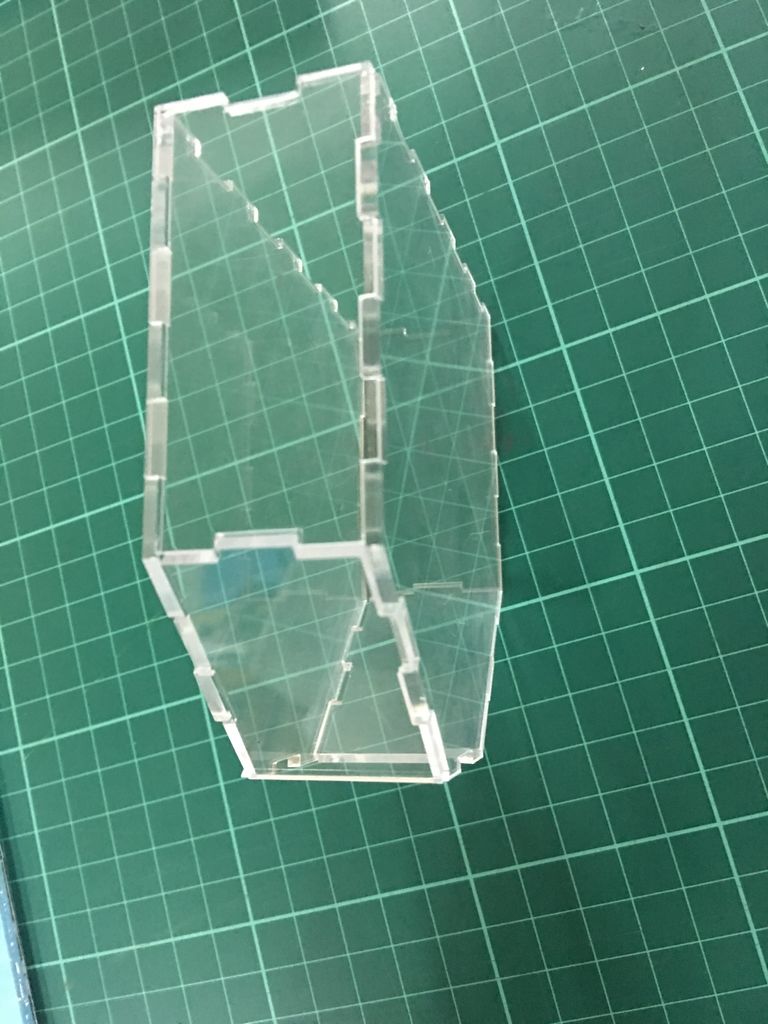
现在,仔细组装食品储存器或料斗。拿你的切割丙烯酸并去除纸背衬。
这种设计是为了摩擦配合,但你可以选择添加一些Tamiya水泥胶或胶枪来加强储存箱。
摩擦配合的一些提示:
取2个相邻的面(我通常从最大的面开始)并将它们的公共边缘首先放在平坦的表面上
慢慢抬起其中一个面,使其倾斜到适当的位置 - 就像弯曲一个面与另一个面形成90度角一样。
要温柔,继续前进,直到你完成整个事情
第6步:组装六边形包装

现在,在组装六边形外壳时也要做同样的事情。开始在具有孔的六边形面上组装零件。现在留下另一个六角形面,因为我们仍然需要将伺服臂和旋转臂连接在六角形外壳内。
步骤7:组装Encasing
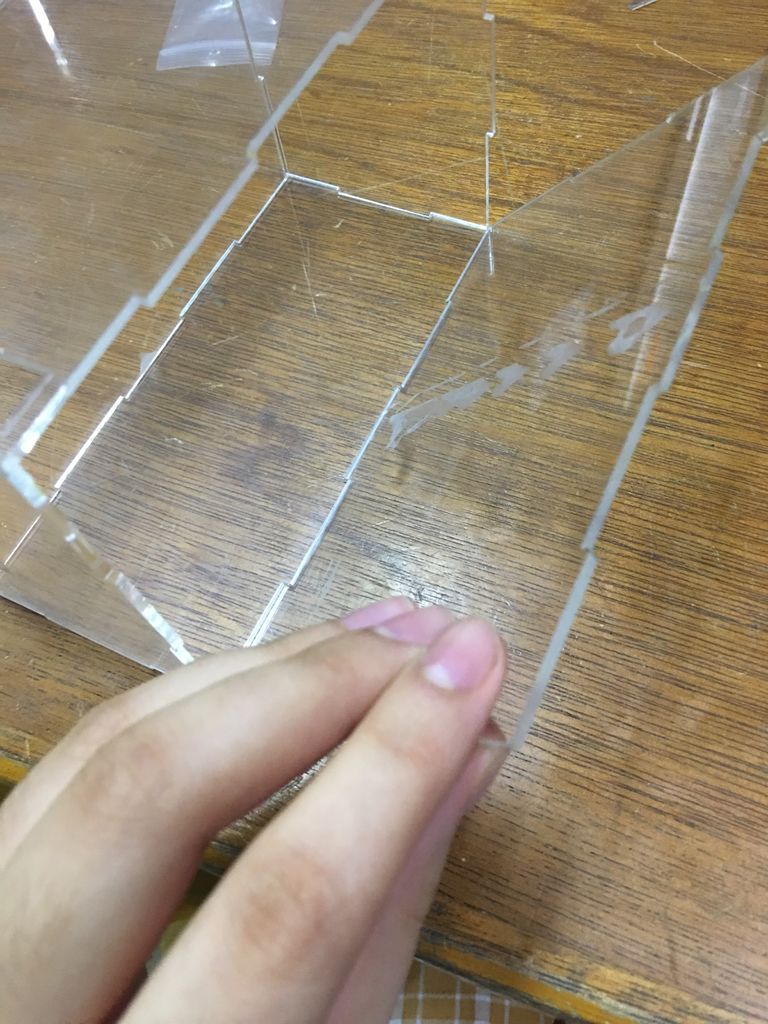
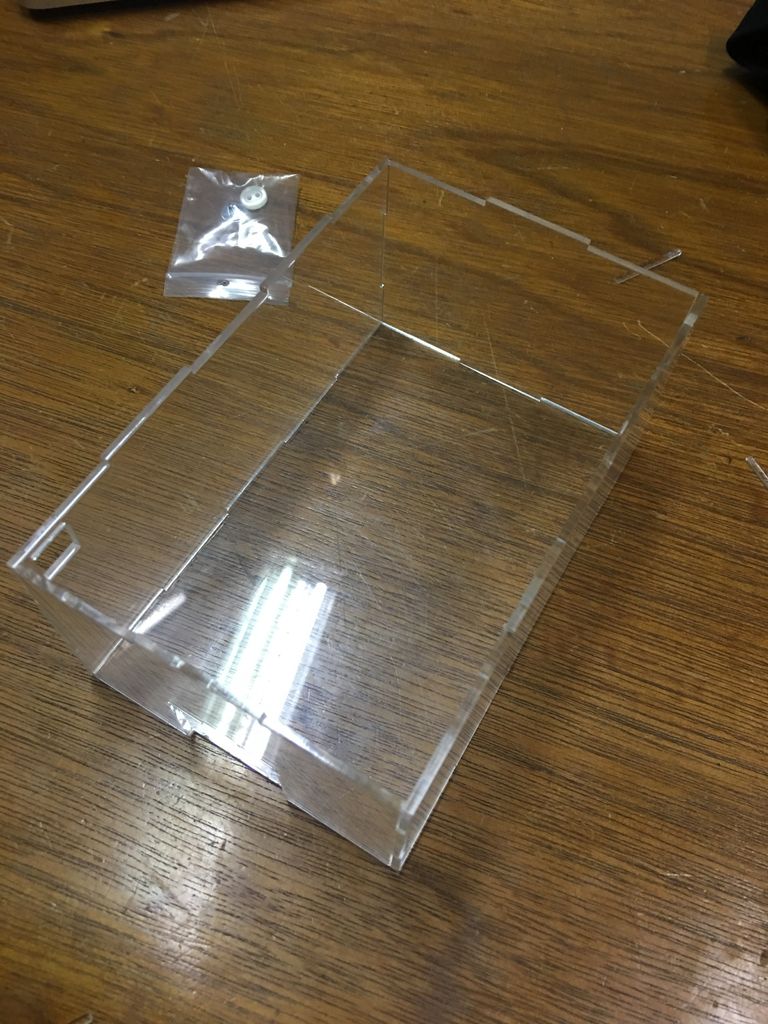
接下来,组装包装。
组装外壳:
确保BOTTOM的孔面向一个大型面附近,并且有孔的侧面的孔更靠近相对的LARGE面。这是因为BOTTOM面的孔应该是食物掉落的地方,并且SIDE WITH HOLE的孔是用于连接到Arduino的电源线
不要穿上LARGE因为我们还需要一个开口,以便我们安装食物储藏室,六角形外壳和电路。
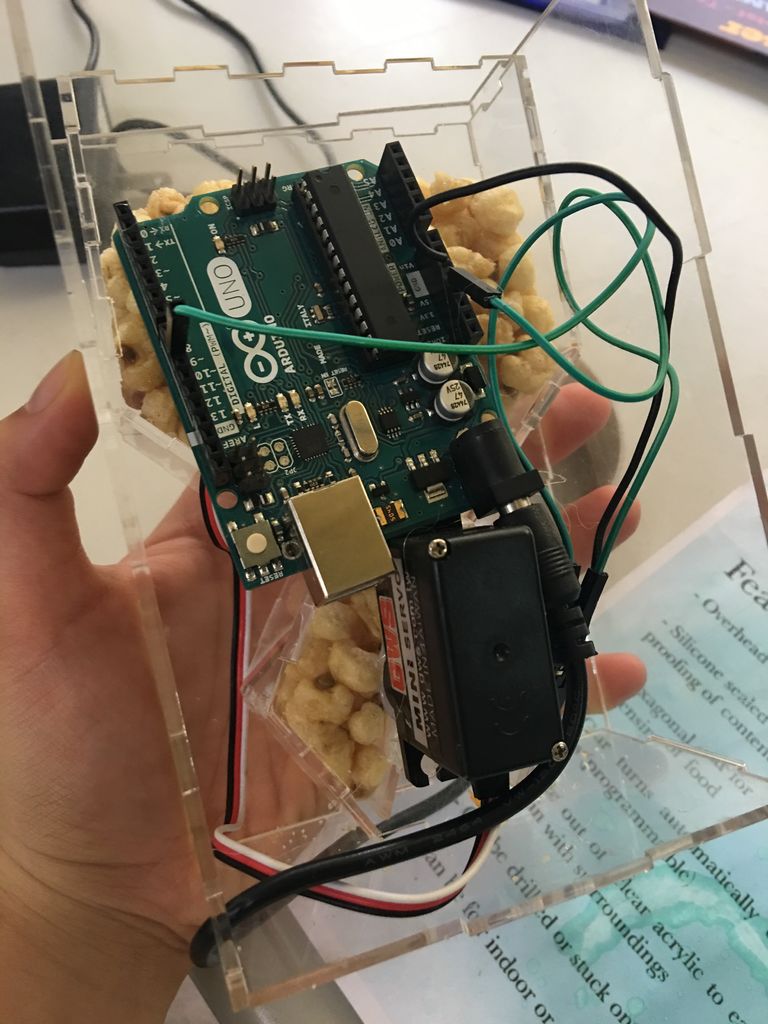
步骤8:构建电路
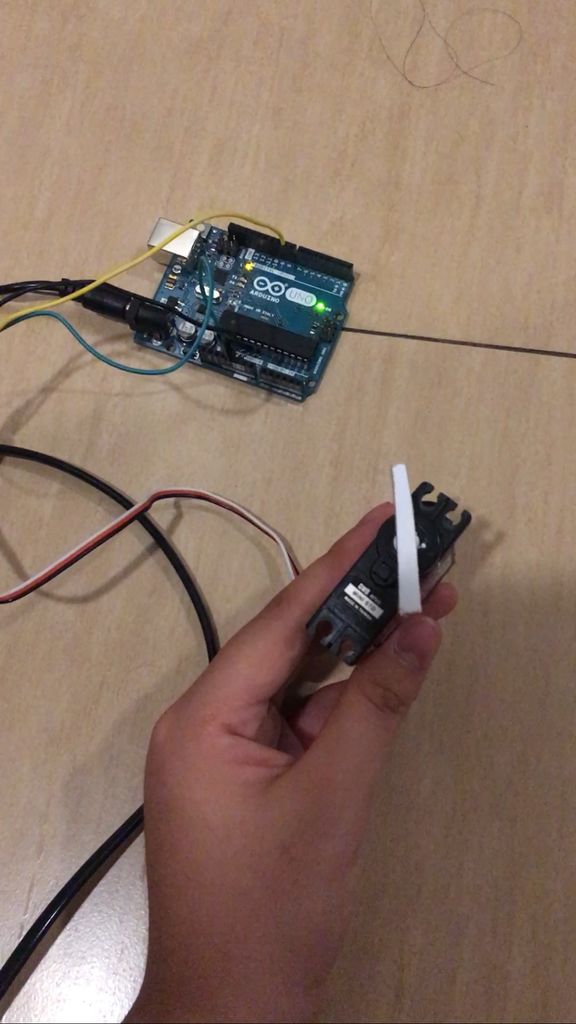
要构建电路,需要执行以下操作
获取一根电线(两端剥去)并将一端插入Arduino上的GND端口。这代表着地面。
将此电线的另一端插入伺服黑色电线的母端。
获取另一根电线并将一端插入说明5V的端口Arduino。
取下电线的另一端,插入伺服电机红线的母端。
最后,换另一根电线,将一端插入第9针。在Arduino上。
取下电线的另一端,将其插入伺服电机白线的母端。
接下来,确保已安装Arduino IDE。这将允许您创建和上传程序到您的Arduino。
将SweepDos.ino上传到您的Arduino。您可以根据完成旋转臂的需要将度数从90更改为60。您也可以根据需要更改轮换之间的延迟时间。
您现在可以断开Arduino与计算机的连接。您现在可以插拔然后将AC/DC适配器连接到电路板以测试电路。
步骤9:构建旋转机制

将您的伺服器粘合或粘合在六角形外壳的背面。确保伺服的输出轴或花键进入六角形外壳中间的孔内。
接下来,拿起伺服臂并将其放在输出轴的顶部。带有凹槽内边缘的中心孔应朝向轴线朝下。拿起螺丝,将其放入伺服臂的中心孔。由于输出轴由柔软材料制成,因此通过螺纹将其拧紧到位。调整旋转臂的角度,使其处于附加照片中的位置。
在伺服臂上涂上或涂上丙烯酸旋转臂的设计。
相应地测试和调整手臂。
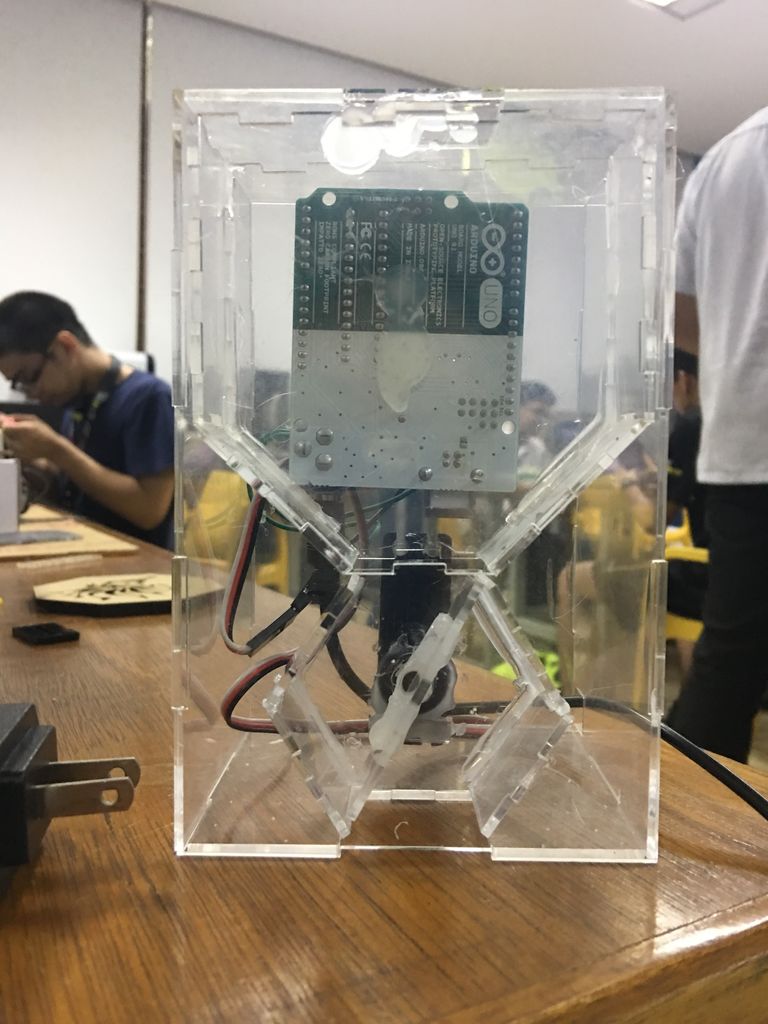
步骤10:组装所有模块
最后,将所有部件放在一起。
插入六边形的底部插槽,包住较大外壳底面的孔。
接下来,放置食物储存器并用六边形外壳将其插入到位。
将Arduino粘在或粘在食物储存的背面。
将AC/DC适配器的电缆穿过较大外壳侧面的小孔并连接到了Arduino板。
完全组装你的大包装的所有部分。
第11步:你做完了!
耶!你已经完成了鱼饲养器的建造!
现在,你可以在里面放一些轻量食物喂鱼
或者一些玉米棒,这样它就变成了自动Alicia给料机。
- 相关推荐
- 热点推荐
- 喂食器
-
如何用Arduino制作一个简易自动喂鱼器2024-03-28 13556
-
[DIY作品秀]飞思卡尔 MC9S12DG128自动喂鱼机2012-03-05 7893
-
学妹都喜欢这样的学长-DIY自动喂鱼装置2012-12-20 6681
-
自动金鱼喂鱼器2016-06-24 17252
-
基于单片机的鱼缸自动控制系统设计与制作2021-11-18 1338
-
水箱自动上水控制器电路及制作2009-04-14 5639
-
怎样制作自动喂鱼器2019-11-06 16240
-
喂鱼器的制作教程2019-09-20 10756
-
创意设计:带自动喂鱼的鱼缸自动控制系统设计与制作 单片机程序 原理图 源代码2021-11-11 879
-
池塘自动喂鱼装置开源分享2022-11-07 632
-
物联网水族馆喂鱼器开源2022-11-17 944
-
基于Arduino UNO的喂鱼器2022-12-23 730
-
使用ESP8266 WiFi模块DIY自动智能喂鱼器2022-12-27 1225
-
制作自动传感器门2023-02-08 596
-
智能喂鱼器制作说明2023-02-11 2806
全部0条评论

快来发表一下你的评论吧 !
