

怎样制作手套控制的机械臂
电子说
描述
第1步:材料清单
3~10k电阻
3-柔性传感器电阻
3-舵机
面包板
Arduino Uno
电线
拉链
4-3-D打印件
我附上了我使用的确切材料的链接,因此即使您没有从这些确切的链接订购也可以轻松查找
3- 10k电阻器https://www.amazon.com/Projects-25EP51410K0-10K-R.。.
3- flex传感器电阻器https://www.amazon.com/Creatron-Inc-Flex-传感器-4 。..。..
3-伺服器https://www.amazon.com/Hitec-RCD-USA-31422-Standa.。.
Step 2:接线
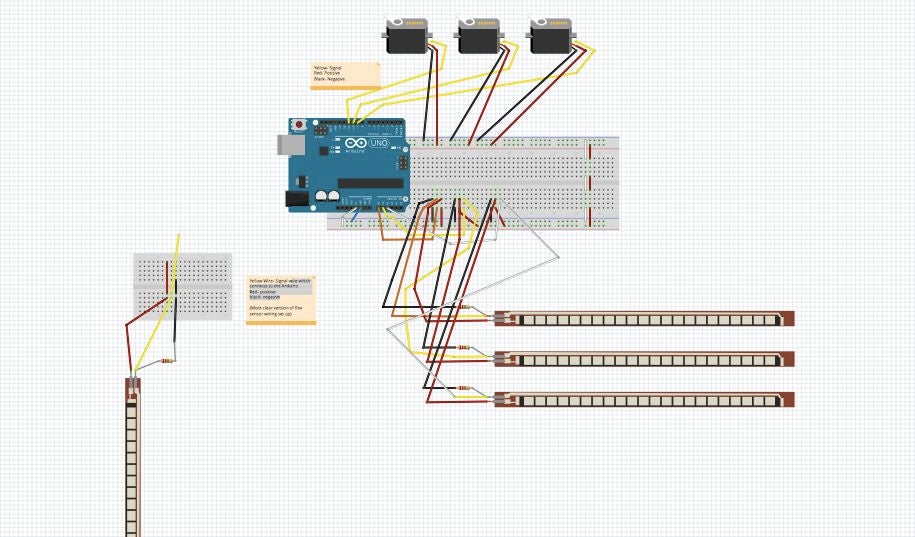
完全按照我设置的布线图像在fritzing文件中。可以在两个不同的部分中最好地查看布线。 1)从面包板和arduino到3-D印刷“臂”的连接2)从面包板和arduino到手套的连接。
3-D印刷臂连接连接到引脚11,10,9以及正区域和负区域的电线连接到3个不同的伺服系统。伺服器上的黑线连接到负区域,即面包板上的负柱。伺服上的红线连接到正区域,即面包板上的正柱。最后黄色信号线连接到arduino。
在我的设置中,引脚9连接到基本伺服并由拇指控制在我的设置中,引脚10连接到顶部伺服并由中指在我的设置中,引脚11连接到中间伺服并由指针控制
2)手套连接在柔性传感器上有两个连接可用,在细线的一侧运行连接到信号和负端子。具有较厚图案侧的侧面是与正极端子的连接。在连接信号和负极线的一侧,连接22k电阻和次级线。电线通过面包板直接通向负极端子。电阻器的一端连接到柔性传感器,另一端连接到电线,电线连接到面包板,然后连接到销中的arduino模拟电路。我使用的三个模拟引脚是A0,A1,A2。然后另一个柔性传感器连接到面包板并连接到面包板上的正柱。在fritzing文件上有一个次要的更清晰的草图,显示正,负和信号连接。
(注意 - 不在面包板中的电线的大多数物理连接是焊接的,收缩包装是
接线的最后部件是从arduino上的5V电源到正极柱的连接,接地(GND)连接到负极柱。在面包板上还有一些条形,它们将电路板两端的负极柱连接在一起,并将正极柱连接在电路板的任一端。
附加说明 - 可以使用更长的电线来延长面包板和手套或面包板和三维印刷臂之间可用的松弛量(如果需要)
步骤3:接线和代码说明
该程序的基础类似于arduino中的旋钮转动程序,整体作为电位器工作。手套上的柔性传感器根据位置变化发送信号,当手套上的手指移动时,位置的变化向arduino发送信号,然后呼吁3-D打印的“手”以相同的比例变化。
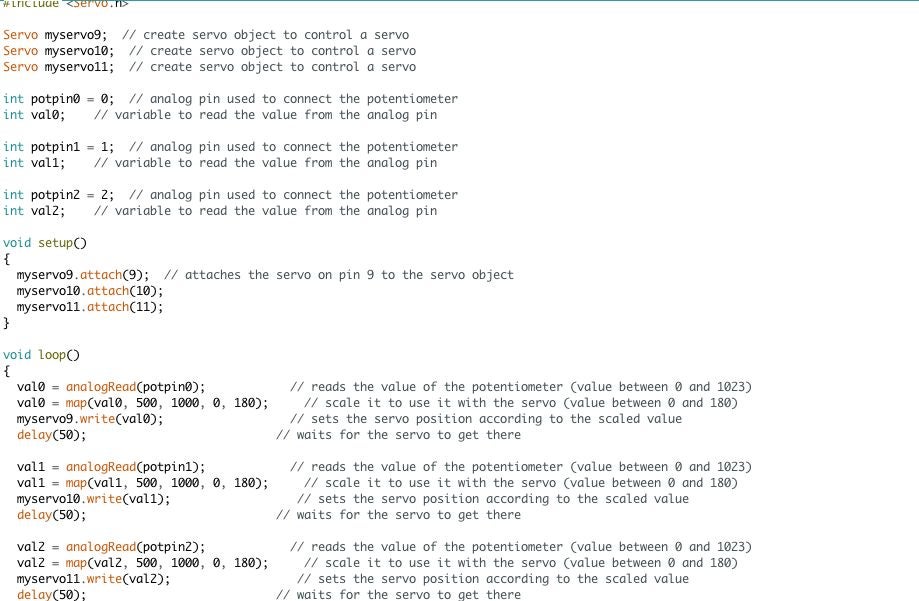
在代码中,3个伺服器定义在引脚9,10,11下。模拟引脚A0,A1,A2连接电位器
在void设置中,伺服器连接到引脚
然后,void循环包括使用3个函数analogRead,map,write和delay
analogRead-读取模拟引脚的值(与电位器通信的值)并且给出0到1023之间的值
Map-(value,fromLow,fromHigh,toLow,toHigh)map函数将模拟读取值的值范围从500,1000更改为0,180,因为0-180是伺服可以读取的值的范围,并在列表中的第一个下命名新值
servoWrite- arduino将值写入伺服并移动其位置acc ordingly
延迟 - 然后延迟导致程序在重新循环之前等待
步骤4:三维打印部件的机械结构
附加了四个STL文件以及每个部分的图像和视频。没有文件组装的图像,但有一个3D打印版本的图像。四个不同的部件通过每个接头处的3个伺服器连接。基部通过舵机连接到肩部,然后连接到第一臂文件,最后连接到第二臂文件。
步骤5:手套的机械构造
手套的构造相当简单,将柔性传感器热粘到三根手指上在手套和拉链上用来保持电线就位。
注意 - 发现如果使用的这些特殊的柔性传感器变得太脏,它会开始影响柔性传感器的工作方式,因此,将磁带放在传感器上以保持其清洁
附加说明 - 当仅使用运行到arduino的USB线为电源供电时,三维臂的运动可能会有点不稳定它可以通过电池连接更多电源并将正极和负极连接到面包板上的正负极柱来改善
步骤6:最终产品
责任编辑:wv
- 相关推荐
- 机械臂
-
制作51单片机控制的简易机械臂2016-05-11 0
-
机械臂仿真控制2020-09-29 0
-
新手求助怎样通过ROS去控制机械臂呢2021-12-21 0
-
机械臂的控制学习2022-02-23 0
-
DSP的机械臂预测控制2018-03-26 1009
-
用纸板制作液压机械臂2019-01-16 16478
-
自制遥控机械臂的教程2022-09-19 5159
-
借助手部动作控制机械臂的手语翻译成文本和语音手套2022-10-21 483
-
机械臂制作案例2022-10-28 451
-
使用EMG信号控制机械臂2022-12-29 390
-
人臂控制机械臂开源2023-01-31 475
-
Python控制的机械臂开源分享2023-02-03 384
-
如何制作机械臂2023-02-08 414
-
PC控制的机械臂设计2023-06-12 366
-
如何去提升机械臂的位置控制性能?2024-03-05 1028
全部0条评论

快来发表一下你的评论吧 !
