

简易迷宫求解机器人的制作
电子说
描述
第1步:准备好你的组件
我使用了上面列出的所有组件:
1-2齿轮直流电机
2- 2轮
3- 1 custer wheel
4- LCD
5-面包板和一些电线(男性 - 男性)&&(男性 - 女性)
6-3超声波传感器
4-超声波支架
5- Arduino UNO板
6-2电池3.7 V带电池座
7- L298N电机驱动
机器人身体的8-木制
9-开关
步骤2:第一层
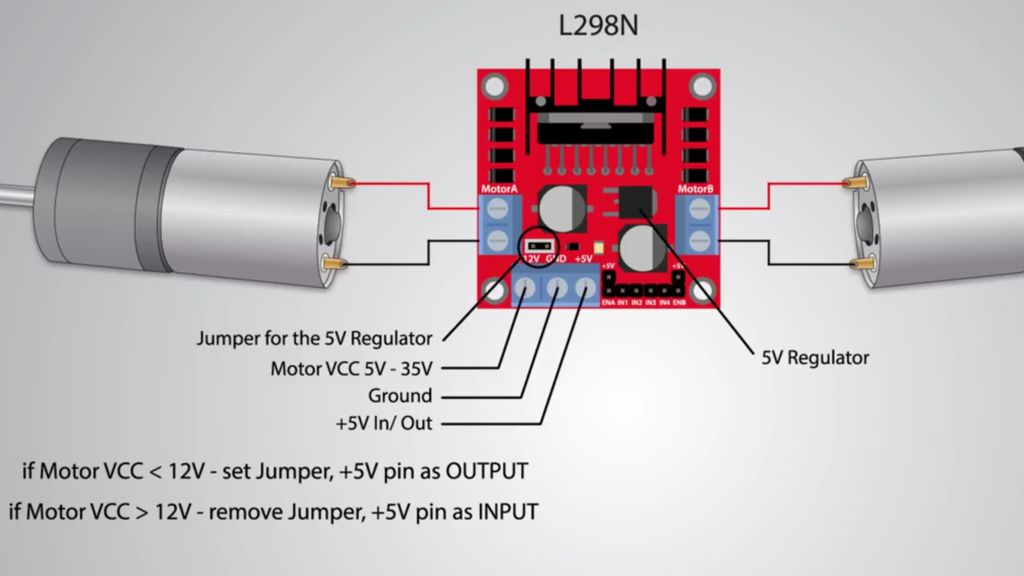
1-连接电机,w高跟鞋和驱动器的使用
2-使用电线将电机连接到电机驱动器
驱动器的3个引脚连接到引脚3,12,13,5,2,7为了arduino
请注意:
如果右侧电机的轮子向相反的方向移动,则只需更换连接到驱动器的电机的电线
步骤3:第二层
- 将arduino,传感器和面包板层放在第二层和让我们放一些电线
请阅读代码文件以了解我的连接,但让我们总结一下:
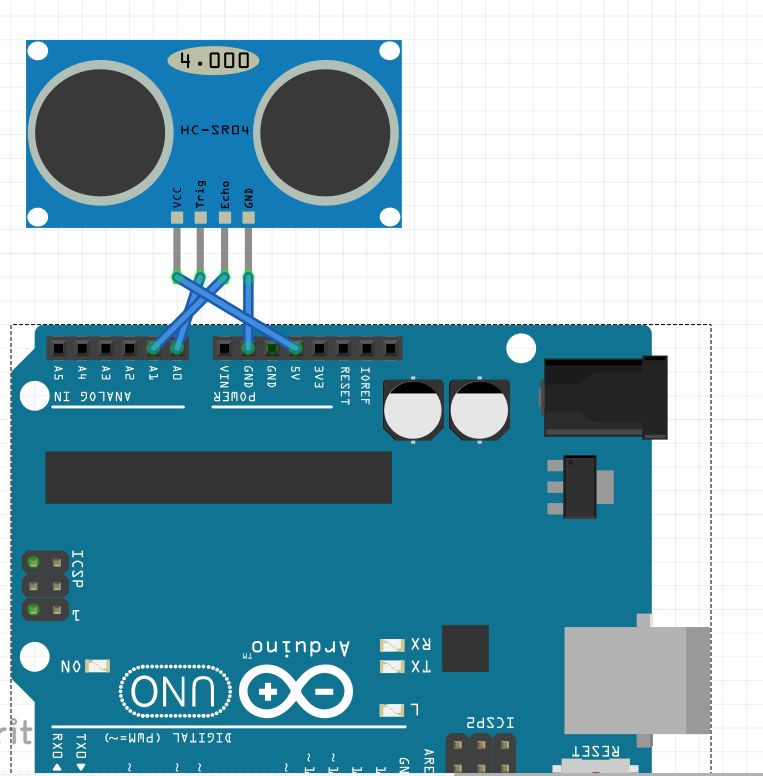
1)每个声纳传感器的VCC和GND到面包板,Trigger和Echo将连接到引脚A0,A1,A2,A3,A4,A5用于3个传感器
2)5V和GND从arduino提供breadBoard
3)5v从驱动器到arduino输入
4)从arduino到GND的驱动器
步骤4:启动电源
放置你的电池座中装有电池,然后将红线连接到i上使用arduino的电线将驱动器和黑线连接至驱动器的GND
步骤5:可选步骤
此步骤为用你的机器人带来一些快乐
1)放置你的液晶显示器并像连接的代码一样连接到arduino
2)将电池座的红线连接到ON的引脚上开关并从另一个引脚接线到驱动器的输入端以通过开关控制机器人的电源
3)最后完成并随意尝试并让我知道是否你遇到任何问题
- 相关推荐
- 热点推荐
- 机器人
-
自制巡线解迷宫机器人(上)2025-10-20 302
-
【DIY作品秀】制作简易避障机器人2012-01-10 16536
-
机器人求路线啊2012-05-26 6117
-
机器人制作宝典2012-06-09 11013
-
分享 《机器人制作天空宝典》,OHM 自律型机器人制作2013-05-06 12210
-
制作一个简易的机器人2015-02-09 21953
-
简易机器人DIY——常用工具篇2015-03-06 11847
-
智能小车机器人制作大全2019-05-05 9966
-
竞赛机器人制作技术(电路设计、编程方法、算法解析)2019-12-25 5595
-
基于ARM的机器人走迷宫控制系统与算法设计2015-12-23 847
-
基于LPC1114的迷宫机器人的设计与实现2017-09-25 908
-
竞赛机器人制作技术PDF电子书免费下载2019-12-18 1850
-
使用LSRB算法解决迷宫的线迷宫机器人2022-07-27 2904
-
虚拟迷宫求解机器人开源分享2022-11-17 747
-
AI解迷宫机器人2023-07-11 874
全部0条评论

快来发表一下你的评论吧 !
