

使用M340通过MSP0200 PTO模块实现控制LXM28伺服的说明
描述
本文介绍M340通过MSP0200PTO模块发脉冲控制LXM28伺服的实现。
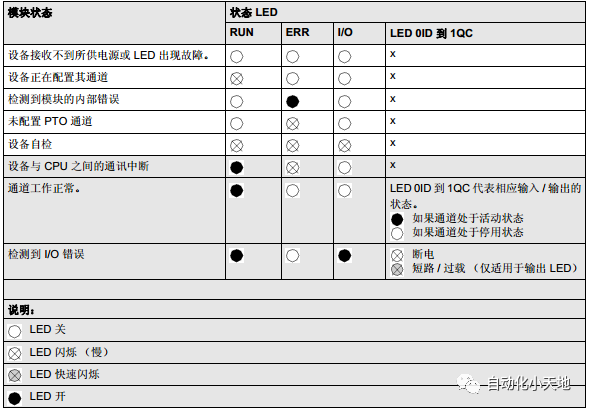
①为模块LED状态指示

顶部行显示模块信息;
中间行 0xx 对应于 PTO 通道 0;
底部行 1xx 对应于 PTO 通道 1 ;
y = 0 :通道0 y=1:通道1
LED yID:通道 y 的 Drive_Ready&Emergency 输入
LED yIC:通道 y 的 Counter_in_Position 输入
LED yIO:通道 y 的原点输入
LED yIP:通道 y 的 Proximity&LimitSwitch 输入
LED yQ+:通道 y 的 PTO CW 输出
LED yQ-:通道 y 的 PTO CCW 输出
LED yQD:通道 y 的 Drive_Enable 输出
LED yQC:通道 y 的 Counter_Clear 输出
②为接线端子分布
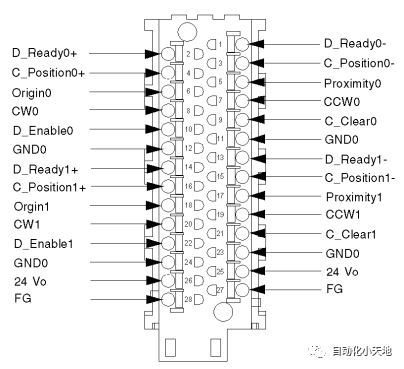
最简PTO接线:
以通道0为例
MSP0200PTO模块24,26号分别接开关电源0V,24V+;
MSP0200PTO模块1,2号分别接开关电源0V,24V+;
(ready信号一直接通)
MSP0200PTO模块7,8号分别接伺服37,41号管脚;
伺服35,39号接24V+;
伺服参数:
P1-00=2
P1-01=0
自动使能
P2-10=1
P2-68=1
电子齿轮比,举例1000个脉冲转一圈
P1-44=1280
P1-45=1
限位急停按需设置
P2-15=122
P2-16=123
P2-17=121
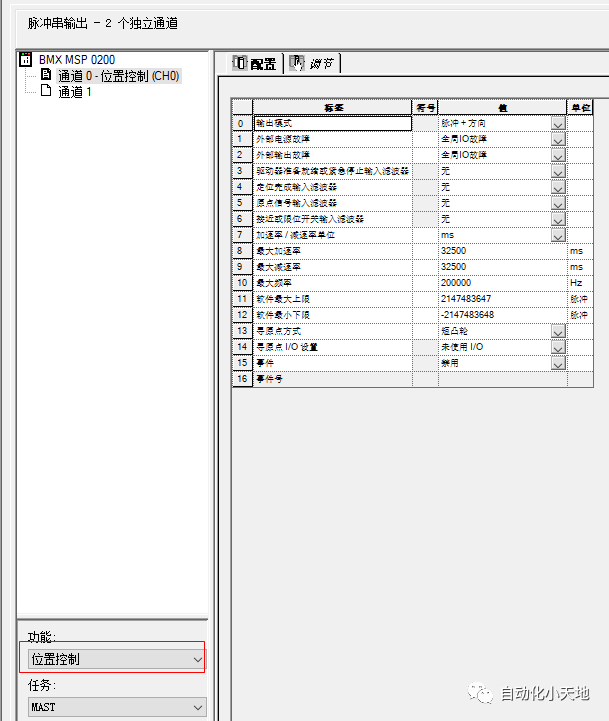
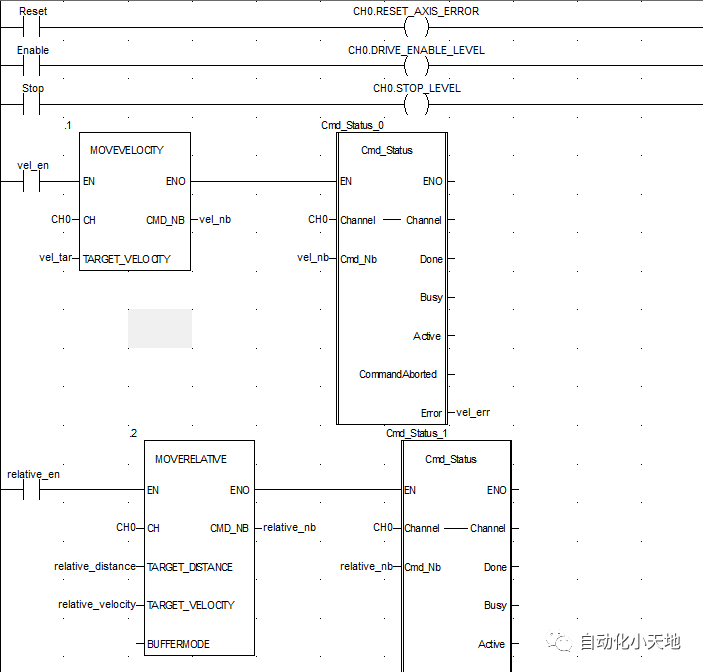
M340组态编程:
选择模块功能为位置控制;
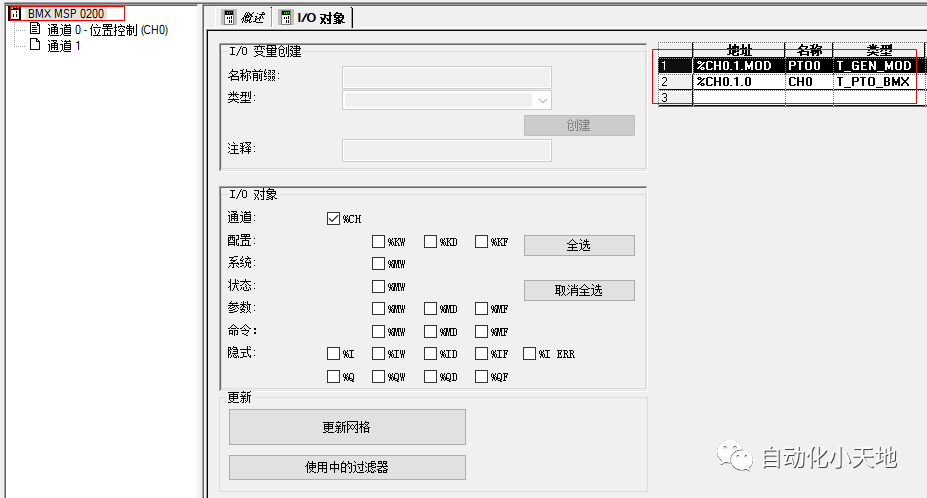
声明IODDT变量;

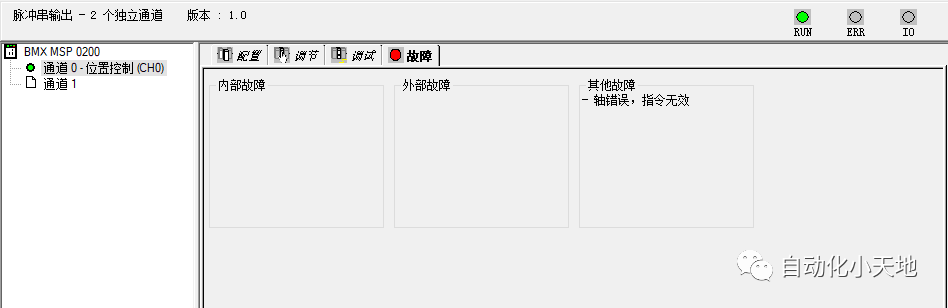
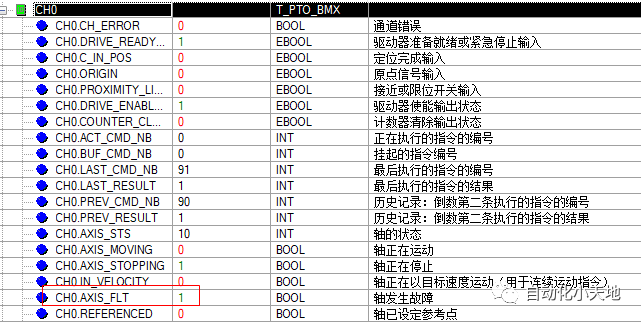
故障排查
MSP0200PTO模块:
1.模块LED状态指示
2.故障诊断界面
3. 通道结构体变量
LXM28伺服:
在确定模块有脉冲输出后,如果电机仍无法运行,请检查:
伺服是否报警;
使能是否正常;
伺服是否收到脉冲(P0-02监控);
-
[原创]液晶显示模块LXM1043T,LXM1261介绍.2009-02-26 3288
-
上海求购施耐德 M340 CPU模块BMXP3410002020-06-11 613
-
苏州高价回收施耐德PLC,施耐德M340系列plc模块2021-05-08 921
-
Modicon M340指南2012-02-17 911
-
LXM28A和BCH2伺服驱动系统技术参数、基础知识和设计安装全手册2017-09-20 1424
-
基于Modicon M340在各领域中的应用介绍2017-09-23 860
-
基于Modicon M340的硬件配置及编程2017-09-25 775
-
Modicon M340硬件配置及编程2017-10-13 673
-
Modicon M340型号规格2017-11-20 614
-
施耐德M340 PLC和变频器Modbus通信指导2019-02-11 20974
-
EG网关串口连接施耐德M340PLC应用案例2023-12-06 2463
-
ProfibusDP转ModbusRTU网关实现施耐德M340与欧姆龙CP1H数据互通2025-06-13 747
-
工业自动化施耐德M340与ABB AC500 PLC Modbus协议转换方案2025-11-24 2245
-
施耐德 M340 PLC 以太网模块与上位机、国产触摸屏核电站监控配置案例2026-03-27 992
全部0条评论

快来发表一下你的评论吧 !
