

自制Arduino探测车DIY图解
电子说
描述
步骤1:Raspberry Pi Config(运动)
使用运动设置网络摄像头:
连接到RPi:
sudo apt-get update
sudo apt-get upgrade sudo apt-get install nano sudo apt-get install motion
编辑运动文件:
sudo nano /etc/default/motion
更改以下行:
start_motion_daemon=yes
编辑配置文件:
sudo nano /etc/motion/motion.conf
并更改或检查以下参数:
set “daemon on” set “minimum_frame_time 3” set “quality 80” set “webcam_port 8081” set “control_port 8080” set “webcam_localhost off” 《立方厘米= 1》
。
现在要查看显示的图片,请打开浏览器,网址为http://YOURIPADDRESS:8081
。
。
有关运动的更多信息:
http://www.lavrsen.dk/foswiki/bin/view/Motion/WebH 。..
步骤2:Raspberry Pi Config(WiringPi)
要安装WiringPi,您需要先安装git-core。
set “width 640”
然后,获取WiringPi文件:
set “height 480” sudo service motion restart sudo apt-get install git-core
您可以使用以下方式检查安装:
git clone git://git.drogon.net/wiringPi
结果将
。
更多信息,请访问:
http://wiringpi.com
http://connectionpi.com/the-gpio-utility/
步骤3:Raspberry Pi配置(Apache Web服务器+ Php)
安装Apache和php5 :
cd wiringPi
要检查apache是否正在运行,请打开浏览器并转到http ://YOURIPADDRESS
您应该获得默认页面“它有效”(图1)。
要检查php安装:
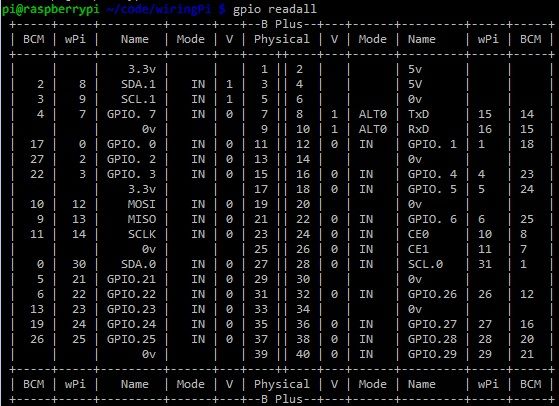
。/build gpio -v
gpio readall
插入以下行
?》
然后打开浏览器并转到http://YOURIPADDRESS/info.php
您应该获得php信息页面(图片2)。
。
安装Web界面以控制您的流动车
将文件从web.tar.gz提取到/var/www/
sudo apt-get install apache2 php5 libapache2-mod-php5 cd /var/www
。
在/var/www/index.php更改第31行,用您的wlan0 IP地址替换0.0.0.0。
。
让pi用户访问Web文件夹
sudo chown -R pi:www-data/var/www
sudo gpasswd -a pi www -data
。
现在打开浏览器,网址为http://YOURIPADDRESS/index.php
您应该获得类似于手机屏幕截图的结果(图3) )
步骤4:将文件上传到Arduino
将此草图上传到您的arduino,或下载YEAR-sketch.ino
#include Servo Vservo;
int Hstate = 90;
int Vstate = 90;
int in1 = A2;
int in2 = A3;
int in3 = A4;
int in4 = A5;
int camup = 6;
int camdown = 7;
int camleft = 8;
int camright = 9;
int p2;
int p3;
int p4;
int p5;
int p6;
int p7;
int p8;
int p9; void setup(){ Vservo.attach(11);
pinMode(A2,INPUT);
pinMode(A3,INPUT);
pinMode(A4,INPUT);
pinMode(A5,INPUT);
pinMode(6,INPUT);
pinMode(7,INPUT);
pinMode(8,INPUT);
pinMode(9,INPUT);
pinMode(2,OUTPUT);
pinMode(3,OUTPUT);
pinMode(4,OUTPUT);
pinMode(5,OUTPUT);
}
void loop(){
p2 = AnalogRead(A0) );
p3 =模拟读取(A1);
p4 =模拟读取(A2);
p5 =模拟读取(A3);
p6 =数字读取(camup);
p7 =数字读取(camdown );
p8 = digitalRead(camleft);
p9 = digitalRead(camright);
if(p6 == LOW || p7 == LOW)
stop();
如果(p6 == HIGH || p7 == HIGH)horizontal();
if(p8 == HIGH || p9 == HIGH )
vertical();
if(p2》 512)
forward();
if(p3》 512)
backward();
if(p4》 512)
left();
if(p5》 512)
right();
}
void horizontal()
{
if(p6 == HIGH && p7 == LOW)
{Hstate = Hstate + 2; }
if(p6 == LOW && p7 == HIGH)
{Hstate = Hstate-2; }
if(p6 == HIGH && p7 == HIGH)
{Hstate = 90; }
if(Hstate》 = 180)Hstate = 180;
if(Hstate 《= 0)Hstate = 0;
Hservo.write(Hstate);
delay(150);
}
void vertical()
{
if(p8 == HIGH && p9 == LOW)
{Vstate = Vstate + 2; }
if(p8 == LOW && p9 == HIGH)
{Vstate = Vstate-2; }
if(p8 == HIGH && p9 == HIGH)
{Vstate = 90; }
if(Vstate》 = 180)Vstate = 180;
if(Vstate 《= 0)Vstate = 0;
Vservo.write(Vstate);
delay(150);
}
void forward()
{
digitalWrite(2,HIGH);
digitalWrite(3,LOW);
digitalWrite(4,HIGH);
digitalWrite(5,LOW );
}
无效向后()
{
digitalWrite(2,LOW);
digitalWrite(3,HIGH);
digitalWrite(4,LOW);
digitalWrite(5,HIGH);
}
void left()
{
digitalWrite(2,HIGH);
digitalWrite(3,LOW);
digitalWrite(4,LOW );
digitalWrite(5,HIGH);
}
void right()
{
digitalWrite(2,LOW);
digitalWrite(3,HIGH);
digitalWrite(4,HIGH);
digitalWrite(5,LOW);
}
void stop()
{
digitalWrite(2,LOW);
digitalWrite(3,LOW );
digitalWrite(4,LOW);
digitalWrite(5,LOW);
}
伺服库应已安装
步骤5:即插即用!
-设置流动站轮(和电动机)
-设置伺服器和网络摄像头
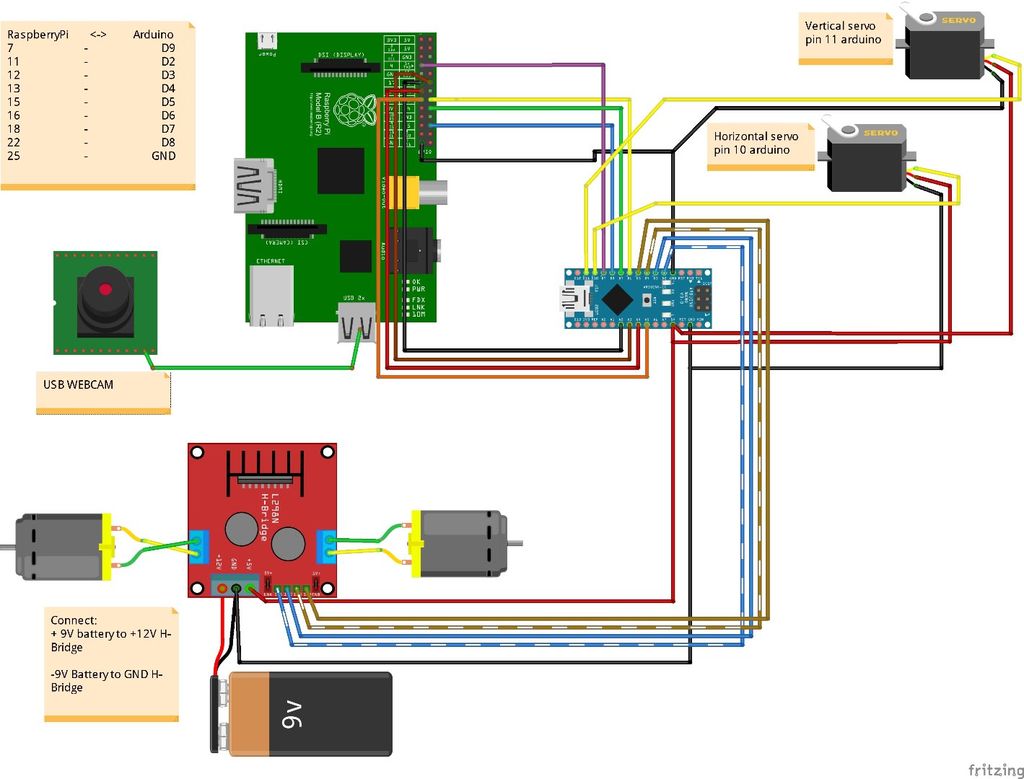
-将H桥连接到电动机
-将H桥连接到Arduino
-将Raspberry连接到Arduino
-将摄像头插入Raspberry
-将电池连接到H桥,将arduino和Rasperry插入移动电源。
责任编辑:wv
-
用PVC管自制遥控火车模型的教程图解2012-12-29 13307
-
如何自制金属探测器2021-05-20 3309
-
LED手电筒DIY自制2011-12-12 32716
-
DIY:自制雷电预报器2017-01-24 1209
-
如何自制手机充电宝?DIY图解步骤2018-01-18 33004
-
自制加湿器图解2018-09-07 101678
-
自制BFO金属探测器DIY图解2019-09-23 27094
-
智能手表DIY图解2019-10-09 10046
-
DIY敏感的Arduino IB金属探测器2022-10-21 2177
-
DIY自制声音传感器2022-10-28 1373
-
DIY Arduino角灯2022-11-02 822
-
DIY Arduino示波器2022-11-11 1059
-
基于arduino的自制呼吸机2022-11-16 1402
-
基于Arduino平台的DIY示波器2022-11-30 1864
-
DIY Arduino电子沙漏2023-02-06 2035
全部0条评论

快来发表一下你的评论吧 !
