

怎样将IR Sensor与Arduino和程序结合使用以消除噪声
电子说
描述
步骤1:红外传感器的工作:
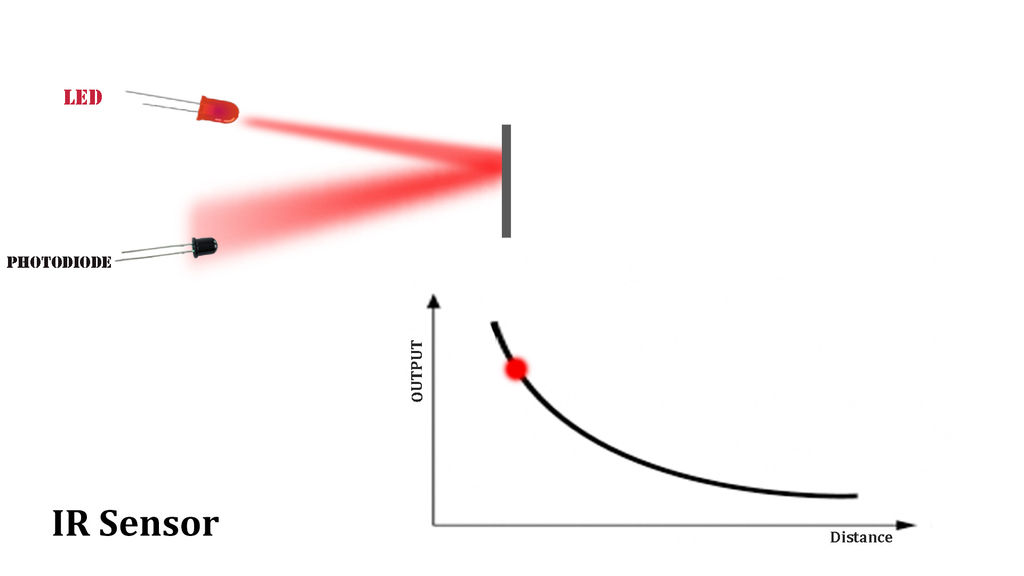
使用红外传感器非常容易测量距离。
一束红外光透射到目标,反射光束被光电二极管捕获。
光电二极管测量光的强度(这里大部分是红外光)。红外二极管不仅可以测量红外光的强度,而且对可见光也很敏感。
在这里,光电二极管记录的红外光的强度代表目标与传感器之间的距离。
目标越近,记录的光强度越高,并且随着距离的增加而降低。
步骤2:为传感器制造电路:
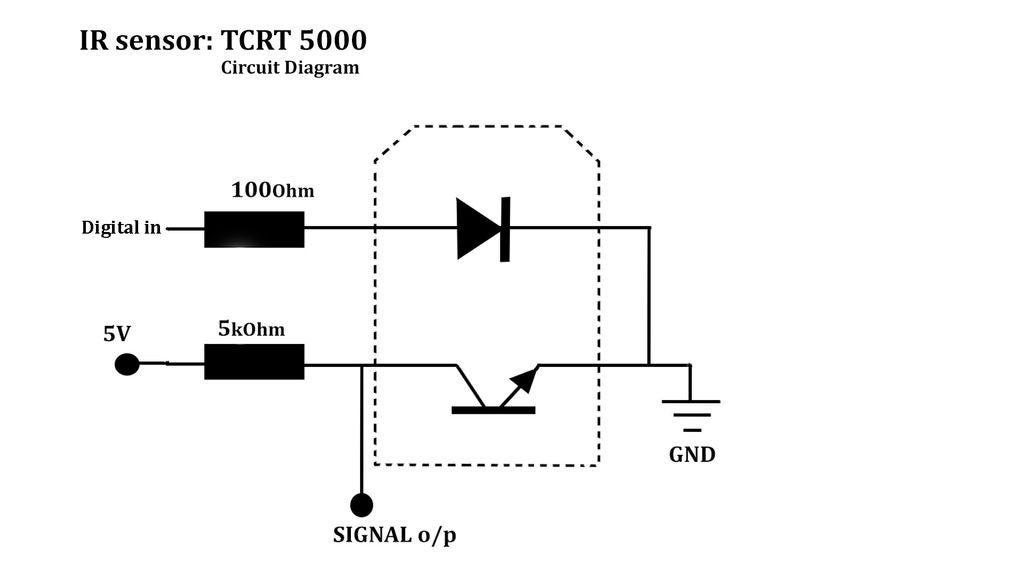
我们正在使用基本电路来驱动光电二极管。我们还可以使用基于运放的更准确,更好的方法来进行精确测量。
IR LED与Arduino的数字引脚串联了100欧姆的电阻。然后将光电二极管连接到与5v电源串联的5k欧姆电阻,并从信号中取出信号,该信号进入Arduino的模拟输入引脚。
步骤3:检查电路:
将此代码上传到arduino。
void setup()
{
Serial.begin(9600);
pinMode(6,OUTPUT);
}
无效循环()
{digitalWrite(6,HIGH);
delayMicroseconds(500);
A = analogRead(A3);
Serial.println(a)的}
现在打开串行绘图仪,然后将一些目标移到传感器前面。绘图也应根据目标位移的移动而移动。
此方法的问题:
测量对环境敏感。光线的任何变化都会破坏测量。
例如,如果我们在早上校准传感器,则不能在晚上使用。甚至在室内,如果我们打开或关闭室内灯光,校准也会发生变化。
步骤4:噪声和解决方案的来源:
有多种噪声源,例如:
太阳的红外辐射:很大一部分对地球的IR辐射。
室内照明:红外光电二极管不仅捕获红外光,而且还感知到室内照明光透射的可见光。
》
热源:所有热源均发出某种形式的辐射,这些辐射被IR光电二极管捕获。这些辐射的数量,因此误差取决于身体的温度和大小。
这些源发出的IR辐射被IR光电二极管捕获。因此误差被添加到我们的测量中。
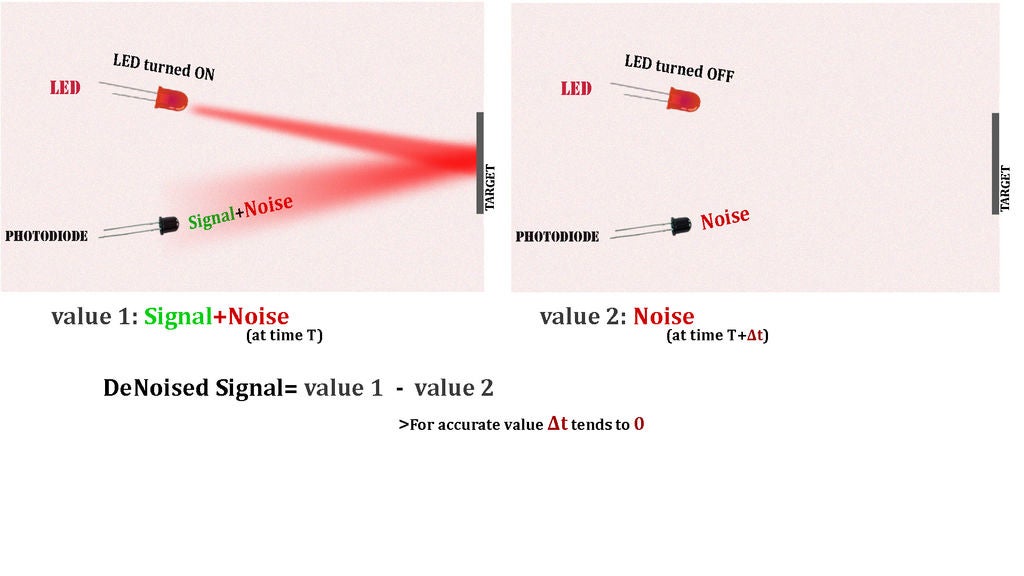
解决方案:
由于 可以显示在第三张图片中,
如果我们打开led比光电二极管测量噪声+信号,如果led关闭光电二极管仅测量噪声。
这两个值之间的差将得到去噪数据。
如果我们非常快地读取两个读数足够的去噪效果会更好。
附加的代码可用于从传感器获取纯净/去噪的数据。
步骤5:去噪和应用的测试代码
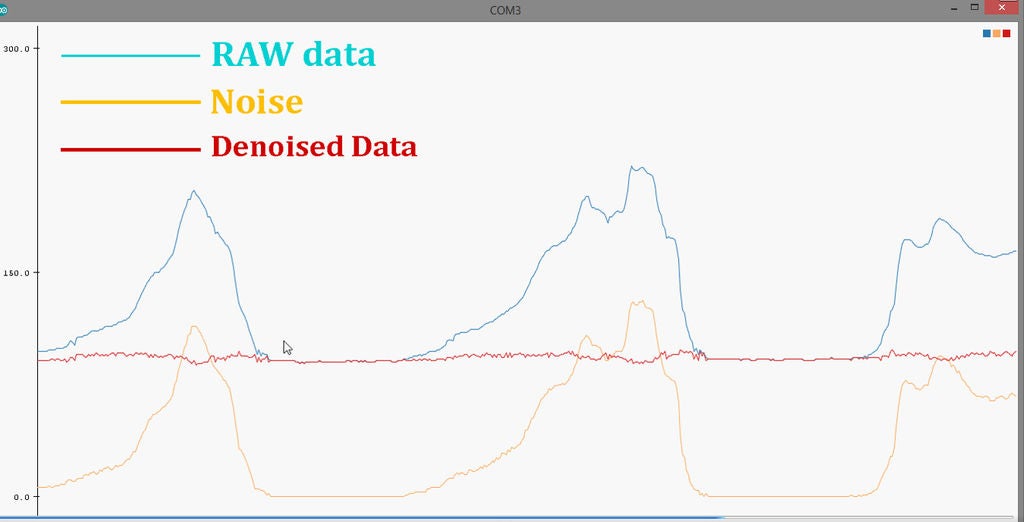
这些图片显示RAW数据,噪声值和纯信号。您还可以参考视频,其中存在闪烁的光以及静态噪声时传感器的输出。
此方法可用于线路跟随器,因此我们不需要每次都校准传感器采用。它也可以用于某些使用红外传感器具有相同优势的机器人。
责任编辑:wv
-
Arduino控制器的程序结构是怎样的2022-01-25 1061
-
怎样去编写IR NEC协议的驱动程序呢2022-02-14 1305
-
IR-Linked Temperature Sensor2009-04-17 1494
-
PCB设计中怎样消除反射噪声2019-08-17 3901
-
怎样使用Arduino控制电视2019-10-31 3178
-
构建Arduino IR远程解码器的教程2022-08-10 2334
-
ARDUINO IR控制继电器开源分享2022-08-17 1037
-
使用Grove Sensor的Arduino MKR1010和阿里云IoT2022-10-27 960
-
消除工厂中的噪声2022-11-02 677
-
带有Arduino UNO的IR接收器和继电器模块2022-11-11 909
-
将ATtiny85与Arduino IDE结合使用2023-02-10 2419
-
带有Blynk和IR的Arduino ESP8266控制继电器2023-06-30 1805
-
如何制作基于Arduino的IR接收器?2023-07-10 2655
-
MAX25405: IR Gesture Sensor with Lens for Automotive Applications Data Sheet MAX25405: IR Gesture Sensor with Lens for Automotive Applicatio2023-10-17 54
-
如何设置Arduino IR发射器电路2024-02-11 2215
全部0条评论

快来发表一下你的评论吧 !
