

如何使用通过OpenBCI硬件和OpenBCI GUI流式传输的EMG数据来控制Hexbug的动作
电子说
描述
步骤1:将跨接电缆焊接到控制器

1.1卸下控制器盖
通过将平头螺丝刀或其他工具楔入控制器的四个锁定卡舌中,撬开透明的塑料外壳。抓住滑动通道切换器和外壳本身。所有其他按钮都可以丢弃。
卸下粘贴的按钮并丢弃。另外,解焊“开火”按钮并丢弃。
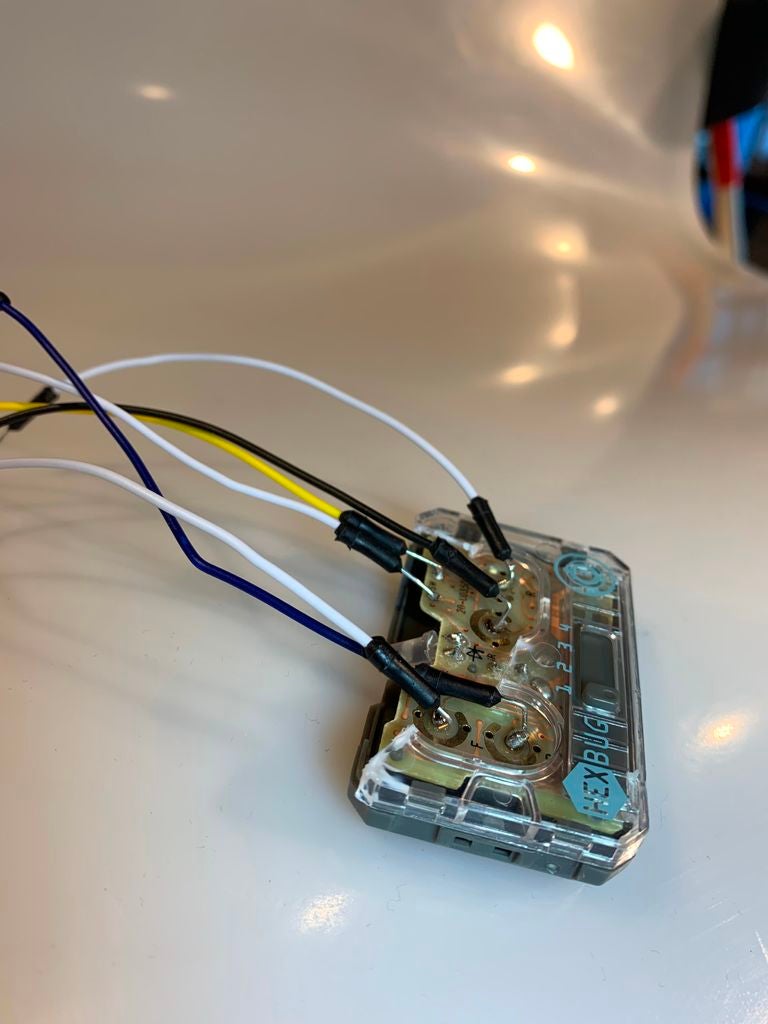
1.2 跨接电缆上的焊接
然后分别焊接的公-公跳线连接到较小的内部圆圈,其中向前,向后,向左和向右按钮位于其中。还要焊接到拆下的消防电缆的连接,其接地引脚在其左侧。
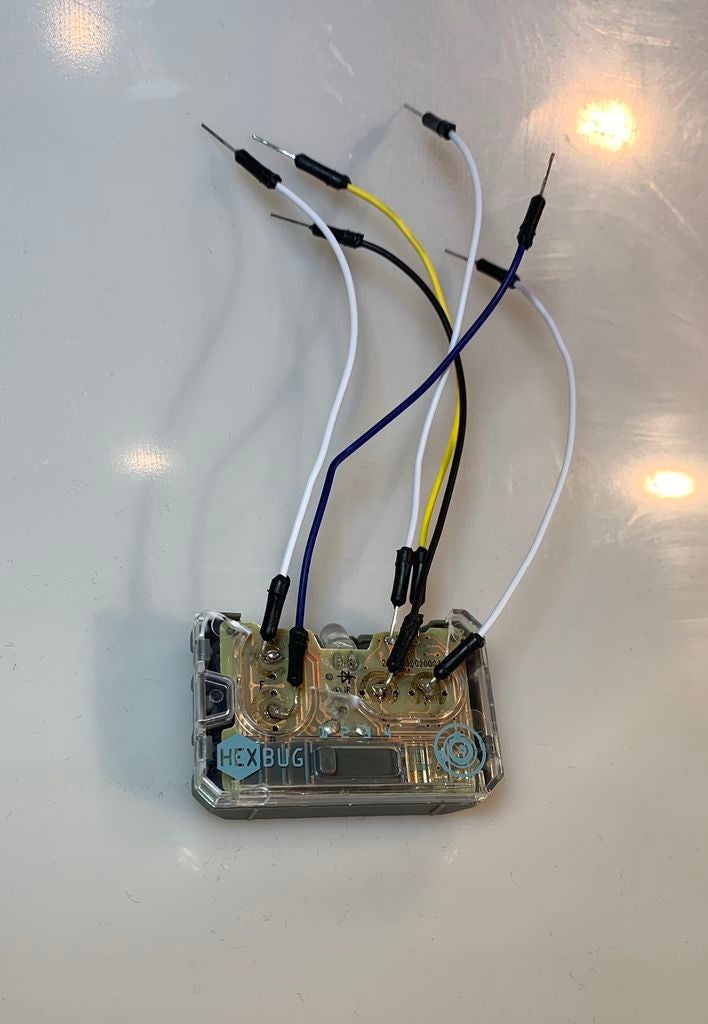
1.3更换控制器的盖子
使用剪刀或美工刀,从透明的塑料盖上切下会干扰跨接电缆位置的碎片,然后将其重新安装到控制器上,并保持通道开关就位。
我们重复使用盖子,以使滑动通道切换器有效地与板上的导电贴片接触。
步骤2:创建面包板设置并连接控制器
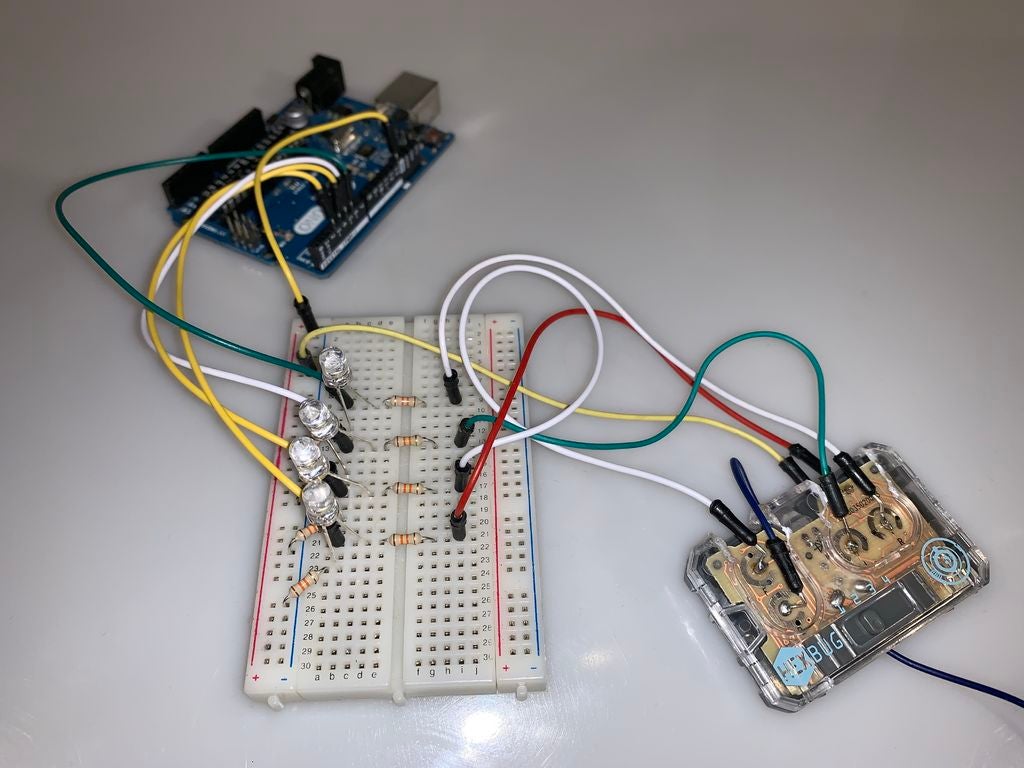
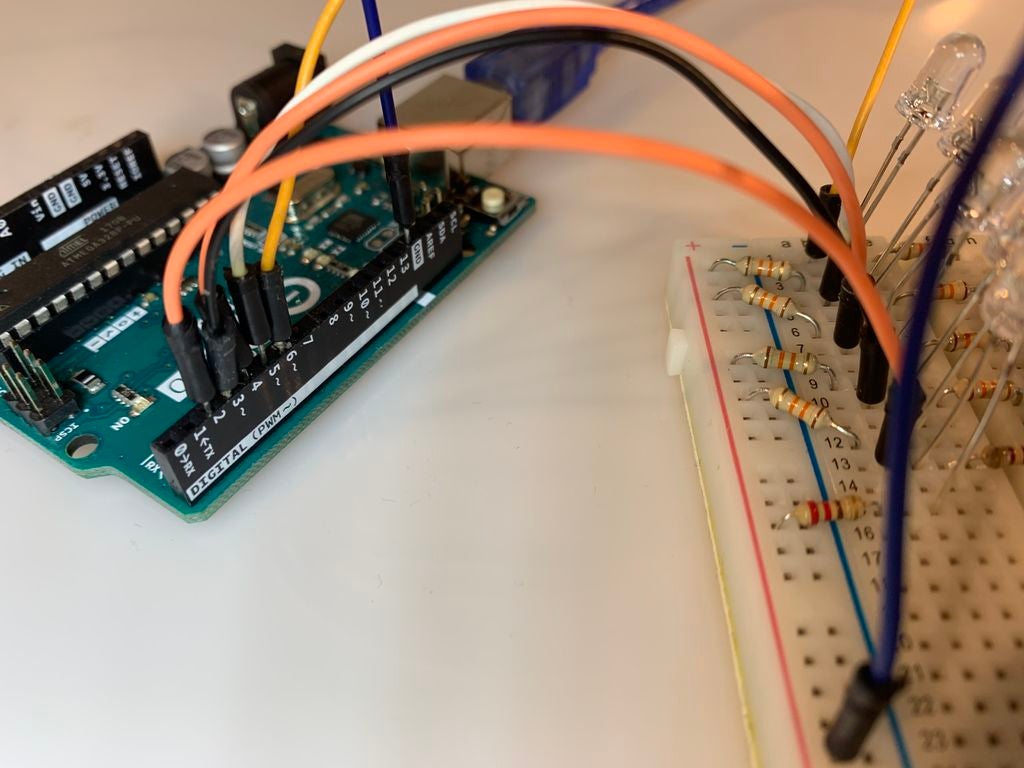
重新创建设置,如上所示。
说明:
2.1将控制器引脚放置在面包板上
每个命令将位于其自己的行中。将每个销钉放在面包板内部的单独一行中。从上到下,这些命令的顺序应为右,左,前进,开火。
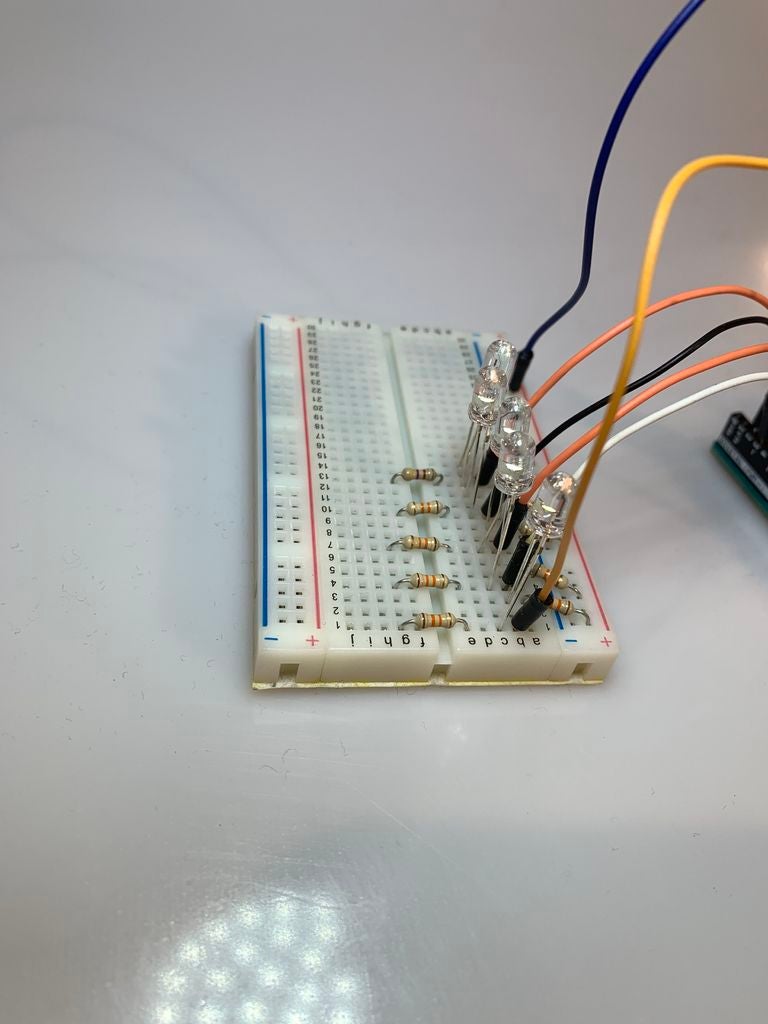
2.2添加电阻器
在插入这些引脚之后,添加一个10KΩ电阻器,将面包板的两侧桥接起来。这样可以纠正流到每个引脚的电流量,从而使错误可以正常工作。
2.3添加错误检查LED
出于可视化目的,在这一点上,我们还可以添加一个LED。 LED的阳极应与控制引脚和电阻器对齐,而阴极应位于面包板的另一条线上。将另一个电阻从阴极线连接到面包板的接地。请注意,此步骤是可选步骤,但可以帮助解决电路中的任何错误。
2.4将设置连接到Arduino
最后,添加另一根跳线将每一行连接到Arduino引脚。重要的是,它们的对应关系如下:
3-射击
4-转发
5-左
6-右
步骤3 :使用流式合成数据进行测试

3.1将示例代码上传到开发板
下载后我们提供的代码,在Arduino中打开。将开发板连接到笔记本电脑,并确保从工具下拉列表中将其选择为端口。
然后,将您的代码上传到Arduino开发板。
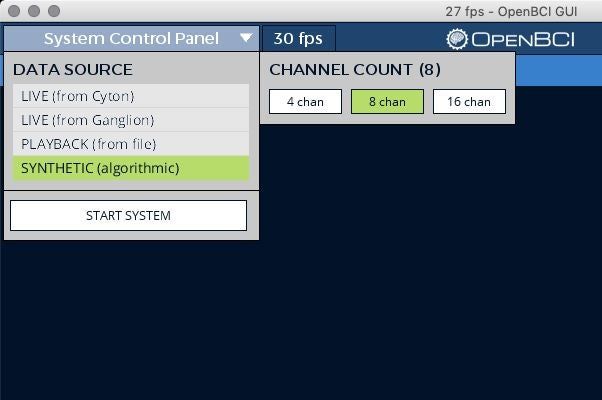
3.2开放式综合流
8个通道在此示例中可以正常工作。单击“启动系统”继续。
打开GUI后,关闭6-8通道。
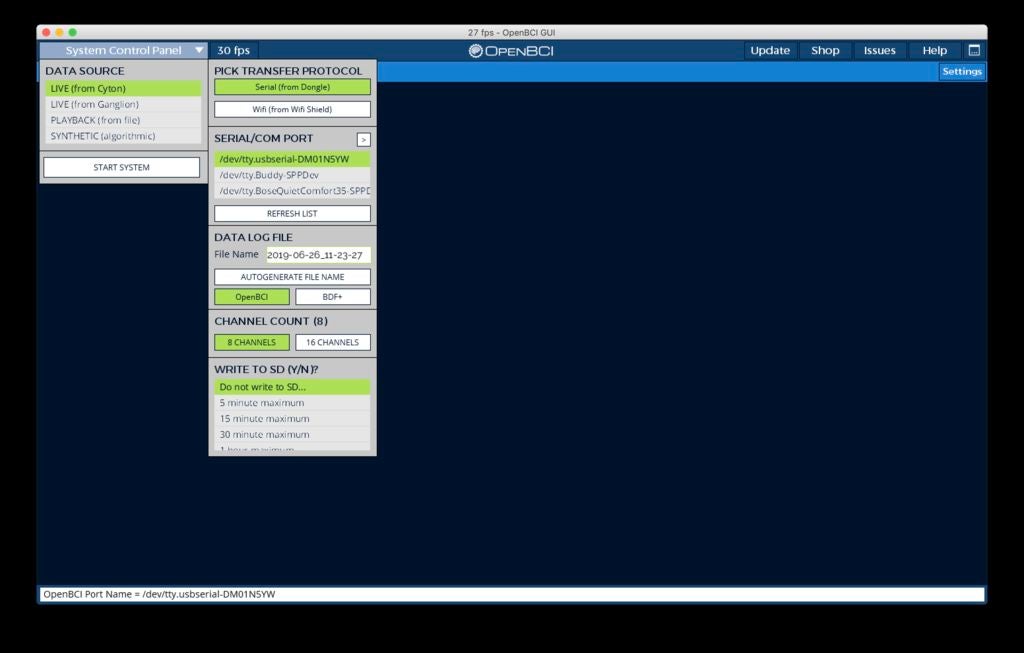
3.3设置网络小部件
使用串行模式打开并设置网络小部件,如图所示。我们希望数据类型为“ EMG”。
另外,请注意,我们Arduino草图中的波特率为57600,因此我们从Baud下拉列表中选择57600。
请确保为Arduino选择正确的端口。这是我们用于将草图上传到Arduino的端口。如果使用的是Mac/Linux,则应将其标记为“ usbmodem”,与标有“ usbserial”的OpenBCI板不同。
一旦确认所有信息正确,请按开始!/p》
3.4运行测试
由于综合数据难以控制,因此请调整EMG小部件中的设置,直到方差足够大以通过阈值为止代码中枚举的值。如果这还不够的话,您可能需要更改代码中的阈值并重新上传到您的电路板上。
它可能还有助于一次关闭除一个通道之外的所有通道,并逐个测试每个命令,以确保它们都按照预期的方式工作。确认一切正常后,就可以继续使用真实数据。
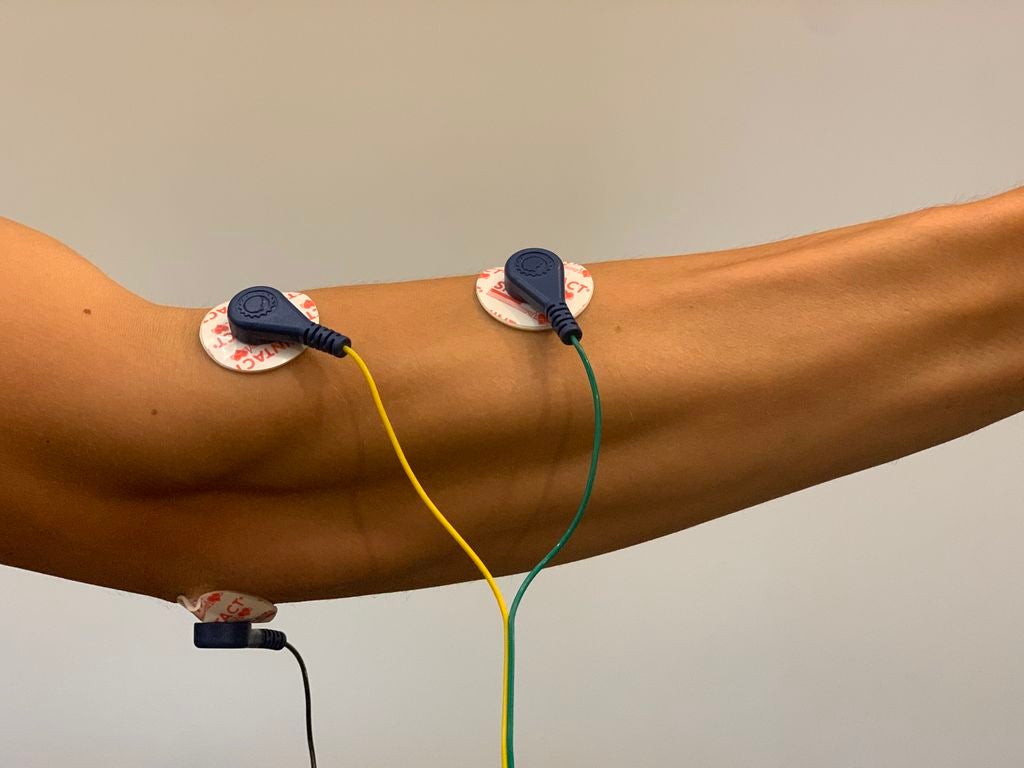
步骤4:设置OpenBCI板和电极

这可以采取两个方向:一个人控制所有5条命令,或者多人控制每个命令。
选项A:一个人可以控制所有五个命令
只需按照此处的OpenBCI文档中的EMG安装指南中的说明进行操作。
选项B:多人控制不同的命令
遵循OpenBCI网站上的EMG设置教程,但要进行以下更改:必须将多个基础拼接在一起。
为此,请切掉大约3英寸的公插针线和一根母插针线的末端,并从末端去除一英寸的橡胶以露出内部的线。对尽可能多的公线重复此操作,以使每个人都有自己的地面。将这些裸露的末端拼接在一起,并将它们包含在一条热缩管中。
步骤5:连接到真实数据
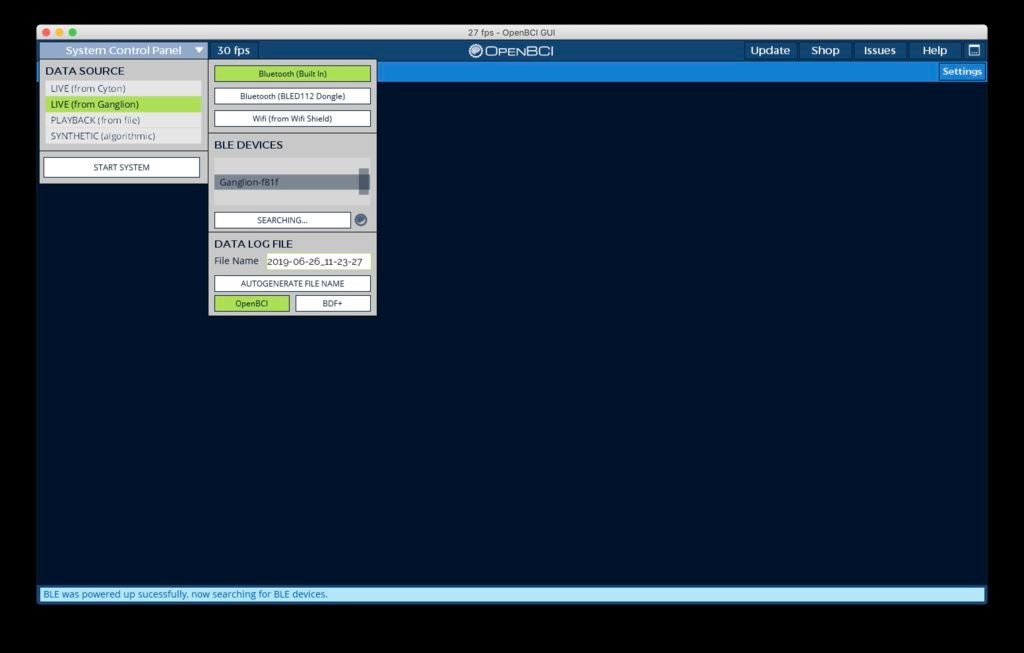
现在,返回GUI主页,并根据您使用的板卡,选择LIVE(来自Cyton)或LIVE(来自Ganglion)作为数据源。
从这里,打开EMG Widget和Networking Widget,并完全像以前一样开始流式传输。现在,数据应该来自实时输入!
第6步:战斗!
现在一切就绪,您就可以战斗了。如果已经创建了两个设置,则可以使用控件进行战斗。
请注意,应该一次打开一个机器人,以确保从两个唯一的来源收集信号。
每个hexbug都有3个生命,当这些生命都过去之后,只需按电源按钮即可重置得分。
玩得开心,战斗起来!
步骤7:故障排除-键盘控制代码
如果您遇到任何问题电路板设置,并希望仅使用键盘输入来控制它,请下载此代码以使用内置的Arduino串行监视器来控制电路。这将使您能够隔离每个动作,并确定您遇到的问题是来自物理Arduino设置还是来自数据。
责任编辑:wv
-
请问如何将脑电数据经过数据转换器输出?2024-12-17 316
-
用动作控制GUI的工作原理2011-06-01 4825
-
通过判断串口传过来的数据来控制不同动作怎么切换到其他的动作2019-02-21 1928
-
怎么将数据流式传输到E4438C2019-04-16 4145
-
如何通过UBFS获得流式ADC数据的最高吞吐量?2019-10-11 2227
-
通过UDP传输数据时ADC1上的噪声是怎么来的?2023-04-12 517
-
流式传输的基础知识2008-12-29 2169
-
流式传输的实现途径2011-05-16 784
-
Freshworks的无缝实时流式传输事件来构建客户数据2022-09-14 1735
-
通过基于CNN的EMG识别进行实时仿生手臂控制2022-10-24 1608
-
使用EMG的机械手控制2022-11-07 1219
-
使用Arduino大数据工具进行温度流式传输2022-11-11 862
-
使用MyoWare EMG肌肉传感器来控制伺服电机2022-12-07 997
-
使用EMG信号控制机械臂2022-12-29 720
全部0条评论

快来发表一下你的评论吧 !
