

英利工控主板的多通道数据采集方案
描述
使用英利工控主板进行简单的扩展,可以构成一个多通道AD数据采集方案。这一方案的原理是通过英利工控主板的精简ISA总线扩展一片TLC2543,,即可以实现8路模拟量输入。其中输入量程0-5V,AD转换精度12bit,AD转换速度100Ksps。
硬件部分
该方案的主要硬件构成如下:
其中TLC2543通过4线制SPI接口与英利工控主板连接,具体信号定义如下:
(1)SPI_CS:SPI片选信号,低电平有效;从英利工控主板输出,接到TLC2543
(2)SPI_CK:SPI接口的同步时钟信号;从英利工控主板输出,接到TLC2543
(3)SPI_DO:SPI接口数据输出,从英利工控主板输出的转换命令,输入到TLC2543
(4)SPI_DI:SPI接口数据输入,从AD芯片输出的转换数据,输入到英利工控主板
此时可以采用英利工控主板的GPIO模拟出SPI接口(以EM9160为例):
#define SPI_CS GPIO15
#define SPI_CLK GPIO14
#define SPI_DOUT GPIO13
#define SPI_DIN GPIO12
#define SPI_EOC GPIO10
除AD输入以外,该应用底板还有如下接口:
(1)1个10M/100M以太网接口
(2)4个带隔离RS485总线接口,1个RS232串口,1个TTL串口
(3)2个USB Host接口,1个USB Device接口
(4)单色点阵液晶接口(支持LCD对比度调节和背光控制)
(5)矩阵键盘和LED接口
(6)精简ISA总线接口
该应用底板和英利工控主板配套,已经可以满足一般的数采应用需求。如果客户需要更多的数据输入,可以参考该应用底板的方式进一步扩展;如果客户需要更多的其他功能,可以参考英利的开发评估底板和功能扩展模块进行设计。
软件部分
TLC2543是4线制SPI接口,因此它的读写操作是同时进行的,即所谓全双工串行数据传输。在构造函数时,需要仔细研究AD芯片数据手册上提供的SPI接口时序关系,如下图所示:
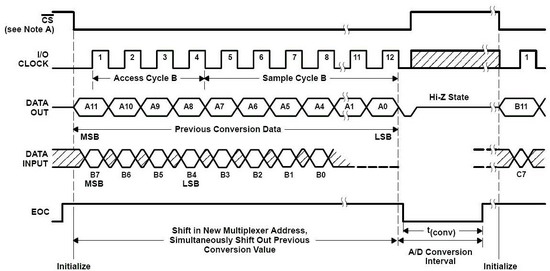
软件开发过程中需注意以下几点:
1、在SPI_CS片选有效后,TLC2543将把上次AD转换的数据,按MSB在先的顺序,呈现在SPI_DI信号线上,并在SPI_CK的
下降沿更新数据
2、SPI_CK的上升沿将把对AD芯片的操作指令锁存到AD芯片,输出的数据也是按MSB在先的顺序
3、输入AD的操作指令只有8个bit,而从AD读出的转换数据有12个bit,在读入低4bit时,输入指令用“0”填充
4、芯片数据手册中串行输入输出数据与我们的定义SPI_DO和SPI_DI是正好相反的
5、读出的数据须经过格式转换,才能转为通常所见的电压值
据上所述,可以构建相应的操作函数如下:
// TLC2543的SPI接口初始化函数
int SPI_Init( int fd )
{
SPI_OutEnable( fd, SPI_CS );
SPI_OutEnable( fd, SPI_CLK );
SPI_OutEnable( fd, SPI_DOUT );
SPI_OutDisable( fd, SPI_DIN );
SPI_OutDisable( fd, SPI_EOC );
SPI_OutSet( fd, SPI_CS );
SPI_OutClear( fd, SPI_CLK );
return 1;
}
// 输出使能
int SPI_OutEnable( int fd, unsigned int dwEnBits )
{
int rc;
rc = ioctl( fd, EM9X60_GPIO_IOCTL_OUT_ENABLE, &dwEnBits );
return rc;
}
// 输出禁止
int SPI_OutDisable( int fd, unsigned int dwDisBits )
{
int rc;
rc = ioctl( fd, EM9X60_GPIO_IOCTL_OUT_DISABLE, &dwDisBits );
return rc;
}
// 位置高
int SPI_OutSet( int fd, unsigned int dwSetBits )
{
int rc;
rc = ioctl( fd, EM9X60_GPIO_IOCTL_OUT_SET, &dwSetBits );
return rc;
}
// 位置低
int SPI_OutClear( int fd, unsigned int dwClearBits )
{
int rc;
rc = ioctl( fd, EM9X60_GPIO_IOCTL_OUT_CLEAR, &dwClearBits );
return rc;
}
// 读取位状态
int SPI_PinState( int fd, unsigned int* pPinState )
{
int rc;
unsigned int dwCurrPinState;
rc = ioctl( fd, EM9X60_GPIO_IOCTL_PIN_STATE, &dwCurrPinState );
if( rc == 0 )
*pPinState = dwCurrPinState;
return rc;
}
// 格式转换为电压值
float GetDeltaV( )
{
int i1;
unsigned int i2 = 0;
for( i1=0; i1<10; i1++ )
i2 += ADData[i1];
result = (i2/10) * DeltaV;
return result;
}
该应用方案程序的核心部分是数据处理函数int ReadAD( int ChNum ),该函数将模拟量读出并转换为浮点数格式,其相关处理代码如下:
int ReadAD( int ChNum )
{
unsigned int i1 = 0;
int i2, i3;
unsigned int dwPinState;
unsigned int CtrlBit;
// 将控制字转换为标准的12位
CtrlBit = (unsigned int)ChNum << 4;
SPI_OutClear( fd, SPI_CS );
// 等待转换完成
for( i2=0; i2<100; i2++ )
{
SPI_PinState( fd, &dwPinState );
if( dwPinState & SPI_EOC );
break;
}
// 转换失败处理
if( i2 >= 100 )
{
SPI_OutSet( fd, SPI_CS );
return -14;
}
// 第一次读出的是无效数据,读出并且扔掉
for( i2=0; i2<12; i2++ )
{
i1 = i1 << 1;
SPI_PinState( fd, &dwPinState );
if( dwPinState & SPI_DIN )
i1 = i1 | 0x01;
if( CtrlBit & 0x800 )
SPI_OutSet( fd, SPI_DOUT );
else
SPI_OutClear( fd, SPI_DOUT );
SPI_OutSet( fd, SPI_CLK );
SPI_OutClear( fd, SPI_CLK );
CtrlBit = CtrlBit << 1;
}
// 正式读取数据,读十次,交由后面的GetDeltaV( )函数取平均值并转换为电压
for( i3=0; i3<10; i3++ )
{
i1 = 0;
CtrlBit = (unsigned int)ChNum << 4;
for( i2=0; i2<100; i2++ )
{
SPI_PinState( fd, &dwPinState );
if( dwPinState & SPI_EOC );
break;
}
if( i2 >= 100 )
{
SPI_OutSet( fd, SPI_CS );
return -12;
}
for( i2=0; i2<12; i2++ )
{
i1 = i1 << 1;
SPI_PinState( fd, &dwPinState );
if( dwPinState & SPI_DIN )
i1 = i1 | 0x01;
if( CtrlBit & 0x800 )
SPI_OutSet( fd, SPI_DOUT );
else
SPI_OutClear( fd, SPI_DOUT );
SPI_OutSet( fd, SPI_CLK );
SPI_OutClear( fd, SPI_CLK );
CtrlBit = CtrlBit << 1;
}
ADData[i3] = i1;
}
SPI_OutSet( fd, SPI_CS );
GetDeltaV( );
return 1;
}
该方案的主流程如下:
int main( )
{
int i;
// 定义8个数据输入通道
int AIN[8] = {0x00,0x10,0x20,0x30,0x40,0x50,0x60,0x70};
fd = open( '/dev/em9x60_gpio', O_RDWR );
printf( 'open file = %d\n', fd );
// 初始化SPI端口
SPI_Init( fd );
// 嵌入式程序,总是无限循环执行
for( ; ; )
{
// 循环读取八个通道的数据
for( i=0; i<8; i++ )
{
ReadAD( AIN[i] );
printf( 'the result = %.2f V\n', result );
}
printf( '\n' );
sleep( 2 );
}
return 1;
}
- 相关推荐
- 热点推荐
- 嵌入式主板
-
多通道数据采集串扰问题怎么解决2024-07-02 4169
-
多通道数据采集系统的优缺点2024-07-01 3895
-
labview多通道数据采集与存储2020-11-10 38481
-
英创信息技术Linux主板多通道视频采集方案简介2020-02-12 2421
-
EM9460工控主板为例的串口扩展应用方案2019-10-27 3848
-
多通道数据采集方案2019-01-17 6430
-
ESM335x系列工控主板多通道数据采集方案2016-07-20 3772
-
基于FPGA的多通道数据采集系统设计2016-05-10 1030
-
多通道数据采集保存的例子2016-01-07 6556
-
多通道数据采集是什么概念?2012-06-04 4368
-
基于FPGA的多通道同步数据采集存储系统2010-12-27 1228
-
基于CVI的多通道数据采集系统2009-12-31 1260
全部0条评论

快来发表一下你的评论吧 !
