

英创信息技术GPIO控制SPI接口的AD芯片简介
描述
在实际应用中,英创的嵌入式工控主板经常需要与客户外部扩展的AD芯片相连。一般来讲AD单元的扩展有两种方法,一种是通过英创工控主板的精简ISA总线扩展,另一种则是通过同步串口的方法,如SPI、I2C接口,与AD连接。前一种方法所涉及的AD芯片一般具有并行接口,如MAX197等;而后一种方法的AD芯片则带有SPI或I2C接口。采用SPI或I2C接口的AD芯片,可使芯片的管脚数大幅减少,进一步使芯片本身的尺寸也大幅减小,从而大大扩展了这些AD芯片的应用范围。为了方便广大客户在英创的嵌入式工控主板上快速应用这类AD芯片,本文将介绍如何通过EM9160工控主板的GPIO信号来控制TI公司的带有SPI接口的TLC2543 AD芯片。
TI公司的TLC2543是一款支持11路模拟输入,量化分辨率12-bit的低成本AD芯片。EM9160是英创公司的一款预装Windows CE实时操作系统的高性价比ARM9工控主板产品。EM9160最多可支持16位方向可独立设置的GPIO,这些GPIO均可被用来作为同步串口接口SPI的信号。在本文以下部分,SPI信号方向都是以工控主板EM9160为参考的。4线制的SPI接口其接口信号包括:
1、SPI_CS:SPI片选信号,低电平有效;从EM9160输出,接到TLC2543
2、SPI_CK:SPI接口的同步时钟信号;从EM9160输出,接到TLC2543
3、SPI_DO:SPI接口数据输出,从EM9160输出的转换命令,输入到TLC2543
4、SPI_DI: SPI接口数据输入,从AD芯片输出的转换数据,输入到EM9160
用EM9160的GPIO仿真SPI接口的第一步是根据具体的设计情况,选择合适的GPIO信号来作为SPI的各个信号,用C代码可表述如下:
#include ‘em9160_dio_ex.h’
#include ‘em9160_isa_dio.h’
#define GPIO0_PIN 0x0001
#define GPIO1_PIN 0x0002
#define GPIO2_PIN 0x0004
#define GPIO3_PIN 0x0008
#define GPIO4_PIN 0x0010
#define GPIO5_PIN 0x0020
#define GPIO6_PIN 0x0040
#define GPIO7_PIN 0x0080
#define GPIO8_PIN 0x0100
#define GPIO9_PIN 0x0200
#define GPIO10_PIN 0x0400
#define GPIO11_PIN 0x0800
#define GPIO12_PIN 0x1000
#define GPIO13_PIN 0x2000
#define GPIO14_PIN 0x4000
#define GPIO15_PIN 0x8000
//
// 输入输出方向是以主板为参考来定义的。
//
#define SPI_CS_PIN GPIO0_PIN // 可根据实际情况更改
#define SPI_CK_PIN GPIO1_PIN // 可根据实际情况更改
#define SPI_DI_PIN GPIO2_PIN // 可根据实际情况更改
#define SPI_DO_PIN GPIO3_PIN // 可根据实际情况更改
第二步是实现SPI各个控制信号的操作函数,即各个控制信号的置位和清零以及输入状态的读入。通过调用EM9160_ISA_DIO.LIB中的相关GPIO函数,函数原型定义在头文件“em9160_dio_ex.h”中,可很容易实现下列函数:
/////////////////////////////////////////////////////////////////////////////
// SPI接口各管脚控制函数
/////////////////////////////////////////////////////////////////////////////
void Set_SPI_CS() // SPI片选置高,注意SPI_CS片选一般是低有效信号
PIO_OutSetEx( SPI_CS_PIN );
void Clear_SPI_CS() // SPI片选清零,注意SPI_CS片选一般是低有效信号
PIO_OutClearEx( SPI_CS_PIN );
void Set_SPI_CK() // SPI时钟置高,注意SPI_CK初始状态为低
PIO_OutSetEx( SPI_CK_PIN );
void Clear_SPI_CK() // SPI时钟置低,注意SPI_CK初始状态为低
PIO_OutClearEx( SPI_CK_PIN );
void Set_SPI_DO() // SPI数据输出高电平
PIO_OutSetEx( SPI_DO_PIN );
void Clear_SPI_DO() // SPI数据输出低电平
PIO_OutClearEx( SPI_DO_PIN );
int Get_SPI_DI() // 读取SPI数据输入电平,‘0’表示低电平,‘1’表示高电平
{
UINT16 uState;
PIO_StateEx( &uState );
if(uState & SPI_DI_PIN)
return 1;
return 0;
}
void Init_SPI() // 设置SPI接口各控制信号,只初始化阶段运行一次
{
Set_SPI_CS();
Clear_SPI_CK();
Clear_SPI_DO();
// 设置SPI_CS、SPI_CK、SPI_DO为数据输出
PIO_OutEnableEx( SPI_CS_PIN | SPI_CK_PIN | SPI_DO_PIN );
// 设置SPI_DI为数据输入
PIO_OutDisableEx( SPI_DI_PIN );
}
第三步就是根据SPI的时序,构造相应的读写函数。TLC2543是4线制SPI接口,因此它的读写操作是同时进行的,即所谓全双工串行数据传输。在构造函数时,需要仔细研究AD芯片数据手册上提供的SPI接口时序关系,如下图所示:
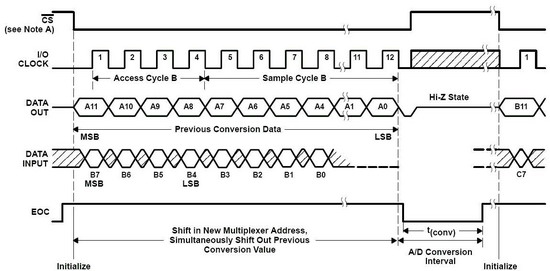
这里需要注意的有以下几点:
1、在SPI_CS片选有效后,TLC2543将把上次AD转换的数据,按MSB在先的顺序,呈现在SPI_DI信号线上,并在SPI_CK的下降沿更新数据
2、SPI_CK的上升沿将把对AD芯片的操作指令锁存到AD芯片,输出的数据也是按MSB在先的顺序
3、输入AD的操作指令只有8个bit,而从AD读出的转换数据有12个bit,在读入低4bit时,输入指令用“0”填充
4、芯片数据手册中串行输入输出数据与我们的定义SPI_DO和SPI_DI是正好相反的
根据上述时序构造的启动AD转换并读取上次转换结果的函数如下:
///////////////////////////////////////////////////////////////////////////////////////
// 输入参数uCmdCode:发送给AD芯片的转换命令,具体内容参考AD数据手册
// 输出参数pADData:从AD读取的数据,低12-bit有效
//////////////////////////////////////////////////////////////////////////////////////
BOOL ReadAD( UCHAR uCmdCode, UINT16* pADData )
{
int i1;
volatile UINT16 ui1, uCmd16;
// activiate AD chipselection
Clear_SPI_CS();
// wait 1.4us before clocking 1st bit (AD TLC2543 required)
EM9160_DelayInUs( 2 );
uCmd16 = (UINT16)uCmdCode 《《 4; // convert cmd to 12-bit format
ui1 = 0; // save shift-out data from AD
for ( i1 = 0; i1 《 12; i1++ ) // set coverting channel
{
ui1 = ui1 《《 1;
if(Get_SPI_DI()) // read AD_DOUT
ui1 = ui1 | 0x0001;
if( uCmd16 & 0x0800 ) // issue Cmd onto AD_DIN, MSB first
Set_SPI_DO();
else
Clear_SPI_DO();
EM9160_DelayInUs( 1 ); // insert delay if required
Set_SPI_CK(); // AD_CLK low-to-high
EM9160_DelayInUs( 1 ); // insert delay if required
Clear_SPI_CK(); // AD_CLK high-tolow
EM9160_DelayInUs( 1 ); // insert delay if required
uCmd16 = uCmd16 《《 1;
}
// assign ui1 to ADdata
*pADData = ui1;
// de-activiate AD chipselection
Set_SPI_CS();
// wait for next AD data ready if necessary
Sleep(1);
return TRUE;
}
在程序中最后的Sleep(1),是为了保证在下次调用函数时,AD的数据已转换完毕。应用程序也可采用其他方法来保证AD有足够时间,在应用程序再次调用ReadAD(…)前已完成数据转换。特别需要注意的是,第一次调用ReadAD(…)读取的数据是无意义的,因为此时还没有设置转换命令。在SPI输入输出过程中,是否加入适当的延时,主要是由AD芯片SPI接口的响应速度来决定的,客户可查看所选AD芯片,如TLC2543,的数据手册,就可获得正确的选择。
尽管本文是以EM9160为例来介绍如何构造SPI接口的,这个方法也完全适合英创公司的其他嵌入式工控主板产品,如EM9000、EM9161、EM9260、ETR232i等。对于不同的主板,主要的修改在第二步骤中对SPI接口信号操作函数的实现上。此外,英创公司还准备了3线制SPI接口以及I2C接口的范例参考代码,需要使用的英创用户可联系免费获得。
-
英创信息技术用GPIO实现多路外部中断及脉冲计数简介2020-02-11 2766
-
英创信息技术多路SPI从设备连接方法简介2020-02-07 4139
-
英创信息技术JAVA操作英创主板I2C接口简介2020-02-06 2611
-
英创信息技术EM9280主板SPI访问TLC2543 AD示例2020-01-17 3393
-
英创信息技术EM9280的GPIO特色及应用简介2020-01-15 1927
-
英创信息技术工控主板EM9160介绍2020-01-14 2144
-
英创信息技术工控主板EM9360的GPIO介绍2019-11-14 3436
-
英创信息技术SPI接口协议简介与分析2019-11-01 2441
-
英创主板JAVA应用开发简介2017-10-20 2547
全部0条评论

快来发表一下你的评论吧 !
