

Arduino EV J1772充电站的制作
电子说
描述
步骤1:设置ARDUINO Shield
构建和ARDUINO原始屏蔽。
我使用了Adafruit的Shield。 http://www.adafruit.com/products/55
将2 x 8pin和2x 6pin针座连接到外部孔。
将2 x 5mm 2针座的位置连接到继电器和J1772 Pilot的原型板上,/p》
步骤2:状态LEDs
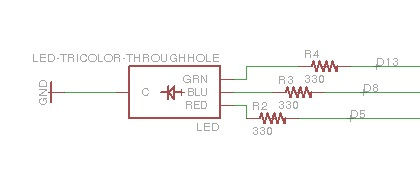
焊接通用阴极RGB LED到原型板和1 x 330欧姆电阻分别用于红色,绿色和蓝色。
将公共阴极接地。
焊接信号线:
红色-D5
蓝色-D8
绿色-D13
LED引线(Sparkfun的CC RGB LED)
蓝色-绿色-GND(最长引线)-红色
步骤3:继电器驱动器
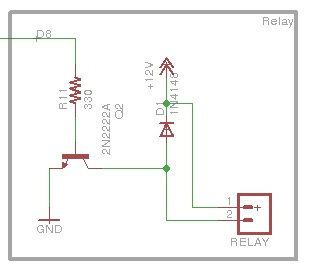
2N2222A NPN晶体管连接到R11(330欧姆),然后连接到D8(也连接到LED蓝色),GND和继电器输出。
第4步:先导DC/DC转换器
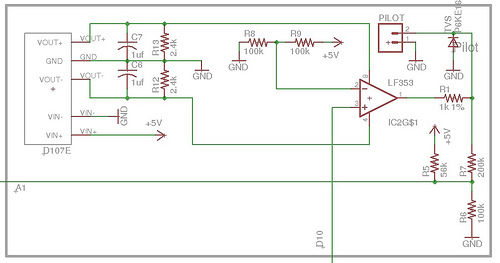
J1772 Pilot需要一个从-12V摆动到+ 12V的1khz信号。 MicroPower Direct的D107E DC DC转换器将5VDC转换为正12V和负12V。转换器需要最小的消耗,因此在每个输出到地面之间都要增加一个2.4k电阻和一个1uf电容器。我连接了MPD D107E,使5V和GND引脚与原型板上的中心5V和接地轨对齐
步骤5:试运行放大器
用于飞行员的运算放大器是LF353,从最后一步开始由DC/DC转换器供电。正+ 12V输出连接到引脚8,负-12V连接到引脚4。具有2个100K(R8和R9)电阻的分压器连接到LF353的+ 5V Gnd和引脚2。引脚3或运算放大器连接到Protoshield上的ARDUINO D10。输出,引脚1连接到1%1k ohm电阻,然后连接到引导输出。
P6KE16CA双向TVS二极管也连接到引导输出,然后
不使用引脚5、6和7。
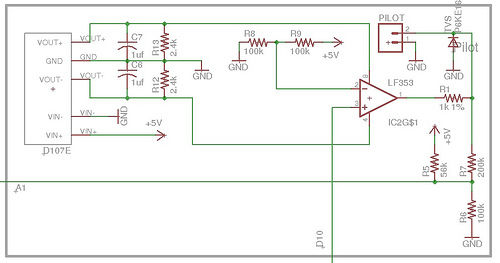
步骤6:先导电压测量
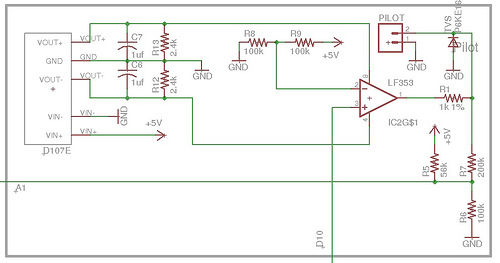
充电站和汽车与飞行员进行通讯。充电站必须读取电压才能正确响应。
1。将R5(56k)从5v焊接到Arduino Analog 1(A1)。
2。将R6(100k)从Gnd焊接到Arduino Analog 1(A1)。
3。将R7(200k)从先导输出焊接到Arduino Analog 1(A1)。
该电路通过提供一个分压器(R6和R7)将-12V缩小至-12V来工作。 R5提供了一个偏置来使电压保持正值,而Arduino不容忍模拟输入上的负电压。
步骤7:GFCI
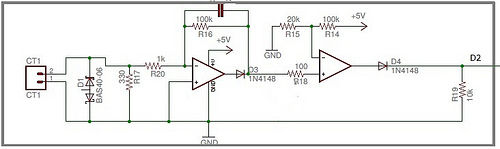
接地故障直通(GFCI)是重要部分充电站。 GFCI通过测量电流输出与电流输入之间的差异来工作。如果存在差异,则电路会跳闸。标准GFCI在5mA时跳闸,但是电动汽车需要一个不太敏感的跳闸点。大多数商业EVSE使用20mA。
该电路通过使用CRMagnetics(CR8420-1000-G)的接地故障电流互感器(CT)来工作。发生故障时,CT会产生较小的电压。来自CT的小电压首先在第一级中放大,然后在第二级中与参考电压进行比较。如果放大的CT电压高于参考电压,则运算放大器会变高,并导致Arduino在Arduino引脚D2上注册一个中断。
1。在另一个原型屏蔽板上焊接8针插座。
2。焊接电源线,将引脚4至5v和引脚8接地3。将二极管1N4148焊接到运算放大器输出引脚3和5。
运算放大器输出A
4。 CT线圈的焊接头引脚。
5。将齐纳二极管焊接到插头。
6。将330欧姆电阻R17焊接到插头。 (可以更改此电阻器的值以更改GFCI跳变点)
7。将R16从CT线圈接头焊接到Opamp引脚2
8。 R17,以及一个从运算放大器引脚2到引脚1上的二极管的0.1uf电容器。运算放大器输出B
9。将R15(20k)焊接到Gnd,将R14(100k)焊接到5V,将电阻连接在一起,然后连接到Opamp引脚6。
10。将Opamp输出引脚7二极管连接到10K电阻,将Arduino Digital 2(D2)连接到Arduino,将电阻的另一端连接到Gnd。
步骤8:加载EVSE固件
使用Arduino IDE将“ Open EVSE”固件加载到Arduino板上。
步骤9:RGB LCD(可选) )
如果Adruino和2个盾牌不高
根据adafruit网站上的指南进行组装。..
在Open EVSE代码中添加LCD代码。..
#include
#include
#define红色0x1
#define黄色0x3
#define绿色0x2
#define蓝色0x6t tlapsedTime;
void板上显示:Update()
{
uint8_t curstate = g_EvseController.GetState();
int i;
if(g_EvseController.StateTransition()){
switch(curstate){
case EVSE_STATE_A://未连接
lcd.setBacklight(GREEN);
lcd.setCursor (0,0);
lcd.print(“ EVSE Ready”);
lcd.setCursor(13,0);
lcd.print((int)g_EvseController.GetCurrentCapacity());
lcd.print(“ A”);
lcd.setCursor(0,1);
lcd.print(“ Not Connected”);
中断;
case EVSE_STATE_B://已连接/不收费
lcd.setBacklight(黄色);
lcd.setCursor(0,0);
lcd.print(“ EVSE Ready”);
lcd.setCursor(13,0);
lcd.print((int)g_EvseController.GetCurrentCapacity());
lcd.print(“ A”);
lcd.setCursor(0,1);
lcd.print(“正在等待EV“);
中断;
情况EVSE_STATE_C://正在充电
lcd.setBacklight(BLUE);
lcd.setCursor(0,0);
lcd.print(” Charging“ );
lcd.print((int)g_EvseController.GetCurrentCapacity());
lcd.print(“ A”);
break;
case EVSE_STATE_D://需要通风口
lcd .setBacklight(RED);
lcd.setCursor(0,0);
lcd.print(“ EVSE Error”);
lcd.setCursor(0,1);
lcd.print( “需要通风”);
中断;
情况EVSE_STATE_DIODE_CHK_FAILED:
lcd.setBacklight(RED);
lcd.setCursor( 0,0);
lcd.print(“ EVSE错误”);
lcd.setCursor(0,1);
lcd.print(“ DIODE CHK FAILED”);
中断;
case EVSE_STATE_GFCI_FAULT:
lcd.setBacklight(RED);
lcd.setCursor(0,0);
lcd.print(“ EVSE Error”);
lcd.setCursor(0,1 );
lcd.print(“ GFCI FAULT”);
break;
}
}
if(curstate == EVSE_STATE_C){
lcd.setCursor(0,1) ;
elapsedTime = now();
如果(hour(elapsedTime)《10){
lcd.print(“ 0”);
}
lcd.print(hour(elapsedTime) );
lcd.print(“:”);
如果(分钟(经过的时间)《10){
lcd.print(“ 0”);
}
lcd.print(分钟(elapsedTime));
lcd.print(“:”);
如果(second(elapsedTime)《10){
lcd.print(“ 0”);
}
lcd.print(second(elapsedTime));
lcd.print(“”);
}
}
步骤10:测试
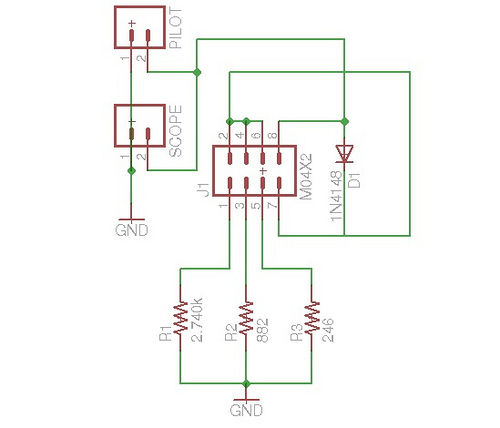
J1772 Pilot是1khz + 12V至-12V方波,电压定义状态,占空比定义可用的电流电动汽车EVSE设置占空比,而EV则增加了来自飞行员地面的电阻以改变电压。 EVSE读取电压并相应地更改状态。
状态先导电压EV电阻说明
状态A 12 N/A未连接
状态B 9 2.74k已连接
状态C 6882充电
状态D3 246需要通风状态E0不适用
状态F -12不适用EVSE错误
状态A -要测试状态A,请打开EVSE。 EVSE应该进入就绪状态。 LED应该亮绿色。
状态B -要测试状态B,请在EVSE供电的情况下,将电阻为2.74k Ohms的EV Simulator(或二极管和电阻器)连接起来。 EVSE应该进入EV已连接-EVSE就绪状态。 LED应该亮黄色。
状态C -要测试状态C,在EVSE供电的情况下,连接电阻为882欧姆的EV仿真器(或二极管和电阻器)。 EVSE应该进入EV已连接-EVSE就绪状态。 LED应该亮蓝色。
状态D-要测试状态D,请在EVSE供电的情况下,用246欧姆的电阻连接EV Simulator(或二极管和电阻器)。 EVSE应该转到所需的错误排放口。 LED应该亮红色。
状态E -要测试状态F,应断开EVSE的电源。 EVSE应该关闭,LED应该熄灭。
状态F -要测试状态F,在EVSE供电的情况下,将电阻为2.74k Ohms的EV仿真器(只是一个电阻器)连接起来。 EVSE应该转到错误二极管检查失败。 LED应该亮红色。
频率-飞行员的频率应该为1kHz(1000Hz)。可接受的J1772公差为980-1020Hz。通过在状态C“充电模式”下连接EV仿真器(或二极管和882欧姆电阻)来测试频率。从飞行员到EVSE地面连接万用表或示波器。
飞行员占空比-飞行员占空比取决于EVSE的最大电流设置。通过在状态C(充电模式)下连接EV仿真器来测试占空比。将示波器从飞行员连接到EVSE地面。占空比应与下图匹配。
上到51A安培=占空比x 0.6占空比=安培/0.6
51-80A安培=(占空比-64)2.5
占空比最大电流《3》 《3》误差《3》-7 %Digimatic Com Required
10%6A
20%12A
30%18A 《40》 24%24A 《50》 30A 《60》 36%《70》 42%42A 《80》 %48A
86%55A
88%60A
90%65A 《92》 92%70A
94%75A 《96》 80%
步骤11:高电压
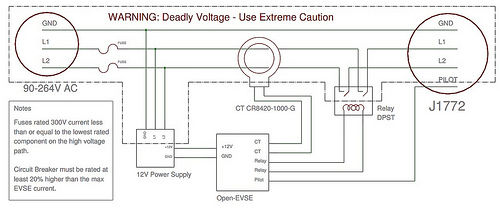
Arduino EVSE可以从6安培到80安培的任何J1772速率充电。我选择使用240V 30A J1772电缆以及30A继电器和L6-30扭锁插头。日产Leaf的最大充电速率为16 Amps,因此有足够的余量。
警告-如果您不合格,请不要使用240V电源。..
1。 L6-30剥去大约6英寸的外部绝缘层,露出热线(黑色),中性线/热线2(白色或红色)和接地线(绿色)。将每根线剥开并焊接或压接继电器的热线和中性线上的适当连接器。 (可选)如果需要为Ardrinos电源供电,请添加第二组电线。
2。通过去除约6英寸的外部绝缘层(露出4或5根电线)来准备J1772插头。如果存在用于接近的第五根导线,只需将其折叠并收缩包裹在其上,这样它就不会在充电站不需要的任何地方短路。剥去大约4根电线中的1/2英寸的火线(黑色),中性线/火线2(白色或红色),地线(绿色)和导向线(我的电缆上为橙色,但有些是蓝色的)。在火线和零线上进行继电器。
3。将所有接地线绑在一起。
4。将J1772电缆的火线和零线穿过电流互感器,然后将电线连接至继电器。
5。连接电源。注意电源必须是12V输出,输入应该是通用的(大约90-260V)。
6。将引路线连接到Arduino屏蔽引路输出。
7。将继电器线圈连接到屏蔽继电器输出。
8。将电源连接到Arduino。
步骤12:充电
在测试其充电时间之后。。..接通电源,然后再次测试。检查继电器,高压接线是否正确?
插入J1772,您的EV应该开始充电。
未来的计划。..清理低压电线,并将Arduino放在适当的外壳中。 p》
-
电动车快速充电站2013-03-03 4573
-
本田最新公共充电桩:单桩功率150Kw 超过特斯拉超级充电站2017-05-31 4304
-
小区充电站如何盈利?2018-09-19 5681
-
你对小区电动车充电站了解多少?2018-09-29 4805
-
小区充电站的知识介绍与使用说明2018-11-27 3648
-
社区建设小区充电站的好处2018-12-24 3702
-
如何对充电站电气系统进行测试?2021-05-10 2068
-
基于matlab粒子群算法优化充电站布局2021-09-14 2103
-
专家计划保护电动汽车充电站免受网络攻击2022-02-26 4270
-
如何设计高效、强大、快速的电动汽车充电站2022-11-09 1202
-
电动汽车的充电站介绍2022-11-14 1569
-
水冷充电站方案介绍2016-03-04 1230
-
带Wi-Fi监控的J1772电动汽车服务设备2021-11-29 1404
-
ev充电桩怎么使用 EV充电站类型2023-08-23 4030
-
Amphenol ER系列SAE J1772充电电缆及插座设计解析2025-12-10 622
全部0条评论

快来发表一下你的评论吧 !
