

如何在空中控制计算机
电子说
描述
第1步:所需材料
跳跃Motion支持Python,Java,C ++,C#,Javascript。在本教程中,我们将使用Java。
因此,在开始制作程序之前,我们需要查看此构建所需的材料:
1。飞跃运动控制器(在此处购买)
2。面向Java开发人员的Eclipse IDE(在此处下载)
3。 Leap Motion设置文件(在此处下载)
4。 Leap Motion SDK(在此处下载)
5。 Java SE 7(在此处下载)(下载JDK和JRE )
( * Leap Motion库仅适用于Java 6或Java 7 )
如果您不知道如何设置eclipse,那么我推荐此Java系列入门教程:在此处观看
好,现在让我们转到涉及的步骤创建程序。
步骤2:软件设置
跳跃运动支持多种编程语言,例如C ++,C#,Python,Java和Javascript。
在本教程中,我们将使用Java进行编程。
初始设置:
1。首先转到https://www.leapmotion.com/setup并下载Leap Motion设置文件,然后安装该应用程序。它会安装所有内容,以将the动控制器连接到您的计算机。
2。接下来转到https://developer.leapmotion.com/(开发人员门户)并创建一个帐户。然后下载Leap Motion SDK。
3。然后将zip文件中的所有文件提取到您选择的任何文件夹中。
配置类路径:
在此本教程将使用面向Java开发人员的Eclipse IDE。
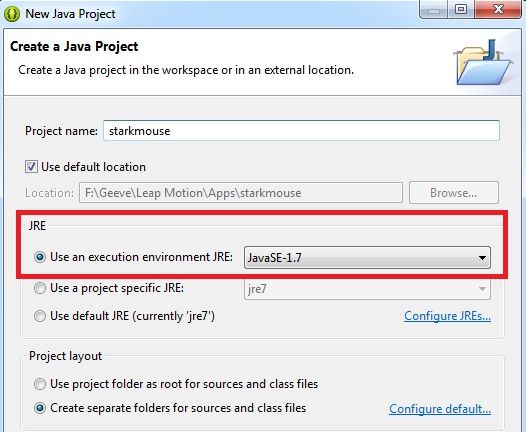
1。打开Eclipse,然后单击File》 New》 Java Project。
2。为项目命名,并确保将执行运行时环境JRE设置为Java SE 1.7,如图所示。
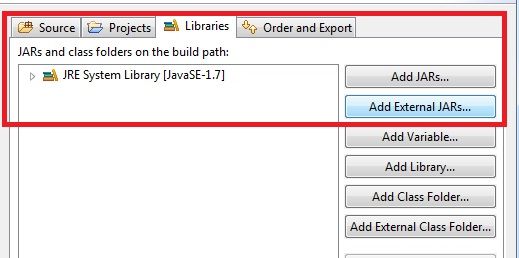
3。然后单击“下一步”,打开“库”选项卡,然后选择“添加外部JAR”并导航到先前提取的文件夹。
4。然后打开LeapSDK文件夹并转到libs文件夹并选择LeapJava.jar文件。
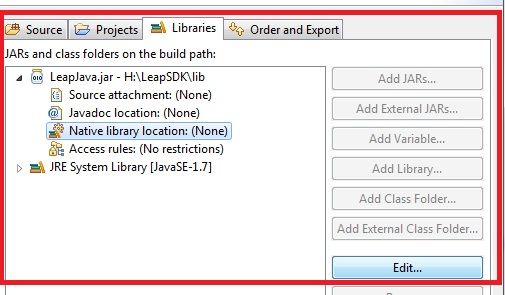
5。接下来,单击LeapJava.jar旁边的三角形下拉按钮,然后从“下拉菜单”中单击“本机库位置”,然后单击“编辑”,如图所示。
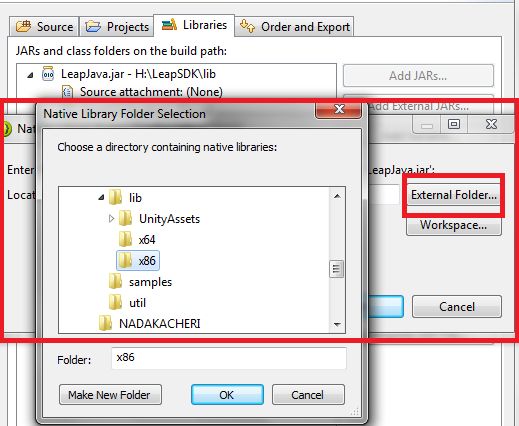
6。然后单击“外部文件夹”,然后导航到LeapSDK文件夹》 lib》,然后根据您的操作系统选择 x64 或 x86 文件夹,然后单击“确定”,然后单击“完成”。
我们现在在我们的项目中安装了LeapMotion,现在开始进行一些编码!
第3步:跳跃运动监听器
Now that we are done importing the libraries , let us start working on the project.
初始设置:
1。首先,我们需要在源文件夹中创建一个新类,单击项目文件夹旁边的三角形下拉箭头。
2。在您的项目文件夹中,右键单击src文件夹,转到new》,然后单击class创建一个新的Java类。
3。给班级起个名字,然后单击完成。
现在,让我们从代码开始:
1。首先,我们创建一个Leap Motion侦听器:(注意:导入必要的库),侦听的侦听器是何时将Jump Motion控制器连接到计算机的。
package starkmouse;
import java.io.IOException;
import java.awt.AWTException;
import java.awt.GraphicsDevice;
import java.awt.GraphicsEnvironment;
import java.awt.MouseInfo;
import java.awt.Point;
import java.awt.Robot;
import java.awt.event.InputEvent;
import java.awt.event.KeyEvent;
import com.leapmotion.leap.*;
import com.leapmotion.leap.Controller.PolicyFlag;
public class leapmoues {
public static void main(String[] args) throws AWTException {
Controller controller = new Controller();
controller.setPolicyFlags(PolicyFlag.POLICY_BACKGROUND_FRAMES);
SampleListener listener = new SampleListener();
controller.addListener(listener);
// controller.enableGesture(Gesture.Type.TYPE_SCREEN_TAP);
// controller.enableGesture(Gesture.Type.TYPE_SWIPE);
controller.enableGesture(Gesture.Type.TYPE_CIRCLE);
System.out.println(“Press Enter to quit.。.”);
try {
System.in.read();
} catch (IOException e) {
e.printStackTrace();
}
controller.removeListener(listener);
}
}
class SampleListener extends Listener {
boolean readyForControl = false;
int screenWidth;
int screenHeight;
boolean iBoxGet = false;
InteractionBox iBox = null;
Robot robot;
boolean isMoving = false;
boolean unGrip = false;
boolean wasFacingDown = true;
boolean wasInTabState = false;
boolean wasTabbing = false;
boolean justCircleGestured = false;
boolean isResizing = false;
public void onConnect(Controller controller) {
System.out.println(“Connected”);
GraphicsDevice gd = GraphicsEnvironment.getLocalGraphicsEnvironment()
.getDefaultScreenDevice();
screenWidth = gd.getDisplayMode().getWidth();
screenHeight = gd.getDisplayMode().getHeight();
System.out.println(“Screen Resolution: X: ” + screenWidth + “, H: ”
+ screenHeight);
readyForControl = true;
try {
robot = new Robot();
robot.setAutoDelay(5);
} catch (AWTException e) {
// TODO Auto-generated catch block
e.printStackTrace();
}
}
步骤4:帧和手势数据
跳跃运动帧数据,其中包括手势(圆形,捏,掌面朝下和所有其他手势)
跳跃运动有两个红外摄像机和三个红外LED。跳跃运动使用三个IR Led形成IR点图案,从而形成3D数据收集,IR相机拍摄称为帧的图片。帧从跳跃运动设备发送到计算机,我们可以对其进行编程。
跳跃运动使用复杂的数学分析图片和点定位,然后比较红外拍摄的两张图片的数据相机并使用两个2D表示形式获得3D表示形式。
跳跃运动设备以300 fps的速度捕获。然后,我们对发送到计算机的每个帧进行处理。
代码:
public void onFrame(Controller controller) {
Frame frame = controller.frame(); // The latest frame
// Frame previous = controller.frame(1); //The previous frame
// System.out.println(“Frame available”);
if (!iBoxGet) {
iBox = frame.interactionBox();
iBoxGet = true;
System.out.println(“Interaction box set!”);
}
// Pointable furthestFront = frame.pointables().frontmost();
Hand rightHand = frame.hands().rightmost();
Vector palmV = rightHand.palmVelocity();
// System.out.println(“Velocity: X: ” + palmV.getX() + “, Y: ” +
// palmV.getY()
// + “, Z: ” + palmV.getZ());
Vector palmN = rightHand.palmNormal();
// System.out.println(“Normal: X: ” + palmN.getX() + “, Y: ”
// + palmN.getY() + “, Z: ” + palmN.getZ());
Point mouseLoc = MouseInfo.getPointerInfo().getLocation();
int currentMouseX = mouseLoc.x;
int currentMouseY = mouseLoc.y;
if (readyForControl && rightHand.confidence() 》 .15) {
if (!isMoving && !wasInTabState && frame.hands().count() 》 1) {
Hand leftHand = frame.hands().leftmost();
if (leftHand.pinchStrength() 》 .8
&& rightHand.pinchStrength() 》 .8) {
if (!isResizing) {
System.out.println(“Resizing.。.”);
robot.keyPress(KeyEvent.VK_ALT);
robot.keyPress(KeyEvent.VK_SPACE);
robot.keyRelease(KeyEvent.VK_SPACE);
robot.keyRelease(KeyEvent.VK_ALT);
robot.keyPress(KeyEvent.VK_S);
robot.keyRelease(KeyEvent.VK_S);
robot.keyPress(KeyEvent.VK_DOWN);
robot.keyPress(KeyEvent.VK_RIGHT);
robot.keyRelease(KeyEvent.VK_DOWN);
robot.keyRelease(KeyEvent.VK_RIGHT);
isResizing = true;
}
}else{
if(isResizing){
System.out.println(“Resizing complete!”);
robot.mousePress(InputEvent.BUTTON1_MASK);
robot.mouseRelease(InputEvent.BUTTON1_MASK);
isResizing = false;
}
}
}
// System.out.println(“Confidence: ” + rightHand.confidence());
if (rightHand.grabStrength() 》 .99 && !wasInTabState && !isResizing) {
if (!isMoving && palmN.getY() 《 .8) {
robot.keyPress(KeyEvent.VK_ALT);
robot.keyPress(KeyEvent.VK_SPACE);
robot.keyRelease(KeyEvent.VK_SPACE);
robot.keyRelease(KeyEvent.VK_ALT);
robot.keyPress(KeyEvent.VK_R);
robot.keyRelease(KeyEvent.VK_R);
robot.keyPress(KeyEvent.VK_ALT);
robot.keyPress(KeyEvent.VK_SPACE);
robot.keyRelease(KeyEvent.VK_SPACE);
robot.keyRelease(KeyEvent.VK_ALT);
robot.keyPress(KeyEvent.VK_M);
robot.keyRelease(KeyEvent.VK_M);
robot.keyPress(KeyEvent.VK_DOWN);
robot.keyRelease(KeyEvent.VK_DOWN);
isMoving = true;
}
// System.out.println(rightHand.grabStrength());
}
else {
// System.out.println(“Not grabbing”);
if (isMoving) {
robot.mousePress(InputEvent.BUTTON1_MASK);
robot.mouseRelease(InputEvent.BUTTON1_MASK);
isMoving = false;
if (palmN.getX() != 0 && palmN.getY() != 0 && palmN.getZ() != 0) {
if (palmN.getY() 《 -.1 && palmN.getZ() 》 -.8) {
if (currentMouseY 《= 8) {
robot.keyPress(KeyEvent.VK_WINDOWS);
robot.keyPress(KeyEvent.VK_UP);
robot.keyRelease(KeyEvent.VK_WINDOWS);
robot.keyRelease(KeyEvent.VK_UP);
}
else {
if (screenWidth - currentMouseX 《= 12) {
robot.keyPress(KeyEvent.VK_WINDOWS);
robot.keyPress(KeyEvent.VK_RIGHT);
robot.keyRelease(KeyEvent.VK_WINDOWS);
robot.keyRelease(KeyEvent.VK_RIGHT);
} else if (currentMouseX 《= 12) {
robot.keyPress(KeyEvent.VK_WINDOWS);
robot.keyPress(KeyEvent.VK_LEFT);
robot.keyRelease(KeyEvent.VK_WINDOWS);
robot.keyRelease(KeyEvent.VK_LEFT);
}
}
} else {
System.out.println(“Normal: X: ” + palmN.getX()
+ “, Y: ” + palmN.getY() + “, Z: ”
+ palmN.getZ());
robot.keyPress(KeyEvent.VK_ALT);
robot.keyPress(KeyEvent.VK_SPACE);
robot.keyRelease(KeyEvent.VK_SPACE);
robot.keyRelease(KeyEvent.VK_ALT);
robot.keyPress(KeyEvent.VK_N);
robot.keyRelease(KeyEvent.VK_N);
}
}
}
}
if (!isMoving && !isResizing) {
if (palmN.getY() 《 -.8 && palmN.getZ() 》 -.5) {
wasFacingDown = true;
wasTabbing = false;
if (wasInTabState) {
robot.keyPress(KeyEvent.VK_ENTER);
robot.keyRelease(KeyEvent.VK_ENTER);
wasInTabState = false;
}
} else if (palmN.getY() 》= .8 && wasFacingDown
&& !wasInTabState) {
System.out.println(“Alt tabbing”);
wasFacingDown = false;
wasInTabState = true;
wasTabbing = false;
robot.keyPress(KeyEvent.VK_ALT);
robot.keyPress(KeyEvent.VK_CONTROL);
robot.keyPress(KeyEvent.VK_TAB);
robot.delay(100);
robot.keyRelease(KeyEvent.VK_TAB);
robot.keyRelease(KeyEvent.VK_CONTROL);
robot.keyRelease(KeyEvent.VK_ALT);
try {
Runtime.getRuntime().exec(
“cmd /c start ” + “C:WindowSwitcher.lnk”);
} catch (IOException e) {
// TODO Auto-generated catch block
e.printStackTrace();
}
robot.delay(300);
} else if (wasInTabState && !wasFacingDown && !wasTabbing
&& palmN.getY() 《 .45) {
wasTabbing = true;
} else if (wasInTabState && !wasFacingDown && wasTabbing
&& palmN.getY() 》 .75) {
robot.keyPress(KeyEvent.VK_TAB);
robot.keyRelease(KeyEvent.VK_TAB);
wasTabbing = false;
}
}
/*
* if (!isMoving && !wasInTabState) { /* if(palmN.getZ() 《= -.7 &&
* rightHand.grabStrength() 《 .1){
* System.out.println(“Palm vertical velocity: ” +
* rightHand.palmVelocity().getY()); //float resultVerticalV =
* Math.round(Math.abs(rightHand.palmVelocity().getY()) - 1);
* //if(resultVerticalV 》 0){ robot.mouseWheel((int)
* Math.round(((rightHand.palmVelocity().getY()) / 500))); //}
* }else{
*/
if (!isMoving && !wasInTabState && frame.gestures().count() 》 0
&& frame.hands().count() == 1 && !isResizing) {
CircleGesture circleGesture = new CircleGesture(frame
.gestures().get(0));
// System.out.println(“Pinch strength: ” +
// rightHand.pinchStrength());
if (circleGesture.durationSeconds() 》 .5 && !justCircleGestured
&& rightHand.pinchStrength() 》 .8) {
System.out.println(“Closed a window!”);
robot.keyPress(KeyEvent.VK_ALT);
robot.keyPress(KeyEvent.VK_F4);
robot.keyRelease(KeyEvent.VK_F4);
robot.keyRelease(KeyEvent.VK_ALT);
justCircleGestured = true;
}
} else {
justCircleGestured = false;
}
float xSpeed = (palmV.getX() / 6);
float ySpeed = (palmV.getY() / 6);
// System.out.println(“xSpeed: ” + xSpeed + “, ySpeed: ” + ySpeed);
robot.mouseMove((int) (currentMouseX + xSpeed),
(int) (currentMouseY - ySpeed));
// }
}
}
}
步骤5:完成代码!
package starkmouse;
import java.io.IOException;
import java.awt.AWTException;
import java.awt.GraphicsDevice;
import java.awt.GraphicsEnvironment;
import java.awt.MouseInfo;
import java.awt.Point;
import java.awt.Robot;
import java.awt.event.InputEvent;
import java.awt.event.KeyEvent;
import com.leapmotion.leap.*;
import com.leapmotion.leap.Controller.PolicyFlag;
public class leapmoues {
public static void main(String[] args) throws AWTException {
Controller controller = new Controller();
controller.setPolicyFlags(PolicyFlag.POLICY_BACKGROUND_FRAMES);
SampleListener listener = new SampleListener();
controller.addListener(listener);
// controller.enableGesture(Gesture.Type.TYPE_SCREEN_TAP);
// controller.enableGesture(Gesture.Type.TYPE_SWIPE);
controller.enableGesture(Gesture.Type.TYPE_CIRCLE);
System.out.println(“Press Enter to quit.。.”);
try {
System.in.read();
} catch (IOException e) {
e.printStackTrace();
}
controller.removeListener(listener);
}
}
class SampleListener extends Listener {
boolean readyForControl = false;
int screenWidth;
int screenHeight;
boolean iBoxGet = false;
InteractionBox iBox = null;
Robot robot;
boolean isMoving = false;
boolean unGrip = false;
boolean wasFacingDown = true;
boolean wasInTabState = false;
boolean wasTabbing = false;
boolean justCircleGestured = false;
boolean isResizing = false;
public void onConnect(Controller controller) {
System.out.println(“Connected”);
GraphicsDevice gd = GraphicsEnvironment.getLocalGraphicsEnvironment()
.getDefaultScreenDevice();
screenWidth = gd.getDisplayMode().getWidth();
screenHeight = gd.getDisplayMode().getHeight();
System.out.println(“Screen Resolution: X: ” + screenWidth + “, H: ”
+ screenHeight);
readyForControl = true;
try {
robot = new Robot();
robot.setAutoDelay(5);
} catch (AWTException e) {
// TODO Auto-generated catch block
e.printStackTrace();
}
}
public void onFrame(Controller controller) {
Frame frame = controller.frame(); // The latest frame
// Frame previous = controller.frame(1); //The previous frame
// System.out.println(“Frame available”);
if (!iBoxGet) {
iBox = frame.interactionBox();
iBoxGet = true;
System.out.println(“Interaction box set!”);
}
// Pointable furthestFront = frame.pointables().frontmost();
Hand rightHand = frame.hands().rightmost();
Vector palmV = rightHand.palmVelocity();
// System.out.println(“Velocity: X: ” + palmV.getX() + “, Y: ” +
// palmV.getY()
// + “, Z: ” + palmV.getZ());
Vector palmN = rightHand.palmNormal();
// System.out.println(“Normal: X: ” + palmN.getX() + “, Y: ”
// + palmN.getY() + “, Z: ” + palmN.getZ());
Point mouseLoc = MouseInfo.getPointerInfo().getLocation();
int currentMouseX = mouseLoc.x;
int currentMouseY = mouseLoc.y;
if (readyForControl && rightHand.confidence() 》 .15) {
if (!isMoving && !wasInTabState && frame.hands().count() 》 1) {
Hand leftHand = frame.hands().leftmost();
if (leftHand.pinchStrength() 》 .8
&& rightHand.pinchStrength() 》 .8) {
if (!isResizing) {
System.out.println(“Resizing.。.”);
robot.keyPress(KeyEvent.VK_ALT);
robot.keyPress(KeyEvent.VK_SPACE);
robot.keyRelease(KeyEvent.VK_SPACE);
robot.keyRelease(KeyEvent.VK_ALT);
robot.keyPress(KeyEvent.VK_S);
robot.keyRelease(KeyEvent.VK_S);
robot.keyPress(KeyEvent.VK_DOWN);
robot.keyPress(KeyEvent.VK_RIGHT);
robot.keyRelease(KeyEvent.VK_DOWN);
robot.keyRelease(KeyEvent.VK_RIGHT);
isResizing = true;
}
}else{
if(isResizing){
System.out.println(“Resizing complete!”);
robot.mousePress(InputEvent.BUTTON1_MASK);
robot.mouseRelease(InputEvent.BUTTON1_MASK);
isResizing = false;
}
}
}
// System.out.println(“Confidence: ” + rightHand.confidence());
if (rightHand.grabStrength() 》 .99 && !wasInTabState && !isResizing) {
if (!isMoving && palmN.getY() 《 .8) {
robot.keyPress(KeyEvent.VK_ALT);
robot.keyPress(KeyEvent.VK_SPACE);
robot.keyRelease(KeyEvent.VK_SPACE);
robot.keyRelease(KeyEvent.VK_ALT);
robot.keyPress(KeyEvent.VK_R);
robot.keyRelease(KeyEvent.VK_R);
robot.keyPress(KeyEvent.VK_ALT);
robot.keyPress(KeyEvent.VK_SPACE);
robot.keyRelease(KeyEvent.VK_SPACE);
robot.keyRelease(KeyEvent.VK_ALT);
robot.keyPress(KeyEvent.VK_M);
robot.keyRelease(KeyEvent.VK_M);
robot.keyPress(KeyEvent.VK_DOWN);
robot.keyRelease(KeyEvent.VK_DOWN);
isMoving = true;
}
// System.out.println(rightHand.grabStrength());
} else {
// System.out.println(“Not grabbing”);
if (isMoving) {
robot.mousePress(InputEvent.BUTTON1_MASK);
robot.mouseRelease(InputEvent.BUTTON1_MASK);
isMoving = false;
if (palmN.getX() != 0 && palmN.getY() != 0
&& palmN.getZ() != 0) {
if (palmN.getY() 《 -.1 && palmN.getZ() 》 -.8) {
if (currentMouseY 《= 8) {
robot.keyPress(KeyEvent.VK_WINDOWS);
robot.keyPress(KeyEvent.VK_UP);
robot.keyRelease(KeyEvent.VK_WINDOWS);
robot.keyRelease(KeyEvent.VK_UP);
} else {
if (screenWidth - currentMouseX 《= 12) {
robot.keyPress(KeyEvent.VK_WINDOWS);
robot.keyPress(KeyEvent.VK_RIGHT);
robot.keyRelease(KeyEvent.VK_WINDOWS);
robot.keyRelease(KeyEvent.VK_RIGHT);
} else if (currentMouseX 《= 12) {
robot.keyPress(KeyEvent.VK_WINDOWS);
robot.keyPress(KeyEvent.VK_LEFT);
robot.keyRelease(KeyEvent.VK_WINDOWS);
robot.keyRelease(KeyEvent.VK_LEFT);
}
}
} else {
System.out.println(“Normal: X: ” + palmN.getX()
+ “, Y: ” + palmN.getY() + “, Z: ”
+ palmN.getZ());
robot.keyPress(KeyEvent.VK_ALT);
robot.keyPress(KeyEvent.VK_SPACE);
robot.keyRelease(KeyEvent.VK_SPACE);
robot.keyRelease(KeyEvent.VK_ALT);
robot.keyPress(KeyEvent.VK_N);
robot.keyRelease(KeyEvent.VK_N);
}
}
}
}
if (!isMoving && !isResizing) {
if (palmN.getY() 《 -.8 && palmN.getZ() 》 -.5) {
wasFacingDown = true;
wasTabbing = false;
if (wasInTabState) {
robot.keyPress(KeyEvent.VK_ENTER);
robot.keyRelease(KeyEvent.VK_ENTER);
wasInTabState = false;
}
} else if (palmN.getY() 》= .8 && wasFacingDown
&& !wasInTabState) {
System.out.println(“Alt tabbing”);
wasFacingDown = false;
wasInTabState = true;
wasTabbing = false;
robot.keyPress(KeyEvent.VK_ALT);
robot.keyPress(KeyEvent.VK_CONTROL);
robot.keyPress(KeyEvent.VK_TAB);
robot.delay(100);
robot.keyRelease(KeyEvent.VK_TAB);
robot.keyRelease(KeyEvent.VK_CONTROL);
robot.keyRelease(KeyEvent.VK_ALT);
try {
Runtime.getRuntime().exec(
“cmd /c start ” + “C:WindowSwitcher.lnk”);
} catch (IOException e) {
// TODO Auto-generated catch block
e.printStackTrace();
}
robot.delay(300);
} else if (wasInTabState && !wasFacingDown && !wasTabbing
&& palmN.getY() 《 .45) {
wasTabbing = true;
} else if (wasInTabState && !wasFacingDown && wasTabbing
&& palmN.getY() 》 .75) {
robot.keyPress(KeyEvent.VK_TAB);
robot.keyRelease(KeyEvent.VK_TAB);
wasTabbing = false;
}
}
/*
* if (!isMoving && !wasInTabState) { /* if(palmN.getZ() 《= -.7 &&
* rightHand.grabStrength() 《 .1){
* System.out.println(“Palm vertical velocity: ” +
* rightHand.palmVelocity().getY()); //float resultVerticalV =
* Math.round(Math.abs(rightHand.palmVelocity().getY()) - 1);
* //if(resultVerticalV 》 0){ robot.mouseWheel((int)
* Math.round(((rightHand.palmVelocity().getY()) / 500))); //}
* }else{
*/
if (!isMoving && !wasInTabState && frame.gestures().count() 》 0
&& frame.hands().count() == 1 && !isResizing) {
CircleGesture circleGesture = new CircleGesture(frame
.gestures().get(0));
// System.out.println(“Pinch strength: ” +
// rightHand.pinchStrength());
if (circleGesture.durationSeconds() 》 .5 && !justCircleGestured
&& rightHand.pinchStrength() 》 .8) {
System.out.println(“Closed a window!”);
robot.keyPress(KeyEvent.VK_ALT);
robot.keyPress(KeyEvent.VK_F4);
robot.keyRelease(KeyEvent.VK_F4);
robot.keyRelease(KeyEvent.VK_ALT);
justCircleGestured = true;
}
} else {
justCircleGestured = false;
}
float xSpeed = (palmV.getX() / 6);
float ySpeed = (palmV.getY() / 6);
// System.out.println(“xSpeed: ” + xSpeed + “, ySpeed: ” + ySpeed);
robot.mouseMove((int) (currentMouseX + xSpeed),
(int) (currentMouseY - ySpeed));
// }
}
}
}
步骤6:运行程序和结果:
现在我们已经完成了对Leap Motion控制器的编程,我们可以在Eclipse中运行该程序了。
责任编辑:wv
-
工业控制计算机的特点 工业控制计算机的应用领域2024-06-16 2918
-
工业计算机是什么?如何在不同行业中使用?2024-04-01 2274
-
计算机通信的规则2023-05-09 3630
-
计算机的定义及分类2021-09-16 1907
-
计算机控制烤箱结构框图,计算机控制实验箱,计算机控制原理实验箱 精选资料分享2021-09-13 1810
-
计算机模糊控制的相关知识2021-09-10 1415
-
计算机控制技术简介2021-09-01 1439
-
什么是计算机系统、计算机硬件和计算机软件?2021-07-22 2484
-
计算机的组成原理是什么?2021-07-07 1221
-
计算机控制技术习题2009-01-14 857
-
计算机应用基础教案2008-09-25 1189
全部0条评论

快来发表一下你的评论吧 !
