

语音控制蓝牙汽车的制作图解
电子说
描述
步骤1:零件清单
1。 Arduino UNO/nano/micro/Mega
2。 HC05蓝牙模块
3个2.2K欧姆,4.7K欧姆电阻
4个面包板或焊接套件
5根导线
6个机箱
7 2 150/300 rpm BO电机,带2个轮子
8个螺钉和螺母
9个脚轮
10。电动机驱动器(:L293或L298)
11 12V电源
步骤2:在面包板上设置电路和设置机箱
现在Arduino nano是我的项目的大脑。您可以使用UNO/MEGA/微。然后我将使用蓝牙连接功能通过智能手机控制汽车。
所以我在Fritzing文件中提供了电路。下载Fritzing并打开它并查看文件。如图所示进行连接。使用2.2k和4.7k给出的分压器。现在,黄色电线(根据该摩擦文件)表示将控制电动机驱动器的4个输出。这4个逻辑电平实际上是电动机驱动器的输入,电动机驱动器使用该逻辑电平根据逻辑电平的馈送进行移动。 arduino控制。..。..意味着,它使驾驶员能够向前或向后或向后移动电动机,或者向右或向左移动电动机,或者只是停车。这是在代码中完成的。
因此,请参见上图,然后连接电动机驱动器输入。然后用几颗螺丝将输出端的电动机连接并固定车轮。我已经按照其连接方式连接了我的L293驱动程序。检查自己的驱动器,搜索网络和数据表,然后根据需要进行连接。
用螺钉固定电动机,并用双面胶带或简单胶带固定电动机驱动器和面包板。还要固定脚轮。您的底盘可能会有所不同,因此请仔细检查。安装轮子
步骤3:关于测试代码和App的工作原理
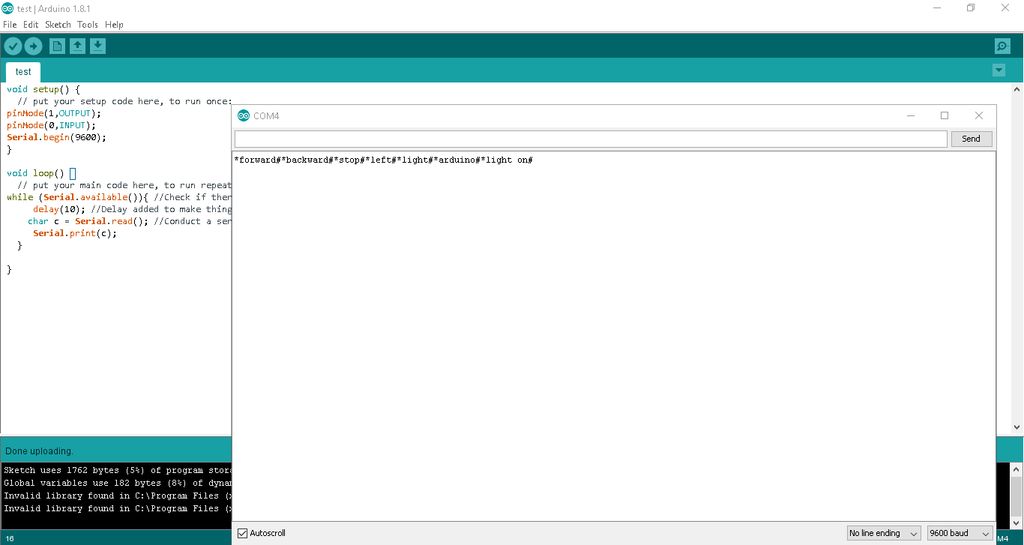
现在,语音功能实际上可以与蓝牙一起使用。有一个名为“ BT Arduino语音控制”的应用程序,链接为:https://amr-voice.en.aptoide.com/。将其下载并安装在android手机上,并与HC05配对。如果是第一次连接,请事先将其与1234或0000配对。如果没有配对,请重试。
现在,在几秒钟后在应用程序上讲话后,它会返回您在移动屏幕上刚刚说的内容。它实际上使用了Google语音。现在,您所说的内容通过蓝牙传输。上传时,上传Nano.remove RX TX线上给出的测试代码。上传后,重新插入。 HC05使用Serial.read()函数接受该数据,您可以使用Serial.print在串行监视器上看到刚才所说的内容。因此,您可以在此处检查应用程序的工作情况。在应用程序上说任何东西,然后查看串行监视器。我已经附上了有关将HC05与应用程序连接起来的所有分步截图。..在串行监视器上讲话和查看。看他们。如果您说转发,它将显示为* forward#。因此,使用此应用程序,我们可以处理在接下来的步骤中附加的代码。
步骤4:现在上传代码并附加电源
现在,我在此处上传了控制汽车的完整arduino代码。您可以下载它。
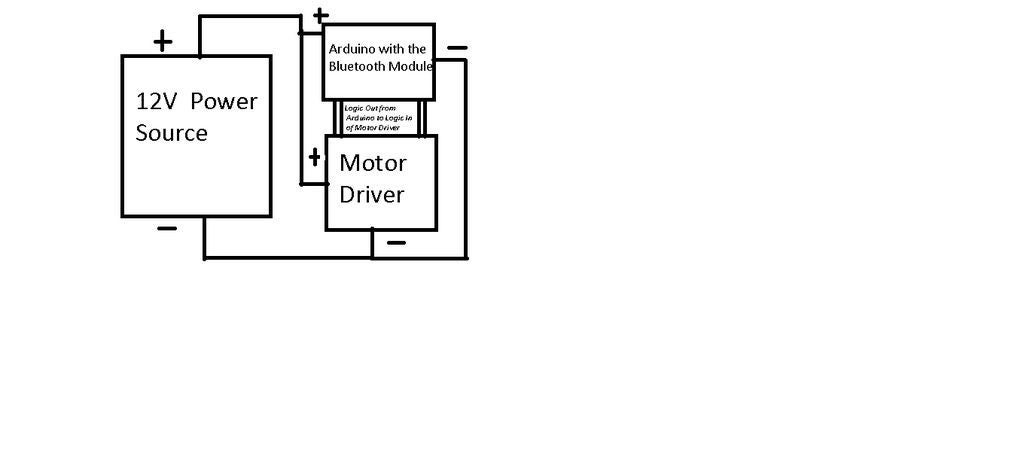
现在上传时。..请确保已断开RX TX线的连接。否则将不会上传。上传后,再次连接它们。现在连接一个12V电源。图中是一个方框图。
您可以随意更改任何单词,以更改我写为前进,后退,停止,左,右的字符串。您只需在应用程序上说出这个单词即可。
步骤5:最后
我之前已经描述了如何使用该应用。现在,向前,向后,向左,向右,停止说话,我在代码中使用了这些单词。您现在可以在else if语句中更改该字符串,然后再次上传。只需在该应用程序上说出该单词,它就可以正常工作。我还在引脚8处连接了一个LED。您可以添加更多的灯光或蜂鸣器或伺服器。
因责任编辑:wv
-
写字机的制作过程2023-09-27 1150
-
如何制作Arduino蓝牙控制的汽车2023-06-26 1064
-
如何使用LED和蜂鸣器制作图案2022-11-17 841
-
如何非常轻松地制作蓝牙控制的汽车2022-11-09 580
-
如何制作蓝牙控制的Arduino汽车2022-11-08 668
-
TYPE C板上16PIN贴片 侧面操作图解2022-01-06 2197
-
蓝牙耳机制作图解2019-08-23 27889
-
发电机模型制作图解2018-09-17 13404
-
创意小夜灯制作图解2018-09-07 15757
-
精选电子制作图解66例_门宏编著2015-07-30 1183
-
精选电子制作图解66例_门宏2012-04-27 3709
-
华为胶片制作图标库2009-06-24 918
全部0条评论

快来发表一下你的评论吧 !
