

模块化便携式传送带的制作
电子说
描述
步骤1:准备
步骤2 :使用工业组件的基本框架
使用工业组件的基本框架
建议构建基本结构请遵循先前文章中发布的“小型中试工厂的构建框架”中显示的步骤。在此项目中,在构建框架之前,必须在插槽内放置额外的16个(轴承12个,电机支架2个,控制箱2个)T型槽螺母。
下面列出了零件清单作为参考,因为您可以决定最终的几何尺寸(与所选轮廓的长度直接相关),还可以决定沿着传送带的车轴数量。
2020挤压铝制T型槽型材“长”
2020挤压铝制T型槽型材“短”
内部T型槽连接器90度角
8mm带轴承座球轴承
M5x8六角内六角螺钉
T型槽螺母
8mm线性轴
GT2同步带
NEMA 17步进电机
NEMA 17步进电机支架
M3x6六角内六角螺钉
GT2 5毫米16齿滑轮
GT2 8毫米20齿滑轮
1.5、2和4mm六角内六角扳手
第3步:运动传输
运动传输
该设计被认为具有尽可能少的复杂
机械元件,但是,需要两个特殊的非琐碎步骤:切割并连接正时皮带,该正时皮带将旋转从电动机传递到车轴,并制造输送带
自定义长度的时间带
如果看不到所需长度的时间带,则可以使用更大的时间带来构建自定义时间带,切割并重新拼接成所需的长度。在没有专用产品的情况下,最简单的方法是打磨或去除带子一端的一些牙齿,胶水与橡胶胶重叠(不要使用超级胶水,否则接头会太硬),允许胶水晾干至少1小时,然后用线和针缝制以加固关节。如果可能的话,在粘合之前使用同步皮带夹将两端正确对齐
要调整张力,请沿着轮廓移动电机/支架组,然后固定螺钉
定制的输送带
为避免使用其他张紧器,输送带必须使用高弹性材料,可以使用旧的橡胶轮胎内胎。如果可能的话,从汽车上(越大越好),这将提供比较小的(即从自行车)更规则和平坦的表面。另一个替代方法是“瑜伽”和“健身”中使用的橡胶阻力带,它更“美观”,但不那么坚固。
必须估计传送带的长度比两个传送带之间的距离短一些。最远的车轴,所以它会自动张紧。以大约45度的角度切割带子的端部,这样当关节接近轴时,带子的阻力较小,行进更平稳。要连接带子的两端,请使用橡皮胶(同样,不要使用超级胶水,否则接头会太硬)。
步骤4:使用ARDUINO进行速度控制
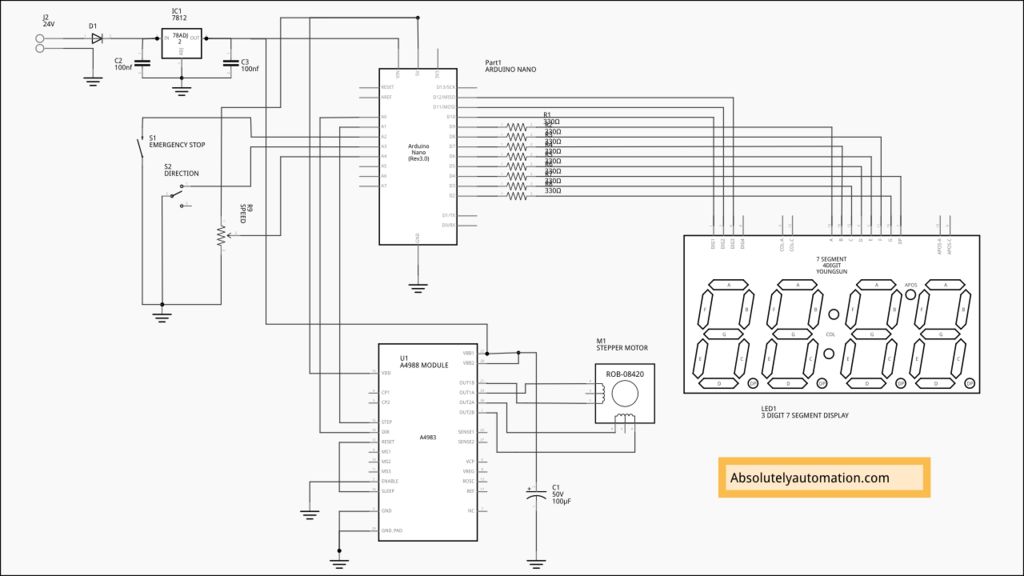
带有ARDUINO的速度控制
速度控制器能够为步进电机提供最大功率使用A4988模块的2安培电流。
3位7段多路复用显示,用于显示RMP和其他消息中的乐队速度。
li》
紧急停止按钮一旦按下,释放状态的唯一方法就是机械解锁开关并将控制速度设为0。
速度控制范围从0到300 RPM左右
旋转选择器的方向
该电路建立在通用PCB上,
要为系统供电,必须施加14到26 V的电压,以将其插入输送机侧面的塑料盒中。 ,并再次保护极性反转。添加了用于RS-485芯片的插座,并将其连接到RX和TX引脚,以用于将来扩展以进行远程控制。
步骤5:测试和结论
测试和结论
塑料瓶盖用作乐队的测试对象。如果
您需要移动较重或较高的物体,则必须添加更多的轴以提高稳定性。
要提高牵引力,请在轴上添加一些“粘性”材料由电动机驱动。热缩管是一个很好的选择
在非常低的RPM上,观察到相当大的振动。当脉冲序列频率接近其自然共振频率时,步进电机就会出现这种现象。电动机和支架之间必须使用某种减震材料。
所用电动机的最大电流为1.2安培,因此A4988模块中的电流限制将其设置为1 A,因为这是在不使用附加冷却系统的情况下的最大推荐值。
为更有效地紧急停止,常闭(NC)
开关的端子可以与电动机的电源串联,因此,如果Arduino由于某种原因未能停止电动机,则运动将因缺电而停止。
使用Arduino tone()函数向A4988模块发送脉冲,因此可能的最低频率约为30 Hz。
责任编辑:wv
-
便携式示波器的技术原理和应用场景2024-10-24 3867
-
#电工 传送带模块jf_09391732 2023-02-18
-
如何用Labview做传送带动画2014-06-05 4733
-
怎样去设计基于单片机的传送带计数系统2021-11-25 1015
-
如何实现单片机货物传送带检测设计2022-01-19 1128
-
模块化结构在便携式设备设计中的应用2009-11-30 1273
-
通过YMD系列超级节能变频器实现传送带的节能设计2018-10-25 3574
-
怎样在RobotStudio制作带有物理属性的传送带2018-11-01 15028
-
橡胶传送带破损划伤可以修复再使用吗2021-03-23 1524
-
便携式LED灯制作2022-07-28 972
-
矿山传送带导向辊轴承位磨损的修复指南2022-09-23 617
-
制作便携式PONG游戏2023-02-06 679
-
西门子1200PLC 传送带控制程序编写及思路2023-03-30 6751
-
STL检测传送带传送方向的示例2023-08-12 2090
-
英国真尚有非接触测速传感器LP-DS100传送带速度测量2025-02-26 1030
全部0条评论

快来发表一下你的评论吧 !
