

如何制作线跟随机器人
电子说
1.4w人已加入
描述
步骤1:物料计划
对于本教程,我们需要以下项目:
1。 Arduino UNO
2。 2WD智能汽车底盘2轮
3。 Arduino微型直流电机驱动器双H桥PW控制(L293D)
4。红外线路跟踪传感器(4位)
5。电池
6。双面胶带
7。导线
8。跳线
9。黑色胶带
步骤2:硬件安装
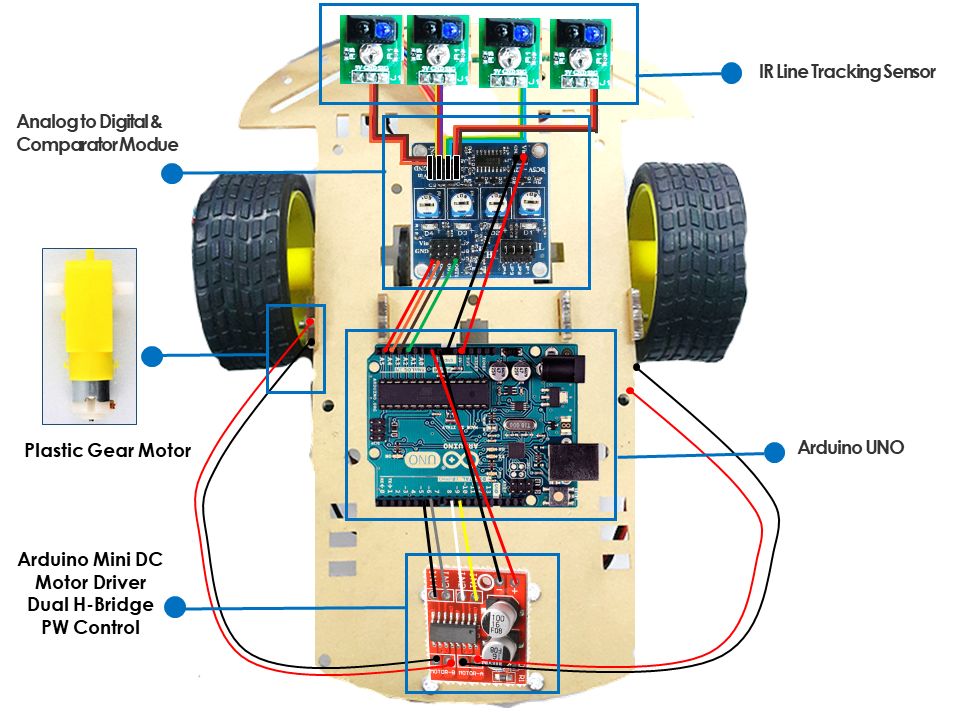
1。组装2WD Smart Car Chasis 2车轮
2。将红外传感器连接到模数和比较器模块
IN1》红外传感器1
IN2》红外传感器2
IN3》红外传感器3
IN4》红外传感器4
3。然后,将输出引脚连接到Arduino UNO模拟引脚
OUT1》 A2
OUT2》 A3
OUT3》 A4
OUT4》 A5
4。在Arduino UNO中将Vin连接到5V,将GND连接到GND
5。然后,将电机驱动器引脚连接到Arduino UNO引脚
IN1》 D10
IN2》 D9
IN3》 D6
IN4》 D5
6。将两个电动机都连接到电动机驱动器上
电动机A》右电动机
电动机B》左电动机
完成连接后,使用以下命令将Arduino连接到电源USB电缆。
步骤3:插入源代码
1。下载测试代码并使用Arduino软件或IDE打开它。
2。确保已选择正确的板和相应的端口。 (在本教程中,使用的是Arduino Uno)
3。然后,将测试代码上传到Arduino Uno。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
- 相关推荐
- 热点推荐
- 机器人
-
DIY简单的线跟随机器人2023-06-14 626
-
基于Arduino Nano的PID线路跟随机器人2022-12-23 1162
-
基于PID的线跟随机器人2022-12-16 666
-
线跟随机器人开源硬件2022-12-15 905
-
使用Pico的线跟随机器人2022-11-15 1047
-
PID控制线跟随机器人2022-11-14 868
-
如何制作Arduino人类跟随机器人2022-11-10 1244
-
最简单的线跟随机器人2022-11-08 614
-
如何使用Arduino制作跟随机器人2022-10-31 1128
-
如何使用AVR单片机构建一个线跟随机器人2022-09-08 1730
-
制作一个带有PID控制器的线跟随机器人2022-08-29 1793
-
线跟随机器人开源项目2022-08-16 692
-
线跟随机器人如何导航?2022-06-22 1023
全部0条评论

快来发表一下你的评论吧 !
