

3D打印四足机器人的制作
电子说
描述
步骤1:机箱的设计
机箱的设计应确保施加在电机上的最大扭矩
在电动机的额定范围内。
在设计机箱时要记住的主要参数是:
1。股骨长度
2。胫骨长度
3。估计的重量(保持在较高的一侧)
4。所需间隙
由于这是硬件,因此必须采取足够的间隙。我到处都使用了自攻螺丝。所以我的设计中确实有线程。用3D打印机制作小螺纹并不是一个好主意。您可能必须先打印小零件,以便在最终裁切之前检查间隙。仅当您像我这样没有足够的经验时,才需要执行此步骤。
如果您想进一步控制四足动物的运动。步态设计也应纳入方程式。因为这是我的第一个项目,所以我稍后才意识到这一点。
步骤2:3D打印机箱
我3D打印了PLA的机箱(Poly乳酸)。打磨零件以获得足够的间隙。然后按照我的设计,用伺服器组装所有零件。请记住,您的所有伺服器都是同一制造商,因为不同的制造商可能具有不同的设计。这发生在我身上。因此,请事先检查。
步骤3:操作电路

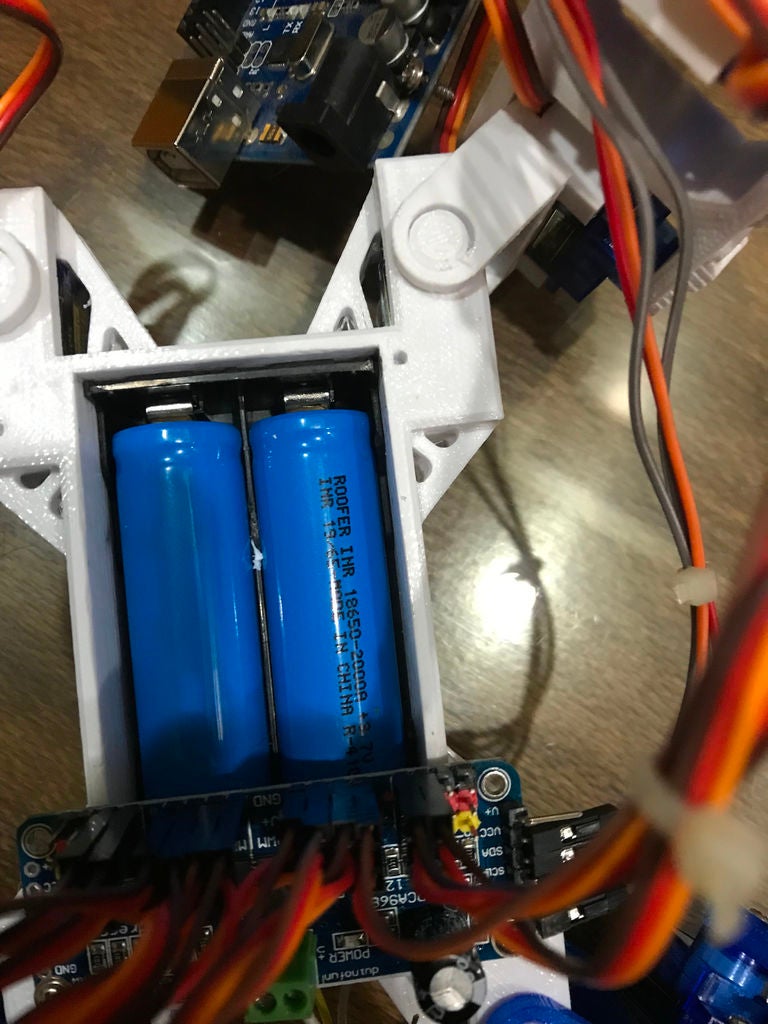
我正在使用Arduino UNO和适用于我的机器人的16通道伺服控制器。您可以在网上轻松找到它们。相应地连接引脚。您需要编写伺服引脚与哪个引脚的连接。否则以后会引起混乱。将电线捆扎在一起。我们很高兴。
对于电池,我提供了两个高电流放电的LiPo电池(3.7V)。我将它们并联连接,因为伺服的最大输入为5v。
第4步:对四足动物进行编码
尽管开始时看起来很困难,但以后会变得更容易。步态设计是您编写代码时要记住的。请记住以下几点:
1。在任何时候,四足动物的重心都必须在双腿形成的区域内。
2。角度应从设定参考中获取。这取决于您的设计以及您希望如何移动双腿。
3。我使用的是180度伺服电机,而不是齿轮减速电机,因此您在固定伺服电机时已进行了检查
关于代码的说明,此链接就足够了:
https://makezine.com/2016/11/22/robot-quadruped-ar 。..
这些是我的代码
第5步:几何计算
角度是通过三角学计算的:
1。您首先找到2D腿长
2。然后检查机器人的仰角
有了这两个约束,您可以轻松计算出伺服系统的角度。
写我已经编写了前进代码。我将在以后再次尝试时更新代码。
步骤6:进一步改进
我将为控件添加一个蓝牙(BLE)模块
感谢您查看我的项目,欢迎有任何疑问。
-
什么是龙人四足机器人?2016-03-24 9113
-
物联网、AR、3D打印、机器人未来将改变我们的生活?2017-10-19 3041
-
四足机器人2018-09-29 10764
-
【四足机器人】SOLO技术详解--(1)介绍(2)平台和机器人概述【翻译】精选资料分享2021-09-13 2162
-
四足机器人的机构设计2021-09-15 2181
-
DIY设计四足蜘蛛机器人2022-08-09 2155
-
基于Arduino的3D打印2轮机器人2022-08-12 4076
-
基于3D打印技术的跳舞机器人的硬件电路制作2018-03-27 5291
-
3D打印构建“折纸”机器人抓手2019-03-20 6128
-
3D打印软体机器人助力3D打印技术发展2019-06-20 3949
-
3D打印四足机器人的制作教程2019-08-19 6776
-
3D打印四足机器人的制作图解2019-09-04 7179
-
Buddy:3D打印的Arduino社交机器人2022-11-01 1885
-
用3D打印机和4足蜘蛛机器人制作伺服电机2022-12-09 1120
-
带有Arduino、乐高和3D打印部件的DIY双足机器人2023-06-27 1872
全部0条评论

快来发表一下你的评论吧 !
