

怎样将ESP8266 WiFi板连接到RoboRema App
电子说
描述
步骤1 :编码草图
下载草图并将此代码复制到Arduino IDE。
查看* ssid =“ RoboRemo”是否适合您的需求或进行更改。 (不要使用您本地网络中的SSID)
如果要通过* pw
通过工具选择 =》 放置右面板(Wemos D1 mini)
步骤2:设置COM端口
查看已连接的端口(端口:)。
用microUSB电缆连接ESP8266(Wemos mini)。
选择最后添加的COM端口。上传草图。
步骤3:建立连接
要在ESP8266和RoboRemo之间建立连接,需要执行两个步骤。
1 设备WiFi
我们是用ESP8266制作的一个Wifi服务器。因此,您必须将设备-WiFi-设置设置为RoboRemo或可能的名称。因此,请从您的设备转到WiFi设置。
2 RoboRemo connect
从RoboRemo -app:
菜单 =》 连接 =》 Internet(TCP) =》 其他 =》填写IP地址。在scetch中给出:192.168.0.1:1234
WiFi IP将被记住,因此下次您可以轻松单击正确的IP。
如果有问题,必须从串行监视器获取IP。
Arduino =》 工具 =》 串行监视器。
重置ESP8266或重新连接。
等待直到给出IP。
可以在Arduino草图中更改IP。例如,在教室里有更多ESP。
步骤4:设置RoboRemo应用界面
现在,正确的程序正在运行ESP8266和连接已建立,我们可以设置用于控制IO引脚的按钮。
有关更多说明,请下载l RoboRemo手册
选择:
菜单 =》 编辑用户界面 =》点击屏幕上的任意位置(弹出新菜单)=》选择按钮 =》拖动按钮(在左上角拾起)到您想要的位置=》如果需要,请调整按钮的大小(在底部右角)。
点击按钮,以便显示菜单=》点击“ 设置按动” =》输入 A =》标签确定。 =》点击“ 设置释放操作” =》输入 1 =》选项卡“ 确定”
通过颜色,文本等自定义按钮。
保留此按钮菜单。
选中“ 菜单”按钮。 =》选择“ 不要编辑ui ”。
现在必须可以打开和关闭LED_BUILDIN !!!!
第5步:自定义您的应用程序和草图
如果我提供的基础运行良好,则可以自定义并扩展您的应用程序和草图。
此草图的限制是我使用一个字符的突击队。因此,大于9的数字将无法发送。
如果您愿意,可以在RoboRemo网站ESP8266-wifi-car上提取草图并对其进行调整。
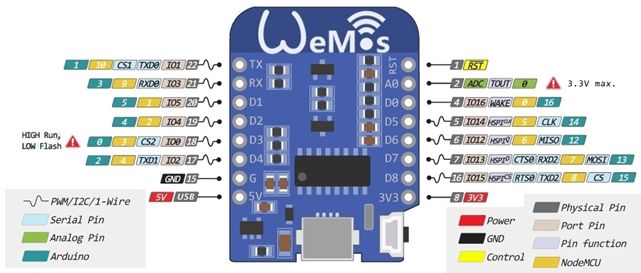
Arduino GPIO编号可以与Wemos或NodeMCU引脚号不匹配。在图片上查找以进行翻译或下载PDF
责任编辑:wv
-
esp8266wifi模块怎么连接手机2024-08-19 8916
-
CC2530采用ESP8266与手机APP通信2023-05-23 5016
-
如何将ESP8266连接到Google表格?2023-05-08 517
-
怎样才能让所有的ESP8266可以同时通过WiFi连接到ESP32呢?2023-03-01 471
-
esp8266是如何连接到wifi的?2023-02-23 565
-
使用ESP8266将STM32F103C8连接到互联网的方法2022-10-28 13741
-
配置esp8266开发板的Arduino开发环境2021-12-08 1690
-
APP同过ESP8266与51单片机通信2021-11-11 1410
-
ESP8266 wifi模块开发汇总2021-11-05 2753
-
普中WIFI ESP8266模块的详细资料合集免费下载2020-03-03 3682
-
怎样使用ESP8266 Flasher和Programmer烧写ESP8266 AT固件2019-11-18 22724
-
如何使用ESP8266和Android控制继电器2019-07-30 28345
-
如何设计和开发PCBESP8266WiFi模块2019-07-29 11648
全部0条评论

快来发表一下你的评论吧 !
