

智能窗帘的制作方法
电子说
描述
步骤1:所需组件:
Intel Galileo x 1
Intel Galileo x 1的电源线
USB电缆x1
LDR x 1
220ohm电阻x 1
8.2Kohm电阻器x 1
蓝牙模块(HC-05)x 1
9V电池x 1
9V电池适配器x 1
直流电动机x 1
电动机驱动器x 1
迷你-面包板x 1
连接线(公对公) )x 40
连接线(公对母)x 40
步骤2:将LDR和220ohm电阻与Intel Galileo接口

LDR
LDR扩展为光敏电阻。根据投射到LDR表面的光强度,它会改变其电阻值。电阻值从充足光照条件下的几欧姆变为黑暗条件下的几兆欧姆。
220ohm电阻器
此固定电阻器用于构建分压器电路。使用正确的电阻器可以帮助获得该项目所需的灵敏度。
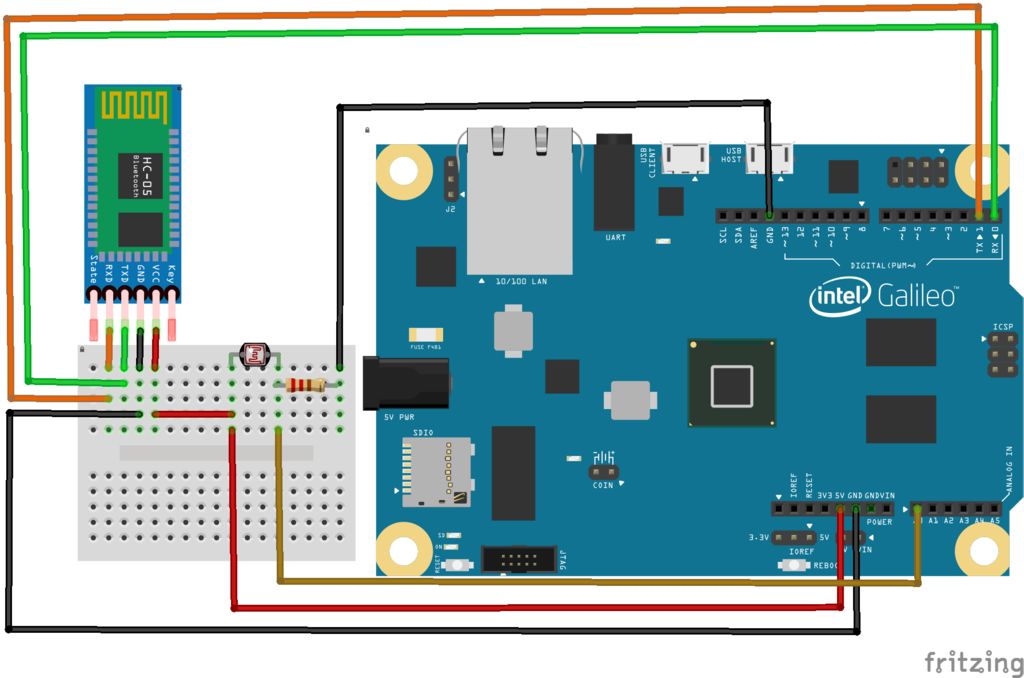
电路连接:
从5V引脚连接MM跳线英特尔Galileo到迷你面包板的垂直线之一。
将LDR的一个引脚插入连接5V引脚的同一垂直线上,而LDR的另一端插入面包板的任何其他垂直线上。
将8.2 Kohm电阻的一个引脚插入与LDR另一引脚相同的垂直线。
将电阻器的另一个引脚插入任何其他垂直线。
将M-M跳线从电阻器的另一个引脚连接到Intel Galileo的GND。
将Intel Galileo的A0引脚连接到LDR引脚和220欧姆电阻器引脚的连接点。
步骤3:连接HC-05蓝牙带有Intel Galileo的模块
HC-05蓝牙模块:
这是一个无线通信模块,可以串行传输数据。常规分线板随附的六个引脚中,仅使用了四个引脚。 HC-05的VCC引脚连接到+ 5V,而GND引脚连接到微控制器的GND。 RX引脚表示接收器,TX引脚表示发送器。这些引脚用于蓝牙和微控制器之间的通信。
注意:HC-06蓝牙模块也可以代替HC-05用于该项目。
电路连接:
将HC-05放在面包板上。
将M-M跳线从HC-05的VCC引脚连接到提供+ 5V的垂直列。
将M-M跳线从HC-05的GND引脚连接到Intel Galileo的GND引脚。
将M-M跳线从HC-05的TX引脚连接到Intel Galileo的引脚0。
将MM跳线从HC-05的RX引脚连接到Intel Galileo的引脚1。
步骤4:连接电机驱动器(L293D)使用Intel Galileo
电机驱动器:
电机驱动器是有助于操作的模块通过提供除微控制器以外的独立电源,以可变速度安装某些电动机。这样可以保护微控制器/微处理器免受电动机引发的电流冲击。该模块包含一个公共的3公头,分别对应+ 9V/+ 12V,GND和+ 5V。 + 9V或+ 12V电源用于为电动机供电。 + 5V用于操作L293D IC。该电机驱动器模块最多可处理2个电机。对于每个电动机,两个引脚用于接收来自微控制器/微处理器的信号,两个引脚用于连接直流电动机。
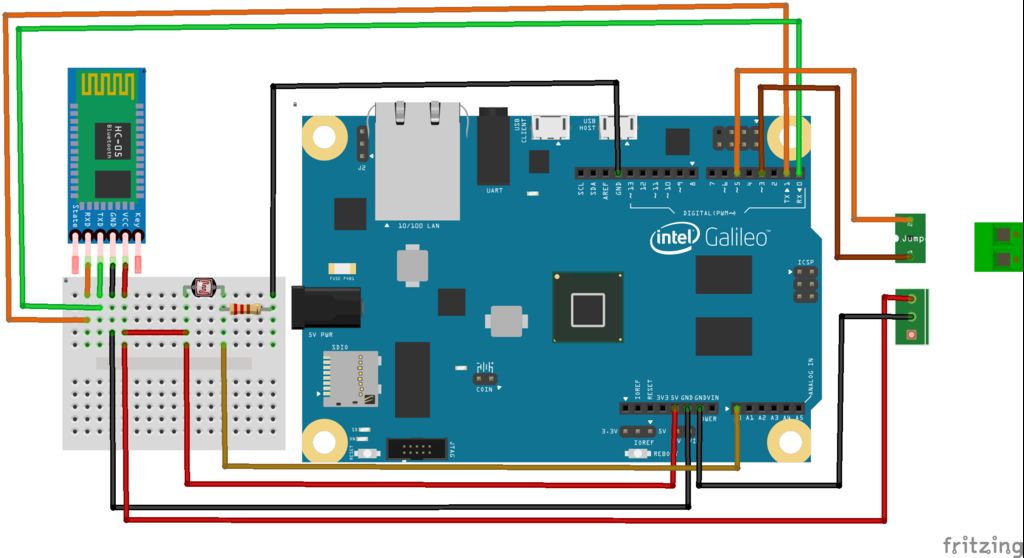
电路连接:
将M-F跳线从Intel Galileo的引脚3连接到电机驱动器的“ M1.a”引脚。
将M-F跳线从Intel Galileo的引脚5连接到电机驱动器的“ M1.b”引脚。
将一条M-F跳线从Intel Galileo的GND引脚连接到电机驱动器的GND引脚。
将MF跳线从电动机驱动器的+ 5V连接到提供+ 5V电源的垂直列。
步骤5:连接直流电使用Intel Galileo的电动机到电动机驱动器
直流电动机:
这是低转速的直流电动机。这些电动机包含两根导线,使电动机可以沿顺时针方向或逆时针方向旋转。
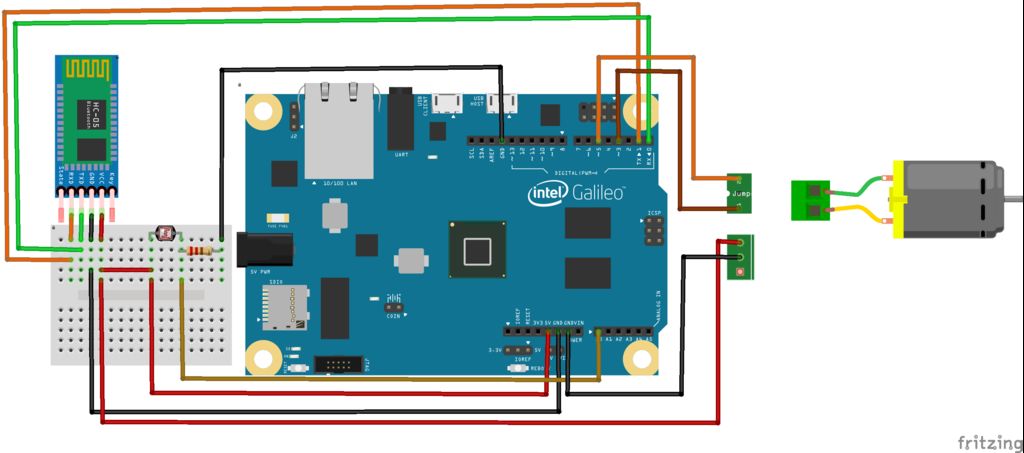
电路连接:
连接通过将两条电动机导线插入指定位置的电动机驱动器模块,将电动机连接到电动机驱动器。
步骤6:连接9V电池
9V电池
9V电池用于为项目中使用的直流电动机供电
9V电池适配器
9V电池适配器可帮助您将面包板上的电源引脚轻松插入。
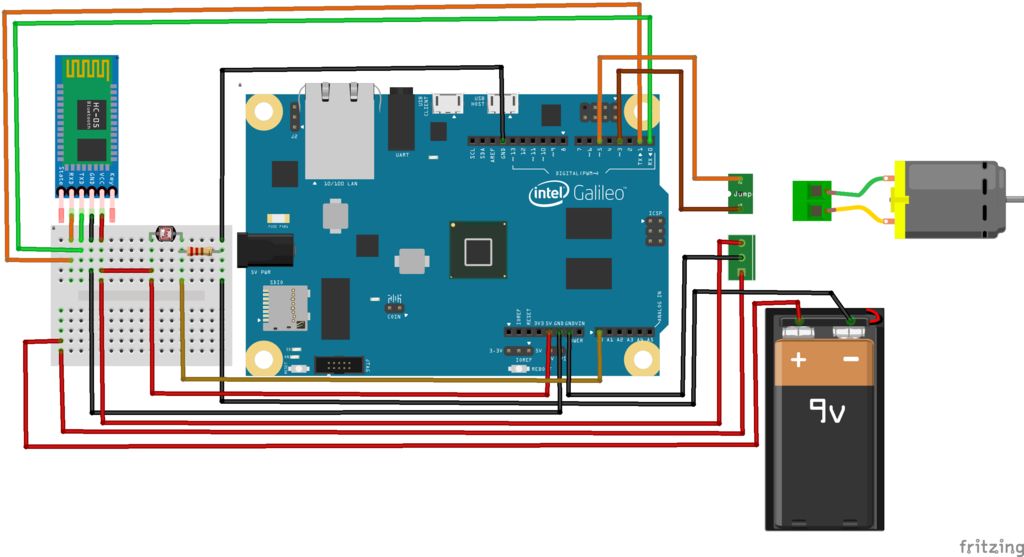
电路连接:
将9V电池适配器与9V电池相连。
将电池的-ve连接到垂直列,其中220ohm电阻器连接到Intel Galileo的GND。
将电池的+ ve连接到任何自由的垂直列。
将M-F跳线从同一垂直列连接回电动机驱动器模块的+ 9V/+ 12V引脚。
注意::在使用其他电源时,请确保已达成共识。否则,可能会发生电源问题,可能会导致设备出现故障。
步骤7:上传Arduino Sketch
步骤8:安装Android应用
下载并安装以下Android App,然后按照说明进行操作
打开“蓝牙设置”,然后将手机与HC-05配对。 (密码为“ 1234”)
打开应用。
点击“连接”按钮,然后选择“ HC-05”。现在,它应该显示为“已连接”。
现在,您可以通过手机控制窗帘了!
第9步:施工参考图像
-
智能水龙头的制作方法2022-11-01 922
-
电子叮咚门铃的制作方法2022-08-11 1038
-
一款电动窗帘制作方法分享2021-05-20 2613
-
纯直流混血功放制作方法2021-04-08 1247
-
遥控光盘鼠标台灯制作方法2018-09-18 5442
-
简易声控延时灯制作方法2018-08-15 16239
-
倒车雷达的制作方法2017-11-15 1247
-
LED光立方焊接制作方法2017-09-04 2629
-
LED显示屏制作方法2017-02-08 1337
-
光立方制作方法2016-12-09 1549
-
加湿器制作方法2012-11-19 3888
-
LED显示屏制作方法教程2010-02-15 6184
-
双绞线的制作方法过程2008-12-07 12306
-
网线水晶头制作方法2008-09-03 5781
全部0条评论

快来发表一下你的评论吧 !
