

自动猫喂食器的制作教程
电子说
1.4w人已加入
描述
步骤1:材料
-Arduino 101
-超声波传感器HC-SR04
-电动机驱动器1A Dual TB6612FNG
-LM7806
-3D打印零件
-齿轮电动机DG01。
-通用6v直流电动机
-内置金属框架。
-塑料容器
-硅酮胶
-电线
步骤2:直流电动机驱动器组件
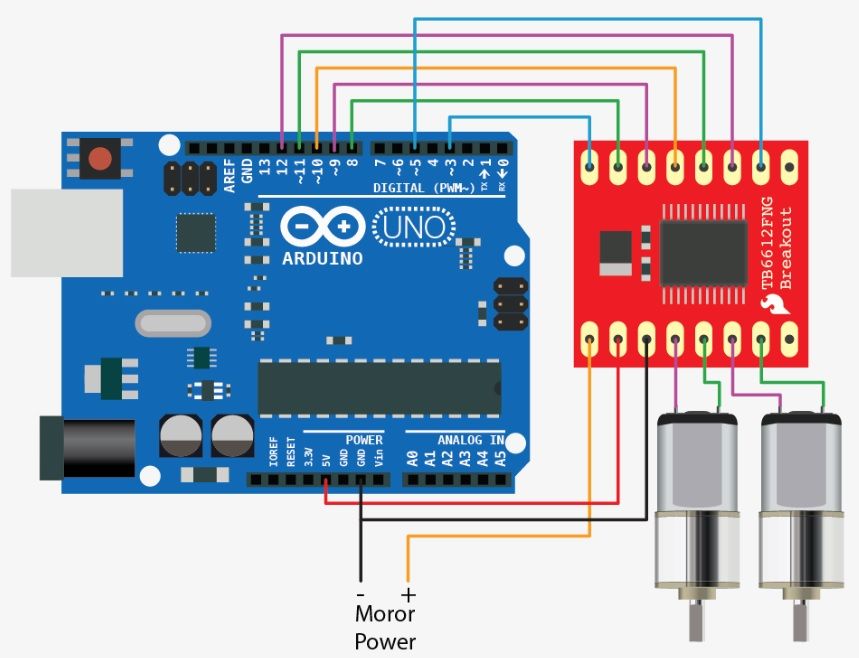
组装板
用于整个LM7806稳压器的Arduino 101的9V电源输出的DB6612FNG电压。
步骤3:超声波距离传感器
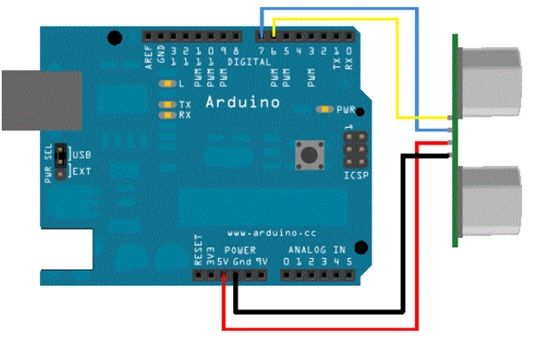
根据原理图将HC-SR04超声波传感器连接到Arduino 101板
步骤4:3D打印
包括STL文件,它们被打印在没有足够高度的“金属打印的Bot”机器上,需要将所有内容调整为0.93%的大小才能能够从www.tiguiverse.com打印STL文件
步骤5:容器切割
钻头用于切割容器的底部。 ,任何其他方法都可以正常工作
步骤6:胶印零件和容器
使用Duretan胶将3D打印的零件连接在一起,每次连接等待一晚上
步骤7:构建框架
这是在金属,弧焊中完成的,但木材也应该很好,
步骤8:添加了振动电机
-由于存在将食物卡入腔室的问题,因此包含了此电机。
-目前重量是用胶带固定的螺母,需要改进它。但是可以正常工作约一个月。
-从旧的盒式录音机中取出了6v电动机。
-从一个空的牛奶容器中切下了塑料。 》
第9步:加载草图
共享猫的喂食草图,可以进行更改以增加部分或减少或增加锁定时间(2小时)以不使猫过度喂食
真相是我们的猫习惯了噪音和振动,实际上喜欢在她到达时吃新食物,因此消除了10分钟的延迟。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
- 相关推荐
- 热点推荐
- 喂食器
-
基于单片机的宠物定时自动喂食器设计(原理图&程序)2020-08-25 6511
-
怎么实现宠物自动喂食器的设计?2021-06-15 2384
-
如何实现宠物喂食器的设计?2021-12-21 1407
-
如何设计一个宠物喂食器?2022-02-09 1352
-
自制一个宠物喂食器2022-07-22 2020
-
自动喂食器的设计原理图2015-12-30 7807
-
制作一个易于使用的自动宠物喂食器2022-06-28 7857
-
设计一个宠物NFC定时喂食器2022-08-06 4192
-
智能自动鱼/宠物喂食器开源分享2022-10-24 945
-
Arduino自动喂食器开源分享2022-11-09 890
-
基于Particle Argon的自动宠物喂食器2022-12-20 732
-
自动宠物喂食器开源硬件2022-12-23 1450
-
DIY Arduino猫喂食器2023-06-20 603
-
DIY自动猫喂食器2023-07-06 1344
-
宠物自动喂食器主控芯片DSH31862024-11-01 1844
全部0条评论

快来发表一下你的评论吧 !
