

如何使用Arduino制作万能表
电子说
描述
步骤1:材料
这是要使用的材料。
集成:
IC ATMEGA 328P(Arduino UNO/Duemilanove )
LM741
LM393
稳压L7805CV
LCD 16X2
晶体16MHz
电容器:
0.33uF
100nF
2 x 22pF 《1》聚酯1uF 《电阻:10K电位计
7 x 10K
2 x 220欧姆
1 M 《150》 330欧姆
二极管:
1N4004
连接器:
端子块2针
4 x MOLEX 100支2针
4针MOLEX花费100
4 x Borne
2 x开关
2 x按键盒
步骤2:代码和性能
作为测量骨骼电容的三个功能,电感和电阻,我们必须选择我们想做的,要选择功能并使用2位可以计数0-0,0-1,1-0,1-1。
所以我们使用两个开关进行选择,使它们用作下拉开关,将它们用作下拉开关,以测量电感为0-0,电容为0-1,电阻为1-0,这就是方法我们选择衡量。
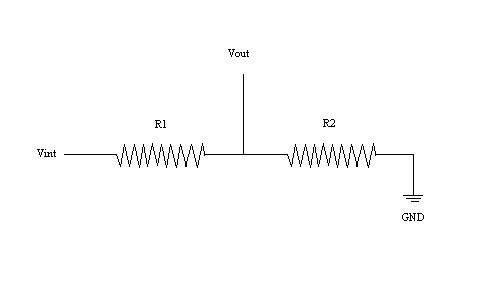
要测量电感,请使用LM393比较器来测量LM741的电容,并使用10k电阻轻松地测量电阻并制作一个分压器。
假设我们要计算R1。我们知道R2的值为10k,我们知道Vin的值为5V(通常在Arduino环境中可以找到),并且在Arduino的模拟Vout引脚上的读数是750。
1 。-我们知道ADC Arduino的分辨率为10位,这意味着对于0V到5V之间的输入值,可以进行1024分频(将2提升到10)。因此,如果我们在模拟引脚上施加5V,则其值为1023(1024不会记住从0开始计数,而不是从1开始计数)。如果我们在引脚上施加0V,其值将为0,例如,如果我们将其设为2.5V,其值将为511。
因此,如果以数字值提供读取模拟引脚的值是750,我们可以计算出Vout,即分压器的输出电压。
》》 5V/1024格= 0,00488V/格
》》 0.00488伏/格•750格= 3.66V
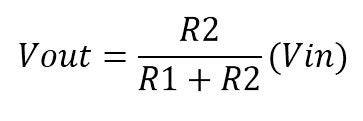
2.-我们可以已经清除了R1,那就是问题:
》》 Vout =(R2/R1 + R2)•Vin
》》 3.66 V =(10k/R1 + 10k)•5V
》》 R1 + 10k = 10k•5V/3.66V
》》 R1 =(10k•5V/3.66V)-10k =3.66KΩ
通常,我们可以将R1的值计算为:
》》 R1 =(R2•Vin/Vout)-R2
相同的代码在西班牙语文档中,因此如果您如有任何疑问,请这样说:
#include LiquidCrystal lcd(13, 8, 7, 5, 4, 2);
#define R_1 A1
#define R_2 A2
#define IND_1 6
#define IND_2 12
#define fuente_pin 11
#define switch_pin 10
#define descarga_pin 9
#define PIN_1 A3
#define PIN_2 A4
//Variables leer pines
int pin_1;
int pin_2;
//Variables para inductometro
double pulso;
double frecuencia;
double capacitancia;
double inductancia;
//Capacimetro
float R = 1.0e6;
float C = 0;
float RC = 0;
long t_inicio = 0;
volatile long t_alto = 0;
long T = 0;
float VCC = 4.50;
float Vref = VCC / 2;
float V0 = 0;
float error_correccion = 40.;
int retardo_delay = 20;
//Variables resistometro
int vR_1 = 0;
int vR_2 = 0;
float Vin = 5;
float Vout = 0;
float Res_1 = 10000;
float Res_2 = 9000000;
float r_1 = 0;
float r_2 = 0;
float Resistor_1[8];
float Resistor_2[5];
float ResArreglo_1;
float ResArreglo_2;
void setup() {
lcd.begin(16, 2);
//Configuracion de pines
pinMode(PIN_1, INPUT);
pinMode(PIN_2, INPUT);
//Configuracion Inductometro
pinMode(IND_1, INPUT);
pinMode(IND_2, OUTPUT);
capacitancia = 0.000001021;
//delay(200);
//Configuracion de Resistometro
pinMode(R_1, INPUT);
pinMode(R_2, INPUT);
//Configuracion Capacimetro
attachInterrupt(1, stop, RISING);
Vref = VCC / 2;
pinMode(fuente_pin, OUTPUT);
digitalWrite(fuente_pin, LOW);
pinMode(switch_pin, INPUT);
pinMode(descarga_pin, INPUT);
}
void loop() {
leerpines();
if (pin_1 == LOW && pin_2 == LOW) {
digitalWrite(IND_2, HIGH);
delay(5);
digitalWrite(IND_2, LOW);
delayMicroseconds(100);
pulso = pulseIn(IND_1, HIGH, 5000);
lcd.clear();
if (pulso 》 0.1) {
frecuencia = 1.E6 / (2 * pulso);
inductancia = 1. / (capacitancia * frecuencia * frecuencia * 4.*3.1459 * 3.14159);
inductancia *= 1E6;
lcd.setCursor(2, 0);
lcd.print(“INDUCTANCIA:”);
//delay(200);
if (inductancia 》= 1000) {
lcd.setCursor(0, 1);
int valor = (inductancia / 1000) - 0.5;
lcd.print(valor);
lcd.setCursor(6, 1);
lcd.print(“mH”);
} else {
lcd.setCursor(0, 1);
int valor_2 = inductancia + 10;
lcd.print(valor_2);
lcd.setCursor(6, 1);
lcd.print(“uH”);
}
} else if (pulso 《 0.1) {
lcd.setCursor(2, 0);
lcd.print(“INSERTAR IND”);
}
delay(300); } if (pin_1 == LOW && pin_2 == HIGH) {
lcd.clear();
for (int i = 0 ; i 《= 7; i++) {
Resistor_1[i] = analogRead(R_1);
ResArreglo_1 = ResArreglo_1 + Resistor_1[i];
}
vR_1 = (ResArreglo_1 / 8.0);
Vout = (Vin * vR_1) / 1023;
r_1 = Res_1 * (1 / ((Vin / Vout) - 1));
lcd.setCursor(2, 0);
lcd.print(“RESISTENCIA:”);
if (r_1 《= 999) {
lcd.setCursor(0, 1);
lcd.print(r_1);
lcd.setCursor(9, 1);
lcd.print(“Omhs”);
} else if (r_1 》= 1000) {
r_1 = r_1 / 1000;
lcd.setCursor(0, 1);
lcd.print(r_1);
lcd.setCursor(9, 1);
lcd.print(“KOmhs”);
}
delay(500);
ResArreglo_1 = 0;
} if (pin_1 == HIGH && pin_2 == LOW) {
lcd.clear();
if (debounce(switch_pin) == LOW)
{
pinMode(descarga_pin, OUTPUT);
digitalWrite(descarga_pin, LOW);
delay(100);
pinMode(descarga_pin, INPUT);
digitalWrite(fuente_pin, HIGH);
t_inicio = micros(); } if (t_alto 》 0 && t_inicio 》 0 && (t_alto - t_inicio) 》 0 )
{
T = (t_alto - t_inicio);
RC = -T / log((Vref - VCC) / (V0 - VCC));
//Vref = VCC/2
//V0 = 0V
C = RC / R; //Valor en uF
lcd.setCursor(0, 0);
lcd.print(“C:”);
lcd.setCursor(3, 0);
lcd.print(C * 1000, 1);
lcd.setCursor(13, 0);
lcd.print(“nF”);
lcd.setCursor(0, 1);
lcd.print(“C:”);
lcd.setCursor(3, 1);
lcd.print(C * 1000000 - error_correccion , 0);
lcd.setCursor(13, 1);
lcd.print(“pF”); t_inicio = 0;
t_alto = 0; digitalWrite(fuente_pin, LOW);
delay(2000);
}
}
}void leerpines() {
pin_1 = digitalRead(PIN_1);
pin_2 = digitalRead(PIN_2);
}void stop()
{
t_alto = micros();
}int debounce(int pin)
{
int estado;
int previo_estado;
previo_estado = digitalRead(pin);
for (int i = 0; i 《 retardo_delay; i++)
{
delay(1);
estado = digitalRead(pin);
if ( estado != previo_estado)
{
i = 0;
previo_estado = estado;
}
}
return estado;
}
步骤3:电路,原理图和PCB
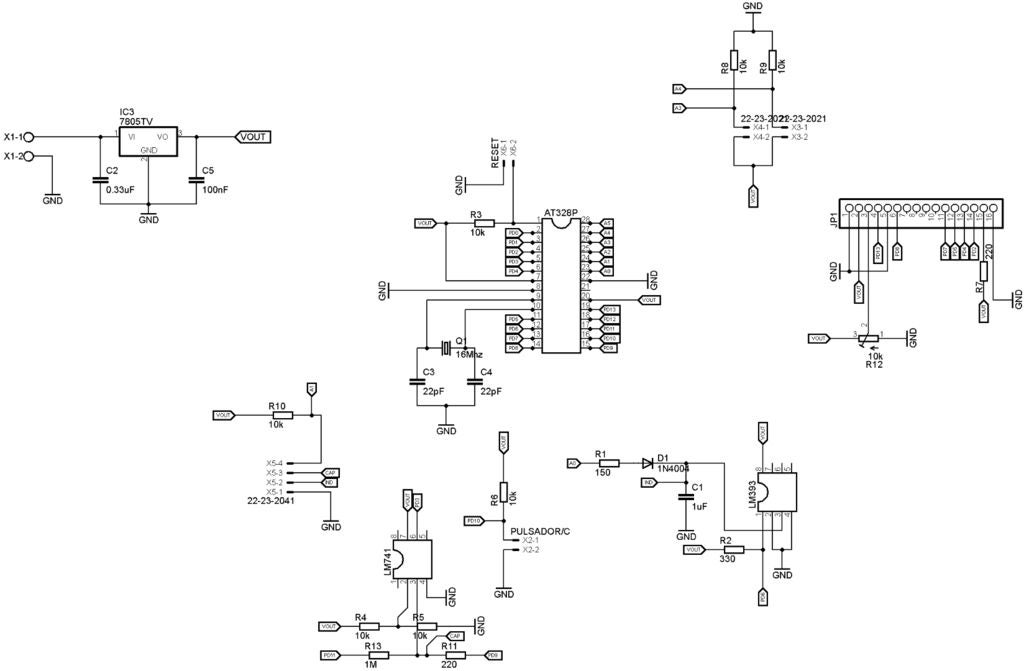
在这里您可以看到原理图中所有内容的连接方式,我上传了用老鹰。
-
万能表如何测量电瓶2024-05-20 4416
-
万能表和摇表有什么区别?2024-05-11 7844
-
万能表怎么测短路2023-06-03 14461
-
#硬声创作季 这是为什么你应将此电路添加到万能表Mr_haohao 2022-10-21
-
三级管用眼判断三个极_三级管用万能表怎么测2020-03-14 10965
-
请问104k瓷片电容表针万能表怎检测好坏?2018-08-31 3821
-
万能表怎么测量干电池2018-08-21 45751
-
万能表测试晶振一定准确吗?2018-06-06 9979
-
咪头用万能表怎么测_咪头怎么辨认正负极2018-04-28 43052
-
运放ad8066怎么万用表测量有没有坏2017-11-27 4309
-
数字万能表使用2014-03-25 3995
-
手把手全程教你DIY制作万能2013-10-23 7426
-
自制欧姆表及万能表2012-02-28 4630
-
用万能表判别红外接收头引脚方法2010-03-02 11064
全部0条评论

快来发表一下你的评论吧 !
