

如何使用LinkIt ONE微控制器创建雷达
电子说
描述
步骤1:需要的材料
材料:结果,1。 LinkIt ONE微控制器
2。声纳模块(我使用了SRF05,但04也可以使用)
3。面包板点击4。母-母电缆
5。公-面包板公电缆
6。小型伺服器(正在安装东西)
7。 CardStock或思维纸**
8。热熔胶**
软件:
1。 Arduino IDE(1.6.4)
2。处理2.2.1
可选:
1。粘性Tac(强烈建议)
2。松紧带(再次强烈建议)
3。 3D打印机(如果有,则不需要上面的注视材料)
**仅在没有3D打印机的情况下需要
步骤2:接线!
声纳模块:
1。模块上的Vcc到LinkIt
2上的5V。在LinkIt
3上将模块触发到D9。在模块上回显到LinkIt
4上的D11。模块上的GND到LinkIt
5上的GND。模块上的OUT无响应
Servo:
1。伺服器上的地线(通常为棕色或黑色)到LinkIt
2上的GND。伺服上的正极(通常为红色或橙色)到LinkIt 《3》上的5V。伺服上的信号线(通常为黄色)到LinkIt上的D9。由于存在多个接地和5V连接,因此需要使用面包板将它们组合在一起。
第3步:软件!
您将需要安装具有linkIt ONE SDK的Arduino IDE(更多信息)。
您还需要处理2.2.1(代码可能不适用于较新版本)但您可以尝试,如果有,请发表评论)。看上面的图片。
步骤4:代码!
下面,我附加了arduino(.ino)文件和处理(.pde)文件。
您需要对Radar_Processing文件做几件事。..
1。将COM端口更改为LinkIt ONE设备在行16
2上使用的端口。添加字体(更多详细信息,在下一步)
步骤5:Radar_Processing.pde字体添加
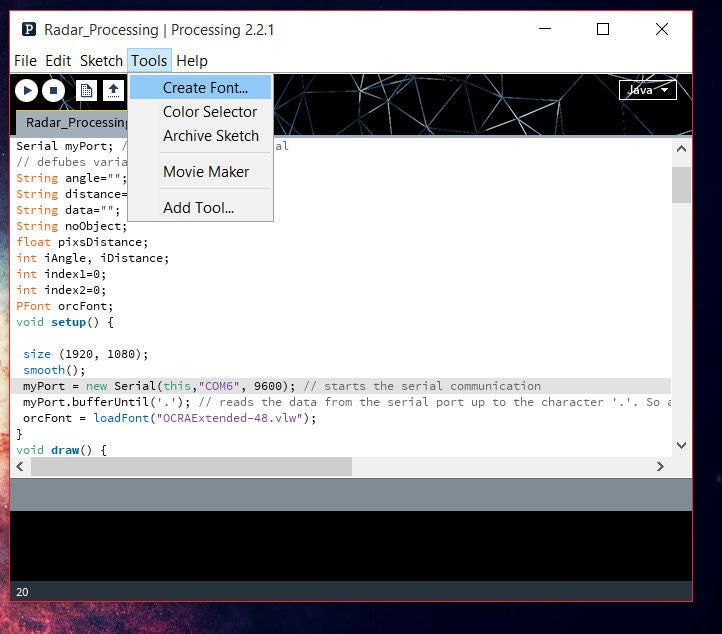
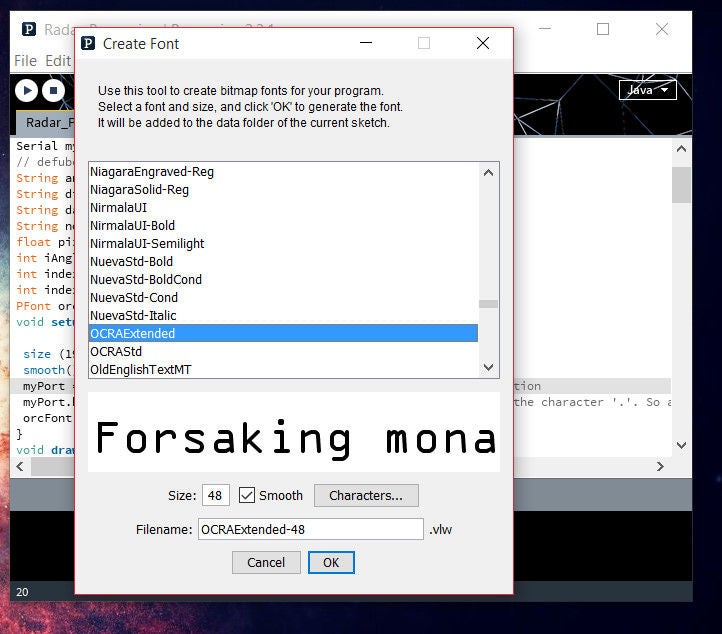
您需要通过转到工具-》创建字体,然后选择OCRAExtended(在列表的底部附近)来添加新字体
步骤6:声纳设备支架
站起来
选项1: 3D打印
如果您可以使用3D打印机,则只需打印我在下面提供的文件(.stl)。一旦将对象打印完,可能需要对零件进行一些锉削,以将母线连接器插入上图所示的插槽中,因为它是为紧密配合而设计的。
选项2:卡片纸
如果您没有3D打印机,则可以轻松地折叠一些卡片纸(谷物盒)或纸板以制成“ L”形,然后使用热熔胶粘贴女性声纳设备插入的连接器。 (上面带有纸的形状示例)然后可以在支架上切/戳一个小孔以使螺钉穿过。
通过打印或制造支架来创建支架之后。 ,只需使用伺服器随附的螺丝将支架固定在伺服器上(如上图所示),请注意不要将其拧紧到伺服器中,否则可能会导致伺服器出现问题。
第7步:组装!
我将所有东西都装在一块全尺寸的面包板上,只是为了保持条理。我用橡皮筋和粘性TAC将所有东西固定在面包板上。此步骤应该是不言自明的,您可以查看图片以了解如何将所有内容放置在我的计算机上。
步骤8:运行程序!
完成所有步骤后,只需将.ino代码上载到LinkIt ONE。上传代码并运行LinkIt ONE后,请在处理IDE中按播放按钮,这将使Servo开始移动并启动一个新窗口,在其中显示数据。 (上面的显示窗图片来自“如何机电一体化”)
**虽然很明显,但必须插入LinkIt ONE并由您的计算机供电才能使处理程序正常工作**
步骤9:尽情享受吧!
您现在已经制定了自己的雷达程序,就像60年代潜艇中的雷达程序一样!
-
联发科linkIt One的AWS IoT黑客系列开源分享2023-06-20 809
-
使用集成的微控制器创建低成本ADC2023-01-16 1988
-
带linkit ONE的Grove串行相机2022-12-26 558
-
电梯的基础原理:微控制器jf_10480160 2022-12-14
-
与Arduino微控制器使用而创建的Connect 4游戏2022-11-24 830
-
使用LinkIt ONE实现空气质量监测系统的设计2022-09-21 4013
-
什么是微控制器?如何编程微控制器?2020-08-21 13760
-
基于PSoC微控制器的模拟功能创建复音钢琴2020-06-11 1356
-
如何使用Grove Starter Kit plus和LinkIt One进行设置和运行2019-12-12 4838
-
如何使用Mediatek Linkit One板进行流量测量2019-10-16 2756
-
MediaTek_linkIt_ONE_Developers_Guide2016-02-24 1285
-
使用LinkIt ONE为机器人提供源动力2016-01-25 6649
-
联发科技创意实验室推出开源开发平台LinkIt™ Smart 76882015-12-03 5406
-
联发科LinkIt ONE开发板介绍2015-09-29 3952
全部0条评论

快来发表一下你的评论吧 !
