

带有红外传感器且无微控制器的机器人避障的制作图解
电子说
描述
步骤1:收集组件
收集这些组件:
用于红外传感器:
1)1K电阻器
2)10K电阻器
3)红外接收器LEDs
4)红外发射器LEDs
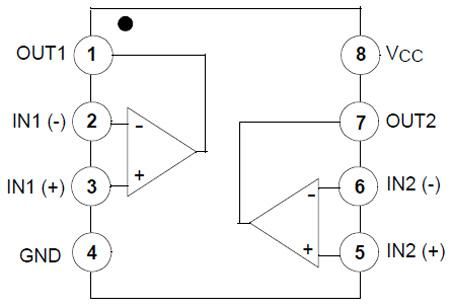
5)LM358N运算放大器IC
6 )10K TRIMPOT
7)8针集成电路逻辑芯片插座
8)3针电线连接器
主电路:
9 )IC 7407十六进制逆变器IC
10)IC L293D电机驱动的IC
其他部件:
11)12V减速电机
12)轮子
13)制造车身用纸
14)电机支架(管道支架)
15)脚轮
16)2针导线连接器
17)电池
18)电池座
19)开关
20 )跳线
21)Verroboard
22)烙铁
23)焊丝
步骤2:制作IR传感器模块

好,所以我们将所有零件都收集到LETS START BUILDING 。.. !!
首先,我们将使IR传感器具有电路图。
测试传感器:
连接电池,可以使用9V电池没关系。它不会损坏IC LM358N,现在将手移向IR接收器,当您的手靠近IR发射器时,引脚1上的LED会发光。红外发射器LED应当稍微向红外接收器LED倾斜,并且不应平行。因此,从红外发射器发射到物体后的红外线应反射到接收器,因此插针1上的LED发光。注意,为了准确起见,我在IR接收器LED上使用了两个IR发射器LED。
步骤3:制作主电路
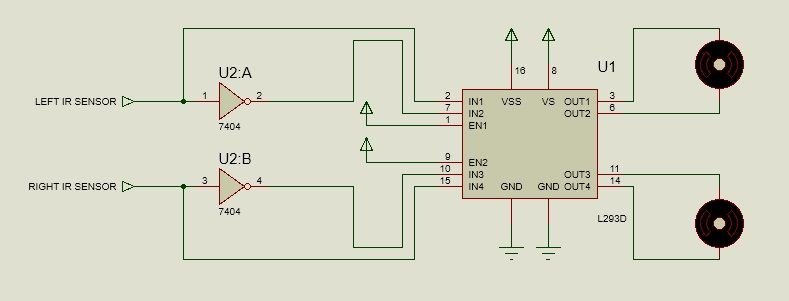
给出了主电路的电路图。
构建完此主电路后,将其连接到两个红外传感器模块电路,如图所示。
步骤4:制作主体
我没有将主体制成特殊的东西,只是使用了一块丙烯酸板并粘贴了
我用管道固定器将电机固定在丙烯酸板上。
步骤5:组装
组装所有部件,并将两个IR Sensor Module与主电路连接。并将其放在机器人的身上。连接交换机。红外传感器应该与轮胎处在同一水平,如图所示。
您一定想知道为什么我要使用两节9v电池。当我完成机器人的安装后,我注意到机器人在使用+ 9V电池时甚至速度很慢(因为我使用的是12V减速电机),所以我又添加了一个+ 9V电池。所以现在我有两节电池,两个都是+ 9V,一个是新电池,另一个是我认为8+伏的电池。我把两者都加了,所以我在17伏特以上得到了9 + 8。现在,机器人正在高速运行。
步骤6:进行跟踪
如果需要,可以进行跟踪如图所示,我使用了张纸。
-
红外传感器避障如何设计2012-10-15 0
-
解读机器人的几大避障技术2018-12-12 0
-
红外传感技术:疫情探测的“先锋队”(资料+干货)2020-02-18 0
-
避障机器人电路设计解决方案2020-10-28 0
-
如何实现四路红外传感器避障小车的设计?2021-12-20 0
-
红外避障传感器制作相关资料2016-01-14 656
-
移动机器人避障使用的传感器2017-01-07 1493
-
深度分析:服务机器人红外避障传感器安装位置2017-01-13 4566
-
单片机控制的机器人避障系统2018-01-30 1058
-
如何进行简易避障机器人的设计2019-06-19 1415
-
工业机器人避障主要用到了哪些传感器2019-10-24 2701
-
使用红外传感器的避障机器人2022-11-24 613
-
用Arduino和L298制作带有避障机器人的巡线器2023-01-31 346
-
解读工业机器人避障常用的视觉传感器、激光传感器、红外传感器、超声波传感器2024-06-19 1897
-
机器人红外避障2024-09-19 168
全部0条评论

快来发表一下你的评论吧 !
