

多功能数码单反遥控器的制作
电子说
描述
步骤1 :
此多功能遥控器通过复制尼康DSLR响应的IR命令脉冲来工作。有关如何复制此信号的我的帖子可以在这里找到。收到信号后,可以通过对微控制器进行编程以完全相同的方式向IR LED发出脉冲来复制该信号。
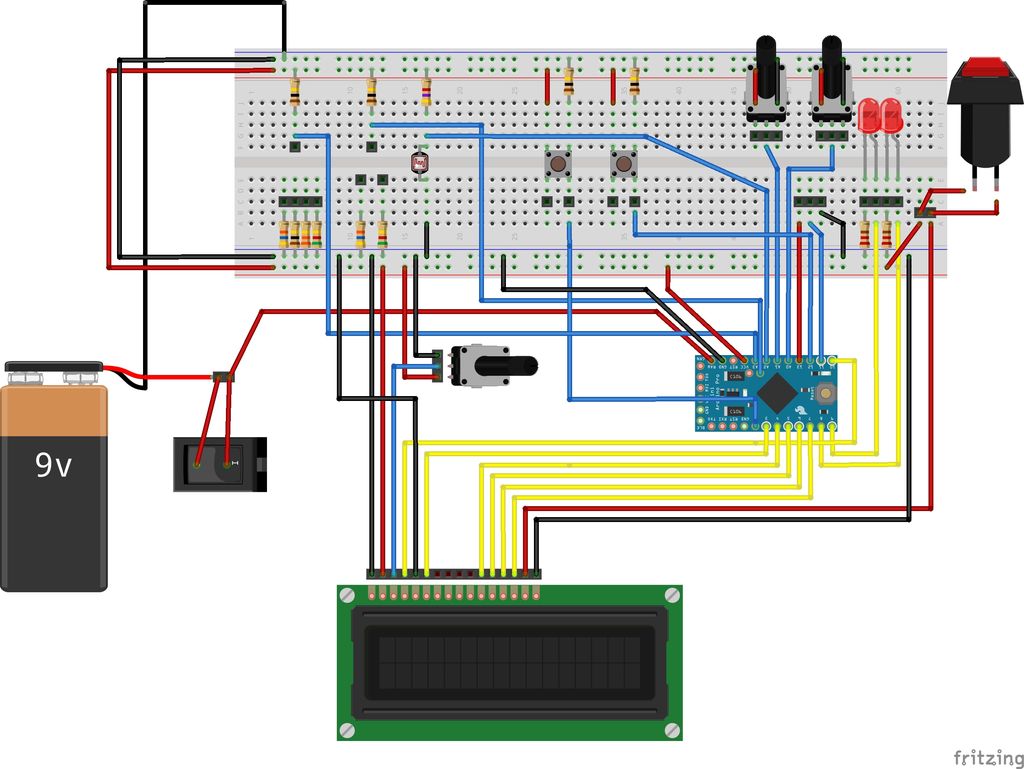
其他功能通过以下方法实现(请参见面包板/PCB图片) :-
a) 模式选择 。该电路使用具有四个“下”臂(R3至R6)的分压器,每个下臂具有不同的电阻。通过在每种模式之间切换并读取输出电压(Arduino模拟引脚A3),设备可以在四种操作模式之间切换。
a) 间隔计 。我们使用一个电位器(R7)设置脉冲之间的间隔,并使用另一个电位器(R8)决定总共需要传输多少个脉冲。
b) 光检测 即可。一个电位器(R7)用于设置阈值水平。如果来自闪电的光线强度超过此阈值,则将发送一个脉冲来激活相机的快门释放。使用分压器形式的光敏电阻(R10)和4.7 K欧姆电阻(R9)测量(通过Arduino Analog Pin A2)光强度。有关此分压器工作原理的详细信息,请点击此处。
c) 运动感应 。使用PIR(被动红外)传感器可实现运动感应。这些廉价的传感器可测量环境热量水平,如果环境温度水平存在变化,则可在其输出线上发出HIGH信号。因此,当动物(或任何其他温暖的身体)走过摄像头陷阱时,PIR会感应到该运动并在其输出线上产生HIGH。微控制器(Arduino数字引脚D11)读取此HIGH信号并触发一个脉冲。通过Arduino数字引脚D13为PIR供电。
d) 测试模式 :设备可以在“测试”或“脉冲”下运行(通过开关连接到插头J25,J26,J27)。在“测试”状态下,微控制器不会向IR LED发出脉冲(激活相机),而是使正常的红色LED闪烁。因此,通过将遥控器置于“测试”状态,您可以进行所需的所有设置,并通过观看红色的“测试” LED确认触发器将在正确的时间操作。现在,您可以将设备放回“脉冲”状态,它现在将通过操作相机的IR LED发送脉冲。
e) 状态LCD 。在调整各种开关和电位计上的设置时,LCD显示屏将显示以下信息。..
a)设备处于哪种模式-间隔计/光检测/运动检测/手动。
b)在间隔计模式下-(i)两次拍摄之间的延迟(ii)没有曝光
c)光线检测模式-(i)阈值设置(ii)当前的光线读数
d)被动红外模式-LCD通过显示“ Motion DETECT !!”来指示是否检测到任何运动。
步骤2:所需的组件

微控制器
Arduino Pro Mini-一个(我使用的是Pro Mini,但是任何与Arduino兼容的板都可以通过对指定为“ RESET”引脚的引脚进行必要的更改来正常工作。它必须是具有中断功能的引脚。如果您使用Arduino UNO,则无需进行任何更改。 。
电阻
R2至R6-模式选择分压器R9-光检测的“上”臂离子分压器
R10-用于光检测分压器“下”臂的LDR
R15,R16,R 17-“测试”/“传输”状态选择分压器
R11-RESET按钮的下拉电阻(此版本中不需要)
R12-CONFIRM按钮的下拉电阻
R13,R14-限流与输出LED串联的电阻。
有关所需电阻器的确切值,请参见PCB图片上的注释。
电位器
R1-LCD亮度电位器0-10K
R7-延迟/阈值设置电位器0-10K
R8-重复设置电位器0-10K
》 开关
主电源DC 9V-开/关式开关
模式选择开关-4位旋转选择器开关
“测试/脉冲”状态选择开关-2个位置选择器开关
LCD背光灯开关-按钮
CONFIRM按钮开关-按钮
其他组件
被动红外(PIR)传感器-一个
IR LED-一个红色LED-一个
16x02背光LCD显示屏-一个
步骤3:组装
下载电路图(ML_L3_Remote_With_PCB.pdf)并准备好PCB,然后将所有组件焊接到位。如果您不知道如何蚀刻PCB,那么有很多指导可以告诉您如何进行。否则,您可以在这里阅读我的方法。
您还可以下载我用来制作此电路的Fritzing草图。我上传了两个版本:-
(a)Breadboard.fzz(显示面包板上的所有组件)
(b)PCB.fzz(显示需要可以被蚀刻,但是没有任何“外部”组件,只是它们的插头引脚)。
PCB仅在一侧被蚀刻。我试图尽量减少在PCB上进行所有连接所需的跳线数量,并且在需要将跳线焊接到位的地方都使用1/2/3针母接头。您可以在我上传的PCB图片上看到标题的描述。这些列在下面。..
J5,J6-用于四向旋转开关(模式选择)
J25,J26,J27-用于两向选择开关(区域选择)
J9,J10-用于RESET按钮(此版本中不需要)
J7,J8-用于CONFIRM按钮
J32-用于PIR引脚
J13,J24-用于测试LED引脚
J14,J23-用于IR LED引脚
J3-用于LCD背光按钮
J11 -用于电位计1
J31-用于电位计2
J4,J22-用于LCD对比度电位计
J2,J21,J30-用于LCD连接
J15-用于主DC 9V电源开关
J16-用于电池端子
J18-用于Arduino I/O引脚
J17-Arduino Pro PC的迷你接口
J19-Arduino输出到LEDs
J 29-Arduino输出引脚连接到LCD上的RS引脚
J 28-RESET按钮输入到Arduino中断引脚D2(此版本中不需要)
最后,还上传了Arduino源代码(Nikon_IR_Multi_Functional_Remote.ino)。
步骤4:Bo对其进行修改
一旦电路准备就绪并且一切正常,则可以使用任何一种盒子来放置组件。我用了一个带铰链盖的塑料盒。它的尺寸有点大,但可以容纳所有组件而不会在电线上施加太大的压力。
在所有按钮,开关和LCD都可以插入的地方切出孔。将所有物品固定到位。
LDR固定在盒子的一侧。盒子的另一侧装有发送红外信号的PIR和IR LED(参见图片)。
步骤5:操作
1。开启设备
2。选择所需的操作模式。 LCD将显示选择的模式(间隔计/光检测/运动检测/手动)以及该模式的参数……
a)在间隔计模式下-(i)两次拍摄之间的延迟(ii)曝光次数
b)在光检测模式下-(i)阈值设置(ii)当前光读数
c)被动红外模式-液晶显示屏显示通过显示“ Motion DETECT !!”来指示是否检测到任何运动。
3。如有需要,使用电位计R7和R8更改设置
4。将Regime选择器开关置于“ TEST”
5。按下开始/确认按钮。如果TEST LED闪烁符合您的要求,则可以将模式选择器翻转到“ PULSE”位置,关闭电源,然后再次打开设备,然后再次按START以开始发送相机脉冲。
在手动模式下,每按一次START/Confirm按钮,将发送一个脉冲
6。要随时更改模式,请将模式选择开关旋转到所需位置。关闭遥控器,然后再次打开,以进入新的操作模式。
-
自制数码单反相机捕捉器2022-07-04 1148
-
数码单反HDMI接口的作用2019-05-09 5186
-
多功能遥控器360°无死角覆盖2018-04-08 9088
-
佳能数码单反相机完全攻略2011-04-12 4808
-
全幅(全画幅)数码单反相机知识详解2011-03-01 4028
-
数码单反常用电池解析以及使用保养技巧(图)2010-02-25 1464
-
尼康D40数码单反相机2009-12-18 2024
-
尼康D2X数码单反相机用户手册2009-11-23 1057
-
多功能红外遥控器电路图2009-05-27 1009
-
多功能红外遥控器2008-06-20 1331
全部0条评论

快来发表一下你的评论吧 !
