

如何使用操纵杆通过FPGA控制步进电机
电子说
描述
第1步:收集您的材料
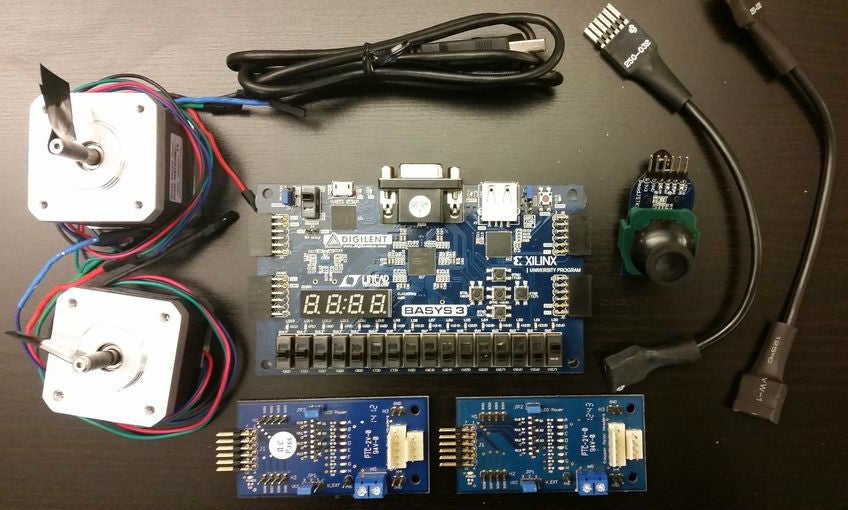
您需要什么:
-已阅读并或完成了我的PmodJSTK和PmodSTEP教程
-Xilinx Vivado已安装并获得许可
-Basys 3
-2 PmodSTEP
-PmodJSTK
-2步进电机
-USB A至B micro
-2 12针Pmod电缆
步骤2:代码的结构
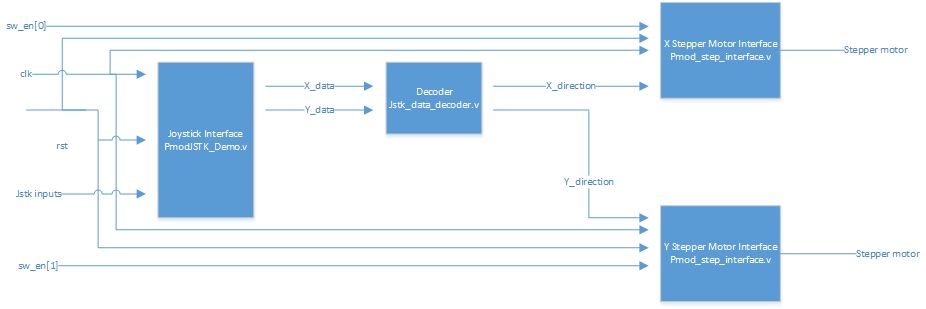
为连接这两段代码,我添加了一个解码器,并使用了一个PmodJSTK接口和两个PmodSTEP驱动程序。您可以在上图中看到此结构。我修改了PmodJSTK接口,以使其仅从操纵杆接收数据,而不向LED发送数据。
解码器从操纵杆获取数据,并将其转换为方向信号,该信号指示步进电机应向左,向右还是静止。当操纵杆居中时,步进电机不应移动。
步骤3:下载并打开Vivado项目

下载此步骤附带的zip文件。
解压缩文件并打开vivado项目。您可以通过双击文件或打开vivado并选择打开的项目来执行此操作。注意:我使用Vivado 2015.4创建了这个项目。如果安装了其他版本,建议您在您的版本中创建一个新项目,然后添加每个源文件。您将需要添加jstksteptop.v,PmodJSTK_Demo.v,PmodJSTK.v,ssdCtrl.v,ClkDiv_5Hz.v,jstk_data_decoder.v,pmod_step_interface.v,clock_div.v,pmod_step_driver.v和jstk_servo_constraints。
第4步:生成位文件并对板进行编程
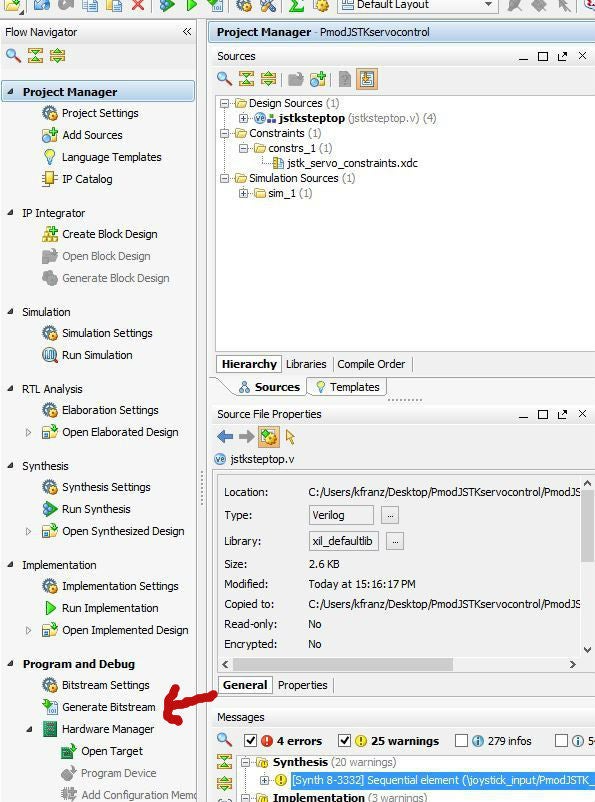
打开文件后,您可以生成位文件并
要生成位文件,请双击“生成位流”。要对该板进行编程,请打开硬件管理器,打开目标板并对板进行编程。
第5步:将所有组件插入在一起
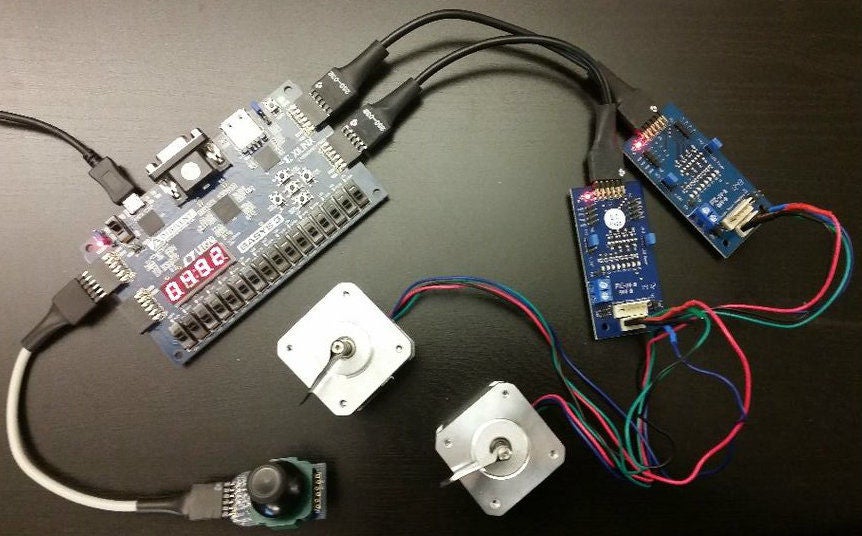
将PmodJSTK插入Pmod端口JA的顶层,将PmodSTEPS插入Pmod端口JB和JC,然后将伺服器插入PmodSTEP。
要启用伺服翻转开关,请打开1和0。现在,您可以移动操纵杆来控制步进电机的运动。
-
labview操纵杆2016-04-13 3397
-
小白求教,怎么实现操纵杆控制电机的旋转角度2018-02-05 7970
-
如何使用Arduino UNO、操纵杆模块和NRF24L01模块控制伺服电机?2021-06-28 1396
-
操纵杆工作原理2009-07-28 14539
-
怎样用Arduino和操纵杆控制伺服电机2019-08-01 6776
-
用拇指操纵杆控制伺服电机2022-10-26 599
-
使用PWM和操纵杆来控制RGB2022-11-07 765
-
如何用操纵杆控制伺服2022-11-16 721
-
如何使用Arduino和操纵杆控制BLDC电机2022-11-24 809
-
由操纵杆控制的SCARA手臂2022-12-05 849
-
使用操纵杆来控制RGB LED2022-12-27 727
-
DIY按钮操纵杆模块2023-01-04 621
-
一个使用操纵杆控制器控制伺服电机的电路2023-06-16 1579
-
如何使用模拟操纵杆来控制LED2023-06-28 680
-
如何使用操纵杆和Arduino控制伺服电机2023-07-27 3587
全部0条评论

快来发表一下你的评论吧 !
