

怎样用蓝牙和LabVIEW控制Servos
电子说
描述
步骤1:材料
1)LabVIEW
2)LabVIEW MakerHub LINX
3)PmodBT2
4) PmodCON3
5)chipKIT WF32
6)2个Micro Servos
*有些链接指向引言中未链接的所有产品。
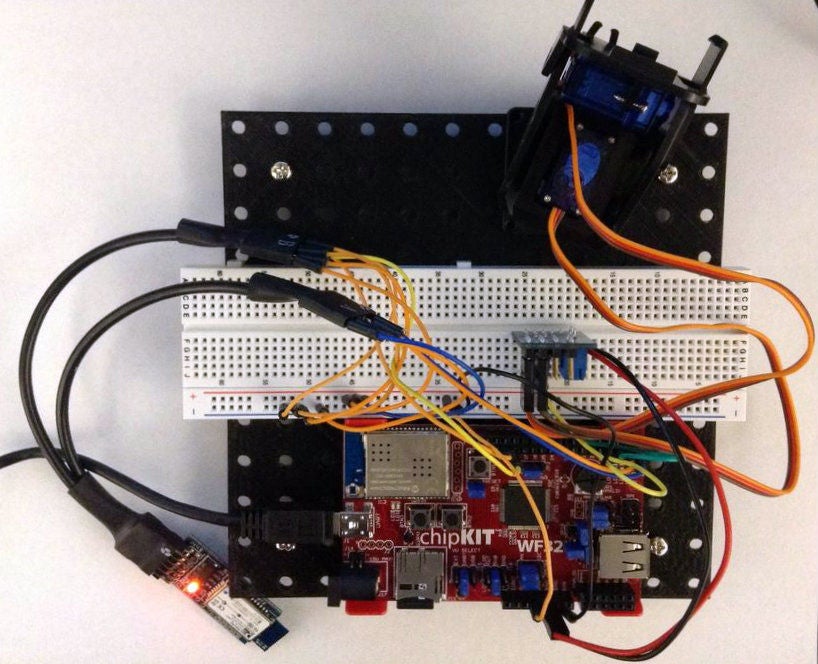
步骤2:接线!!
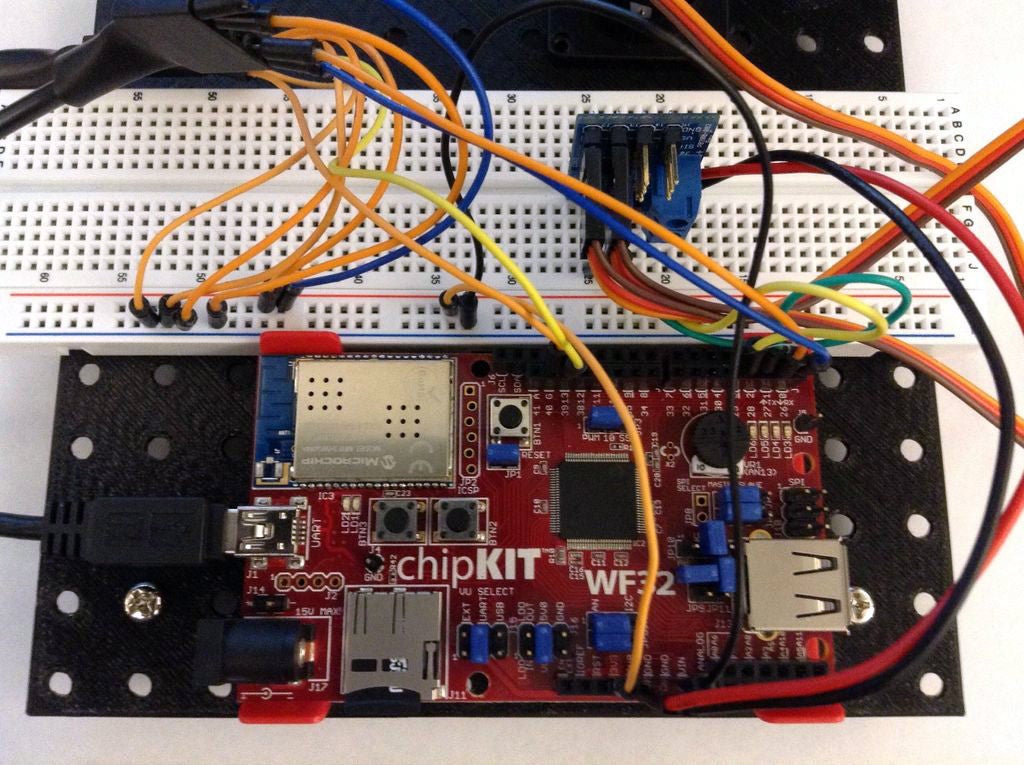
好了,现在我们有了零件,我们需要组装它们!
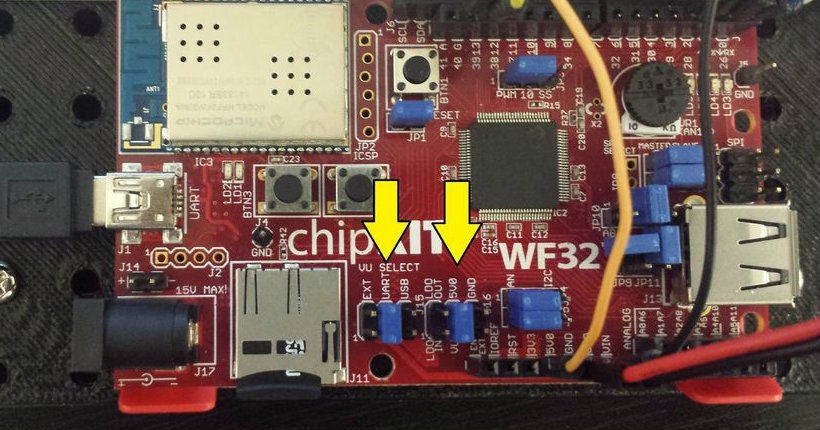
查看上面的图片,以确保您具有正确的跳线设置。这样可以确保开发板可以输出为微型伺服器供电所需的5V。
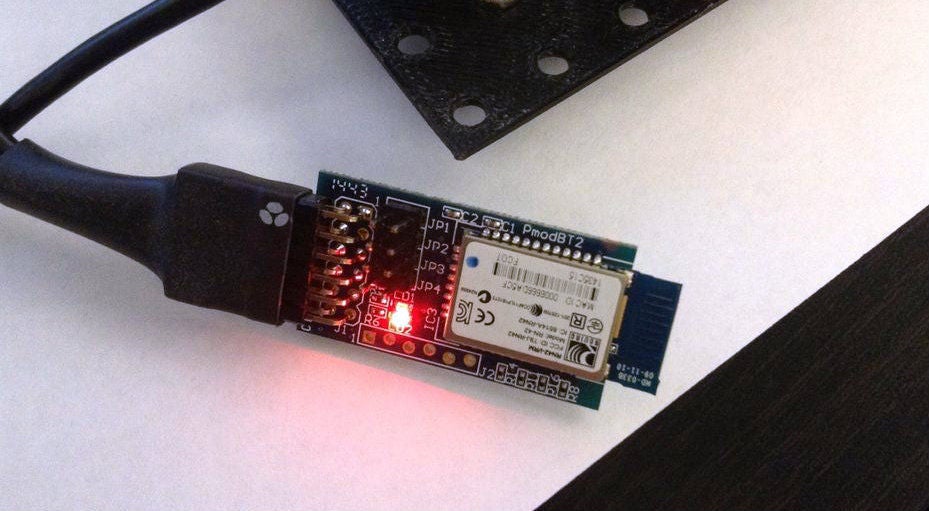
接下来,让我们连接PmodBT2。从PmodBT2参考手册中,我们可以看到连接器J1上的第一个引脚是RTS,然后一直到引脚12的连接是:RX,TX,CTS,GND,VCC,STATUS,〜RST,NC,NC,GND ,然后再次输入VCC。由于WF32没有CTS和RTS连接,因此只需将这些引脚接地即可。接下来,根据WF32(UART1)的辅助UART连接连接RX和TX。在这种情况下,WF32的TX为引脚40,而WF32的RX为引脚39。将WF32的TX连接至PmodBT2的RX,并将WF32的RX连接至PmodBT2的TX。换句话说,将PmodBT2上的第二个引脚连接到WF32上的引脚40,将PmodBT2上的第三个引脚连接到WF32上的引脚39。
将BT2上的引脚7连接到WF32上的引脚26。 BT2上的8引脚连接到WF32上的引脚27。另外,将接地和3.3V连接线连接到PmodBT2(不要忘记将CTS和RTS接地)。
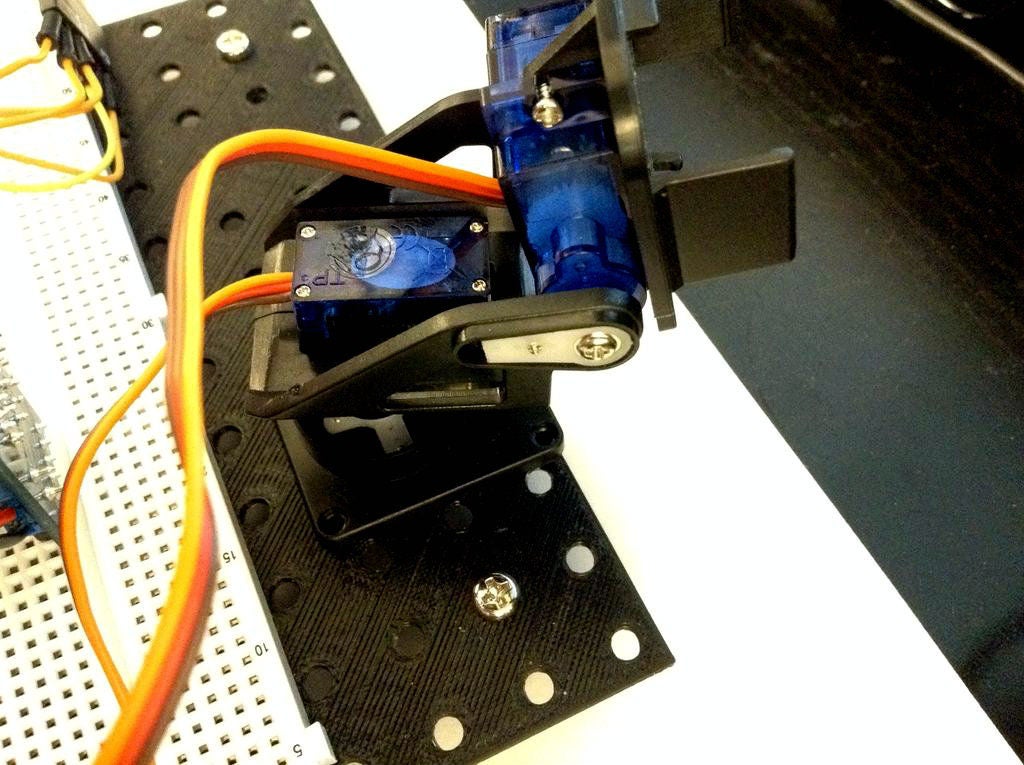
步骤3:完成接线
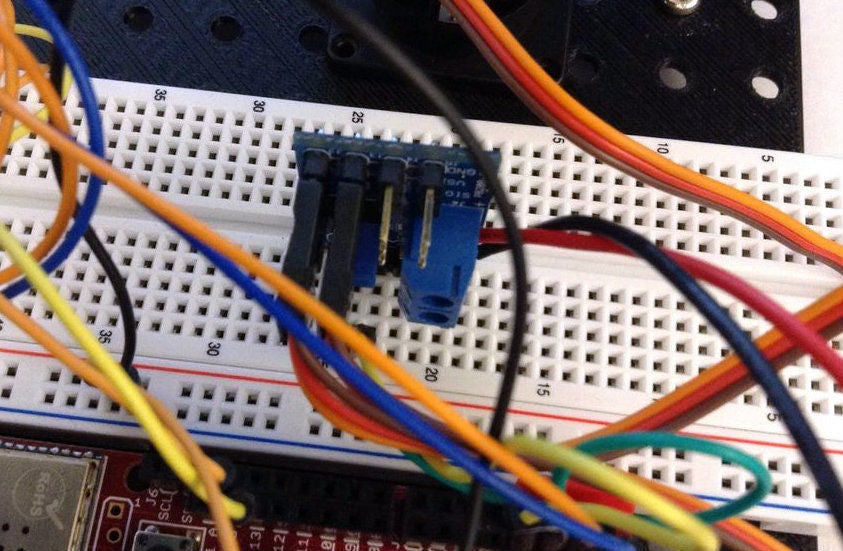
现在我们要做的就是将微型伺服器连接到PmodCON3,然后连接数据线以控制伺服器。将一个伺服器连接到P1,将另一个伺服器连接到P2。然后,将一根导线从6针接头连接器上的第一个引脚连接到WF32上的数字通道28,并将一根导线从6针接头连接器上的第二个引脚连接到WF32上的数字通道29。然后,将5V电源线连接到正极螺钉端子,将地线连接到负极螺钉端子。将5V连接到WF32上的5V0,并将接地连接到WF32上的GND。
好,我们完成了接线(最后)。
步骤4: LabVIEW代码


下载以下VI并将其打开。 LINX设置在前面板的左侧。选择您的电路板连接到的COM端口,并使用UART通道1。
前面板上的下一部分是可以向PmodBT2发送命令的地方。查阅RN-42数据表以获取所有命令的列表。要进入命令模式,请在命令发送中输入$$$,然后单击发送命令。如果成功,则应阅读Raw Reading中的CMD。要退出命令模式,请切换“添加”按钮以将回车添加到变速器中,然后在命令中输入---以发送并单击send命令。如果成功,则应阅读Raw Reading中的END。输入命令时,如果成功,则应在Raw Reading中读取AOK,如果失败,则应读取ERR。
默认情况下,RN-42通过UART以115200 Baud的速率进行通信。
步骤5:电话申请和完成说明
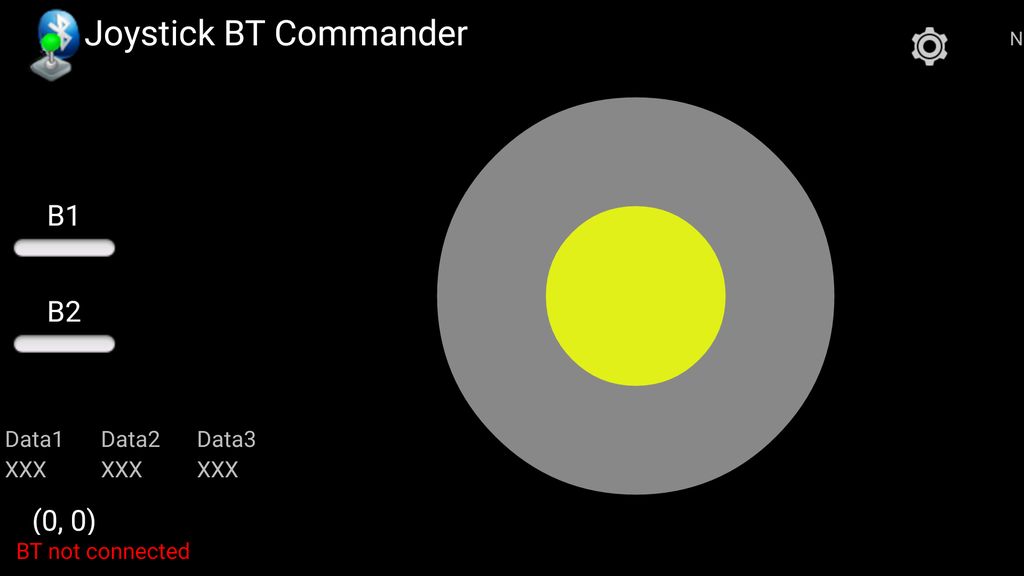

对于这个项目,我在Android上使用了Joystick蓝牙Commander(如上图)。打开应用程序并连接到PmodBT2。我的PmodBT2被命名为RNBT-A5CF。连接后,您应该能够在Raw Data指示器中读取8个ASCII字节(一个为空,六个用于UDLR,一个结束传输字节)。
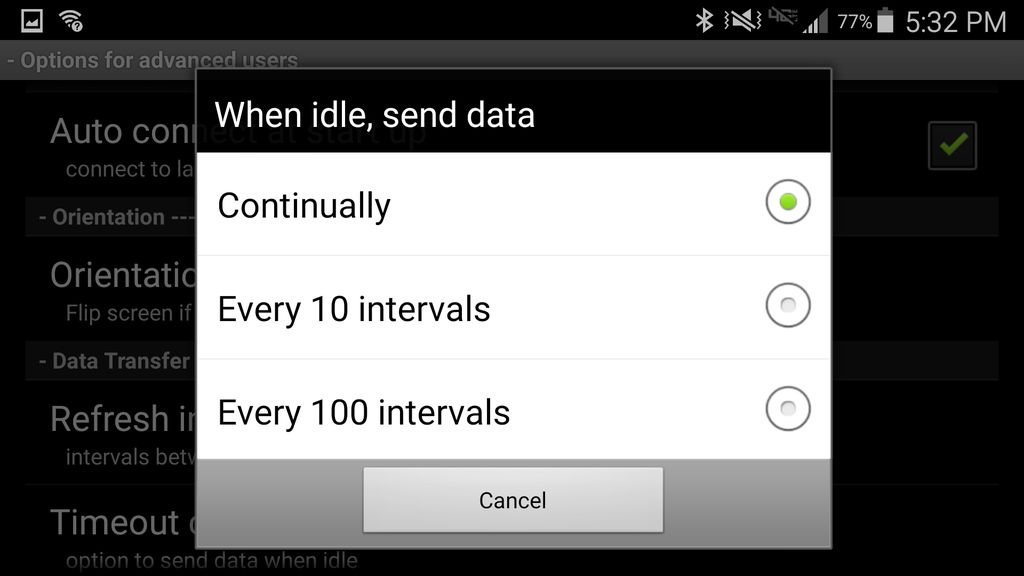
当操纵杆静止时,PmodBT2的X和Y值都将读取为200。这些值的范围从100到300,具体取决于操纵杆的位置。在应用程序选项中,确保将数据传输间隔设置为100 ms,并在空闲时连续发送数据(如上图所示)。
根据操纵杆的方向,相应地移动伺服器。例如,如果操纵杆向上和向左移动,则伺服器将向上和向左旋转(每个轴一个伺服器)。
您完成了!尝试以此为指导来建立自己的蓝牙连接。
-
怎样用labview实现设备正常时为绿色2011-10-18 5727
-
已用时间函数怎样用2012-10-08 3792
-
怎样用LABVIEW强度图颜色深浅表示随时间的表变化2013-01-20 9863
-
怎样用LabView实现停止等待的网络协议,各位大神介绍下思路2013-09-21 2542
-
怎样用FPGA控制舵机2013-10-20 3997
-
怎样用labview写 多项相加的和呢2014-10-28 12083
-
求助,请各位高手指点,怎样用LabVIEW创建一个课程表。2014-11-23 3246
-
怎样用51单片机控制电源2015-07-29 5319
-
怎样用labview编程自动输入网址,连接网站?2016-04-18 3399
-
lvm格式怎样用excel打开呢2016-09-08 12973
-
怎样用Labview连接差压变送器和二次仪表2016-11-28 3720
-
怎样用labview实现有限元的剖分2016-12-18 3625
-
已知直线斜率和截距,怎样用labview画出该直的图形啊2017-05-25 8037
-
labview中怎样用开关控制频率2019-10-17 1899
-
怎样用好手中的六位半万用表?2023-03-07 4366
全部0条评论

快来发表一下你的评论吧 !
