

如何使用Arduino和伺服电机来制作昆虫机器人
电子说
描述
步骤1:
在实际复制项目之前,这里简要介绍一下所使用的组件-
超声波传感器(图一和二):
传感器的最主要应用是障碍物的测量距离。它可以在任何照明条件下工作,因此可以在夜视传感器中找到广阔的空间。在此指导书中,我使用它来检测障碍物,它具有四个引脚(VCC,Trig,Echo,Gnd),并且在进一步的说明中已示出了连接。最好的例子是在汽车的辅助停车系统中,在该系统中,汽车向警告您的障碍物超过最小距离。
Arduino Uno (图2,图2)。 2):这是一个简单的编程平台,它从传感器,开关和相应地控制输出设备的许多设备(例如电动机等)获取输入。要对Arduino进行编程,您需要从Arduino主页安装Arduino IDE。
伺服电动机(图3,图4):伺服电动机与普通的直流电动机完全不同。它主要由四个部分组成:
普通的直流电动机。
位置感应设备。
减少齿轮的单位。
控制电路。
伺服系统具有三线连接:电源,接地和信号。电源必须经常使用;伺服器具有自己的驱动电子装置,可从电源线汲取电流来驱动电动机。伺服器的功能是接收来自Arduino的控制信号,该信号表示伺服轴的所需输出位置,并向其直流电动机供电,直到其轴转到该位置为止。
》! !这些知识足以继续进行。因此,让我们开始构建。
步骤2:所需的工具:
以下是构建此项目所需的组件。列表很简单:
双面胶带
剥线钳
鼻子钳
PCB
超声波传感器
Arduino uno
电缆扎带
伺服电机
螺丝拧紧器
电线(用于腿部)
连接线
电池
因此,一旦您准备好所有组件,就可以加速!!!
第3步:构造身体:使用伺服器
因此,机器人的底盘的设计取决于所用伺服电机的类型(小,大),但是我使用的是较小的。如果您使用的是更大的设备,并且两者都以相同的原理运行,那没关系。
因此,第一步是将双面胶带粘贴到第一台伺服电机的背面。然后将第二台伺服电机粘贴到第一台伺服电机上,第二个电动机的电动机轴应朝下 。
步骤4:构造车身:使用导线
前腿:前三张图片展示了使用尖嘴钳形成前腿的过程。呈V形,如图所示。您以后无论如何都必须将它们弯曲为正确的形状。弯曲的质量取决于所使用的电线。因此,请使其弯曲得尽可能靠近钳子边缘
稀有腿:接下来的六张图片显示了稀有腿的形成。将电线放入伺服喇叭中提供的孔中,然后使用钳子如图所示弯曲电线。如果您对此步骤有任何疑问?请在下面发表评论,我将很乐意为您提供帮助。
现在,借助螺丝刀将支脚固定到伺服电机上。查看图片以便于理解
步骤5:连接
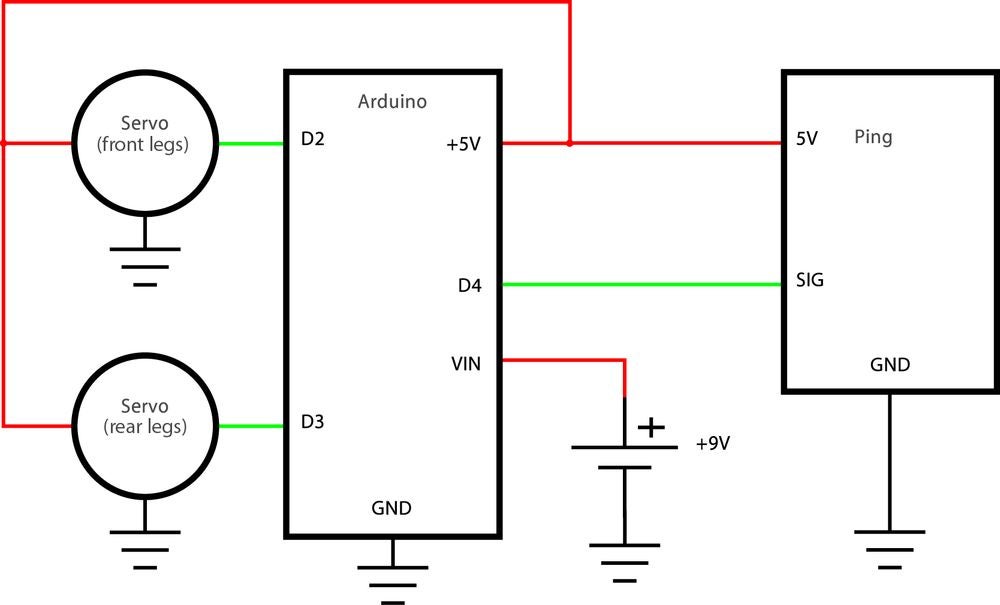
因此连接如下:-
伺服器的深色线(棕线)连接到Arduino的5V引脚。
伺服器的中色线(红线)连接到Arduino的接地引脚。
伺服器的浅色线(黄线)连接到Arduino的数字引脚上
超声传感器的连接如下:-
VCC引脚同时提供给Arduino的数字引脚和5V引脚
接地引脚提供给Arduino的接地引脚
所以现在剩下完成项目的唯一阶段就是编码。
步骤6:编码:
完成后那个工程。将附件中的代码上传到您的arduino,并与您的新机器人一起使用。
-
制作Arduino控制的机器人2023-07-06 1527
-
Arduino伺服电机避障机器人2023-06-29 803
-
如何制作Arduino相扑机器人2022-10-31 1132
-
Arduino和微型伺服系统制作的机器人2022-10-19 1147
-
用Arduino IDE制作一个剑龙机器人2022-08-29 3115
-
自制5合1 Arduino机器人2022-08-23 1993
-
小白学机器人伺服电机模块相关资料分享2021-06-28 1445
-
机器人伺服电机如何选型?2021-06-09 2077
-
安川机器人伺服电机维修,常见机器人伺故障服电机和维修方法2020-06-30 6812
-
蜻蜓机器人制作教程2018-10-03 4695
-
Arduino机器人制作指南2017-06-14 4647
-
自律型机器人制作入门.基于Arduino2016-06-23 5632
-
机器人书籍大全!强烈推荐2015-02-22 35967
-
机械昆虫-六足爬行机器人2014-08-30 8475
全部0条评论

快来发表一下你的评论吧 !
