

步进电机静态转矩特性的测量方法
伺服与控制
描述
步进电机静态转矩特性
步进电机的线圈通直流电时,带负载转子的电磁转矩(与负载转矩平衡而产生的恢复电磁转矩称为静态转矩或静止转矩)与转子功率角的关系称为角度-静止转矩特性,这就是电机的静态特性。如下图所示:
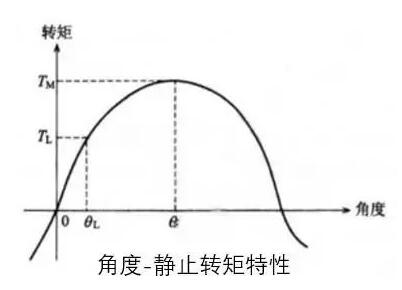
因为转子为永磁体,产生的气隙磁密为正弦分布,所以理论上静止转矩曲线为正弦波。此角度-静止转矩特性为步进电机产生电磁转矩能力的重要指标,最大转矩越大越好,转矩波形越接近正弦越好。实际上磁极下存在齿槽转矩,使合成转矩发生畸变,如两相电机的齿槽转矩为静止转矩角度周期的4倍谐波,加在正弦的静止转矩上,则上图所示的转矩为:
TL=TMsin[(θL/θM)π/2]
其中TL与TM各表示负载转矩和最大静止转矩(或称把持转矩),相对应的功率角为θL和θM,此位移角的变化决定了步进电机位置精度。根据上式得到:
θL=(2θM/π)arcsin(TL/TM)
PM型永磁步进电机和HB混合式步进电机的步距角θs在前面的课程中讲过即:θs=180°/PNr,角度改为机械角度(弧度),则变成下式:
θs=π/(2Nr)
上式Nr为转子齿数或极对数,所以两相电机θM=θs。
步进电机静态转矩特性的测量方法
转矩表:将步进电机固定。如图下图所示,读取转矩表的读数和角度测量仪的读数,依据角度及转矩绘制距角特性曲线,如图如本文前面第一图所示。如不测量角度,只能测出最大静态转矩TM。

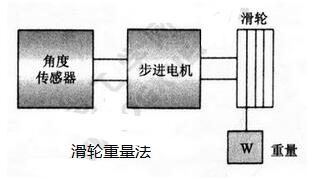
滑轮重量法:如图下图所示,用滑轮和重物代替上图的转矩表。依次改变重物W的重量,利用电位计或编码器测量角度,也能得到与转矩表相同的转矩曲线。
应力计和编码器:前述的两种方法转矩值需要人工读取,测量费时间,且无法自动得出转矩曲线。相对的,如图下图所示,应变计式转矩计与光学式两轴编码器直接与步进电机连接,利用转矩计、编码器和记录仪,能连续测量静态转矩特性。

为了使电机旋转,须使用减速器降低电机转速,齿轮啮合引起的重量变化量很小,此时,须加上比转子惯量大十几倍的飞轮。在齿轮的负载方向要加上重量,以便使齿隙最小。下图的曲线为图上图的方法的试验曲线,调整被试电机的供电电压,测量静态转矩特性。被试电机的尺寸大小为42mm,33mm长,两相HB型,1.8°,35Ω/相,转子惯量15g•cm2。
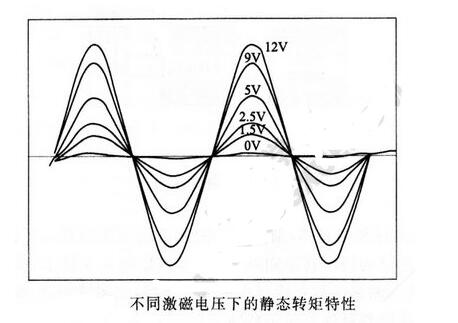
测量时需要用基准重量来校正Y轴的转矩值,利用X-Y记录仪直接读取转矩值。
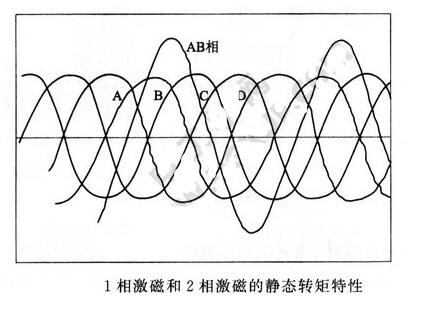
下图为改变激磁相,测量1相激磁和2相激磁的静态转矩特性。可以看出,1相激磁和2相激磁产生的转矩大小和停止位置的不同,即相位差和转矩与图本文第二图所示的关系相同。
-
步进电机的特性测量方法(静态特性)2023-03-23 920
-
步进电机增加动态转矩的解决方法2023-03-21 714
-
步进电机的基本特性2023-02-24 4142
-
步进电机的原理与特性之基本特性 相关资料分享2021-07-08 998
-
步进电机是如何增加动态转矩的?有什么方法吗2021-07-07 1618
-
步进电机基础-步进电机的原理与特性之基础理论2021-06-30 2065
-
步进电机的主要特性与基本特性2019-12-11 13947
-
步进电机动态特性的测量方法2019-10-08 7668
-
一文知道步进电机位置定位精度的解决方法2019-10-07 5250
-
永磁同步电动机齿槽转矩的测量方法图解2018-11-01 7028
-
电机转矩转速测量方法的分析2009-07-07 1158
全部0条评论

快来发表一下你的评论吧 !
