

步进电机动态特性的测量方法
伺服与控制
描述
步进电机动态特性
动态转矩特性包括驱动脉冲频率-转矩特性和驱动脉冲频率-惯量特性。
1)脉冲频率-转矩特性
脉冲频率-转矩特性是选用步进电机的重要特性。如下图所示,纵轴为动态转矩(dynamictorque),横轴取响应脉冲频率,响应脉冲频率用pps作为单位,即每秒的脉冲数表示。
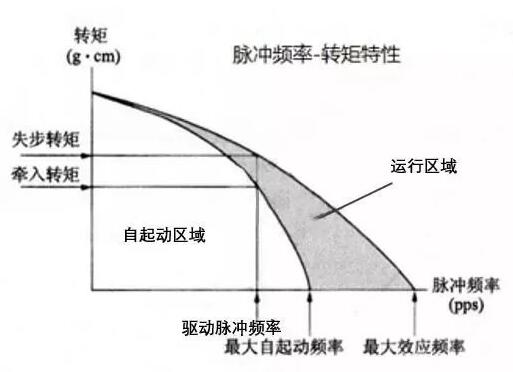
如图所示,步进电机的动态转矩产生包括失步转矩(pull-out-torque)和牵入转矩(pull-in-torque)两个转矩。前者称为失步或丢失转矩,后者称为起动或牵入转矩。牵入转矩范围为从零到最大自起动脉冲频率或最大自起动频率区域。牵入曲线包围的区域称为自起动区域。电机同步进行正反转起动运行,在牵入与失步区域之间为运转区,电机在此区域内可带相应负载同步连续运行,超出范围的负载转矩将不能连续运行,出现失步现象。步进电机为开环驱动控制,其负载转矩与电磁转矩之间要有裕度,其值应为50%~80%。
2)脉冲频率-惯量特性
步进电机在带惯性负载快速起动时,须有足够的起动加速度。因此如负载的惯量增加,则起动脉冲频率就下降,为此,在选择步进电机时对两者要进行综合考虑。
下图纵轴为最大自起动频率,横轴为负载惯量,曲线表示负载惯量与最大自起动脉冲频率之间的关系。此处以PM型爪极步进电机(两相,步距角7.5°)为例。负载PL下,最大自起动脉冲频率PL与负载惯量Jc的关系如下:
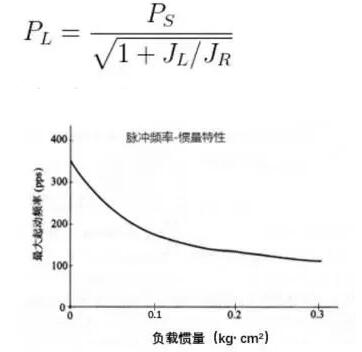
式中,JR步进电机转子惯量,Ps为空载的最大自起动频率。
步进电机动态特性的测量方法
1、滑轮平衡法
此测定电机转矩的方法与普罗尼制动(pronybrake)原理相同。滑轮用线绕几圈,线一端挂弹簧秤,滑轮与线之间产生滑动摩擦测量转矩。下左图表示滑轮平衡法。
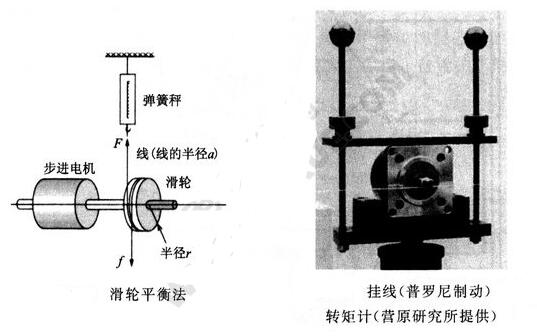
根据左图,转矩T变成下式:
T=(F-f)(r+a)=Fr+Fa-fr-fa
上式中,f为线的张力,F为弹簧力,a为线的半径,r为滑轮的半径。
测量时,如f/F=0.01,a/r=0.01,则上式变成如下:
T=Fr(1-10-4)≈Fr
即式中的f、a被忽略。
此种方式的动态转矩计,釆用营原研究所的挂线(普罗尼制动)方式,电脑画面会显示转矩曲线。其挂线的形式如上右图所示。
2、磁滞制动法
因磁滞制动由低速到高速有稳定的制动力关系,转矩计使用很多,其原理为磁场中的磁滞力将对运行中的被测电机施加制动力制动。此时,反作用转矩会作用到磁滞转子的定子上,此时用测力器(loadcell)测出。
制动力用产生磁场的线圈电流能任意设定。但磁滞转子的惯量大是其缺点,输出转矩为100mN•m以下的小型步进电机普遍采用此方法。
3、扭力棒转矩测量法
利用棒的扭力角与转矩成比例的方法。扭力棒用2组刻度圆盘夹住,转矩加在棒上时,产生的扭力角度θ,用光学方法测量,再由下式计算转矩T:
θ=32LT/(πGD4)
式中,D为扭力棒直径,G为系数。下图表示扭力棒转矩测量法的使用原理。
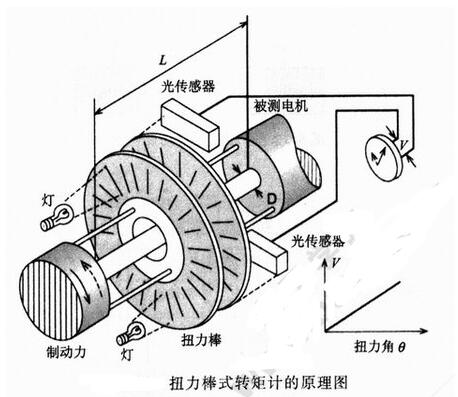
此种试验方法的优点是低惯量、高精度测量。此测力器(应变计)方式要求高灵敏度放大器,以便避免应变计的再调整,以应对转矩信号范围大的缘故。缺点是容易产生扭力振动等问题。
-
步进电机的特性测量方法(静态特性)2023-03-23 920
-
锂电池自放电测量方法2022-07-10 6663
-
请问电机参数的含义及测量方法是什么?2021-10-19 4938
-
工业、科学和医疗射频设备的特性及测量方法2021-08-09 1215
-
步进电机噪声大的原因2021-07-08 2396
-
步进电机是如何增加动态转矩的?有什么方法吗2021-07-07 1618
-
特性阻抗的基本性质、计算和测量方法是什么?2021-04-21 3053
-
同步电机瞬态参数的静止测量新方法2020-04-20 4684
-
步进电机振动的测量方法2019-12-11 5871
-
步进电机静态转矩特性的测量方法2019-10-08 6301
-
一文知道步进电机位置定位精度的解决方法2019-10-07 5242
-
模拟测量方法和数字测量方法2009-07-13 1111
-
步进电动机动态特性的基础理论2007-11-16 800
全部0条评论

快来发表一下你的评论吧 !
