

步进电机改善暂态特性的方法
伺服与控制
描述
步进电机暂态转矩特性
由于步进电机转子惯量作用,即使空载运行一步,也会产生超越角(over-shoot),并在超越角与返回角(under-shoot)之间来回振荡,经过哀减后静止于所定角度,此为步进电机暂态响应特性。
下图表示步进电机的暂态特性,纵轴取转子移动角度,横轴为时间。△T为上升时间,△θ表示超越角,转子自由静止到设定位置的时间(通常到达步距角的士5%误差范围的时间)称为稳定时间(setting time)
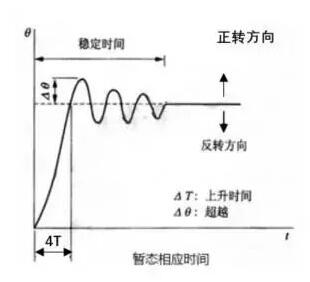
稳定时间越短,快速性越好,为了加快机构的运行速度,使稳定时间变短,步进电机的阻尼(制动)变得很重要,使稳定时间变短的方法有改变摩擦或改变惯量驱动等。
步进电机改善暂态特性的方法
改善的方法有安装阻尼器和利用驱动电路及电机本身的改善等,下面将分别加以说明。
1.利用阻尼器的改善图8.13表示带误差动态阻尼器的步进电机的照片。此种阻尼器是在步进电机轴的飞轮上安装橡胶等特性装置.使飞轮的运动滞后于转轴的运动,利用与转子问的振动相位差对转子进行制动,改善暂态特性。
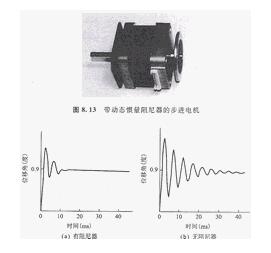
图8.14为带动态惯量阻尼器的步进电机暂态特性的步进响应的比较。此种吸振阻尼器不会像反相制动方法那样,在产生超调后才制动,但也不会消除最初的超调量。
此种动态惯量阻尼器可以改善步进电机高速区域的共振引起的转矩降低.也可以改善高速时的转矩和响应脉冲;2.利用驱动电路的改善(1)半步进1-2相激磁的情况:阻尼以及定位时,利用2相激磁比1相激磁要好。所以两相步进电机使用半步进驱动的1-2相激磁时,停止相采用2相激磁,阻尼会变好。
(2)反相序制动:有关反相序制动,在第5章的图5.28已介绍。此种方法是最佳控制,即在最初的超调能抑制振动。为此介绍反相序制动用闭环回路。
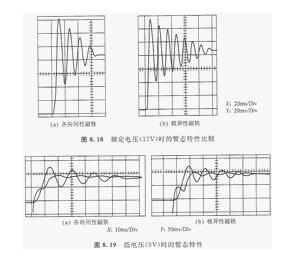
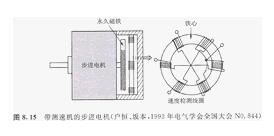
图8.l5表示步进电机及其后轴所带的测速机结构。由测速机得到转子速度,在最佳时刻作反相序制动,其反相序激磁的电路框图见图8.16。图8.17为有/无反相序制动的对比。因为闭环控制可在最佳的速度时间进行制动。
(3)驱动电路输出段的结构:根据图8.2所示驱动电路输出段结构一当功率管off时,尖峰吸收电路的导通,产生的制动转矩变大。图8.2的①为制动转矩最小的结构。在高速时的转矩会降低,故要考虑转矩与制动转矩两者状态最佳时的驱动电路。
-
步进电机改善暂态特性的解决方法2023-03-24 684
-
步进电机的特性测量方法(静态特性)2023-03-23 920
-
步进电机的基本特性2023-02-24 4142
-
步进电机的原理与特性之基本特性 相关资料分享2021-07-08 998
-
什么是步进电机的暂态特性?如何去改善步进电机的暂态特性?2021-07-07 1587
-
什么是暂态分析?暂态分析的内容和方法是什么?2021-07-06 3113
-
步进电机暂态(阻尼)特性的测量2019-12-11 5548
-
步进电机控制中串联电阻发热要如何改善?2019-02-27 5931
-
步进电机工作效率如何_步进电机的选择方法2018-04-25 5555
全部0条评论

快来发表一下你的评论吧 !
