

透光型编码器的结构是什么
电子说
描述
透光型编码器主要由四部分结构构成——①LED发光素子;②透镜;③码盘;④受光IC。
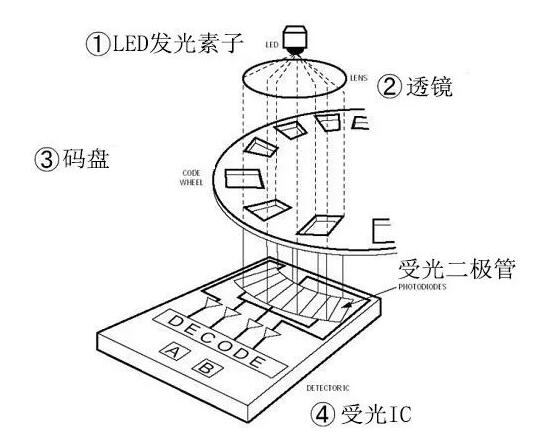
首先LED发光素子的光是错乱光。通过透镜将光集中在一起并转化成平行光。码盘上等分地开通若干个长方形孔(有通光也有不通光)。射到受光IC上的发光二极管等电子元件上,通过信号转换电子部进行处理,最后输出“A相”,“B相”两种方波。
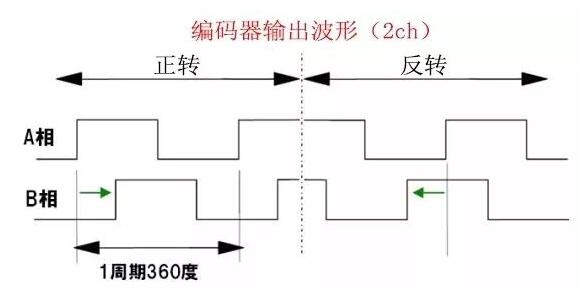
A相同B相的相位关系是世界通用的,B相同A相相差1/4周期输出。通过处理A相与B相这两种编码器输出,就能够清楚电机的旋转方向,旋转位置以及旋转速度。那么下面我们就讲讲如何将他们检测出来的。
旋转方向的检测
通过检测A,B相的出现先后顺序,可以判别旋转轴的旋转方向。比如说编码器码盘顺时针旋转的时候,B相会比A相晚出现。如果码盘逆时针旋转时,B相就会先于A相出现。这样的结构不单单可以用来判别旋转方向可以用来判别水平驱动时的移动方向。
旋转位置的检测
码盘(光栅盘)是在一定直径的圆板上等分地开通若干个长方形孔。在这里我们家测一周有360个长方形孔。因为每个长方形孔输出一个脉冲信号,所以可以检测出每个脉冲相同于一度的旋转位置。如果1周有3600个长方形孔的话,同理可以检测出0.1度的角度。
旋转速度的检测
测出编码器输出的脉冲频率和编码器分辨率,再根据下方公式很容易就能算出编码器的速度。
转速(r/min)=(脉冲频率/分辨率)*60
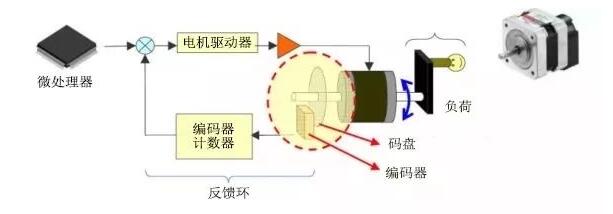
灵活运用编码器就可以控制电机的旋转方向、旋转位置、旋转速度。还是用之前提到的电梯那个例子,如图4微处理器发出控制信号驱动电机,安装在电机轴上的编码器输出信号。之后用编码器计数器处理编码器输出,同微处理器的控制信号进行差动比较。通过比较驱动电机的控制信号和电机旋转的结果,只向电机提供目标转数所需要的电量。在这种封闭结构中进行比较演算的形态,我们称之为闭合回路(闭环)。
-
增量型编码器与绝对值型编码器怎么选择?2025-07-10 2072
-
磁电编码器和光电编码器的区别2024-10-12 5111
-
编码器好坏怎么判断,编码器原理2024-01-23 3797
-
磁性编码器结构及原理2024-01-22 3171
-
增量型编码器和绝对值编码器控制位置一样吗2023-08-18 2053
-
增量型编码器与绝对值编码器2023-05-08 3720
-
编码器的分类、特点及其应用详解2017-12-06 37300
-
电子编码器的结构及使用2017-11-10 9779
-
增量式光电编码器结构和原理2016-09-12 6686
-
编码器元件及其应用2012-04-05 7296
-
RHI 74 增量型旋转编码器2010-10-08 886
-
编码器,编码器是什么意思2010-03-08 3466
-
光电式绝对编码器2009-10-29 6025
-
增量型编码器与绝对型编码器的区别2009-09-26 3109
全部0条评论

快来发表一下你的评论吧 !
