

九轴传感器之磁力计
描述
上海润欣科技股份有限公司创研社
前面几篇着重介绍了九轴姿态传感器中的三轴加速度计和三轴陀螺仪,在本篇中继续为大家介绍九轴传感器中的三轴磁力计。所谓的磁力计就是通过测量磁场强度和方向来定位设备的方位的传感器。下面我们介绍一下其工作原理。
磁传感器就是感应环境磁场的变化,并把它转换为电信号,从而测量出对应物理量的器件,主要应用在电子罗盘、磁场感应器、位置感应器等方案中。见图1,磁传感器广泛采用AMR材料(Anisotropic Magneto-Resistance),如铁、钴、镍及其合金等;AMR特性是指当外部磁场与磁体内建磁场方向成零度角时, 电阻是不会随着外加磁场强度变化而发生改变的,但当外部磁场与磁体的内建磁场有一定角度的时候, 磁体内部磁化矢量会偏移,从而磁场方向和电流方向也会随之变化,导致电阻阻值也将发生变化;从图1中可以看到,当电流方向和磁体内磁化方向成45度角度时,外部磁场给磁阻所引起的电阻变化呈现出的是线性关系,所以磁传感器在没有外部磁力影响时候的初始角度设定为45度,利用这个线性关系再通过惠斯通电桥即可得到外界磁场值。
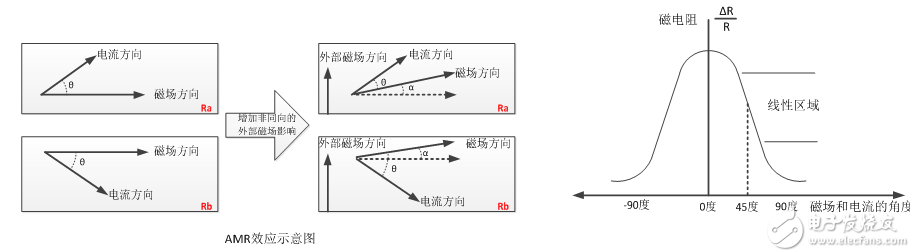
图1
如图2所示即为惠斯通电桥,由四个磁阻组成磁传感器,其中R1和R4对应图1中的Rb,R2和R3对应图1中的Ra,一旦受到图1一样方向的外部磁场影响,则R1和R4的阻值会减少∆R,而R2和R3的阻值会增加∆R。
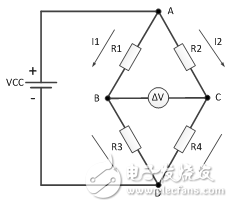
图2
下面我们分别采用欧姆定律来计算B点和C点的电压Vb和Vc。
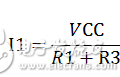
流过R1和R3的电流I1为
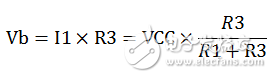
B点的电压为
同样的,C点电压为

这样我们就可以得出B点和C点的压差∆V
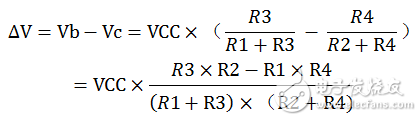
假设R1/R2/R3/R4的初始值为R,阻值变化为∆R,则R1和R4的值为R-∆R,R2和R3的值为R+∆R,最终形成值为

从以上公式可以看出,在外部磁场的作用下电阻变化为∆R时,∆V的值和∆R现成正比关系,这就是磁力计的工作原理。
-
九轴传感器为什么是“九轴”?有什么应用呢?2025-02-11 2218
-
十轴姿态传感器模块 | 集成加速度计、陀螺仪、磁力计,自带BLE5.0蓝牙2025-01-06 2130
-
磁力计LIS2MDL开发(4)----MotionMC 执行磁力计校准2024-08-26 5087
-
IIS2MDC磁力传感器相关资料2023-09-13 736
-
浅析IMU中加速度计、陀螺仪、磁力计原理2023-03-02 6201
-
如何使用这款QMC5883L磁力计呢2022-02-11 2388
-
ADIS16400:带磁力计的三轴惯性传感器数据表2021-05-23 1039
-
ADIS16405:带磁力计的三轴惯性传感器数据表2021-05-09 982
-
IMU中三轴加速计、陀螺仪和磁力计的工作原理2020-12-26 17000
-
技术分享:九轴传感器之磁力计2020-12-25 2446
-
九轴传感器之加速度计是怎么回事2020-03-24 3759
-
如何在LIS3MDL磁力计传感器中禁用DRDY和INT输出2019-04-17 3304
-
深迪半导体推出首款三轴磁力计ST480MQ2012-09-10 2819
全部0条评论

快来发表一下你的评论吧 !
