

STC系列单片机内部AD的应用资料和程序及typedef与define的区别说明
电子说
描述
STC89LE52AD、54AD、58AD、516AD这几款89系列的STC单片机内部自带有8路8位的AD转换器,分布在P1口的8位上,当时钟在40MHz以下时,每17个机器周期可完成一次AD转换。
与AD相关的几个寄存器如表1所示。

P1_ADC_EN:P1.X口的AD使能寄存器。
相应位设置为“1”时,对应的P1. X口作为AD转换使用,内部上拉电阻自动断开。
ADC_CONTR:AD 转换控制寄存器。
ADC_START:AD转换启动控制位,设置为“1”时,AD开始转换。
ADC_FLAG:AD转换结束标志位,当AD转换完成后,ADC_FLAG=1。
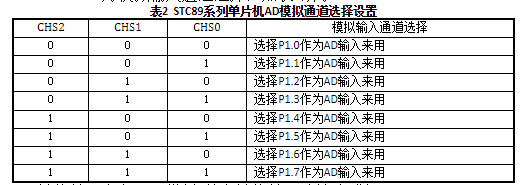
CHS2、CHS1、CHS0:为模拟输入通道选择,如表2所示。
ADC_DATA:AD 转换结果寄存器。模拟/数字转换结果计算公式如下:
结果=256×Vin / Vcc
Vin为模拟输入通道输入电压,Vcc为单片机实际工作电压,用单片机工作电压作为模拟参考电压。
下面一个例程演示STC89LE516AD/X2系列单片机的A/D转换功能。 时钟11.0592MHz, 转换结果以16进制形式输出到串行口,可以用串行口调试程序观察输出结果。(本代码摘自宏晶科技芯片手册,经作者调试可正常运行)。
新建文件part3.4.5.c,程序代码如下:
#include 《reg52.H》
#include 《intrins.H》
// 定义与 ADC 有关的特殊功能寄存器
sfr P1_ADC_EN = 0x97; //A/D转换功能允许寄存器
sfr ADC_CONTR = 0xC5; //A/D转换控制寄存器
sfr ADC_DATA = 0xC6; //A/D转换结果寄存器
typedef unsigned char INT8U;
typedef unsigned int INT16U;
void delay(INT8U delay_time) // 延时函数
{
INT8U n;
INT16U m;
for (n=0;n《delay_time;n++)
{
for(m=0;m《10000;m++);
}
}
void initiate_RS232(void) //串口初始化
{
ES = 0; // 禁止串口中断
SCON = 0x50; // 0101,0000 8 位数据位, 无奇偶校验
T2CON = 0x34; // 0011,0100, 由T2 作为波特率发生器
RCAP2H = 0xFF; // 时钟11.0592MHz, 9600 波特率
RCAP2L = 0xDB;
ES = 1; // 允许串口中断
}
void Send_Byte(INT8U one_byte) // 发送一个字节
{
TI = 0; // 清零串口发送中断标志
SBUF = one_byte;
while (TI == 0);
TI = 0; // 清零串口发送中断标志
}
INT8U get_AD_result(INT8U channel)
{
INT8U AD_finished = 0; // 存储 A/D 转换标志
ADC_DATA = 0;
ADC_CONTR = channel; // 选择 A/D 当前通道
delay(1); //使输入电压达到稳定
ADC_CONTR |= 0x08; //0000,1000 令 ADC_START = 1, 启动A/D 转换
AD_finished = 0;
while ( AD_finished == 0 ) // 等待A/D 转换结束
{
AD_finished = (ADC_CONTR & 0x10); //0001,0000, ADC_FLAG ==1测试A/D转 换结束否
}
ADC_CONTR &= 0xF7; //1111,0111 令 ADC_START = 0, 关闭A/D 转换,
return (ADC_DATA); // 返回 A/D 转换结果
}
void main()
{
initiate_RS232();
P1 = P1 | 0x63; // 0110,0011,要设置为 A/D 转换的P1.x 口,先设为高
P1_ADC_EN = 0x63; //0110,0011, P1 的P1.0,P1.1,P1.5,P1.6 设置为 A/D 转换输入脚
// 断开P1.0,P1.1,P1.5,P1.6 内部上拉电阻
while(1)
{
Send_Byte(get_AD_result(0)); //P1.0 为 A/D 当前通道, 测量并发送结果
delay(0x200);
Send_Byte(get_AD_result(1)); //P1.1 为 A/D 当前通道, 测量并发送结果
delay(0x200);
Send_Byte(get_AD_result(5)); //P1.5 为 A/D 当前通道, 测量并发送结果
delay(0x200);
Send_Byte(get_AD_result(6)); //P1.6 为 A/D 当前通道, 测量并发送结果
delay(0x200);
Send_Byte(0); // 连续发送 4 个 00H, 便于观察输出显示
Send_Byte(0);
Send_Byte(0);
Send_Byte(0);
delay(0x200); // 延时
delay(0x200);
delay(0x200);
delay(0x200);
delay(0x200);
delay(0x200);
}
}
知识点:typedef与#define的区别
typedef:类型定义,其功能是用户为已有数据类型取“别名”。
如:typedef int INT; 意思是将int重新定义为INT,以后使用INT a;就相当于int a;
用typedef定义数组、指针、结构等类型将带来很大的方便,不仅使程序书写简单,而且使意义更为明确,因而增强了可读性。例如:typedef int a[10];表示a是整型数组类型,数组长度为10,然后就可用a定义变量,如:a s1,s2;完全等效于:int s1[10],s2[10];
define:宏定义。
如:#define PI 3.14 意思是以后程序中出现PI的地方将用3.14代替,这个替换是在编译预处理阶段完成的,注意#define最后没有分号,否则编译时将分号一同带入PI中。
-
C语言typedef与#define的用法和区别2022-10-12 3533
-
C语言#define和typedef的区别2022-11-03 1232
-
STC单片机内部EEPROM读写编程经验2012-08-15 12279
-
单片机内部2017-07-08 2174
-
STC系列单片机内部AD的应用程序2018-07-13 2696
-
请问如何设定STC15系列单片机内部时钟频率?2020-04-23 4586
-
typedef和#define的区别2021-02-05 1552
-
STC单片机内部扩展RAM的应用2011-09-28 7126
-
STC最新1T8051单片机内部EEPROM测试C语言程序2012-01-24 2188
-
宏晶单片机内部EEPROM测试程序2015-11-16 762
-
STC单片机内部EEPROM记录开机次数(c语言)2015-11-23 1351
-
STC-ISP_V35单片机程序下载工具2016-06-22 1140
-
typedef和define的介绍及本质区别2018-04-14 5662
-
STC89C52单片机内部EEPROM驱动的使用源代码免费下载2019-09-11 1392
-
STC15F2K60S2单片机内部EEPROM读写操作的介绍2023-11-08 4251
全部0条评论

快来发表一下你的评论吧 !
