

pid控制原理实例说明
电子说
1.4w人已加入
描述
PID三个字母是比例,积分,微分的英文首字母缩写。可见这三个功能在系统中都起作用,只是负责的功能不同。
别一看有微积分就吓的不行,认为比较难,其实不是的,下面我就用大白话给你说一下吧,了解原理就行了,我感觉没必要套用教课书上的模式,弄一大堆公式。我再给你画几张图,很容易就明白的。
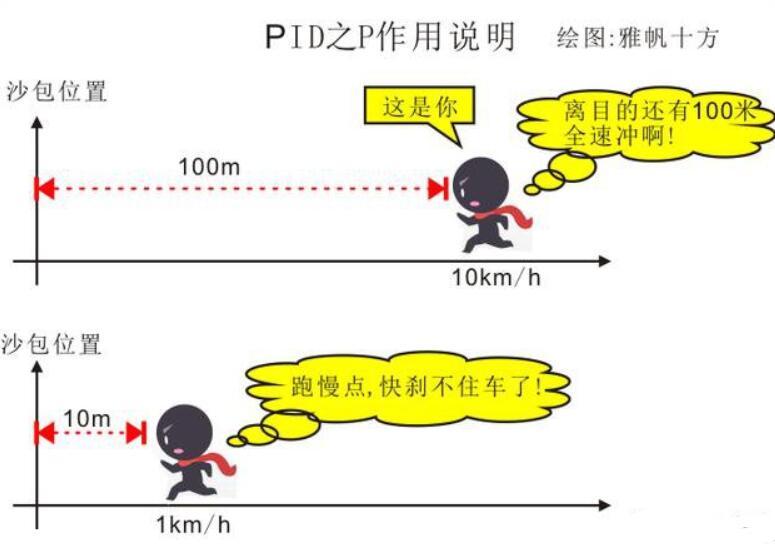
一、比例调节P
很实际一个例子,比如你跑向一个终点,当你离终点很远时会全速跑,快接近终点时你会降速,基本上到达终点了,你也停下来了。那么这个模型用图画出来就是这个样子的。
这里的100米,10米就是误差,误差越大,你跑的就越快,如果用数学建模的话,就是误差乘以一个系数,这个系数就是PID中的P(比例)。
这个图中的比例就是100,你看100m时,乘以100你就用10km/h去跑,10m时乘以100你就用1km/h去跑。
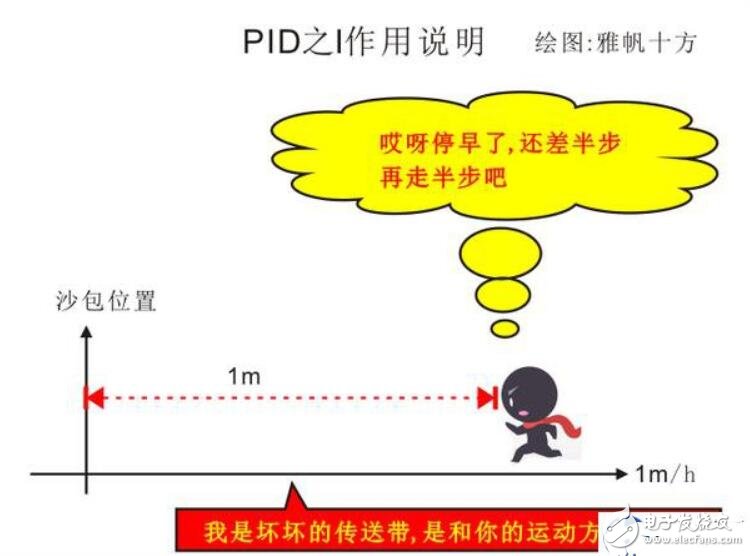
二、积分调节I
积分调节只有你在快接近目标时才起主要作用。比如说离目标还有1m时。积分是调节误差的,并且是随着时间是累计的(时间越大,这个误差表现的越明显,因为是误差乘以时间),这个时候就要考虑传送带的因素了。比如现在是1米,你不向前走一步去补偿就拿不到沙包,并且随着时间的流失,你是会向后移动的。误差会越来越大,1米,2米。
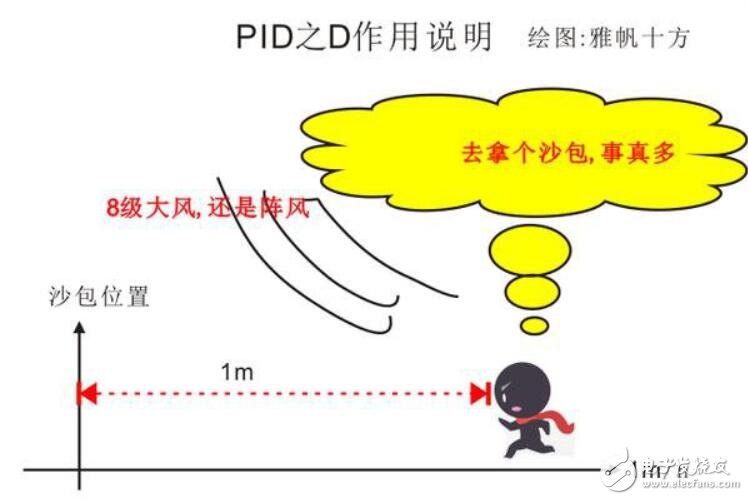
三、微分调节D
微分就是调节变化的快慢。比如说这时候有个8级大风,哎呀你老惨了。
注意我说的风是阵风,就是一阵有一阵没的那种,以体现变化量。8级大的风对你的速度肯定有影响的。
那么这个时候你就会自动根据风的大小调节速度。风大你就多使点劲,风小你就少使点劲。这个使劲的多少就是微分系数。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
使用Model Composer设计PID控制器的Versal ACAP应用说明2023-09-14 676
-
PID控制器概述与制作实例2022-07-10 7931
-
控制温度PID实例2022-05-13 1078
-
PID调节控制做电机速度控制说明2022-04-06 1223
-
第五章:PID控制算法控制算法2021-06-04 1527
-
PID控制及matlab仿真简介2021-06-01 1226
-
位置式PID控制原理2021-04-27 1170
-
典型的PID控制介绍2021-04-19 1072
-
先进PID控制及其MATLAB仿真的详细资料说明2019-02-25 1598
-
STM32的PID算法实例2018-09-19 14902
-
13个基于PID控制器的设计实例2017-11-15 7625
-
PID温度控制实例2015-08-27 38944
-
单片机的PID控制应用方法2011-10-10 1761
-
基于Linux的实时数字控制系统设计2009-09-08 720
全部0条评论

快来发表一下你的评论吧 !
