

三种微型电机驱动电路分析
伺服与控制
描述
用于3V供电的微型直流电机的驱动,这种电机有两根引线,更换两根引线的极性,电机换向。该驱动电路要求能进行正反转和停止控制。
微型电机驱动电路(一)
如下图所示,这电路是作者最初设计的电路,P1.3、P2.2和P2.4分别是51单片机的IO引脚。设计的工作原理是:当P1.3高电平、 P2.2和P2.4都为低电平时,电机正转。此时,Q1和Q4导通,Q2和Q3截止,电流注向为+5VàR1àQ1àMàQ4;当P1.3低电平、 P2.2和P2.4都为高电平时,电机反转。此时,Q2和Q3导通,Q1和Q4截止。P2.2为高电平同时P2.4为低电平时,电路全不通,电机停止。
图中电阻:R1=20Ω,R2=R3=R4=510Ω
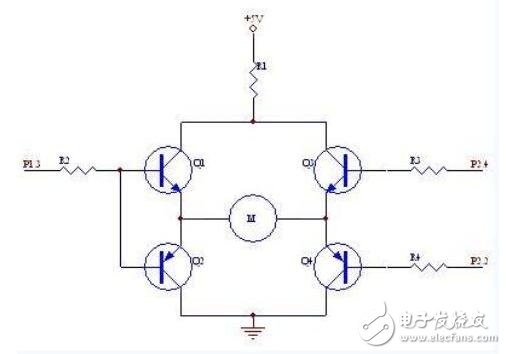
但实际实验情况去出人意料,即电机正向和反向都不转。经测量,当P1.3高电平,P2.2和P2.4都为低电平时,Q4导通,但Q1不导通,P1.3的电平只有0.67V左右,这样Q1无法导通。
经分析原因如下:51的P1、P2、P3各引脚都是内部经电阻上拉,对地接MOSFET管,所谓高电平,是MOSFET截止,引脚上拉电阻拉为高电平。若此内部上拉电阻很大,比如20K,则当上图电路接上后,则流过Q1的b极的电流最大为(5-0.7)/20mA=0.22mA,难以动Q1导通。所以此电路不通。
总结:51单片机的引脚上拉能力弱,不足以驱动三极管导通。
微型电机驱动电路(二)
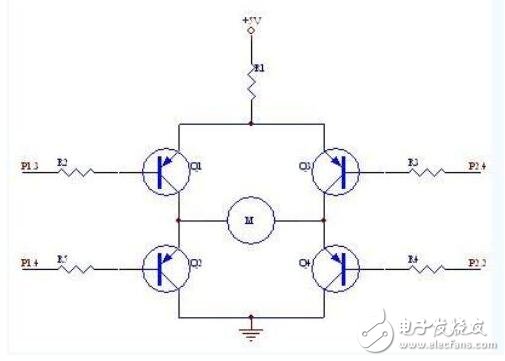
如下图所示:这个电路中四个三极管都采用PNP型,这样,导通的驱动是控制引脚输出低电平,而51的低电平时,是通过MOSFET接地,所以下拉能力极强。
但此电路的Q1和Q3需要分别控制,所需控制引脚较多。如果要用一个IO脚控制则可以加一个反相器。
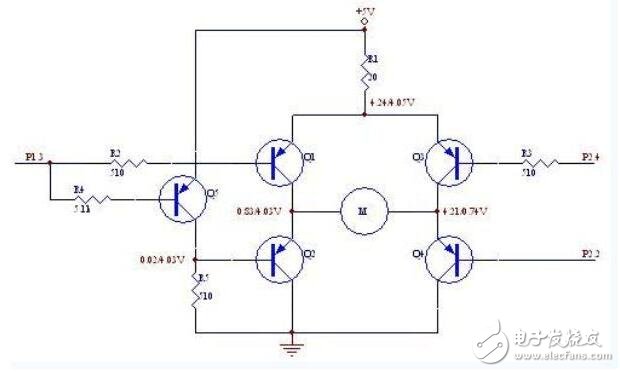
但此电路的Q1和Q3需要分别控制,所需控制引脚较多。如果要用一个IO脚控制则可以加一个反相器。如图3所示。图中标有各点实测电压值。
微型电机驱动电路(三)
在电路二中,由于Q2和Q4的发射极高出基极一个0.7V,而基极最低为0V,实际由于CPU引脚内部有MOSFET管压降,所以Q2和Q4的发射极不会低于1V,这样使M两端的有效电压范围减小。
要解决这一问题,则Q2和Q4需换成NPN管。但NPN管的驱动如电路一所示,只靠CPU引脚的上拉是不行了,所以需要另加上拉电阻,如下图所示。
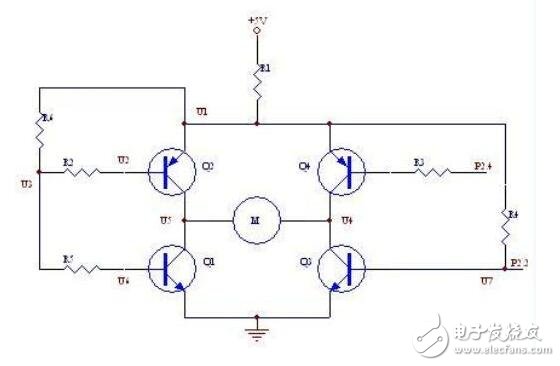
上图中,与电路一不同的是两只NPN管移到了下方,PNP在上方,这样,Q1和Q3的集电极的电位最低可达到一个管压降(0.3V)。这样增加了M的压降范围。
但为了保证对NPN管的足够的驱动,P1.3和P2.2必须加上拉电阻,如图所示。图中,R2、R5、R6都不可少。所以这种电路的元件用量比较大。
还有,R5应该比R6大几倍,比如10倍,这样,当Q1导通时,P1.3处的电压可以分得较大,不致于使Q2导通。如果R5太小或为0,则当Q1导通时,由于P1.3处的压降只有0.7V左右,将使Q2也导通。
经过试验,R2、R6、R3、R4可取510Ω,R5取5.1kΩ。这种值下各处的电压如下(R1为20欧):
U1:4.04U2:2.99U3:3.87U4:4.00U5:0.06U7:0.79
-
伺服电机的三种控制方式2022-08-17 8322
-
步进电机三种驱动方案介绍2011-02-17 276
-
步进电机的三种驱动方式2016-01-12 18425
-
步进电机驱动器三种基本驱动模式2018-08-31 8772
-
半导体三极管的三种基本放大电路的三种连接法电路图2009-05-06 6104
-
步进电机常见的三种通电方式2009-07-31 11064
-
微型电机驱动电路原理分析及实验2009-12-24 3892
-
微型电机驱动电路实验分析2010-12-27 1771
-
三极管三种放大电路2016-05-19 2486
-
电路的三种工作状态分别是什么2019-09-13 103868
-
步进电机驱动器的三种驱动模式2020-03-22 16218
-
三种驱动H桥的效率计算方法解析2021-04-09 6074
-
三种IGBT驱动电路和保护方法2021-09-17 3711
-
PWM信号输出的三种硬件驱动方式2023-10-30 3162
-
放大电路有哪三种基本分析方法?举例说明2024-02-25 5281
全部0条评论

快来发表一下你的评论吧 !
