

基于GD32F130的冰箱压缩机变频板方案
描述
冰箱压缩机变频方案概述
本文介绍的变频板可用于冰箱压缩机变频控制,同时也可用于油烟机,空调内风机的变频控制。方案基于兆易创新GigaDevice的GD32F130系列MCU设计,MCU配备Cortex-M3内核,可软件实现PI控制,SVPWM生成器,电机状态观测器;一个高级定时器可直接产生6路互补死区可调PWM, 芯片满足工业级的工作温度和ESD, EMI标准,非常适合于PMSM, BLDC的变频调速控制。
GD32F130系列MCU主要规格
Cortex-M3@48Mhz, 50 MIPS的处理性能;
Flash:64KB/32KB/16KB;
SRAM:8KB/4KB/4KB;
高速高精度ADC, 12Bits ADC x 1@2.6Msps,10通道;
高级定时器x1,可产生6路死区可调的互补PWM输出。通用定时器x6;
Flash带硬件加密保护;
多种串行通讯方式:I2C x2, SPI x2, UART x2;
丰富的封装类型:TSSOP20/ QFN28/ QFN32/ LQFP32/ LQFP48/LQFP64
工业级的工作温度范围:-40℃~+85℃;
工业级的ESD特性:6000 Volt;
变频板主要规格参数
额定输出功率200W,310V母线电压,最大工作电流2A;
磁场定向法,正弦波电流,无传感器启动及控制;
3电阻电流采样;
逆变电路由6个Power MOSFET搭建成;
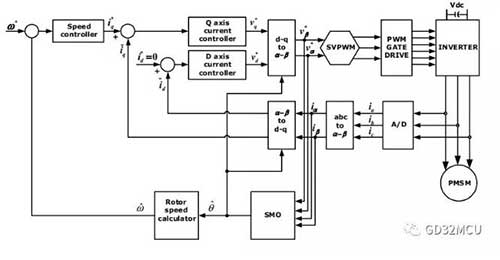
电机控制系统控制框图如下:
MTPA的实现
如系统框图所示,整个系统为双闭环控制,内环为电流控制环路,外环为速度控制环路。设定转子磁通方向为d-axis,q-axis是d-axis的正交轴向,电流环路的控制目的是为了将定子的电流和磁通解耦,将定子的电流都控制到q-axis上。
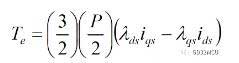
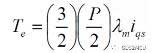
针对于SPM电机,我们将d-axis的目标控制量id设为0,将定子上的电流全部控制到q-axis上,从而获得Maximum Torque Per Ampere(MTPA)。此时,PMSM电机的转矩和转速只与q-axis的电流分量有关,我们再通过速度控制环路来控制d-axis上的电流,实现双闭环控制。
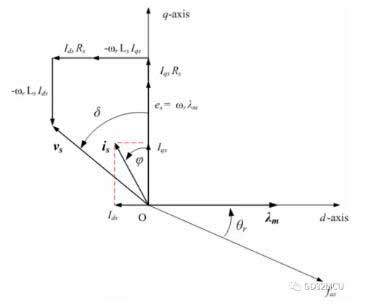
在实际的工作中,由于SPM电机的结构并不是理想情况,d-axis上的实际电流也并不为0;同时,我们也会有目的的去控制d-axis上的电流,从而实现电机超出基速运转;此时,我们需要在d-axis上面加上弱磁控制器,从而确保MTPA的实现。SPM电机运转时的矢量图如下:
FOC的实现
PMSM电机实际接线时有a,b,c三相电流,我们现在需要把a,b,c三相电流与D axis电流和Q axis电流联系起来,需要用到Clark 和Park 这2个数学变换:
•Clark变换:(a,b,c)→(α,β),α,β为两相正交静止的坐标系;

•Park变换:(α,β)→(D,Q), D,Q为两相正交旋转坐标系,其中θ是转子磁通位置;

通过Clark和Park两个数学变化,我们可以将PMSM电机的a,b,c三相电流分解到D axis和Q axis上来,从而实现磁场定向控制(FOC)。我们还可以发现,整个FOC控制的关键点在于找到转子的磁通位置θ。
SVPWM的实现
我们利用反Park变换也可以将定子的电流从D,Q空间转换到α,β空间下,完成了磁场定向后,PMSM电机控制的最后一步就是要产生作用在电机三相端子上的PWM电压。根据三相逆变器的8种开关状态,我们可以列出空间矢量调制逆变器状态表:
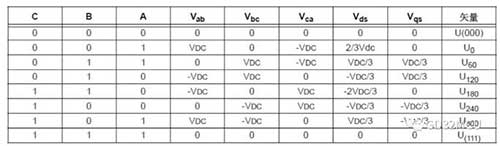
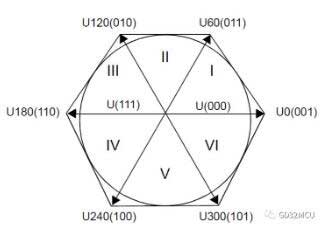
其中A,B,C三相都为0和1时为无效状态,我们将这两个状态矢量放置在空间的原点,其余6个矢量状态U0→U300刚好在空间绘成一个正6边形。传统的6步法控制电机就是将这6个电压向量依次加在电机的定子端。
空间矢量调制(SVPWM)的目的是在矢量空间内形成一个360度等幅旋转的电压矢量,从而减少逆变器输出的电流谐波成分,降低转矩脉动。SVPWM的实现方法,则是利用相邻的两个基本电压矢量来合成矢量空间中的旋转电压矢量Uout,Uout的最大值约为0.886*VDC。举第一象限为例,
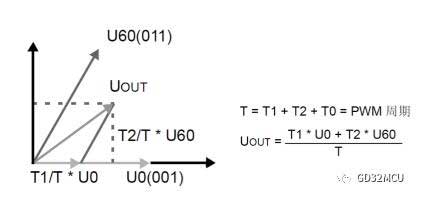
其中,T1为电压矢量U0在一个PWM周期内的作用时间,T2为电压矢量U60在一个PWM周期内的作用时间,T0为零序分量的作用时间。
我们先利用V_α和V_β的值确定扇区sector,再根据三角函数和Vdc的值计算出T1,T2和T0的值。
A= V_β;
B= 1.7320508*V_α-V_β;
C= -1.7320508*V_α-V_β;
if(A>= 0) {a= 1;} else a= 0;
if(B>= 0) {b= 1;} else b= 0;
if(C>= 0) {c= 1;} else c= 0;
N=a+2*b+4*c;
switch(N)
{
case 1: sector = 2; break;
case 2: sector = 6; break;
case 3: sector = 1; break;
case 4: sector = 4; break;
case 5: sector = 3; break;
case 6: sector = 5; break;
default: break;
}
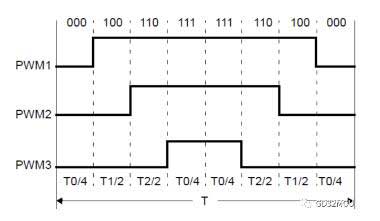
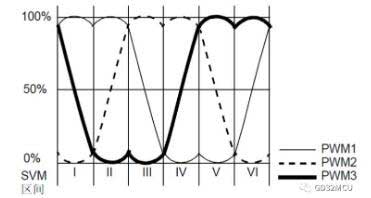
为了减少逆变器电路中MOSFET的开关次数,可以使用7段空间矢量合成方式,在每个矢量扇区内均以零矢量(000)开始和结束,中间用零矢量(111),其余时间用有效矢量。如下图所示:
SVPWM电压加在PMSM电机的三相端子上后,可以看到马鞍形的相电压波形,如下图所示:
转子角度观测器的实现
找到转子磁通的位置θ是FOC算法的关键,但在电机高速转动的过程中,Hall传感器的精度不够导致无法精确找到转子的磁通位置θ,此时需要用到转子角度观测器。转子磁通的角度信息,可以从反电动势中获取到,我们无法直接测量到电机的反电动势,但是可以用观测器的方法,计算出反电动势的值。
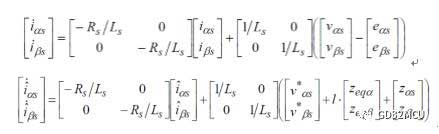
选观测器电流与真实电流的误差值为滑模控制面S,
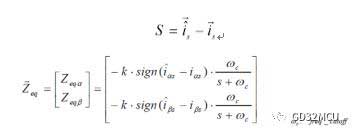
如果滑模增益K足够大的情况下,我们可以找到一个滑模控制面S,使得
滑模观测器的系统框图如下:
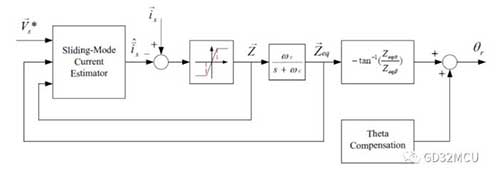
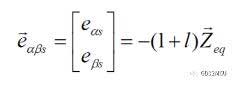
如果要确保滑模控制面S的稳定,我们需要选取有效的K和l值,保证
并且l值必须大于-1。最后转子的角度θ便可以通过反正切函数计算出来。
GD32F130系列MCU可以轻松实现上述的SVPWM产生器,Park/Clark变换,PI控制器,以及转子位置观测器。MCU内置的高速高精度SAR ADC和多级中断系统可以确保闭环控制的实时性。
GD32F130冰箱变频板
正面图片

反面图片
-
请问st-link/v2可以烧录gd32f130吗?2023-11-07 1076
-
基于FM33LF013的冰箱压缩机变频方案2023-08-01 2856
-
基于ACM32 MCU的冰箱压缩机变频方案2023-05-23 2625
-
实现能效升级 | 基于ACM32 MCU的冰箱压缩机变频方案2023-05-22 2211
-
GD32F130 数据表2023-02-22 757
-
基于SH79F2201的变频冰箱压缩机方案2022-09-01 4320
-
基于GD32F130F8微控制器设计的GD32F130最小系统板2022-08-16 2211
-
怎样去使用GD32F130去开发项目呢2022-02-17 1242
-
怎样去编写GD32F130的入门程序呢2022-01-26 1003
-
GD32F130 使用ST库开发项目2021-12-22 1602
-
GD32F130入门程序2021-12-02 1327
-
冰箱压缩机的作用_冰箱压缩机修理价格是多少2020-04-01 4802
-
利用GD32F130系列MCU设计冰箱压缩机变频板方案的介绍和应用分析2019-10-21 8157
-
设计笔记 | 采用GD32F130系列MCU设计冰箱压缩机变频板方案2019-04-02 4226
全部0条评论

快来发表一下你的评论吧 !
