

fireflyAIO-3399J主板I2C使用介绍
描述
I2C 使用
简介
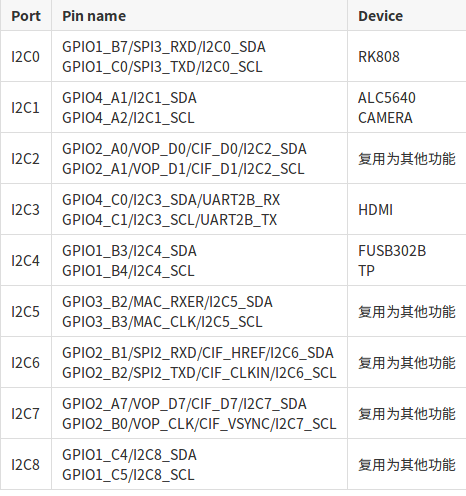
AIO-3399J 开发板上有 9 个片上 I2C 控制器,各个 I2C 的使用情况如下表:
本文主要描述如何在该开发板上配置 I2C。
配置 I2C 可分为两大步骤:
定义和注册 I2C 设备
定义和注册 I2C 驱动
下面以配置 GSL3680 为例。
定义和注册 I2C 设备
在注册I2C设备时,需要结构体 i2c_client 来描述 I2C 设备。然而在标准Linux中,用户只需要提供相应的 I2C 设备信息,Linux就会根据所提供的信息构造 i2c_client 结构体。
用户所提供的 I2C 设备信息以节点的形式写到 dts 文件中,如下所示:
kernel/arch/arm64/boot/dts/rockchip/rk3399-firefly-mini-edp.dts &i2c4 { status = "okay"; gsl3680: gsl3680@41 { compatible = "gslX680"; reg = <0x41>; screen_max_x = <1536>; screen_max_y = <2048>; touch-gpio = <&gpio1 20 IRQ_TYPE_LEVEL_LOW>; reset-gpio = <&gpio0 12 GPIO_ACTIVE_HIGH>; }; };
定义和注册 I2C 驱动
定义 I2C 驱动
在定义 I2C 驱动之前,用户首先要定义变量 of_device_id 和 i2c_device_id 。
of_device_id 用于在驱动中调用dts文件中定义的设备信息,其定义如下所示:
static struct of_device_id gsl_ts_ids[] = { {.compatible = "gslX680"}, {} };
定义变量 i2c_device_id:
static const struct i2c_device_id gsl_ts_id[] = { {GSLX680_I2C_NAME, 0}, {} }; MODULE_DEVICE_TABLE(i2c, gsl_ts_id);
i2c_driver 如下所示:
static struct i2c_driver gsl_ts_driver = { .driver = { .name = GSLX680_I2C_NAME, .owner = THIS_MODULE, .of_match_table = of_match_ptr(gsl_ts_ids), }, #ifndef CONFIG_HAS_EARLYSUSPEND //.suspend = gsl_ts_suspend, //.resume = gsl_ts_resume, #endif .probe = gsl_ts_probe, .remove = gsl_ts_remove, .id_table = gsl_ts_id, };
注:变量id_table指示该驱动所支持的设备。
注册 I2C 驱动
使用i2c_add_driver函数注册 I2C 驱动。
i2c_add_driver(&gsl_ts_driver);
在调用 i2c_add_driver 注册 I2C 驱动时,会遍历 I2C 设备,如果该驱动支持所遍历到的设备,则会调用该驱动的 probe 函数。
通过 I2C 收发数据
在注册好 I2C 驱动后,即可进行 I2C 通讯。
向从机发送信息:
int i2c_master_send(const struct i2c_client *client, const char *buf, int count) { int ret; struct i2c_adapter *adap = client->adapter; struct i2c_msg msg; msg.addr = client->addr; msg.flags = client->flags & I2C_M_TEN; msg.len = count; msg.buf = (char *)buf; ret = i2c_transfer(adap, &msg, 1); /* + If everything went ok (i.e. 1 msg transmitted), return #bytes + transmitted, else error code. */ return (ret == 1) ? count : ret; }
向从机读取信息:
int i2c_master_recv(const struct i2c_client *client, char *buf, int count) { struct i2c_adapter *adap = client->adapter; struct i2c_msg msg; int ret; msg.addr = client->addr; msg.flags = client->flags & I2C_M_TEN; msg.flags |= I2C_M_RD; msg.len = count; msg.buf = buf; ret = i2c_transfer(adap, &msg, 1); /* + If everything went ok (i.e. 1 msg received), return #bytes received, + else error code. */ return (ret == 1) ? count : ret; } EXPORT_SYMBOL(i2c_master_recv);
FAQs
Q1: 通信失败,出现这种log:”timeout, ipd: 0x00, state: 1”该如何调试?
A1: 请检查硬件上拉是否给电。
Q2: 调用i2c_transfer返回值为-6?
A2: 返回值为-6表示为NACK错误,即对方设备无应答响应,这种情况一般为外设的问题,常见的有以下几种情况:
I2C地址错误,解决方法是测量I2C波形,确认是否I2C 设备地址错误;
I2C slave 设备不处于正常工作状态,比如未给电,错误的上电时序等;
时序不符合 I2C slave设备所要求也会产生Nack信号。
Q3: 当外设对于读时序要求中间是stop信号不是repeat start信号的时候,该如何处理?
A3: 这时需要调用两次i2c_transfer, I2C read 拆分成两次,修改如下:
static int i2c_read_bytes(struct i2c_client *client, u8 cmd, u8 *data, u8 data_len) { struct i2c_msg msgs[2]; int ret; u8 *buffer; buffer = kzalloc(data_len, GFP_KERNEL); if (!buffer) return -ENOMEM;; msgs[0].addr = client->addr; msgs[0].flags = client->flags; msgs[0].len = 1; msgs[0].buf = &cmd; ret = i2c_transfer(client->adapter, msgs, 1); if (ret < 0) { dev_err(&client->adapter->dev, "i2c read failed\n"); kfree(buffer); return ret; } msgs[1].addr = client->addr; msgs[1].flags = client->flags | I2C_M_RD; msgs[1].len = data_len; msgs[1].buf = buffer; ret = i2c_transfer(client->adapter, &msgs[1], 1); if (ret < 0) dev_err(&client->adapter->dev, "i2c read failed\n"); else memcpy(data, buffer, data_len); kfree(buffer); return ret; }
-
fireflyAIO-3399J启动模式说明主板2019-12-25 3080
-
fireflyAIO-3399J主板接口定义介绍2019-12-24 2901
-
fireflyAIO-3288J主板I2C简介2019-12-20 2463
-
fireflyAIO-3399C--I2C主板控制器介绍2019-12-13 2570
-
fireflyFace-RK3399主板I2C控制器介绍2019-12-04 3986
-
fireflyAIO-3399J主板简介2019-11-05 2667
全部0条评论

快来发表一下你的评论吧 !
